
Water Hyacinth (Eichhornia crassipes) Detection Using Coarse and High Resolution Multispectral Data

 ,
,  , ,
, ,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
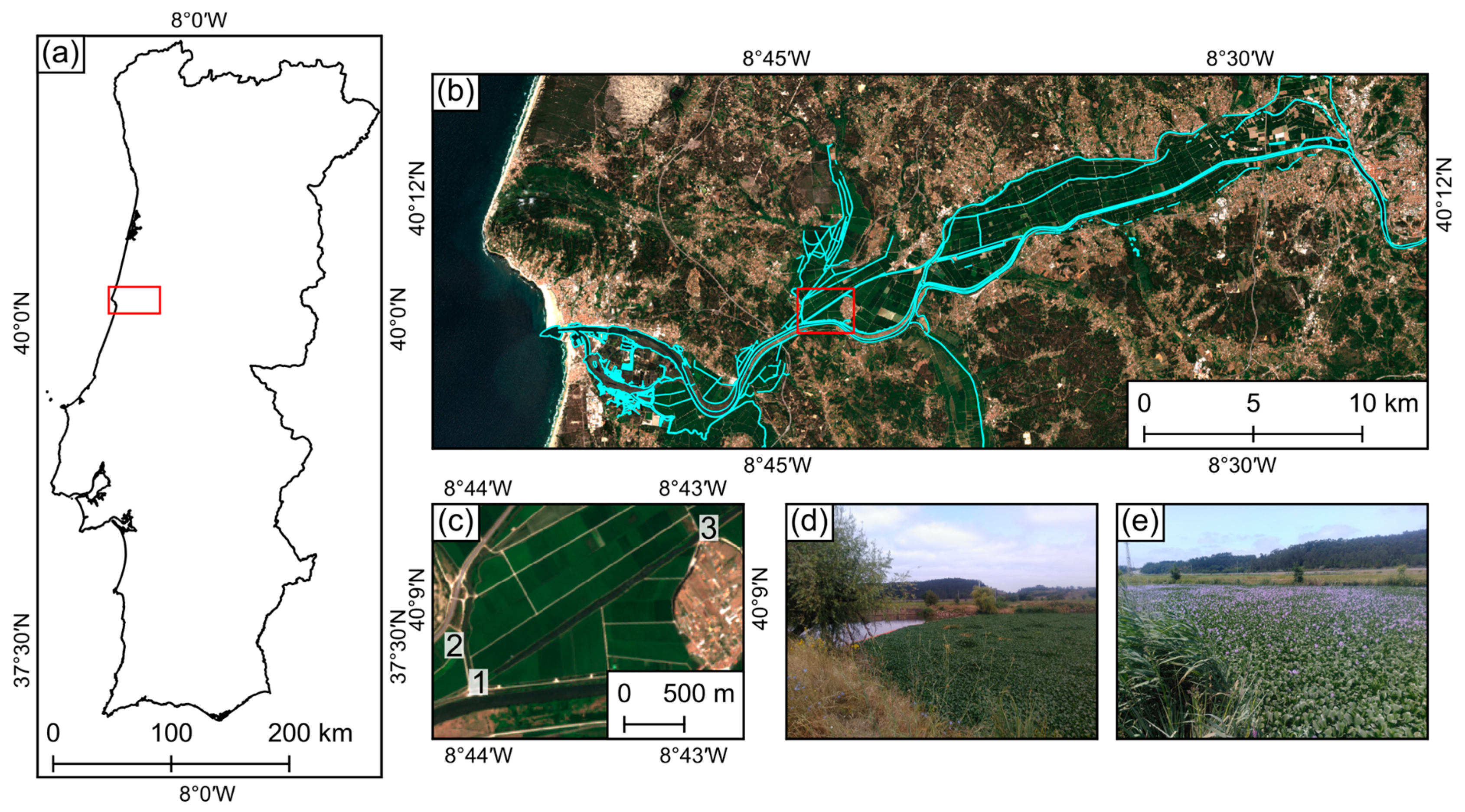
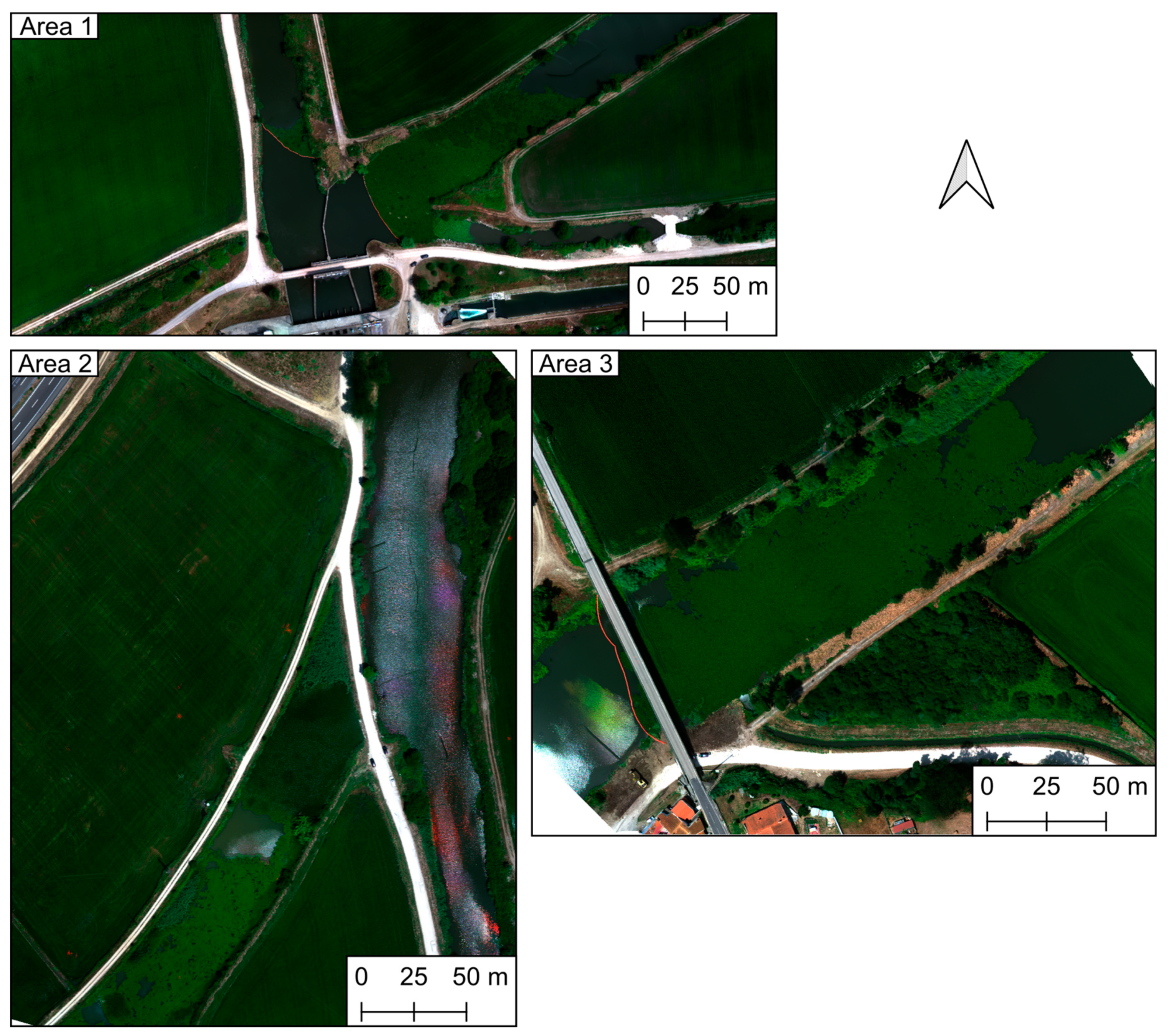
2.1. Study Area
2.2. Remotely Sensed Data
2.2.1. Unmanned Aerial Vehicle and Data Acquisition
2.2.2. Satellite Data
2.3. UAV Data Processing
2.4. Water Hyacinth Classification Procedure
3. Results
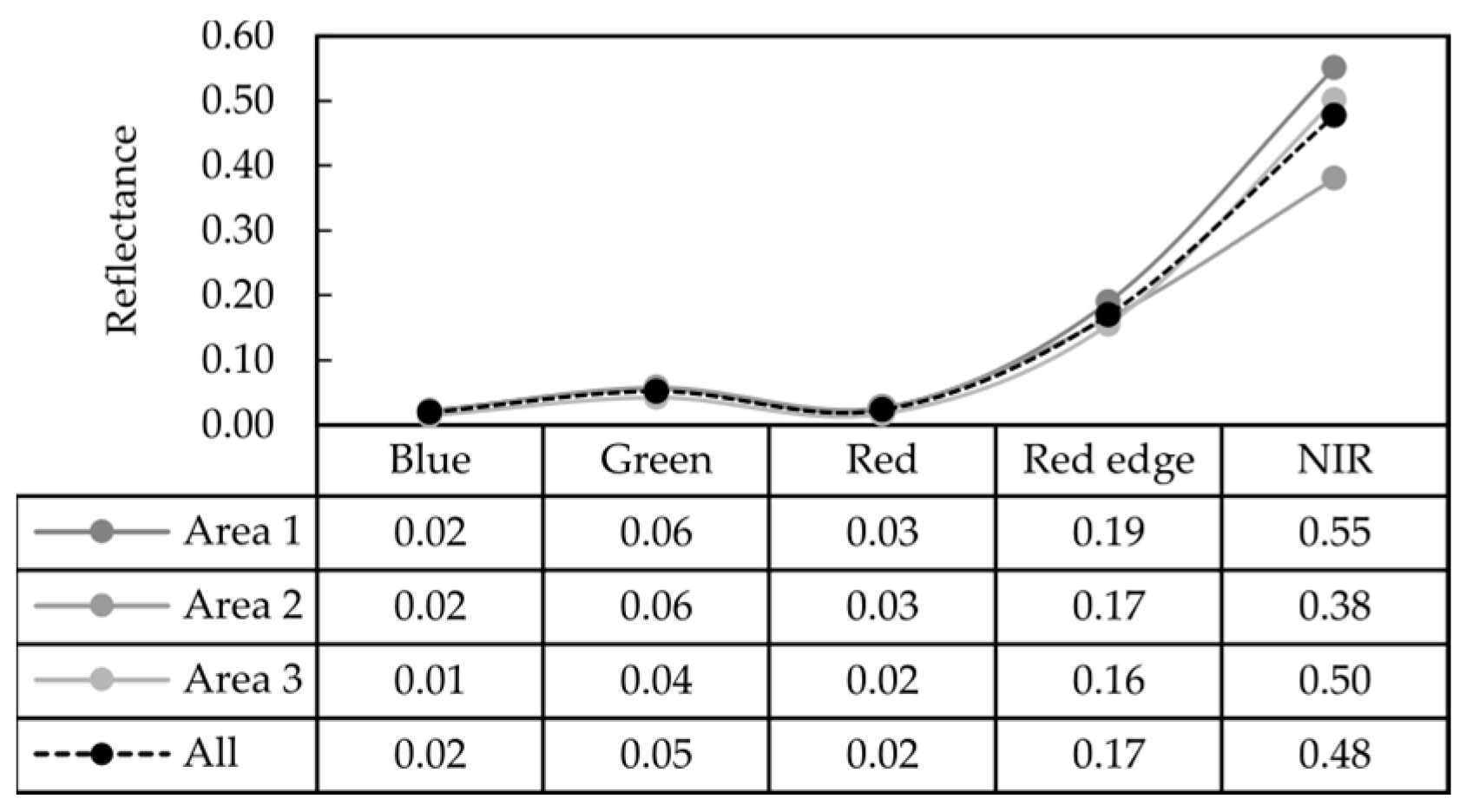
3.1. Dataset Characterization
3.2. Classification Performance of Each Classifier
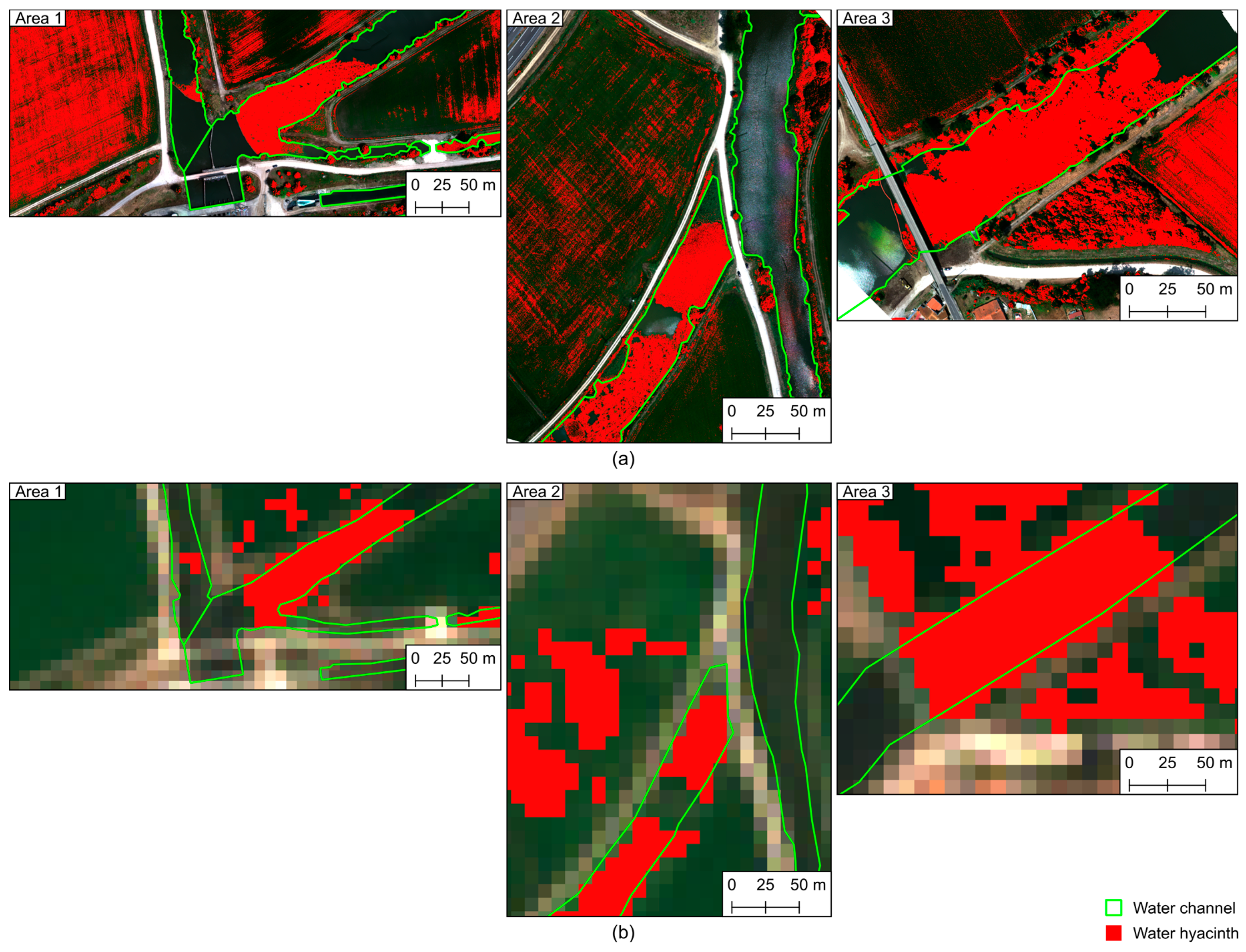
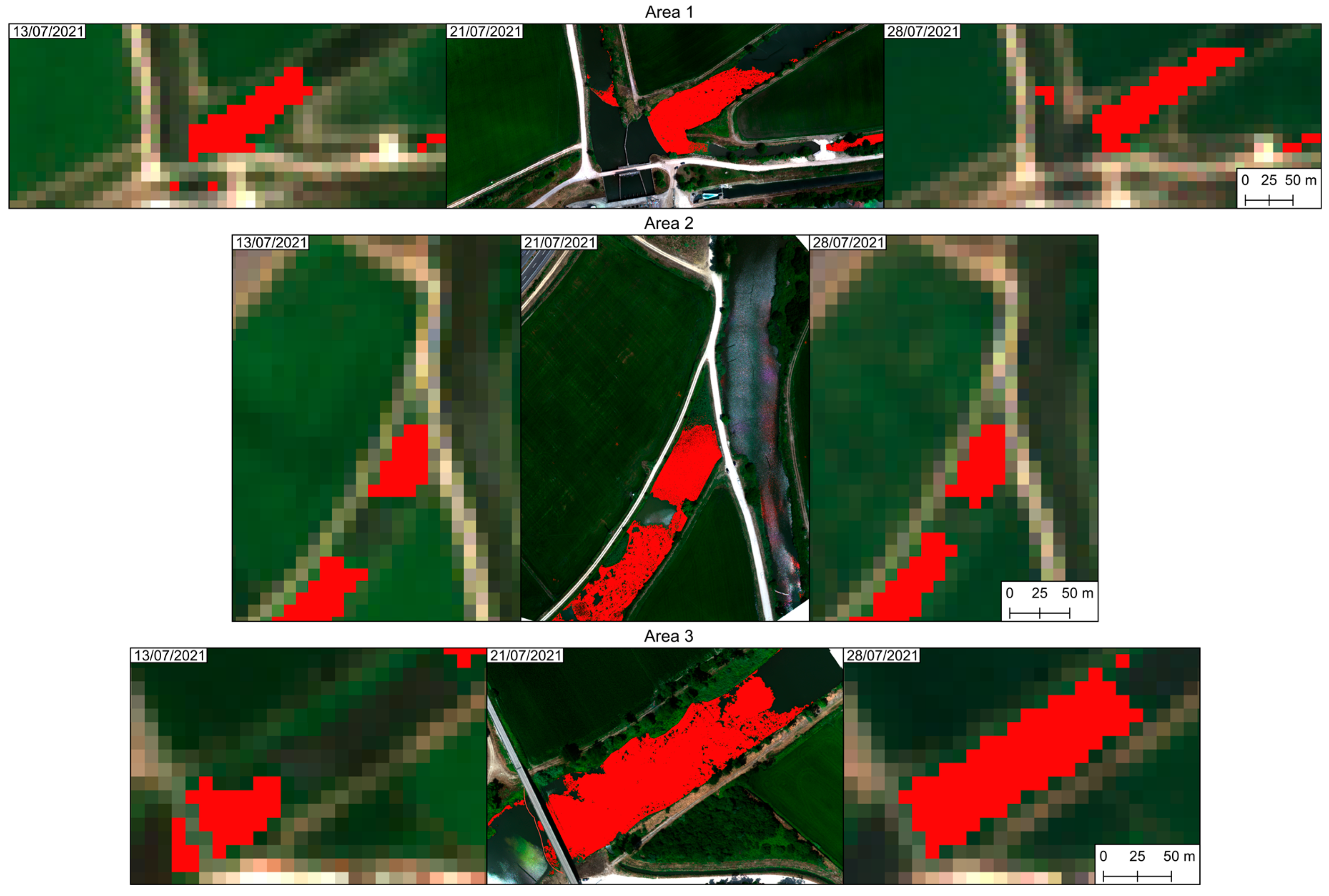
3.3. Prediction of Water Hyacinth Dispersion
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kass, M.J. Summary for Policymakers of the Global Assessment Report on Biodiversity and Ecosystem Services. Nat. Resour. Environ. 2020, 34, 62. [Google Scholar]
- Hulme, P.E.; Pyšek, P.; Nentwig, W.; Vilà, M. Will Threat of Biological Invasions Unite the European Union? Science 2009, 324, 40–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haubrock, P.J.; Turbelin, A.J.; Cuthbert, R.N.; Novoa, A.; Taylor, N.G.; Angulo, E.; Ballesteros-Mejia, L.; Bodey, T.W.; Capinha, C.; Diagne, C.; et al. Economic Costs of Invasive Alien Species across Europe. NeoBiota 2021, 67, 153–190. [Google Scholar] [CrossRef]
- Gallardo, B.; Clavero, M.; Sánchez, M.I.; Vilà, M. Global Ecological Impacts of Invasive Species in Aquatic Ecosystems. Glob. Change Biol. 2016, 22, 151–163. [Google Scholar] [CrossRef] [PubMed]
- Cuthbert, R.N.; Pattison, Z.; Taylor, N.G.; Verbrugge, L.; Diagne, C.; Ahmed, D.A.; Leroy, B.; Angulo, E.; Briski, E.; Capinha, C.; et al. Global Economic Costs of Aquatic Invasive Alien Species. Sci. Total Environ. 2021, 775, 145238. [Google Scholar] [CrossRef] [PubMed]
- Lowe, S.; Browne, M.; Boudjelas, S.; De Poorter, M. 100 of the World’s Worst Invasive Alien Species: A Selection from the Global Invasive Species Database; Invasive Species Specialist Group Auckland: Auckland, New Zealand, 2000; Volume 12. [Google Scholar]
- Kriticos, D.J.; Brunel, S. Assessing and Managing the Current and Future Pest Risk from Water Hyacinth, (Eichhornia Crassipes), an Invasive Aquatic Plant Threatening the Environment and Water Security. PLoS ONE 2016, 11, e0120054. [Google Scholar] [CrossRef] [PubMed]
- Coetzee, J.A.; Hill, M.P.; Ruiz-Téllez, T.; Starfinger, U.; Brunel, S. Monographs on Invasive Plants in Europe N° 2: Eichhornia Crassipes (Mart.) Solms. Bot. Lett. 2017, 164, 303–326. [Google Scholar] [CrossRef]
- Duarte, C.; Agusti, S.; Moreira, I. Water Hyacinth (Eichornia Crassipes (Mart.) Solms) and Water Milfoil (Myriophyllum Aquaticum Vell. Verde) in Portugal. In Proceedings of the 3rd Symposium on Weed Problems in the Mediterranean Area; EWRS: Oeiras, Portugal, 1984; Volume 1. Available online: http://hdl.handle.net/10400.5/16306 (accessed on 30 December 2021).
- Figueiredo, J.; Duarte, C.; Moreira, I.; Agusti, S. As Infestantes Aquáticas Nos Sistemas de Irrigação e Drenagem Do Ribatejo. Recur. Hídricos 1984, 5, 5–10. [Google Scholar]
- Moreira, I.; Monteiro, A.; Ferreia, M.; Catarino, L.; Franco, J.; Rebelo, T. Estudos Sobre Biologia e Combate Do Jacinto Aquático (Eichhornia Crassipes (Mart. Solms-Laub.)) Em Portugal. Garcia Da Horta Série Botânica 1999, 14, 191–198. [Google Scholar]
- Albano Pérez, E.; Ruiz Téllez, T.; Sánchez Guzmán, J.M. Influence of Physico-Chemical Parameters of the Aquatic Medium on Germination of Eichhornia Crassipes Seeds. Plant Biol. 2011, 13, 643–648. [Google Scholar] [CrossRef]
- Téllez, T.R.; López, E.; Granado, G.L.; Pérez, E.A.; López, R.M.; Guzmán, J.M.S. The Water Hyacinth, Eichhornia Crassipes: An Invasive Plant in the Guadiana River Basin (Spain). Aquat. Invasions 2008, 3, 42–53. [Google Scholar] [CrossRef]
- Villamagna, A.M.; Murphy, B.R. Ecological and Socio-Economic Impacts of Invasive Water Hyacinth (Eichhornia Crassipes): A Review. Freshw. Biol. 2010, 55, 282–298. [Google Scholar] [CrossRef]
- Patel, S. Threats, Management and Envisaged Utilizations of Aquatic Weed Eichhornia Crassipes: An Overview. Rev. Environ. Sci. Biotechnol. 2012, 11, 249–259. [Google Scholar] [CrossRef]
- Stratoudakis, Y.; Correia, C.; Belo, A.F.; de Almeida, P.R. Improving Participated Management under Poor Fishers’ Organization: Anadromous Fishing in the Estuary of Mondego River, Portugal. Mar. Policy 2020, 119, 104049. [Google Scholar] [CrossRef]
- Datta, A.; Maharaj, S.; Prabhu, G.N.; Bhowmik, D.; Marino, A.; Akbari, V.; Rupavatharam, S.; Sujeetha, J.A.R.P.; Anantrao, G.G.; Poduvattil, V.K.; et al. Monitoring the Spread of Water Hyacinth (Pontederia Crassipes): Challenges and Future Developments. Front. Ecol. Evol. 2021, 9, 6. [Google Scholar] [CrossRef]
- Pádua, L.; Guimarães, N.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Effectiveness of Sentinel-2 in Multi-Temporal Post-Fire Monitoring When Compared with UAV Imagery. ISPRS Int. J. Geo-Inf. 2020, 9, 225. [Google Scholar] [CrossRef] [Green Version]
- Damtie, Y.A.; Mengistu, D.A.; Meshesha, D.T. Spatial Coverage of Water Hyacinth (Eichhornia Crassipes (Mart.) Solms) on Lake Tana and Associated Water Loss. Heliyon 2021, 7, e08196. [Google Scholar] [CrossRef] [PubMed]
- Mukarugwiro, J.; Newete, S.; Adam, E.; Nsanganwimana, F.; Abutaleb, K.; Byrne, M. Mapping Distribution of Water Hyacinth (Eichhornia Crassipes) in Rwanda Using Multispectral Remote Sensing Imagery. Afr. J. Aquat. Sci. 2019, 44, 339–348. [Google Scholar] [CrossRef]
- Dube, T.; Mutanga, O.; Sibanda, M.; Bangamwabo, V.; Shoko, C. Testing the Detection and Discrimination Potential of the New Landsat 8 Satellite Data on the Challenging Water Hyacinth (Eichhornia Crassipes) in Freshwater Ecosystems. Appl. Geogr. 2017, 84, 11–22. [Google Scholar] [CrossRef]
- Thamaga, K.H.; Dube, T. Remote Sensing of Invasive Water Hyacinth (Eichhornia Crassipes): A Review on Applications and Challenges. Remote Sens. Appl. Soc. Environ. 2018, 10, 36–46. [Google Scholar] [CrossRef]
- Ghoussein, Y.; Nicolas, H.; Haury, J.; Fadel, A.; Pichelin, P.; Abou Hamdan, H.; Faour, G. Multitemporal Remote Sensing Based on an FVC Reference Period Using Sentinel-2 for Monitoring Eichhornia Crassipes on a Mediterranean River. Remote Sens. 2019, 11, 1856. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Liao, C.; Li, J.; Sun, Q. Fractional Vegetation Cover Estimation in Arid and Semi-Arid Environments Using HJ-1 Satellite Hyperspectral Data. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 506–512. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Anker, Y.; Hershkovitz, Y.; Ben Dor, E.; Gasith, A. Application of Aerial Digital Photography for Macrophyte Cover and Composition Survey in Small Rural Streams. River Res. Appl. 2014, 30, 925–937. [Google Scholar] [CrossRef]
- MicaSense, Inc. The RedEdge-MX Sensor Data Sheet. Available online: https://micasense.com/wp-content/uploads/2019/11/Trifold-Dual-Camera-Product-Sheet.pdf (accessed on 12 December 2021).
- Benjamin, A.R.; Abd-Elrahman, A.; Gettys, L.A.; Hochmair, H.H.; Thayer, K. Monitoring the Efficacy of Crested Floatingheart (Nymphoides Cristata) Management with Object-Based Image Analysis of UAS Imagery. Remote Sens. 2021, 13, 830. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in The Great Plains with ERTS. In Third Earth Resources Technology Satellite-1 Symposium: Section A; Scientific and Technical Information Office, National Aeronautics and Space Administration: Washington, DC, USA, 1973; Volume 1, pp. 309–317. [Google Scholar]
- Xiaoqin, W.; Miaomiao, W.; Shaoqiang, W.; Yundong, W. Extraction of Vegetation Information from Visible Unmanned Aerial Vehicle Images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar]
- Gómez-Sapiens, M.; Schlatter, K.J.; Meléndez, Á.; Hernández-López, D.; Salazar, H.; Kendy, E.; Flessa, K.W. Improving the Efficiency and Accuracy of Evaluating Aridland Riparian Habitat Restoration Using Unmanned Aerial Vehicles. Remote Sens. Ecol. Conserv. 2021, 7, 488–503. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Riedmiller, M.; Braun, H. A Direct Adaptive Method for Faster Backpropagation Learning: The RPROP Algorithm. IEEE Int. Conf. Neural Netw. 1993, 1, 586–591. [Google Scholar]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [Green Version]
- Barsi, Á.; Kugler, Z.; László, I.; Szabó, G.; Abdulmutalib, H. Accuracy Dimensions in Remote Sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42. [Google Scholar] [CrossRef] [Green Version]
- Ling, C.; Liu, H.; Ju, H.; Zhang, H.; You, J.; Li, W. A Study on Spectral Signature Analysis of Wetland Vegetation Based on Ground Imaging Spectrum Data. J. Phys. Conf. Ser. 2017, 910, 012045. [Google Scholar] [CrossRef]
- Traganos, D.; Reinartz, P. Mapping Mediterranean Seagrasses with Sentinel-2 Imagery. Mar. Pollut. Bull. 2018, 134, 197–209. [Google Scholar] [CrossRef] [Green Version]
- Chabot, D.; Dillon, C.; Shemrock, A.; Weissflog, N.; Sager, E.P.S. An Object-Based Image Analysis Workflow for Monitoring Shallow-Water Aquatic Vegetation in Multispectral Drone Imagery. ISPRS Int. J. Geo-Inf. 2018, 7, 294. [Google Scholar] [CrossRef] [Green Version]
- Cunha, M.; Marques, J.; Azevedo, J.; Castilho, A. Understanding the Impact of a Major Hydro-Agricultural Project in Low Mondego Area (Portugal). Land 2021, 10, 114. [Google Scholar] [CrossRef]
- Marques, J.C.; Graça, M.A.; Pardal, M.Â. Aquatic Ecology of the Mondego River Basin Global Importance of Local Experience; Imprensa da Universidade de Coimbra: Coimbra, Portugal, 2002; pp. 7–12. ISBN 978-989-26-0336-0. [Google Scholar]
- Ramadhani, F.; Pullanagari, R.; Kereszturi, G.; Procter, J. Mapping of Rice Growth Phases and Bare Land Using Landsat-8 OLI with Machine Learning. Int. J. Remote Sens. 2020, 41, 8428–8452. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, Sensors, and Data Processing in Agroforestry: A Review towards Practical Applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Thamaga, K.H.; Dube, T. Testing Two Methods for Mapping Water Hyacinth (Eichhornia Crassipes) in the Greater Letaba River System, South Africa: Discrimination and Mapping Potential of the Polar-Orbiting Sentinel-2 MSI and Landsat 8 OLI Sensors. Int. J. Remote Sens. 2018, 39, 8041–8059. [Google Scholar] [CrossRef]
- Presidência do Conselho de Ministros. Resolução do Conselho de Ministros no 55/2018. Diário Da República: I Série No 8 2018, 1835–1880. Available online: https://dre.pt/dre/detalhe/resolucao-conselho-ministros/55-2018-115226936 (accessed on 30 December 2021).
- Lishawa, S.C.; Carson, B.D.; Brandt, J.S.; Tallant, J.M.; Reo, N.J.; Albert, D.A.; Monks, A.M.; Lautenbach, J.M.; Clark, E. Mechanical Harvesting Effectively Controls Young Typha Spp. Invasion and Unmanned Aerial Vehicle Data Enhances Post-Treatment Monitoring. Front. Plant Sci. 2017, 8, 619. [Google Scholar] [CrossRef]
- Samiappan, S.; Turnage, G.; Hathcock, L.; Casagrande, L.; Stinson, P.; Moorhead, R. Using Unmanned Aerial Vehicles for High-Resolution Remote Sensing to Map Invasive Phragmites Australis in Coastal Wetlands. Int. J. Remote Sens. 2017, 38, 2199–2217. [Google Scholar] [CrossRef]
- Government of Western Australia Drones Improve Invasive Weed Surveillance. Available online: https://www.agric.wa.gov.au/news/media-releases/drones-improve-invasive-weed-surveillance (accessed on 21 December 2021).
- Zaman, B.; Jensen, A.M.; McKee, M. Use of High-Resolution Multispectral Imagery Acquired with an Autonomous Unmanned Aerial Vehicle to Quantify the Spread of an Invasive Wetlands Species. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 803–806. [Google Scholar]
- Liu, M.; Yu, T.; Gu, X.; Sun, Z.; Yang, J.; Zhang, Z.; Mi, X.; Cao, W.; Li, J. The Impact of Spatial Resolution on the Classification of Vegetation Types in Highly Fragmented Planting Areas Based on Unmanned Aerial Vehicle Hyperspectral Images. Remote Sens. 2020, 12, 146. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Coordinates (Lat., Long.) | Altitude (m) | Start Time | Covered Area (ha) | Spatial Resolution (cm) | No. of Images (No. of Captures) |
|---|---|---|---|---|---|---|
| 1 | 40°8′55″ N 8°44′12″ W | 0 | 10:35 | 23.3 | 7.35 | 1955 (391) |
| 2 | 40°9′60″ N 8°44′17″ W | 2 | 11:29 | 10.6 | 7.25 | 1135 (227) |
| 3 | 40°9′38″ N 8°42′47″ W | 4 | 14:06 | 8.9 | 7.24 | 910 (182) |
| Classifier | UA | PA | K | OA |
|---|---|---|---|---|
| Unmanned aerial vehicle data | ||||
| RF | 0.93 | 0.96 | 0.88 | 0.94 |
| SVM | 0.83 | 0.93 | 0.74 | 0.87 |
| ANN | 0.87 | 0.96 | 0.82 | 0.91 |
| NB | 0.82 | 0.98 | 0.77 | 0.88 |
| KNN | 0.88 | 0.93 | 0.81 | 0.90 |
| Sentinel-2 data | ||||
| RF | 0.88 | 0.93 | 0.80 | 0.90 |
| SVM | 1.00 | 0.67 | 0.67 | 0.83 |
| ANN | 0.93 | 0.87 | 0.80 | 0.90 |
| NB | 1.00 | 0.73 | 0.73 | 0.87 |
| KNN | 0.92 | 0.80 | 0.73 | 0.87 |
| Study Area | Estimated Surface (m2) | Total Surface (m2) | ||
|---|---|---|---|---|
| 13 July 2021 | 21 July 2021 | 28 July 2021 | ||
| 1 | 5300 | 5524 | 6400 | 20,777 |
| 2 | 4100 | 5438 | 4700 | 18,790 |
| 3 | 3900 | 8699 | 8600 | 18,250 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pádua, L.; Antão-Geraldes, A.M.; Sousa, J.J.; Rodrigues, M.Â.; Oliveira, V.; Santos, D.; Miguens, M.F.P.; Castro, J.P. Water Hyacinth (Eichhornia crassipes) Detection Using Coarse and High Resolution Multispectral Data. Drones 2022, 6, 47. https://doi.org/10.3390/drones6020047
Pádua L, Antão-Geraldes AM, Sousa JJ, Rodrigues MÂ, Oliveira V, Santos D, Miguens MFP, Castro JP. Water Hyacinth (Eichhornia crassipes) Detection Using Coarse and High Resolution Multispectral Data. Drones. 2022; 6(2):47. https://doi.org/10.3390/drones6020047
Chicago/Turabian StylePádua, Luís, Ana M. Antão-Geraldes, Joaquim J. Sousa, Manuel Ângelo Rodrigues, Verónica Oliveira, Daniela Santos, Maria Filomena P. Miguens, and João Paulo Castro. 2022. "Water Hyacinth (Eichhornia crassipes) Detection Using Coarse and High Resolution Multispectral Data" Drones 6, no. 2: 47. https://doi.org/10.3390/drones6020047
APA StylePádua, L., Antão-Geraldes, A. M., Sousa, J. J., Rodrigues, M. Â., Oliveira, V., Santos, D., Miguens, M. F. P., & Castro, J. P. (2022). Water Hyacinth (Eichhornia crassipes) Detection Using Coarse and High Resolution Multispectral Data. Drones, 6(2), 47. https://doi.org/10.3390/drones6020047