
Drones in B5G/6G Networks as Flying Base Stations


 , , ,
, , ,  and
and 
Abstract
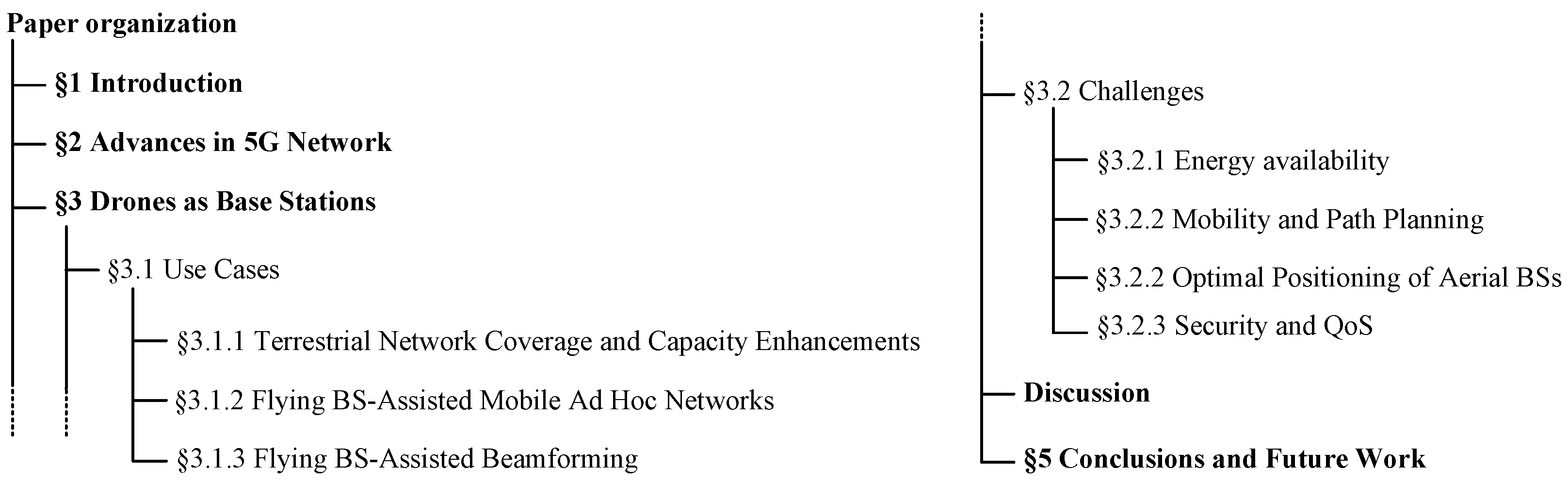
:1. Introduction
2. Advances in 5G Networks
- Partial or no support for advanced services, namely the use-cases mentioned in the presented paper and an advanced slicing mechanism associated with application offloading;
- The inability to discover and directly expose the entire range of smart 5G infrastructure capabilities, which may be advertised by an underlying network function virtualization orchestrator (NFVO) platform.
3. Drones as Base Stations
3.1. Use Cases
- The extension of terrestrial network coverage and capacity;
- The assistance of mobile ad hoc networks (MANETs);
- Beamforming applications.
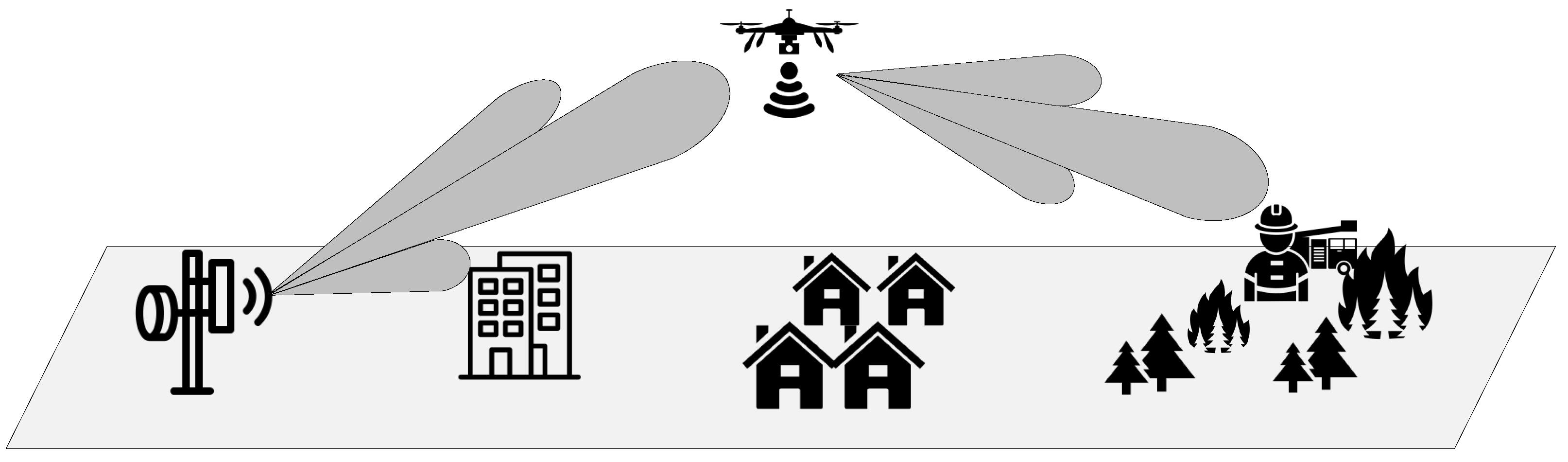
3.1.1. Terrestrial Network Coverage and Capacity Enhancements
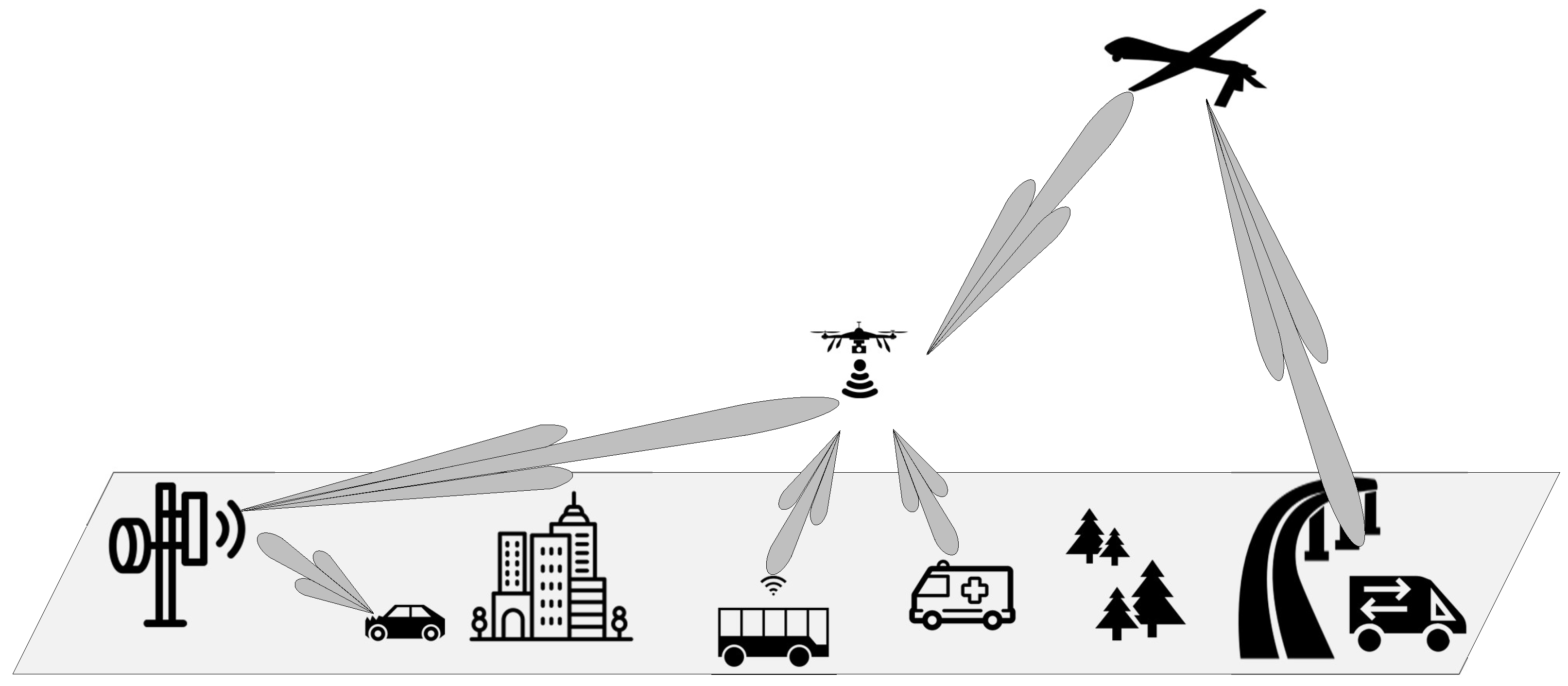
3.1.2. Flying BS-Assisted Mobile Ad Hoc Networks
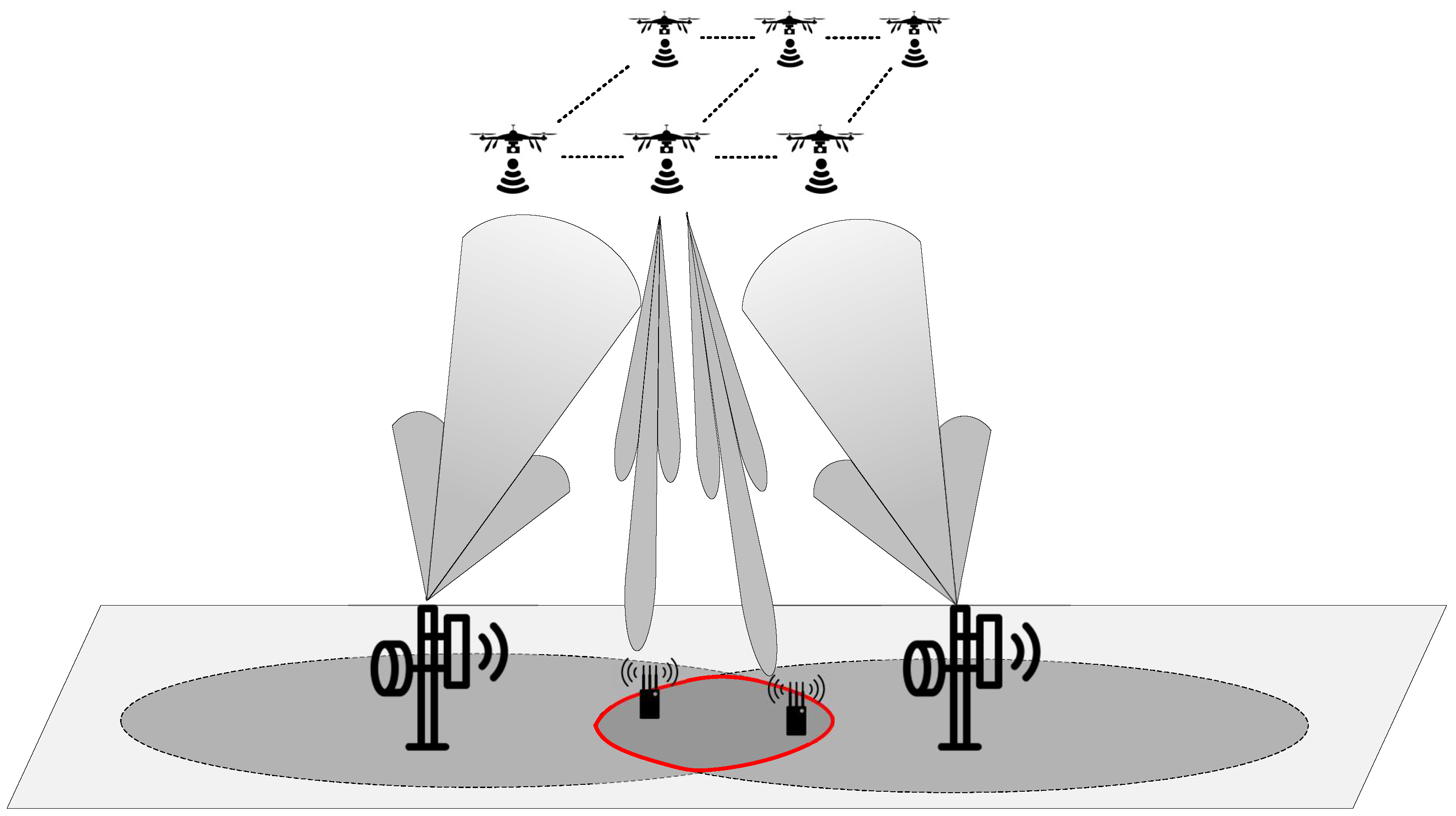
3.1.3. Flying BS-Assisted Beamforming
- The number of antenna elements is not limited by spatial constraints;
- Beamforming gain can be increased on-demand by adjusting array element (drone) spacing;
- Drones’ mobility allows for effective beam-steering in virtually any 3D direction;
- Utilization of drone swarms within an array formation can provide the capability to form a massive antenna array which can virtually accommodate any arbitrary shape and perform beamforming;
- Energy optimization or tethering (discussed in Section 3.2.1) can increase reliability to near terrestrial-node levels.
3.2. Challenges
3.2.1. Energy Availability
- Energy consumed for the purpose of flying and hovering above a desired location;
- Energy consumed for communication and on-board processing;
3.2.2. Mobility and Path Planning
- The number of aerial BSs participating in the relaying;
- The type of interfaces among these participating nodes (inter-drone relaying, conjoint formation of array antennas);
- The elevation, angle, position and velocity of each node relative to the respective gNB;
- Energy availability, expected energy expenditure and estimated uptime for new links;
- The topology of the terrain and potential blockages in LOS.
3.2.3. Optimal Positioning
- Task 1: Select the optimal clusters of a given number of UEs to be simultaneously served by a NOMA network;
- Task 2: Allocating the optimal transmission power to each node;
- Task 3: Determining the position of the flying BS in the 3D space.
- The available propulsion energy;
- The guaranteed minimum capacity for each mobile user.
- Associating UEs with the best-suited aerial BS;
- Finding optimal positions of all aerial BSs.
- Horizontal positioning of drones (minimization of distance sum);
- Vertical positioning of drones (maximization of coverage).
3.2.4. Security and QoS
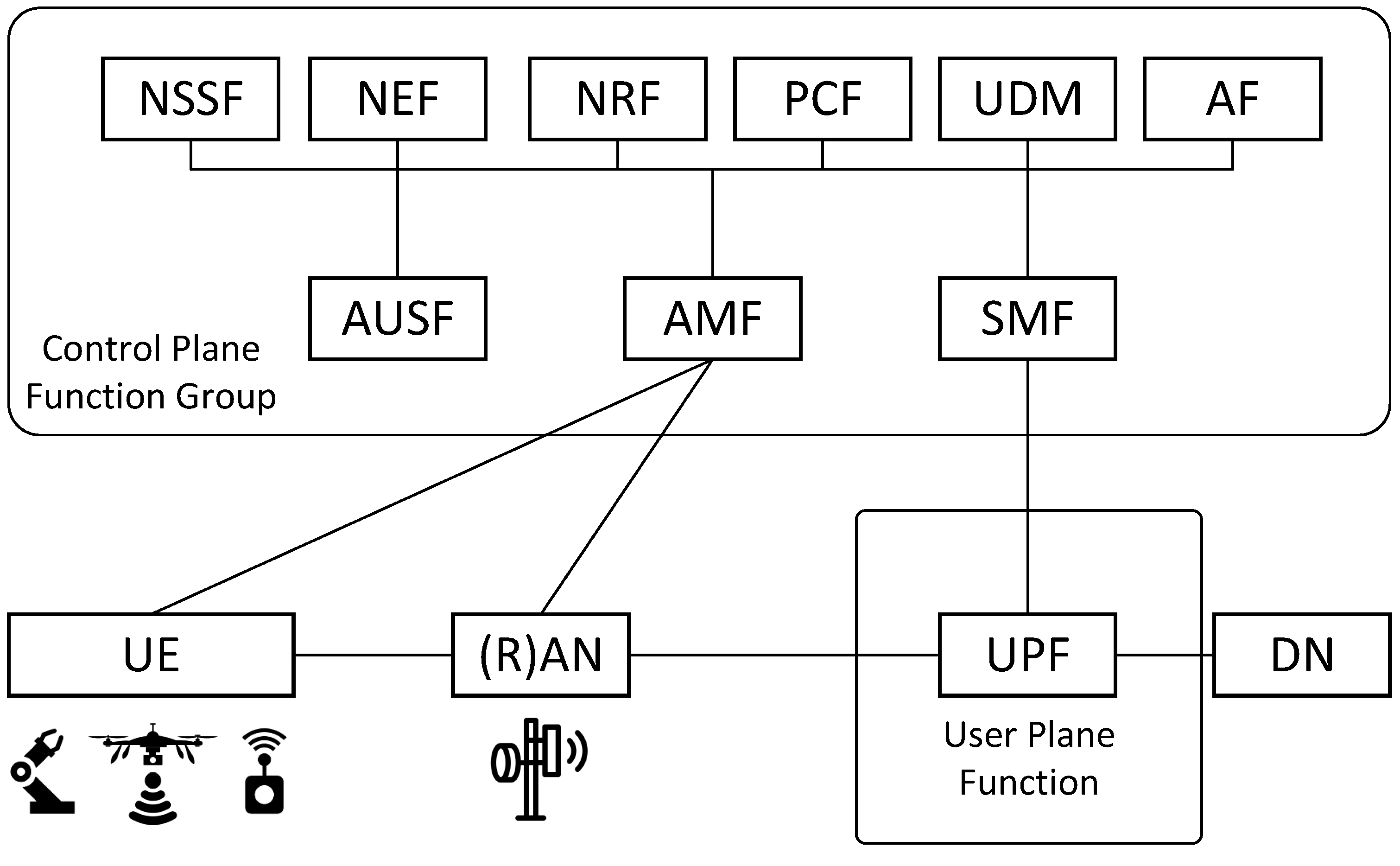
- gNB, the terrestrial cellular base station (RAN);
- AMF, the mobility management function of (core network).
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pliatsios, D.; Goudos, S.K.; Lagkas, T.; Argyriou, V.; Boulogeorgos, A.A.A.; Sarigiannidis, P. Drone-Base-Station for Next-Generation Internet-of-Things: A Comparison of Swarm Intelligence Approaches. IEEE Open J. Antennas Propag. 2022, 3, 32–47. [Google Scholar] [CrossRef]
- Kishk, M.; Bader, A.; Alouini, M.S. Aerial Base Station Deployment in 6G Cellular Networks Using Tethered Drones: The Mobility and Endurance Tradeoff. IEEE Veh. Technol. Mag. 2020, 15, 103–111. [Google Scholar] [CrossRef]
- Kaur, S.; Randhawa, S. Google LOON: Balloon-powered internet for everyone. AIP Conf. Proc. 2018, 2034, 020006. [Google Scholar] [CrossRef]
- Saarnisaari, H.; de Lima, C.M. 5G NR over Satellite Links: Evaluation of Synchronization and Random Access Processes. In Proceedings of the 2019 21st International Conference on Transparent Optical Networks (ICTON), Angerrs, France, 9–13 July 2019; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Rekkas, V.P.; Sotiroudis, S.; Sarigiannidis, P.; Karagiannidis, G.K.; Goudos, S.K. Unsupervised Machine Learning in 6G Networks -State-of-the-art and Future Trends. In Proceedings of the 2021 10th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 5–7 July 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Bouzinis, P.S.; Diamantoulakis, P.D.; Karagiannidis, G.K. Wireless Federated Learning (WFL) for 6G Networks4Part I: Research Challenges and Future Trends. IEEE Commun. Lett. 2022, 26, 3–7. [Google Scholar] [CrossRef]
- Bouzinis, P.S.; Diamantoulakis, P.D.; Karagiannidis, G.K. Wireless Federated Learning (WFL) for 6G Networks—Part II: The Compute-Then-Transmit NOMA Paradigm. IEEE Commun. Lett. 2022, 26, 8–12. [Google Scholar] [CrossRef]
- Chaschatzis, C.; Karaiskou, C.; Mouratidis, E.G.; Karagiannis, E.; Sarigiannidis, P.G. Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning. Drones 2022, 6, 3. [Google Scholar] [CrossRef]
- Rekkas, V.P.; Sotiroudis, S.; Sarigiannidis, P.; Wan, S.; Karagiannidis, G.K.; Goudos, S.K. Machine Learning in Beyond 5G/6G Networks—State-of-the-Art and Future Trends. Electronics 2021, 10, 2786. [Google Scholar] [CrossRef]
- Fattore, U.; Liebsch, M.; Bernardos, C.J. UPFlight: An enabler for Avionic MEC in a drone-extended 5G mobile network. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Bariah, L.; Mohjazi, L.; Muhaidat, S.; Sofotasios, P.C.; Kurt, G.K.; Yanikomeroglu, H.; Dobre, O.A. A Prospective Look: Key Enabling Technologies, Applications and Open Research Topics in 6G Networks. IEEE Access 2020, 8, 174792–174820. [Google Scholar] [CrossRef]
- Selim, M.Y.; Kamal, A.E. Post-Disaster 4G/5G Network Rehabilitation Using Drones: Solving Battery and Backhaul Issues. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Livanos, G.; Ramnalis, D.; Polychronos, V.; Balomenou, P.; Sarigiannidis, P.; Kakamoukas, G.; Karamitsou, T.; Angelidis, P.; Zervakis, M. Extraction of Reflectance Maps for Smart Farming Applications Using Unmanned Aerial Vehicles. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutorials 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Slalmi, A.; Chaibi, H.; Chehri, A.; Saadane, R.; Jeon, G. Toward 6G: Understanding network requirements and key performance indicators. Trans. Emerg. Telecommun. Technol. 2021, 32, e4201. [Google Scholar] [CrossRef]
- Saym, M.M.; Mahbub, M.; Ahmed, F. Coverage Maximization by Optimal Positioning and Transmission Planning for UAV-Assisted Wireless Communications. In Proceedings of the 2021 International Conference on Science Contemporary Technologies (ICSCT), Dhaka, Bangladesh, 5–7 August 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Su, Y.; LiWang, M.; Hosseinalipour, S.; Huang, L.; Dai, H. Optimal Position Planning of UAV Relays in UAV-assisted Vehicular Networks. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Virtual, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Seifi, N.; Zhang, J.; Heath, R.; Svensson, T.; Coldrey, M. Coordinated 3D Beamforming for Interference Management in Cellular Networks. Wirel. Commun. IEEE Trans. 2014, 13, 5396–5410. [Google Scholar] [CrossRef]
- Egarguin, N.J.A.; Jackson, D.R.; Onofrei, D.; Leclerc, J.; Becker, A. Adaptive Beamforming Using Scattering From a Drone Swarm. In Proceedings of the 2020 IEEE Texas Symposium on Wireless and Microwave Circuits and Systems (WMCS), Waco, TX, USA, 26–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Vaezy, H.; Salehi Heydar Abad, M.; Ercetin, O.; Yanikomeroglu, H.; Omidi, M.J.; Naghsh, M.M. Beamforming for Maximal Coverage in mmWave Drones: A Reinforcement Learning Approach. IEEE Commun. Lett. 2020, 24, 1033–1037. [Google Scholar] [CrossRef]
- Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Argyriou, V.; Sarigiannidis, A.; Eleftherakis, G.; Zhang, J. Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks. Sensors 2021, 21, 3936. [Google Scholar] [CrossRef] [PubMed]
- Becvar, Z.; Mach, P.; Nikooroo, M. Reducing Energy Consumed by Repositioning of Flying Base Stations Serving Mobile Users. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power Supply Architectures for Drones—A Review. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 5826–5831. [Google Scholar] [CrossRef]
- Zhao, M.M.; Shi, Q.; Zhao, M.J. Efficiency Maximization for UAV-Enabled Mobile Relaying Systems With Laser Charging. IEEE Trans. Wirel. Commun. 2020, 19, 3257–3272. [Google Scholar] [CrossRef] [Green Version]
- Pijnappel, T.R.; van den Berg, J.L.; Borst, S.C.; Litjens, R. Drone-Assisted Cellular Networks: Optimal Positioning and Load Management. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Kouroshnezhad, S.; Peiravi, A.; Haghighi, M.S.; Jolfaei, A. Energy-Efficient Drone Trajectory Planning for the Localization of 6G-Enabled IoT Devices. IEEE Internet Things J. 2021, 8, 5202–5210. [Google Scholar] [CrossRef]
- Nikooroo, M.; Becvar, Z. Optimal Positioning of Flying Base Stations and Transmission Power Allocation in NOMA Networks. IEEE Trans. Wirel. Commun. 2021, 1. [Google Scholar] [CrossRef]
- Plachy, J.; Becvar, Z.; Mach, P.; Marik, R.; Vondra, M. Joint Positioning of Flying Base Stations and Association of Users: Evolutionary-Based Approach. IEEE Access 2019, 7, 11454–11463. [Google Scholar] [CrossRef]
- Pliatsios, D.; Sarigiannidis, P.; Goudos, S.K.; Psannis, K. 3D Placement of Drone-Mounted Remote Radio Head for Minimum Transmission Power Under Connectivity Constraints. IEEE Access 2020, 8, 200338–200350. [Google Scholar] [CrossRef]
- Pliatsios, D.; Sarigiannidis, P.; Moscholios, I.D.; Tsiakalos, A. Cost-efficient Remote Radio Head Deployment in 5G Networks Under Minimum Capacity Requirements. In Proceedings of the 2019 Panhellenic Conference on Electronics Telecommunications (PACET), Volos, Greece, 8–9 November 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Feng, C.; Liu, B.; Guo, Z.; Yu, K.; Qin, Z.; Choo, K.K.R. Blockchain-based Cross-domain Authentication for Intelligent 5G-enabled Internet of Drones. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Odarchenko, R.; Usik, P.; Volkov, O.; Simakhin, V.; Gospodarchuk, O.; Burmak, Y. 5G Networks Cyberincidents Monitoring System for Drone Communications. In Proceedings of the 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 22–24 October 2019; pp. 165–169. [Google Scholar] [CrossRef]
- Zhang, Q.; Saad, W.; Bennis, M.; Lu, X.; Debbah, M.; Zuo, W. Predictive Deployment of UAV Base Stations in Wireless Networks: Machine Learning Meets Contract Theory. IEEE Trans. Wirel. Commun. 2021, 20, 637–652. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P.; Wan, S. A survey on FANET routing from a cross-layer design perspective. J. Syst. Archit. 2021, 120, 102281. [Google Scholar] [CrossRef]
- Nikam, V.B.; Arora, A.; Lambture, D.; Zaveri, J.; Shinde, P.; More, M. Optimal Positioning of Small Cells for Coverage and Cost Efficient 5G Network Deployment: A Smart Simulated Annealing Approach. In Proceedings of the 2020 IEEE 3rd 5G World Forum (5GWF), Bangalore, India, 10–12 September 2020; pp. 454–459. [Google Scholar] [CrossRef]
- Hunukumbure, M.; Tsoukaneri, G. Cost Analysis for Drone Based 5G eMBB Provision to Emergency Services. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G Networks: Use Cases and Technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | 5G | 6G |
|---|---|---|
| Peak Frequency | 110 GHz (W-band) | 10 THz |
| Peak Spectral Efficiency | 30 bps/Hz | 100 bps/Hz |
| Peak Data-rate | 20 Gbps | 1000 Gbps |
| End-to-End Latency | 10 ms | 1 ms |
| Connection Density | 1 million per sq. kilometer | 10 million per sq. kilometer |
| Supported Node Mobility | 500 km/h | 1000 km/h |
| Consideration and/or Analysis of: | ||||||
|---|---|---|---|---|---|---|
| Related Work | Drone-BSs | 5G/B5G/6G | Energy Availability | Path Planning | BS Positioning | Drone-BS Use Cases |
| Nikooroo et. al. | ✓ | ✓ | ✓ | - | ✓ | - |
| Mach et. al. | ✓ | - | ✓ | - | ✓ | - |
| Plachy et. al. | ✓ | - | - | - | ✓ | - |
| Zhao et. al. | ✓ | - | - | - | ✓ | - |
| Fotouhi et. al. | ✓ | - | - | - | - | ✓ |
| Becvar et. al. | ✓ | - | ✓ | - | - | ✓ |
| Bayerlein et. al. | ✓ | - | - | ✓ | - | - |
| Zhang et. al. | ✓ | - | - | - | ✓ | - |
| Alzenad et. al. | ✓ | - | ✓ | - | ✓ | - |
| Bushnaq et. al. | ✓ | - | - | - | ✓ | ✓ |
| Mozaffari et. al. | ✓ | ✓ | - | - | - | - |
| Our work | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| UAV Type | Stationary Flight (Yes/No) | Typical Battery Life (mins) | Typical Velocity (m/s) | Typical Payload (kg) |
|---|---|---|---|---|
| Multi-rotor | yes | =<15 | =<11 | =<2.5 |
| Fixed-wing | no | =<60 | =<22 | =<14 |
| Baloon | yes | =<60 | =<2.5 | =<4.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. https://doi.org/10.3390/drones6020039
Amponis G, Lagkas T, Zevgara M, Katsikas G, Xirofotos T, Moscholios I, Sarigiannidis P. Drones in B5G/6G Networks as Flying Base Stations. Drones. 2022; 6(2):39. https://doi.org/10.3390/drones6020039
Chicago/Turabian StyleAmponis, Georgios, Thomas Lagkas, Maria Zevgara, Georgios Katsikas, Thanos Xirofotos, Ioannis Moscholios, and Panagiotis Sarigiannidis. 2022. "Drones in B5G/6G Networks as Flying Base Stations" Drones 6, no. 2: 39. https://doi.org/10.3390/drones6020039
APA StyleAmponis, G., Lagkas, T., Zevgara, M., Katsikas, G., Xirofotos, T., Moscholios, I., & Sarigiannidis, P. (2022). Drones in B5G/6G Networks as Flying Base Stations. Drones, 6(2), 39. https://doi.org/10.3390/drones6020039