
High-Density UAV-LiDAR in an Integrated Crop-Livestock-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD)

 ,
,  ,
,  ,
,  , ,
, ,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
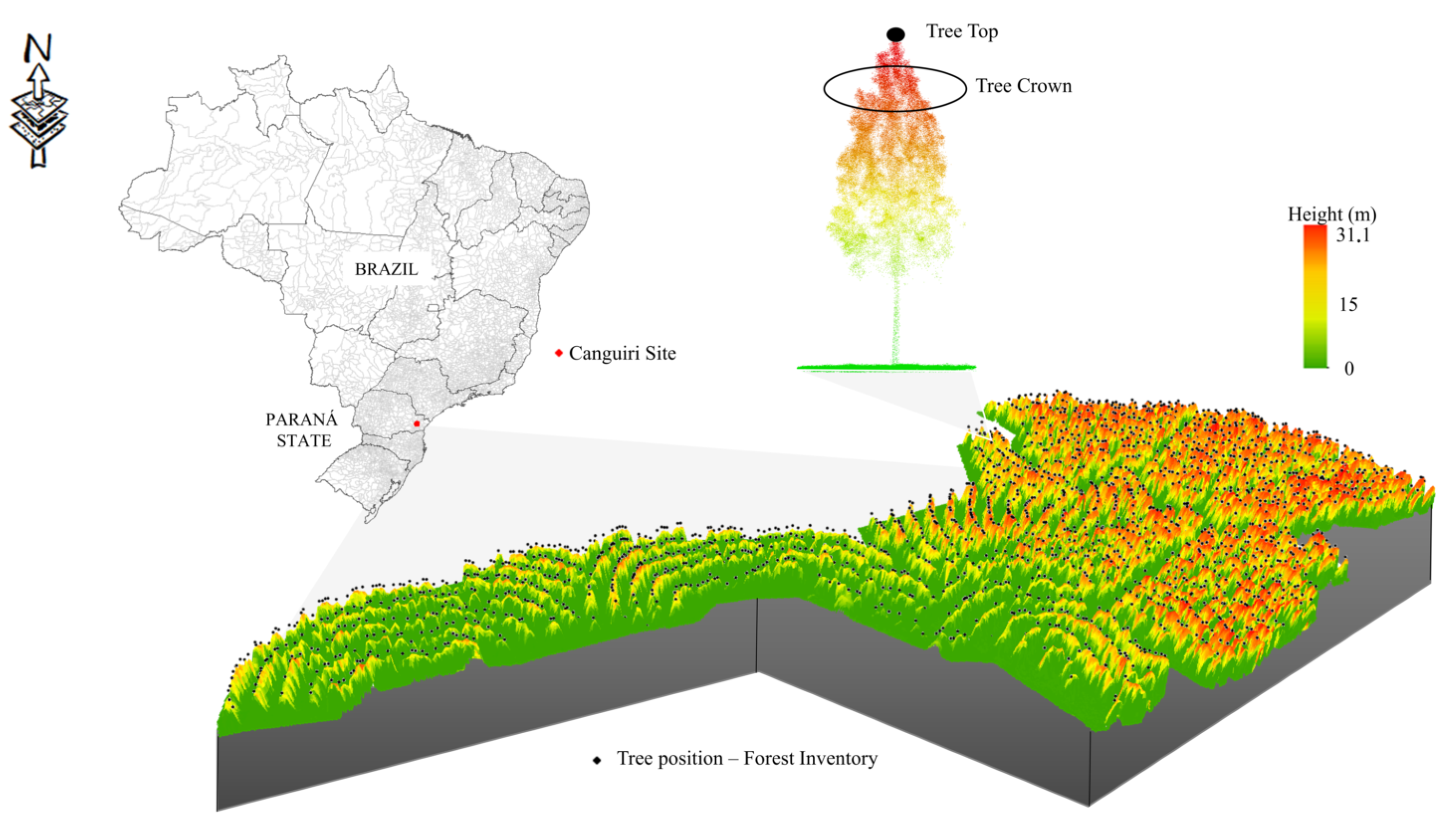
2.1. Study Area Description
2.2. UAV-LiDAR Data
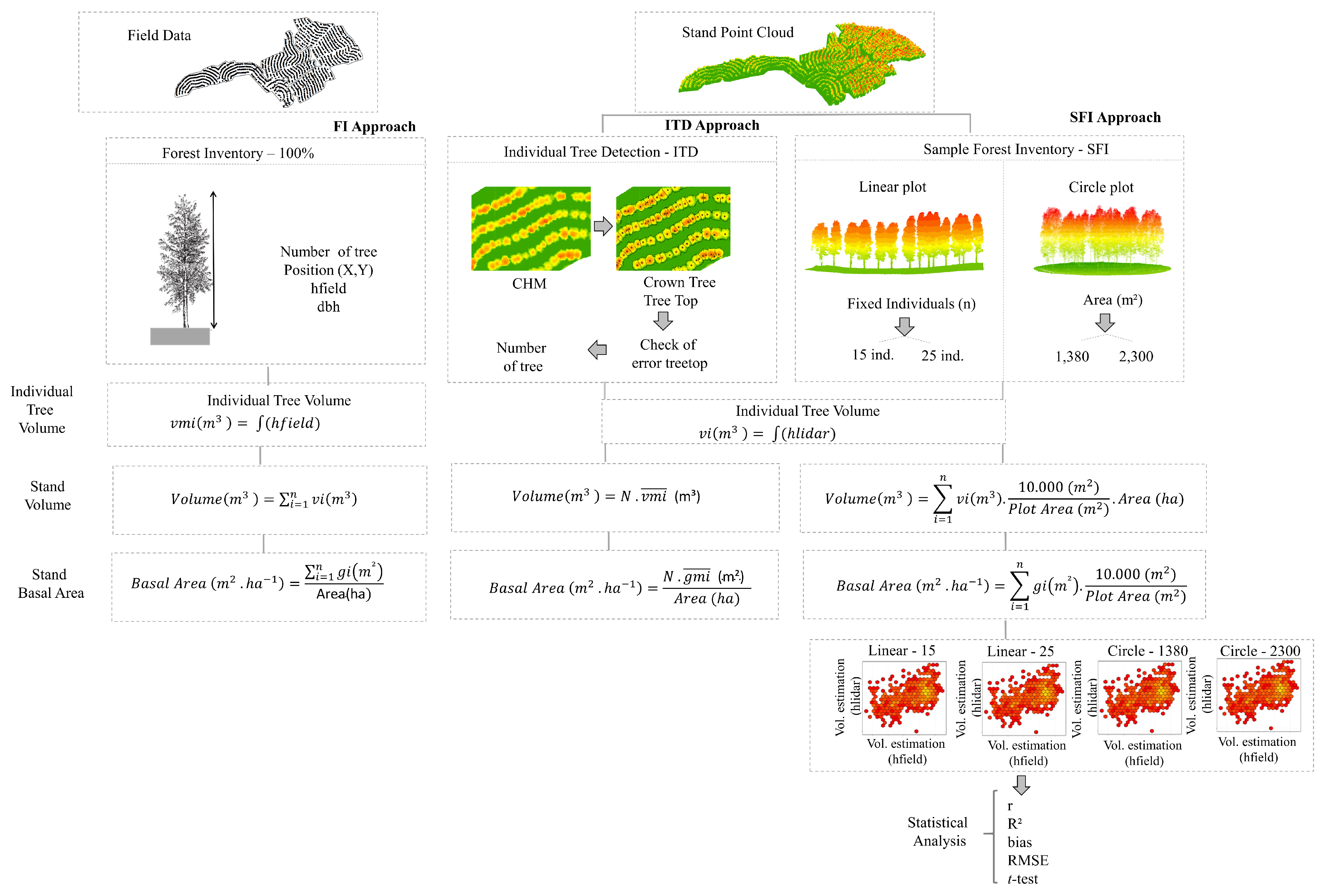
2.3. Methodological Approach
2.4. Forest Inventory Based on a Complete Census (FI)
Individual Tree Detection (ITD)
2.5. Sampling Forest Inventory (SFI)
2.6. Statistical Analysis and Comparisons
3. Results
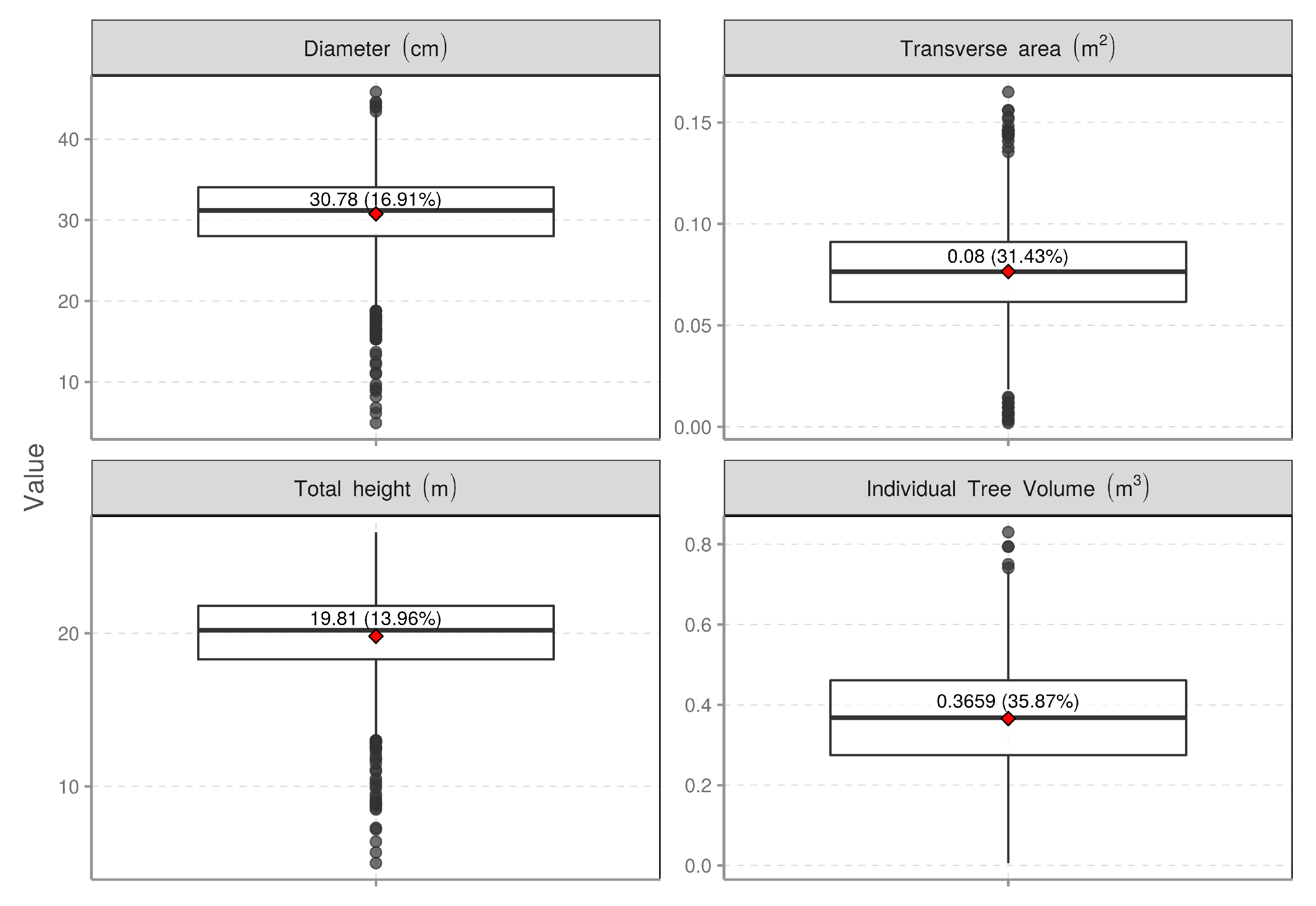
3.1. Exploratory Analysis at Stand-Level
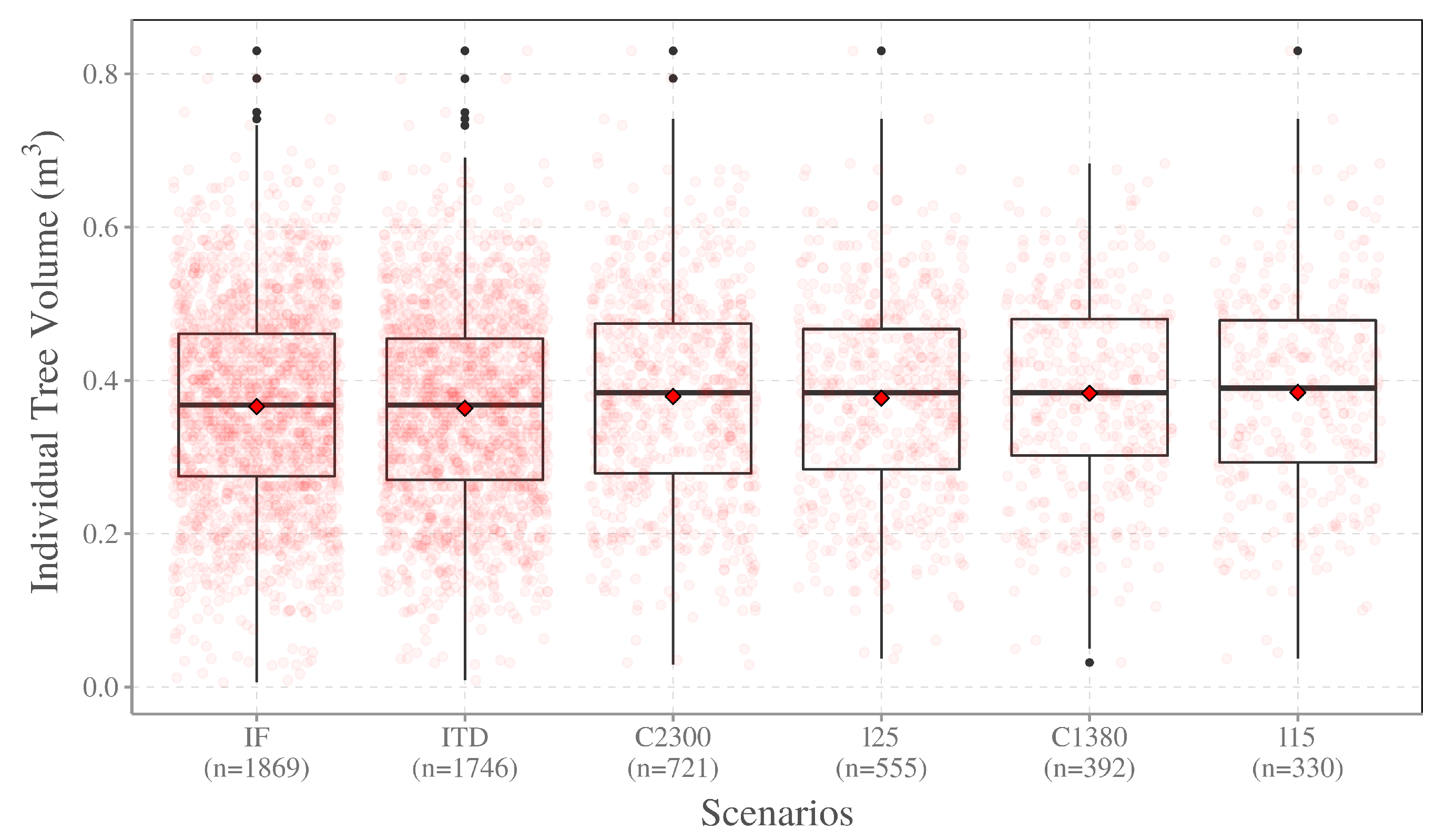
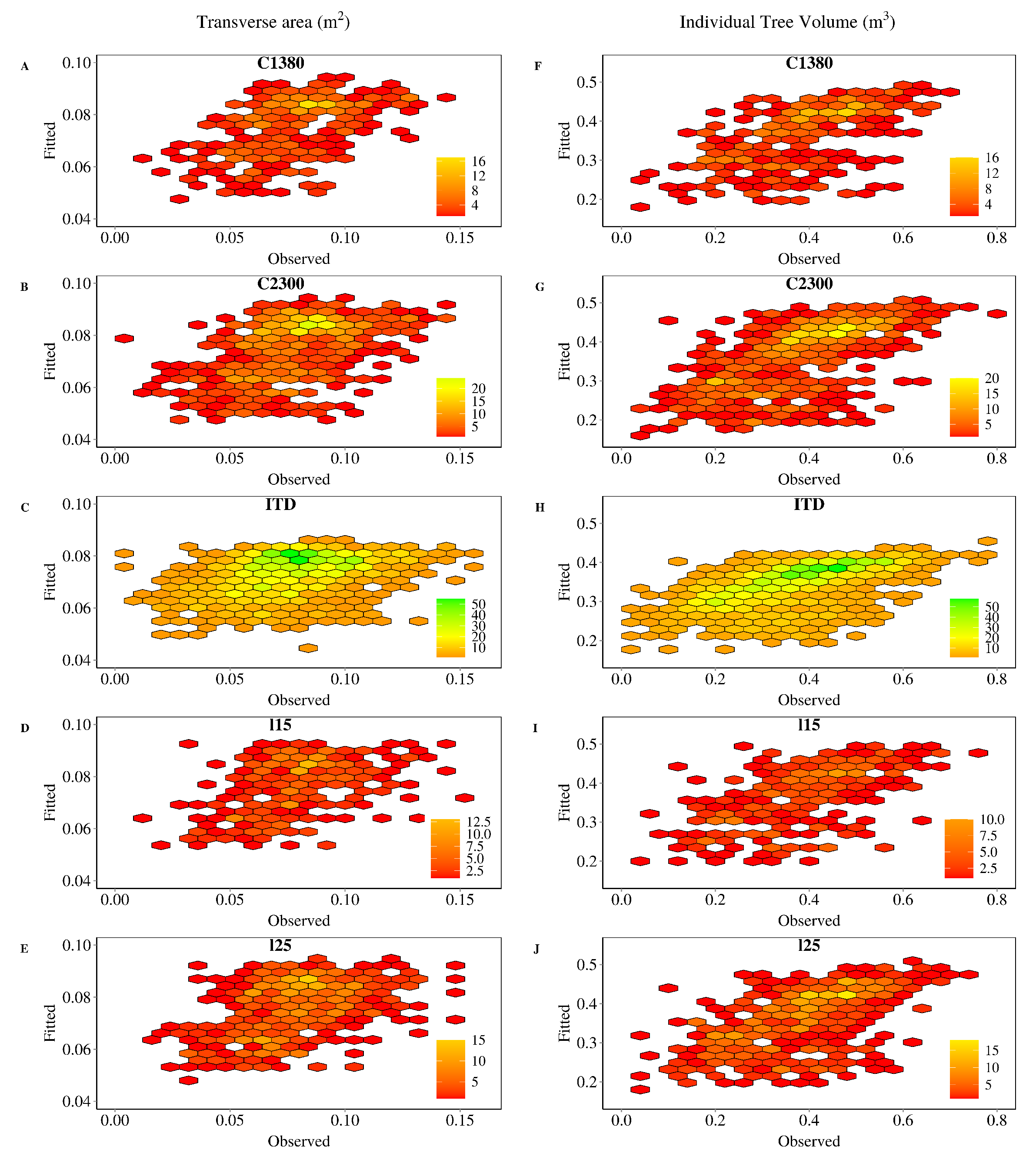
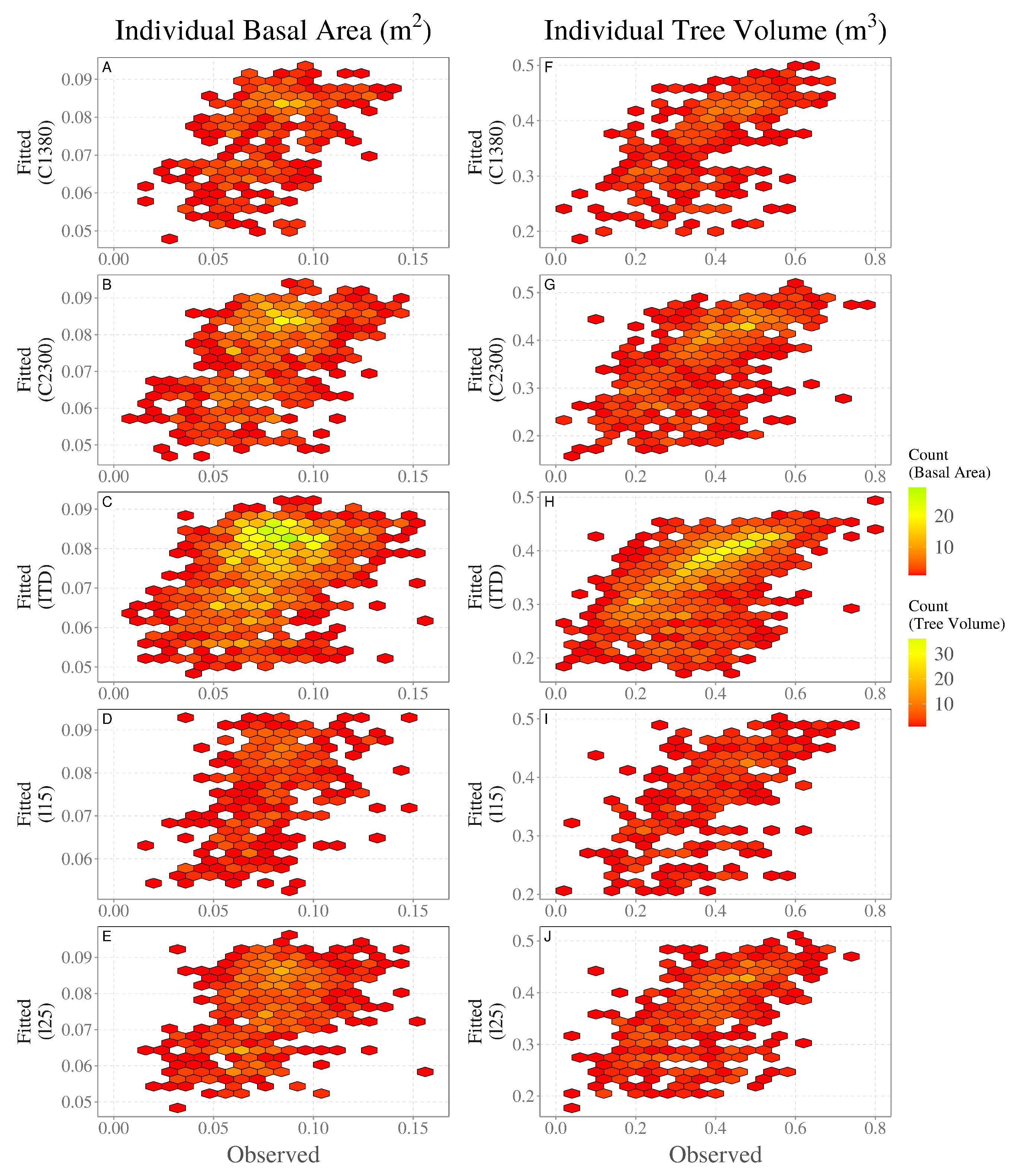
3.2. Individual Tree Volume Estimation in the Scenarios
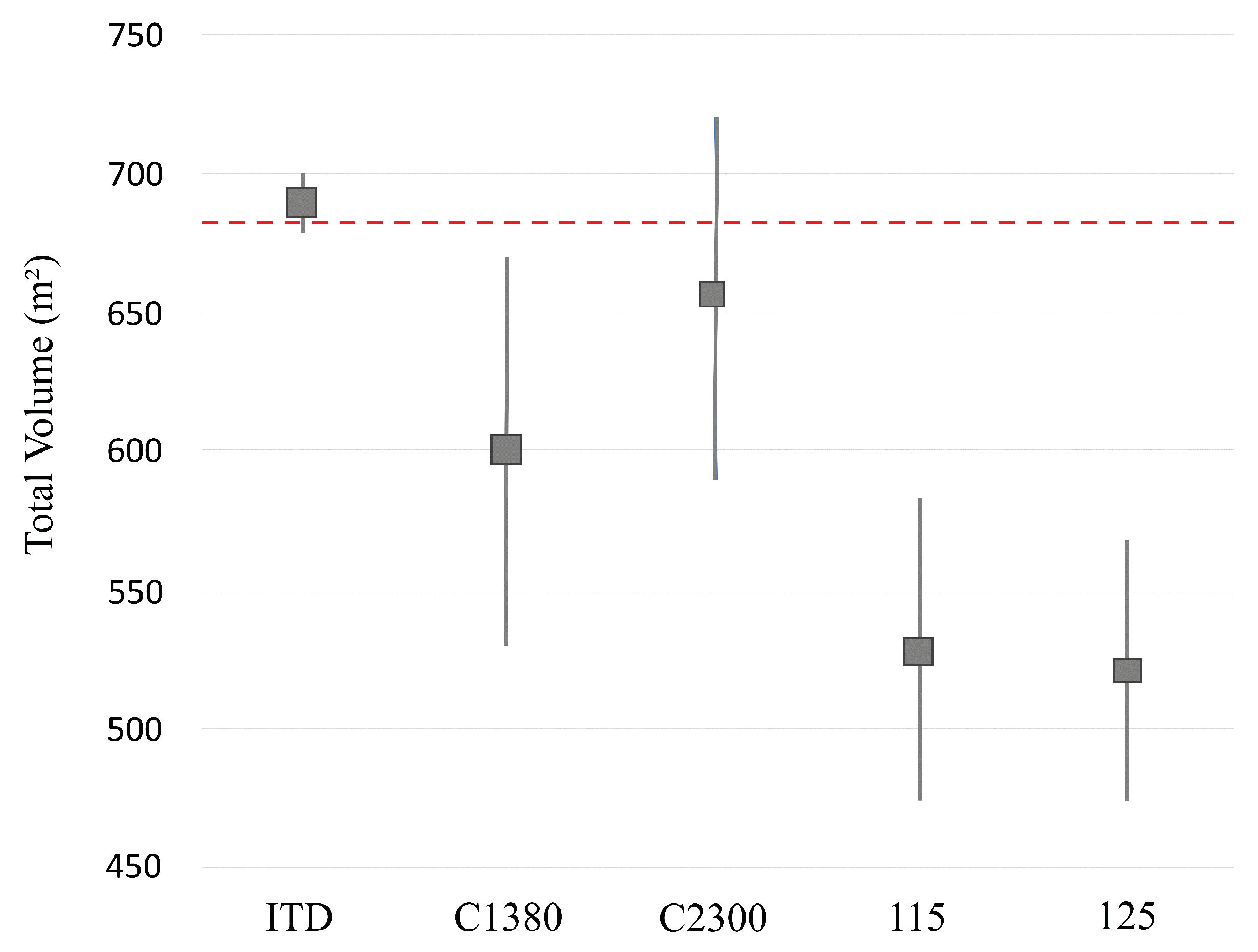
3.3. Estimates for the Forest Stand
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Payn, T.; Carnus, J.M.; Freer-Smith, P.; Kimberley, M.; Kollert, W.; Liu, S.; Orazio, C.; Rodriguez, L.; Silva, L.N.; Wingfield, M.J. Changes in planted forests and future global implications. For. Ecol. Manag. 2015, 352, 57–67. [Google Scholar] [CrossRef] [Green Version]
- Sanquetta, C.R.; Dalla Corte, A.P.; Pelissari, A.L.; Tomé, M.; Maas, G.C.B.; Sanquetta, M.N.I. Dynamics of carbon and CO2 removals by Brazilian forest plantations during 1990–2016. Carbon Balance Manag. 2018, 13, 20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Indústria Brasileira de Àrvores (IbÀ). Annual Report. 2020. Available online: https://iba.org/datafiles/publicacoes/relatorios/relatorio-iba-2020.pdf (accessed on 15 September 2020).
- Schmidt, L.N.; Sanquetta, M.N.I.; McTague, J.P.; da Silva, G.F.; Fraga Filho, C.V.; Sanquetta, C.R.; Scolforo, J.R.S. On the use of Weibull distribution in modeling and describing diameter distributions of clonal eucalypt stands. Can. J. For. Res. 2020, 50, 1050–1063. [Google Scholar] [CrossRef]
- Silverio, F.O.; Barbosa, L.C.A.; Silvestre, A.J.D.; Pilo-Veloso, D.; Gomide, J.L. Comparative Study On The Chemical Composition Of Lipophilic Fractions From Three Wood Tissues Of Eucalyptus Species By Gas Chromatography-Mass Spectrometry Analysis. J. Wood Sci. 2007, 53, 533–540. [Google Scholar] [CrossRef]
- Zago, L.M.S.; Ramalho, W.P.; Caramori, S. Does crop-livestock-forest systems contribute to soil quality in Brazilian Savannas? Floresta Ambiente 2019, 26, e20180343. [Google Scholar] [CrossRef]
- Tonini, H.; Wink, C.; Silva, A.G.M.F. Sampling alternatives for eucalyptus trees in integrated crop-livestock-forest system. Floresta Ambiente 2019, 26, e20170893. [Google Scholar] [CrossRef] [Green Version]
- Lafiti, H.; Heurich, M. Multi-scale remote sensing-assisted forest inventory: A glimpse of the state-of-the-art and future prospects. Remote. Sens. 2019, 11, 1260. [Google Scholar]
- Kangas, A. Model-based inference. In Forest Inventory, Methods and Applications. Managing Forest Ecosystems; Springer: Dordrect, The Netherlands, 2006; Chapter 3; Volume 10, pp. 39–52. [Google Scholar]
- White, J.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompaski, P. Remote sensing technologies for enhancing forest inventories: A review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef] [Green Version]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J. Mapping tropical forest carbon: Calibrating plot estimates to a simple LiDAR metric. Remote Sens. Environ. 2014, 140, 614–624. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne LiDAR system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef] [Green Version]
- Latifi, H.; Heurich, M.; Hartig, F.; Müller, J.; Krzystek, P.; Jehl, H.; Dech, S. Estimating over-and understorey canopy density of temperate mixed stands by airborne LiDAR data. For. Int. J. For. Res. 2016, 89, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Stefanoni, J.L.; Dupuy, J.M.; Johnson, K.D.; Birdsey, R.; Tun-Dzul, F.; Peduzzi, A.; López-Merlín, D. Improving species diversity and biomass estimates of tropical dry forests using airborne LiDAR. Remote Sens. 2014, 6, 4741–4763. [Google Scholar] [CrossRef] [Green Version]
- Rex, F.E.; Corte, A.P.D.; Machado, S.D.A.; Silva, C.A.; Sanquetta, C.R. Estimating Above-Ground Biomass of Araucaria angustifolia (Bertol.) Kuntze Using LiDAR Data. Floresta Ambiente 2019, 26. [Google Scholar] [CrossRef]
- Bayat, B.; van der Tol, C.; Yang, P.; Verhoef, W. Extending the SCOPE model to combine optical reflectance and soil moisture observations for remote sensing of ecosystem functioning under water stress conditions. Remote Sens. Environ. 2019, 221, 286–301. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV LiDAR and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Cunha Neto, E.M.; Rex, F.E.; Veras, H.F.P.; Moura, M.M.; Sanquetta, C.R.; Käfer, P.S.; Sanquetta, M.N.I.; Zambrano, A.M.A.; Broadbent, E.N.; Corte, A.P.D. Using high-density UAV-LiDAR for deriving tree height of Araucaria Angustifolia in an Urban Atlantic Rain Forest. Urban For. Urban Green. 2021, 63, 127197. [Google Scholar] [CrossRef]
- Shinzato, E.T.; Shimabukuro, Y.E.; Coops, N.C.; Tompalski, P.; Gasparoto, E.A. Integrating area-based and individual tree detection approaches for estimating tree volume in plantation inventory using aerial image and airborne laser scanning data. iFor. Biogeosci. 2017, 10, 296–302. [Google Scholar] [CrossRef] [Green Version]
- Picos, J.; Bastos, G.; Míguez, D.; Alonso, L.; Armesto, J. Individual tree detection in a eucalyptus plantation using unmanned aerial vehicle (UAV)-LiDAR. Remote Sens. 2020, 12, 885. [Google Scholar] [CrossRef] [Green Version]
- Jeronimo, S.M.A.; Kane, V.R.; Churchill, D.J.; McGaughey, R.J.; Franklin, J.F. Aplicando a detecção de árvores individuais LiDAR ao manejo de paisagens florestais estruturalmente diversas. J. For. 2018, 116, 336–346. [Google Scholar]
- Cosenza, D.N.; Soares, V.P.; Leite, H.G.; Gleriani, J.M.; Amaral, C.H.d.; GrippJúnior, J.; Silva, A.A.L.d.; Soares, P.; Tomé, M. Airborne laser scanning applied to eucalyptus stand inventory at individual tree level. Pesqui. Agropecu. 2018, 53, 1373–1382. [Google Scholar] [CrossRef]
- Zheng, W.; Chen, J.; Hao, Z.; Shi, J. Comparative analysis of the chloroplast genomic information of Cunninghamia lanceolata (Lamb.) Hook with sibling species from the Genera Cryptomeria D. Don, Taiwania Hayata, and Calocedrus Kurz. Int. J. Mol. Sci. 2016, 17, 1084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dalla Corte, A.P.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Mohan, M.; Silva, C.A.; Zambrano, A.A.; Prata, G.; de Almeida, D.R.A.; Trautenmüller, J.W.; et al. Forest inventory with high-density UAV-LiDAR: Machine learning approaches for predicting individual tree attributes. Comput. Electron. Agric. 2020, 179, 105815. [Google Scholar] [CrossRef]
- Empresa Brasileira de Pesquisa Agropecuária (EMBRAPA). Sistema Brasileiro de Classificação de Solos, 3rd ed.; Empresa Brasileira de Pesquisa Agropecuária: Brasília, Brazil, 2013; 353p. [Google Scholar]
- United States Department of Agriculture. Natural Resources Conservation Service. Keys to Soil Taxonomy, 11th ed.; United States Department of Agriculture: Washington, DC, USA, 2010; 346p. [Google Scholar]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; Gonçalves, J.L.M.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- Porfírio-da-Silva, V.; Medrado, M.J.S.; Nicodemo, M.L.F.; Dereti, R.M. Arborização de Pastagens com Espécies Florestais Madeiras: Implantação e Manejo; Embrapa Florestas: Colombo, Brasil, 2010; 48p. [Google Scholar]
- Dalla Corte, A.P.; Rex, F.E.; de Almeida, D.R.A.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; da Cunha Neto, E.M.; Veras, H.F.P.; et al. Measuring individual tree diameter and height using GatorEye high-density UAV-LiDAR in an integrated crop-livestock-forest system. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef] [Green Version]
- Broadbent, E.N.; Almeyda Zambrano, A.M.; Omans, G.; Adler, B.; Alonso, P.; Naylor, D.; Chenevert, G.; Murtha, T.; Prata, G.; de Almeida, D.R.A.; et al. The GatorEye Uninhabited Flying Laboratory: Sensor Fusion for 4D Ecological Analysis through Custom Hardware and Algorithm Integration. Available online: www.gatoreye.org (accessed on 5 May 2021).
- Isenburg, M. “LAStools—Efficient LiDAR Processing Software” (Version 1.8, Licensed). Available online: http://rapidlasso.com/LAStools (accessed on 11 November 2019).
- Roussel, J.-R.; Auty, D. Airborne LiDAR Data Manipulation and Visualization for Forestry Applications R Package Version 3.1.2. 2021. Available online: https://cran.r-project.org/package=lidR (accessed on 21 August 2021).
- Popescu, S.C.; Wynne, R.H. Seeing the trees in the forest. Photogramm. Eng. Remote Sens. 2013, 70, 589–604. [Google Scholar] [CrossRef] [Green Version]
- Kangas, A.; Maltamo, M. Forest Inventory, Methodology and Applications; Springer: Dordrect, The Netherlands, 2009; 362p. [Google Scholar]
- Kershaw, J.A.; Weiskittel, A.R.; Lavigne, M.B.; McGarrigle, E. An imputation/copula-based stochastic individual tree growth model for mixed species Acadian forests: A case study using the Nova Scotia permanent sample plot network. For. Ecosyst. 2017, 4, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Kvålseth, T.O. Cautionary note about R2. Am. Stat. 1985, 39, 279–285. [Google Scholar]
- Pretzsch, H. Forest dynamics, growth, and yield. In Forest Dynamics, Growth and Yield; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–39. [Google Scholar]
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: Chicago, IL, USA, 2013; 810p. [Google Scholar]
- Tanaka, S.; Takahashi, T.; Nishizono, T.; Kitahara, F.; Saito, H.; Iehara, T.; Awaya, Y. Stand volume estimation using the k-NN technique combined with forest inventory data, satellite image data and additional feature variables. Remote Sens. 2015, 7, 378–394. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Chen, W.; Sun, P.; Zhao, X.; Ma, Z. Prediction of protein solvent accessibility using PSO-SVR with multiple sequence-derived features and weighted sliding window scheme. BioData Min. 2015, 8, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Silva, V.S.D.; Silva, C.A.; Mohan, M.; Cardil, A.; Rex, F.E.; Loureiro, G.H.; Klauberg, C. Combined impact of sample size and modeling approaches for predicting stem volume in eucalyptus spp. forest plantations using field and LiDAR data. An. Acad. Bras. Ciênc. 2020, 12, 1438. [Google Scholar]
- Martínez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A. Automatic forest-fire measuring using ground stations and unmanned aerial systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2424. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Liesenberg, V.; Carvalho, S.P.E.; Rodriguez, L.C. A principal component approach for predicting the stem volume in Eucalyptus plantations in Brazil using airborne LiDAR data. For. Int. J. For. Res. 2016, 89, 422–433. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. Meteorol. Z. 2012, 22, 711–728. [Google Scholar] [CrossRef]
- Jevšenak, J.; Skudnik, M. A random forest model for basal area increment predictions from national forest inventory data. For. Ecol. Manag. 2021, 479, 118601. [Google Scholar] [CrossRef]
- Hou, Z.; Mehtätalo, L.; McRoberts, R.E.; Ståhl, G.; Tokola, T.; Rana, P.; Siipilehto, J.; Xu, Q. Remote sensing-assisted data assimilation and simultaneous inference for forest inventory. Remote Sens. Environ. 2019, 234, 111431. [Google Scholar] [CrossRef]
- Maltamo, M.; Mehtätalo, L.; Vauhkonen, J.; Packalén, P. Predicting and calibrating tree attributes by means of airborne laser scanning and field measurements. Can. J. For. 2012, 42, 1896–1907. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef] [Green Version]
- Goerndt, M.E.; Monleon, V.J.; Temesgen, H. Relating forest attributes with area- and tree-based light detection and ranging metrics for Western Oregon. West. J. Appl. For. 2010, 25, 105–111. [Google Scholar] [CrossRef] [Green Version]
- Véga, C.; Durrieu, S. Multi-level filtering segmentation to measure individual tree parameters based on LiDAR data: Application to a mountainous forest with heterogeneous stands. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 646–656. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Scenario | R2 | Syx | Syx% | RMSE | RMSE% | Bias | Bias% | r | x2 | AIC | n |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Transverse area | C1380 | 0.2433 | 0.0088 | 11.2158 | 0.0191 | 24.4770 | 0.0025 | 3.2397 | 0.4932 | 2.1181 | 2722.76 | 392 |
| C2300 | 0.2356 | 0.0126 | 16.1565 | 0.0202 | 25.9988 | 0.0030 | 3.8794 | 0.4854 | 6.1981 | 5103.52 | 721 | |
| ITD | 0.1418 | 0.0218 | 28.3185 | 0.0225 | 29.2833 | 0.0038 | 4.9757 | 0.3766 | 17.2681 | −2758.33 | 1746 | |
| l15 | 0.1935 | 0.0084 | 10.5888 | 0.0199 | 25.1861 | 0.0025 | 3.2069 | 0.4398 | 1.8080 | 2283.539 | 330 | |
| l25 | 0.1850 | 0.0113 | 14.4168 | 0.0208 | 26.4420 | 0.0028 | 3.5814 | 0.4301 | 3.3561 | 3835.496 | 555 | |
| Volume | C1380 | 0.3614 | 0.0465 | 12.1434 | 0.1016 | 26.5015 | 0.0164 | 4.2665 | 0.6012 | 13.9608 | −674.585 | 392 |
| C2300 | 0.4156 | 0.0641 | 16.8959 | 0.1031 | 27.1886 | 0.0169 | 4.4693 | 0.6447 | 26.5454 | −1224.52 | 721 | |
| ITD | 0.3142 | 0.1060 | 29.1596 | 0.1096 | 30.1530 | 0.0217 | 5.9776 | 0.5605 | 84.9910 | 937.2128 | 1746 | |
| l15 | 0.3479 | 0.0461 | 11.9887 | 0.1096 | 28.5159 | 0.0189 | 4.9288 | 0.5899 | 14.5701 | −516,812 | 330 | |
| l25 | 0.3390 | 0.0577 | 15.3074 | 0.1058 | 28.0754 | 0.0177 | 4.7079 | 0.5822 | 22.0331 | −912.18 | 555 |
| Scenarios | ||||||
|---|---|---|---|---|---|---|
| Variable | Statistc | ITD | C1380 | C2300 | l15 | l25 |
| * Number 113 n ha−1 | x(n ha−1) | 106 | 95 | 104 | 83 | 84 |
| 1869 | X(n) | 1746 | 1566 | 1728 | 1371 | 1383 |
| * Basal area | x (m2 ha−1) | 8.13 | 7.40 | 8.14 | 6.54 | 6.57 |
| IF 8.65 m2 ha−1 | CI lower (m2 ha−1) | 8.01 | 6.78 | 7.60 | 6.04 | 6.16 |
| CI upper (m2 ha−1) | 8.25 | 8.01 | 8.68 | 7.04 | 6.98 | |
| * Volume | x (m3 ha−1) | 41.67 | 36.29 | 39.62 | 31.84 | 31.51 |
| IF 41.34 m3 ha−1 | CI lower (m3 ha−1) | 40.98 | 32.06 | 35.67 | 28.42 | 28.66 |
| 686.88 m3 | CI upper (m3 ha−1) | 42.36 | 40.52 | 43.56 | 35.27 | 34.36 |
| X (m3) | 689.29 | 600.21 | 655.23 | 526.71 | 521.24 | |
| CI lower (m3) | 677.87 | 530.22 | 589.97 | 470.12 | 583.29 | |
| CI upper (m3) | 700.71 | 670.21 | 720.50 | 474.10 | 568.38 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Corte, A.P.D.; da Cunha Neto, E.M.; Rex, F.E.; Souza, D.; Behling, A.; Mohan, M.; Sanquetta, M.N.I.; Silva, C.A.; Klauberg, C.; Sanquetta, C.R.; et al. High-Density UAV-LiDAR in an Integrated Crop-Livestock-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD). Drones 2022, 6, 48. https://doi.org/10.3390/drones6020048
Corte APD, da Cunha Neto EM, Rex FE, Souza D, Behling A, Mohan M, Sanquetta MNI, Silva CA, Klauberg C, Sanquetta CR, et al. High-Density UAV-LiDAR in an Integrated Crop-Livestock-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD). Drones. 2022; 6(2):48. https://doi.org/10.3390/drones6020048
Chicago/Turabian StyleCorte, Ana Paula Dalla, Ernandes M. da Cunha Neto, Franciel Eduardo Rex, Deivison Souza, Alexandre Behling, Midhun Mohan, Mateus Niroh Inoue Sanquetta, Carlos Alberto Silva, Carine Klauberg, Carlos Roberto Sanquetta, and et al. 2022. "High-Density UAV-LiDAR in an Integrated Crop-Livestock-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD)" Drones 6, no. 2: 48. https://doi.org/10.3390/drones6020048
APA StyleCorte, A. P. D., da Cunha Neto, E. M., Rex, F. E., Souza, D., Behling, A., Mohan, M., Sanquetta, M. N. I., Silva, C. A., Klauberg, C., Sanquetta, C. R., Veras, H. F. P., de Almeida, D. R. A., Prata, G., Zambrano, A. M. A., Trautenmüller, J. W., de Moraes, A., Karasinski, M. A., & Broadbent, E. N. (2022). High-Density UAV-LiDAR in an Integrated Crop-Livestock-Forest System: Sampling Forest Inventory or Forest Inventory Based on Individual Tree Detection (ITD). Drones, 6(2), 48. https://doi.org/10.3390/drones6020048