
Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations


Abstract
:1. Introduction
- Characterization of the NLP accuracy in several environments with varying numbers of visible Wi-Fi and cell tower access points;
- Accuracy assessment of the altitude measurements provided by the NLP;
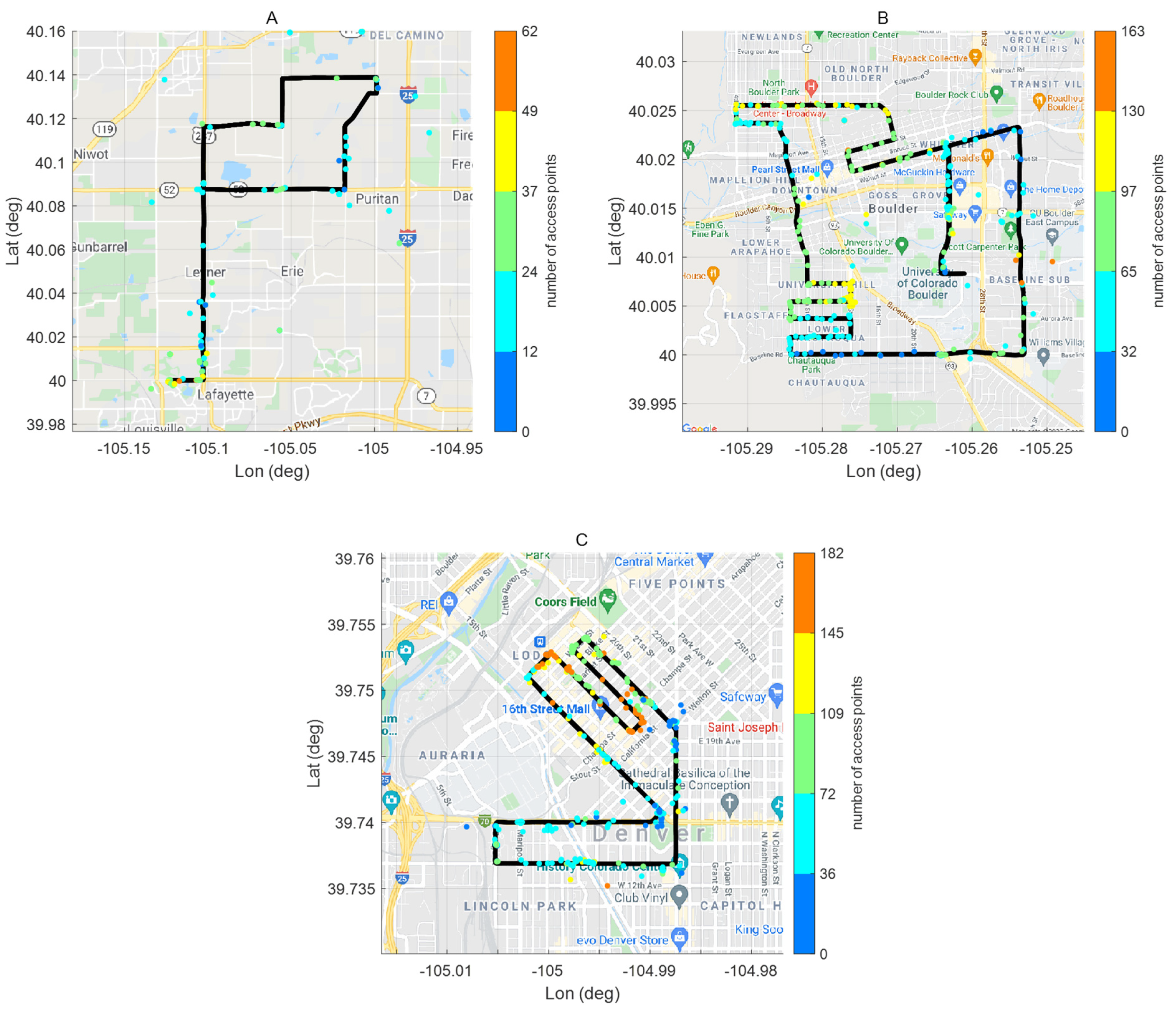
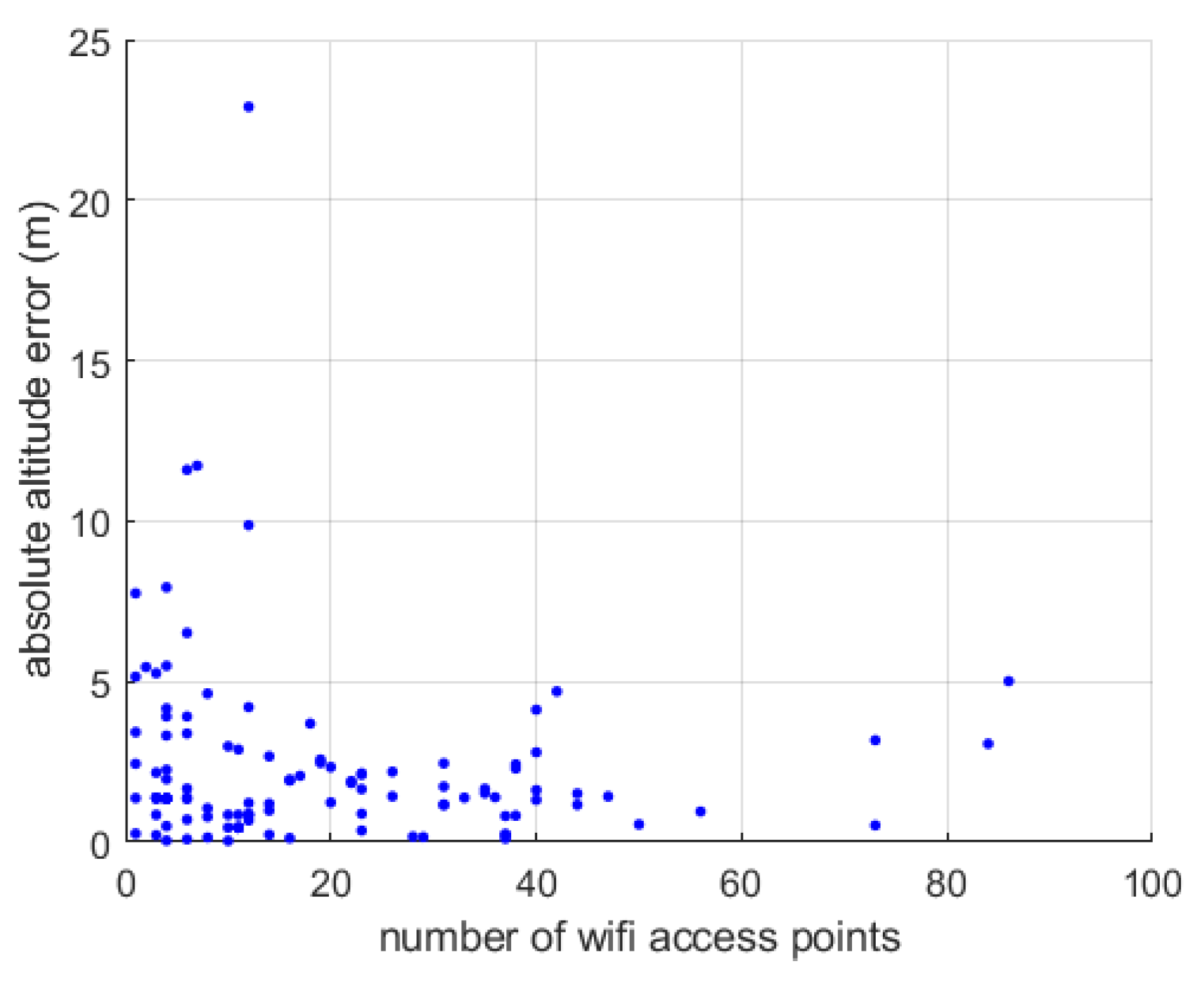
- Determining the correlation between the NLP accuracy and the number of visible access points;
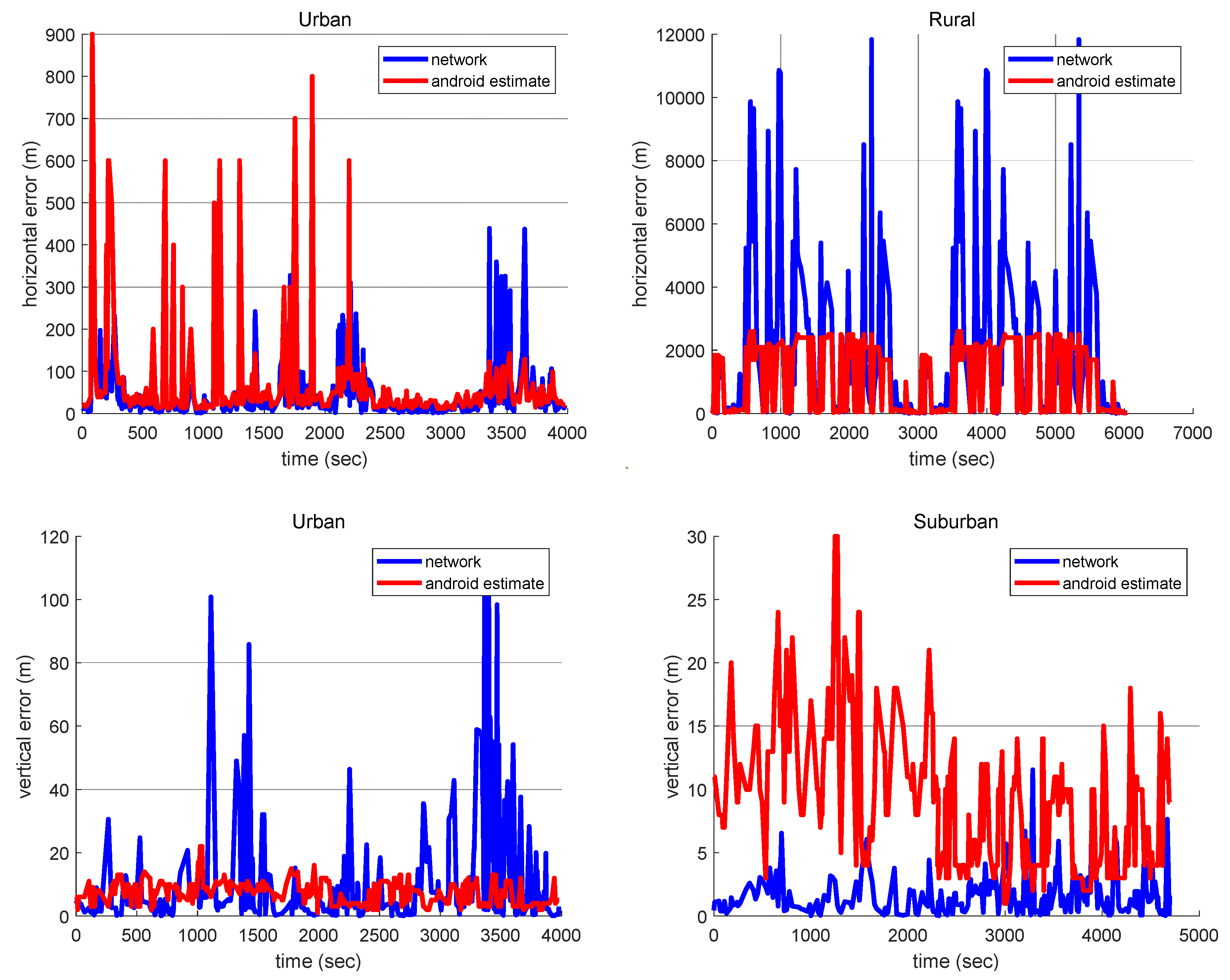
- Validation of the position accuracy estimates provided by the NLP;
- Investigation of the NLP availability, update rate, and latency.
2. Navigation Sensors and Techniques for Drones
2.1. Inertial Sensors
2.2. Vision-Based Sensors
2.3. Barometer
2.4. GNSS
2.5. Ground-Based Localization
2.6. Network Positioning
3. Network Positioning
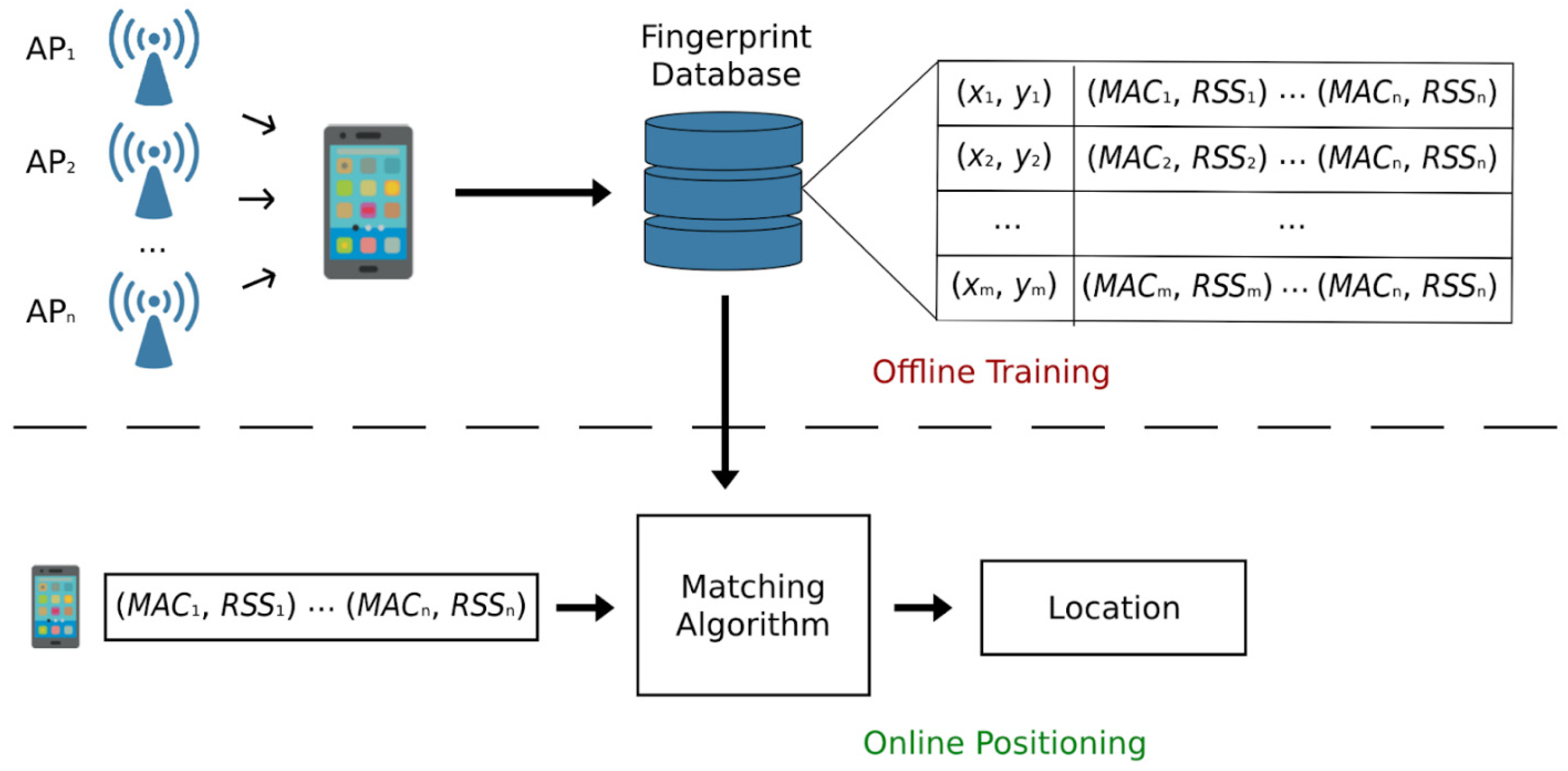
3.1. Wi-Fi Fingerprinting
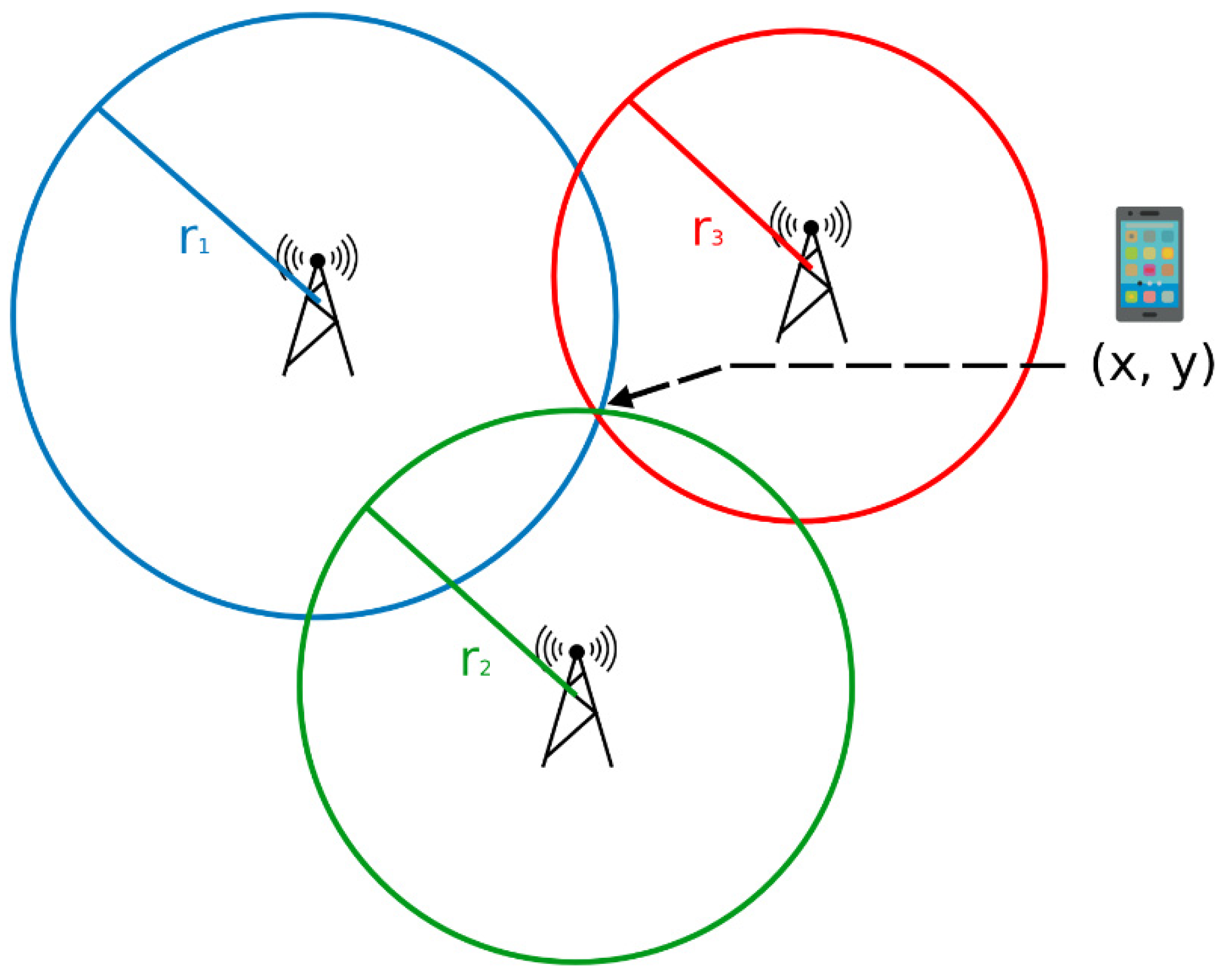
3.2. Cell Positioning
3.3. Wi-Fi RTT Ranging
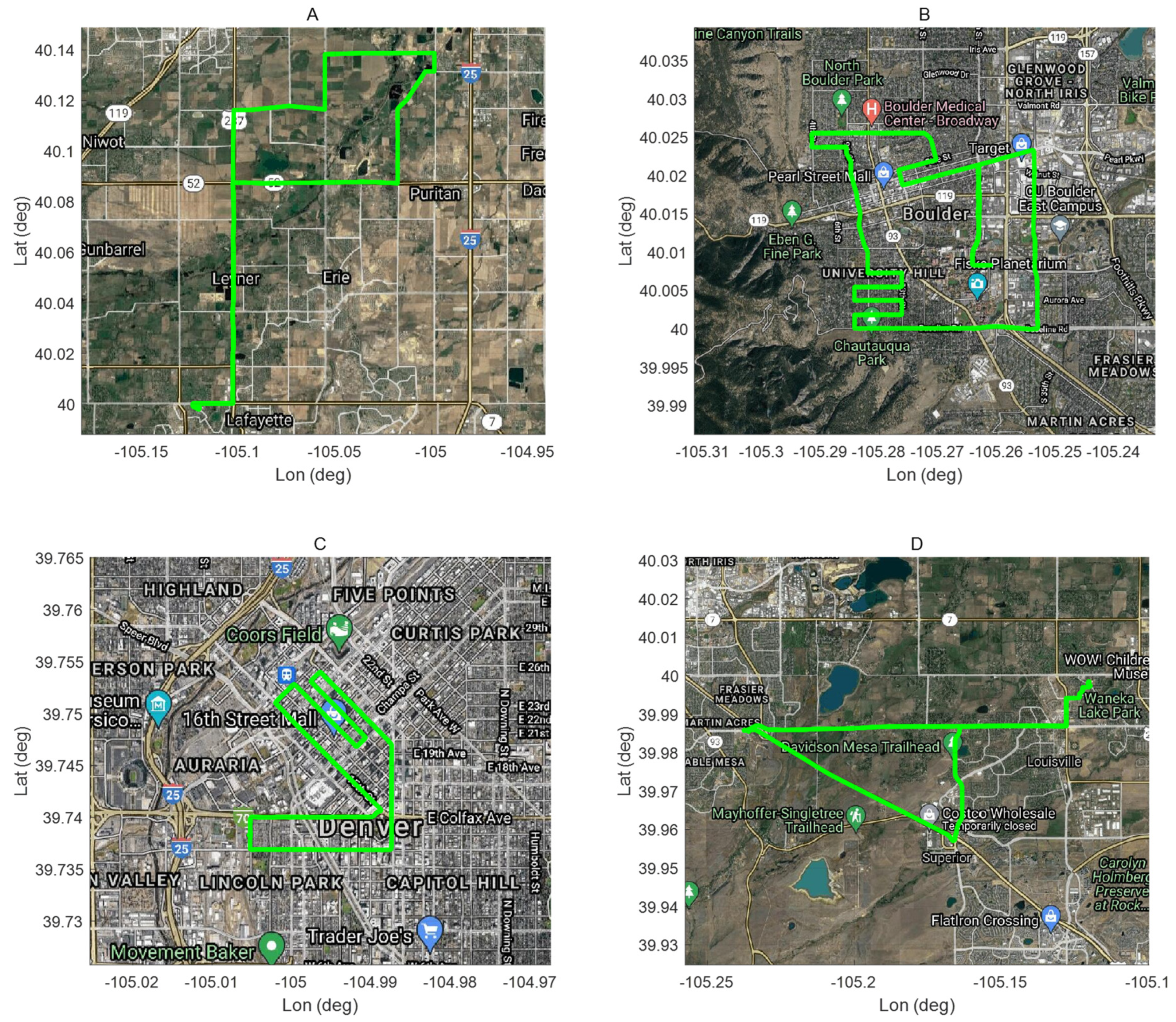
4. Testing Scenario
5. Results
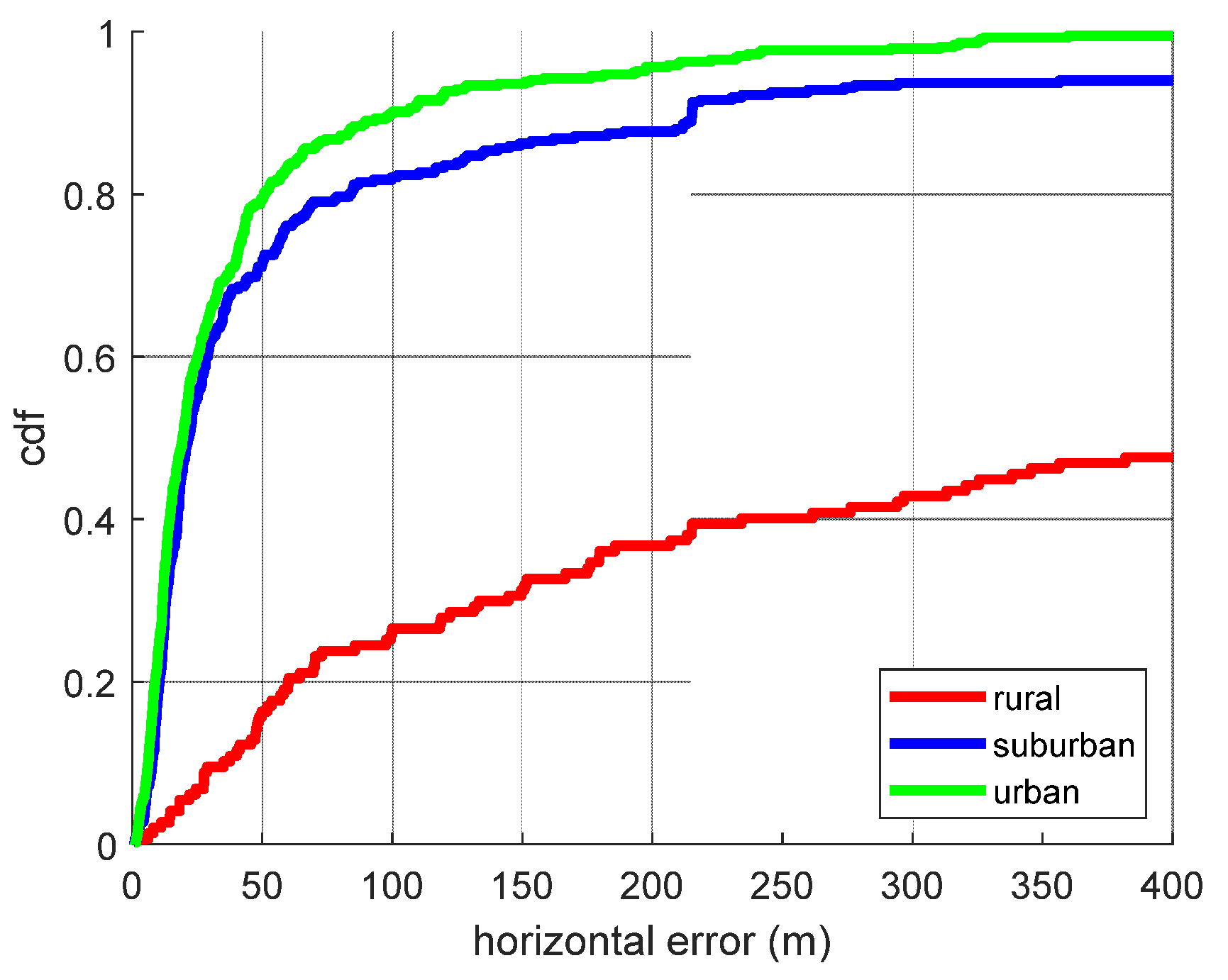
5.1. Horizontal Accuracy
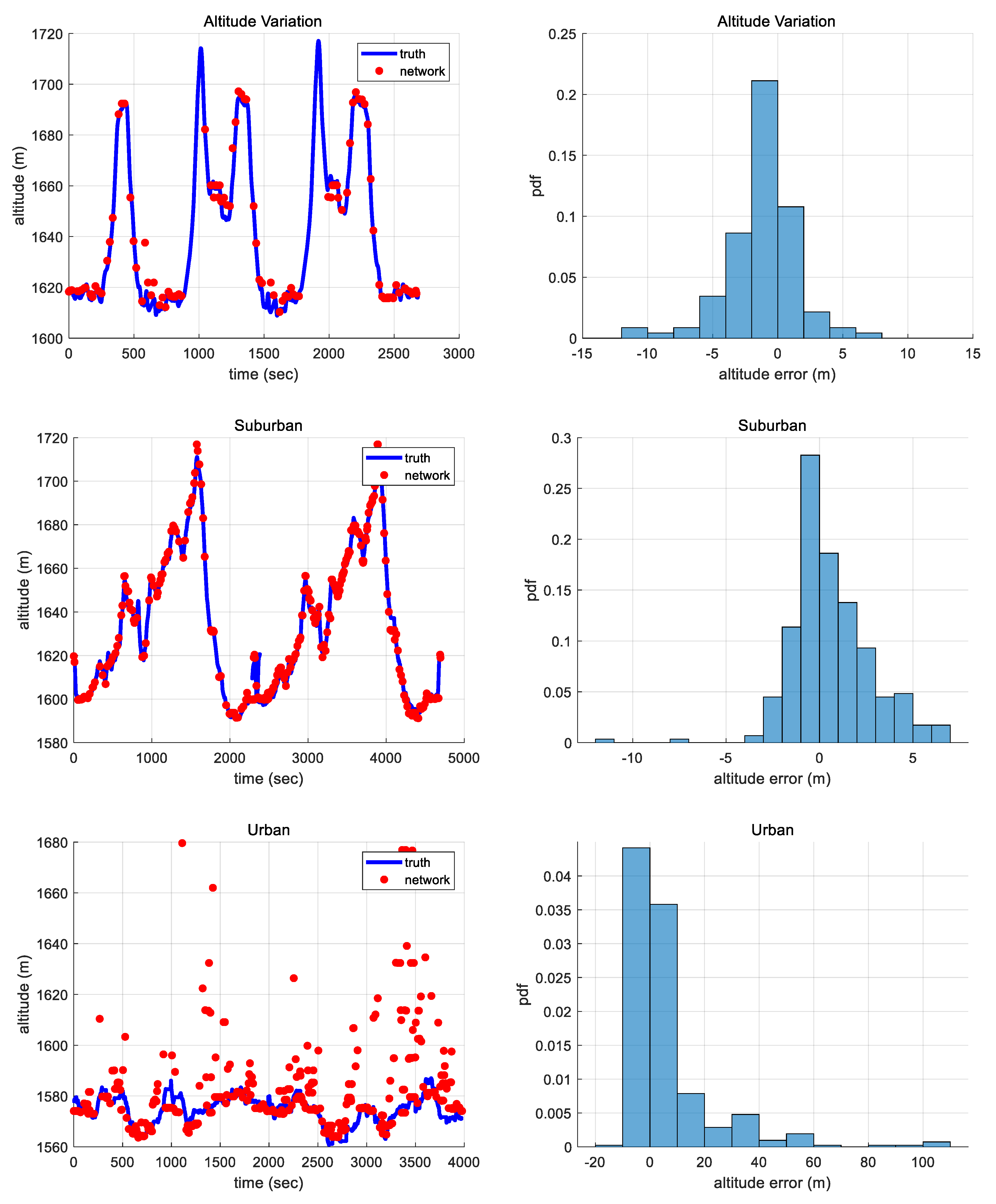
5.2. Vertical Accuracy
5.3. Protection Level
5.4. Availability and Latency
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- FAA Approves Flytrex Drone Delivery Service Expansion, AVweb. 14 December 2021. Available online: https://www.avweb.com/recent-updates/unmanned-vehicles/faa-approves-flytrex-drone-delivery-service-expansion/ (accessed on 20 December 2021).
- Nedelkov, F.; Lee, D.; Miralles, D.; Akos, D. Accuracy and Performance of the Network Location Provider in Android Devices. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2020), Online, 22–25 September 2020; pp. 2152–2165. [Google Scholar]
- Pixhawk 4 Datasheet, Px4. 2021. Available online: https://docs.px4.io/master/en/flight_controller/pixhawk4.html (accessed on 20 December 2021).
- ICM-20689 Datasheet, InvenSense. 2021. Available online: https://invensense.tdk.com/download-pdf/icm-20689-datasheet/ (accessed on 20 December 2021).
- Chow, J.C.K.; Hol, J.D.; Luinge, H. Tightly-Coupled Joint User Self-Calibration of Accelerometers, Gyroscopes, and Magnetometer. Drones 2018, 2, 6. [Google Scholar] [CrossRef] [Green Version]
- Spreading Wings S1000 Datasheet, DJI. 2021. Available online: https://www.dji.com/spreading-wings-s1000/spec (accessed on 20 December 2021).
- Nistér, D.; Naroditsky, O.; Bergen, J. Visual odometry. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2004), Washington, DC, USA, 27 June–2 July 2004; Volume 1, pp. 1–652. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Pressure Altitude, National Oceanic and Atmospheric Administration, National Weather Service. 2021. Available online: https://www.weather.gov/media/epz/wxcalc/pressureAltitude.pdf (accessed on 20 December 2021).
- Lee, D.; Nedelkov, F.; Akos, D.; Park, B. Barometer based GNSS spoofing detection. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Online, 22–25 September 2020; pp. 3268–3282. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006; ISBN 9780970954411. [Google Scholar]
- Geng, J.; Guo, J.; Chang, H.; Li, X. Toward global instantaneous decimeter-level positioning using tightly coupled multi-constellation and multi-frequency GNSS. J. Geod. 2018, 93, 977–991. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K.; Pullen, S.; Enge, P.; Ono, T. Evaluation of Dual-Frequency GBAS Performance using Data from Public Receiver Networks. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigatio (ION 2010), Portland, OR, USA, 21–24 September 2010; pp. 2592–2602. [Google Scholar]
- Mueller, M.S.; Jutzi, B. UAS Navigation with SqueezePoseNet—Accuracy Boosting for Pose Regression by Data Augmentation. Drones 2018, 2, 7. [Google Scholar] [CrossRef] [Green Version]
- Humphreys, T.E.; Ledvina, B.M.; Psiaki, M.L.; O’Hanlon, B.W.; Kintner, P.M. Assessing the spoofing threat: Development of a portable GPS civilian spoofer. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS ITM), Savannah, GA, USA, 16–19 September 2008; pp. 2314–2325. [Google Scholar]
- Kerns, A.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Lee, D.; Miralles, D.; Akos, D.; Konovaltsev, A.; Kurz, L.; Lo, S.; Nedelkov, F. Detection of GNSS Spoofing using NMEA Messages. In Proceedings of the European Navigation Conference (ENC 2020), Online, 23–24 November 2020; pp. 1–10. [Google Scholar]
- Akos, D. Who’s Afraid of the Spoofer? GPS/GNSS Spoofing Detection via Automatic Gain Control (AGC). Navigation 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Miralles, D.; Akos, D.; Lee, D.; Konovaltsev, A.; Kurz, L.; Lo, S. Robust Satellite Navigation in the Android Operating System using the Android Raw GNSS Measurements Engine and Location Providers. In Proceedings of the 2020 European Navigation Conference (ENC), Dresden, Germany, 23–24 November 2020; pp. 1–12. [Google Scholar]
- Miralles, D. Reliable Satellite Radionavigation in the Android Operating System. Ph.D. Thesis, University of Colorado Boulder, Boulder, CO, USA, January 2021. [Google Scholar]
- Rizos, C. Locata: A Positioning System for Indoor and Outdoor Applciations where GNSS Does Not Work. In Proceedings of the 18th Association of Public Authority Surveyors Conference, Canberra, Australia, 13–14 March 2013; pp. 73–83. [Google Scholar]
- Zandbergen, P. Comparison of WiFi positioning on two mobile devices. J. Locat. Based Serv. 2012, 6, 35–50. [Google Scholar] [CrossRef]
- Yang, J.; Varshavsky, A.; Liu, H.; Chen, Y.; Gruteser, M. Accuracy Characterization of Cell Tower Localization. In Proceedings of the 12th ACM International Conference on Ubiquitous Computing (UbiComp ’10), Copenhagen, Denmark, 26–29 September 2010; pp. 223–226. [Google Scholar] [CrossRef]
- Wigle.net. Available online: https://wigle.net/index (accessed on 20 December 2021).
- Leiteritz, R. Copy of Google’s Submission Today to Several National Data Protection Authorities on Vehicle-Based Collection of Wifi Data for Use in Google Location Wbased Services. Available online: http://static.googleusercontent.com/media/www.google.com/en//googleblogs/pdfs/google_submission_dpas_wifi_collection.pdf (accessed on 26 March 2020).
- Han, L.; Jiang, L.; Kong, Q.; Wang, J.; Zhang, A.; Song, S. Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors. Sensors 2019, 19, 2433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, K.; Wang, Y.; Wang, J. Differential Barometric Altimetry Assists Floor Identification in WLAN Location Fingerprinting Study. In Principle and Application Progress in Location-Based Services; Springer: Berlin/Heidelberg, Germany, 2014; pp. 21–29. [Google Scholar]
- Zhao, F.; Luo, H.; Zhao, X.; Pang, Z. HYFI: Hybrid Floor Identification Based on Wireless Fingerprinting and Barometric Pressure. IEEE Trans. Ind. Inform. 2015, 13, 330–341. [Google Scholar] [CrossRef] [Green Version]
- Human Exposure to Radio Frequency Fields: Guidelines for Cellular Antenna Sites, Federal Communications Commission. 2019. Available online: https://www.fcc.gov/consumers/guides/human-exposure-radio-frequency-fields-guidelines-cellular-and-pcs-sites (accessed on 20 December 2021).
- Dwivedi, S.; Shreevastav, R.; Munier, F.; Nygren, J.; Siomina, I.; Lyazidi, Y.; Shrestha, D.; Lindmark, G.; Ernstrom, P.; Stare, E.; et al. Positioning in 5G networks. arXiv 2012, arXiv:2102.03361. [Google Scholar] [CrossRef]
- Ma, C.; Wu, B.; Poslad, S.; Selviah, D.R. Wi-Fi RTT Ranging Performance Characterization and Positioning System Design. IEEE Trans. Mob. Comput. 2020, 21, 740–756. [Google Scholar] [CrossRef]
- Ibrahim, M.; Liu, H.; Jawahar, A.; Nguyen, V. Verification: Accuracy Evaluation of WiFi Fine Time Measurements on an Open Platform. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018; pp. 417–427. [Google Scholar] [CrossRef]
- Wi-Fi Location: Ranging with RTT, Android Developers. 2021. Available online: https://developer.android.com/guide/topics/connectivity/wifi-rtt (accessed on 20 December 2021).
- ZED-F9P module Product Sheet, u-Blox. Available online: https://www.u-blox.com/sites/default/files/ZED-F9P_ProductSummary_UBX-17005151.pdf (accessed on 20 December 2021).
- Location, Android Developers. 2021. Available online: https://developer.android.com/reference/android/location/Location (accessed on 20 December 2021).
- Spens, N.; Lee, D.-K.; Akos, D. An Application for Detecting GNSS Jamming and Spoofing. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 1981–1988. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Details | Network Availability |
|---|---|---|
| Rural | Rural area near Erie, Colorado | Sparse Wi-Fi, Cell |
| Suburban | Downtown Boulder, Colorado | Moderate Wi-Fi, Cell |
| Urban | Downtown Denver, Colorado | Dense Wi-Fi, Cell |
| Altitude Variation | Highway around Boulder, Colorado | Moderate Wi-Fi, Cell |
| Scenario | Access Points | Horizontal Accuracy (m) |
|---|---|---|
| RMS | 68% CEP | |
| Rural | 25 | 1637 |
| Suburban | 75 | 38 |
| Urban | 100 | 32 |
| Scenario | Vertical Accuracy (m) |
|---|---|
| 68% CEP | |
| Altitude Variation | 1.9 |
| Suburban | 1.2 |
| Urban | 4.6 |
| Scenarios | Rate (seconds) | Access Points | Horiz. Accuracy (m) | Vert. Accuracy (m) | Horiz. Bound (%) | Vert. Bound (%) |
|---|---|---|---|---|---|---|
| Typical | RMS | 68% CEP | 68% CEP | |||
| Altitude Variation | 5, 20 | 32 | 318 | 1.9 | - | - |
| Rural | 5, 20 | 25 | 1637 | N/A | 38 | N/A |
| Suburban | 5 | 75 | 38 | 1.2 | 72 | 93 |
| Urban | 5 | 100 | 32 | 4.6 | 75 | 64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, D.-K.; Nedelkov, F.; Akos, D.M. Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations. Drones 2022, 6, 35. https://doi.org/10.3390/drones6020035
Lee D-K, Nedelkov F, Akos DM. Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations. Drones. 2022; 6(2):35. https://doi.org/10.3390/drones6020035
Chicago/Turabian StyleLee, Dong-Kyeong, Filip Nedelkov, and Dennis M. Akos. 2022. "Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations" Drones 6, no. 2: 35. https://doi.org/10.3390/drones6020035
APA StyleLee, D. -K., Nedelkov, F., & Akos, D. M. (2022). Assessment of Android Network Positioning as an Alternative Source of Navigation for Drone Operations. Drones, 6(2), 35. https://doi.org/10.3390/drones6020035