
Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase



Abstract
:1. Introduction
2. Transition Corridor of the 3BSD Nozzle
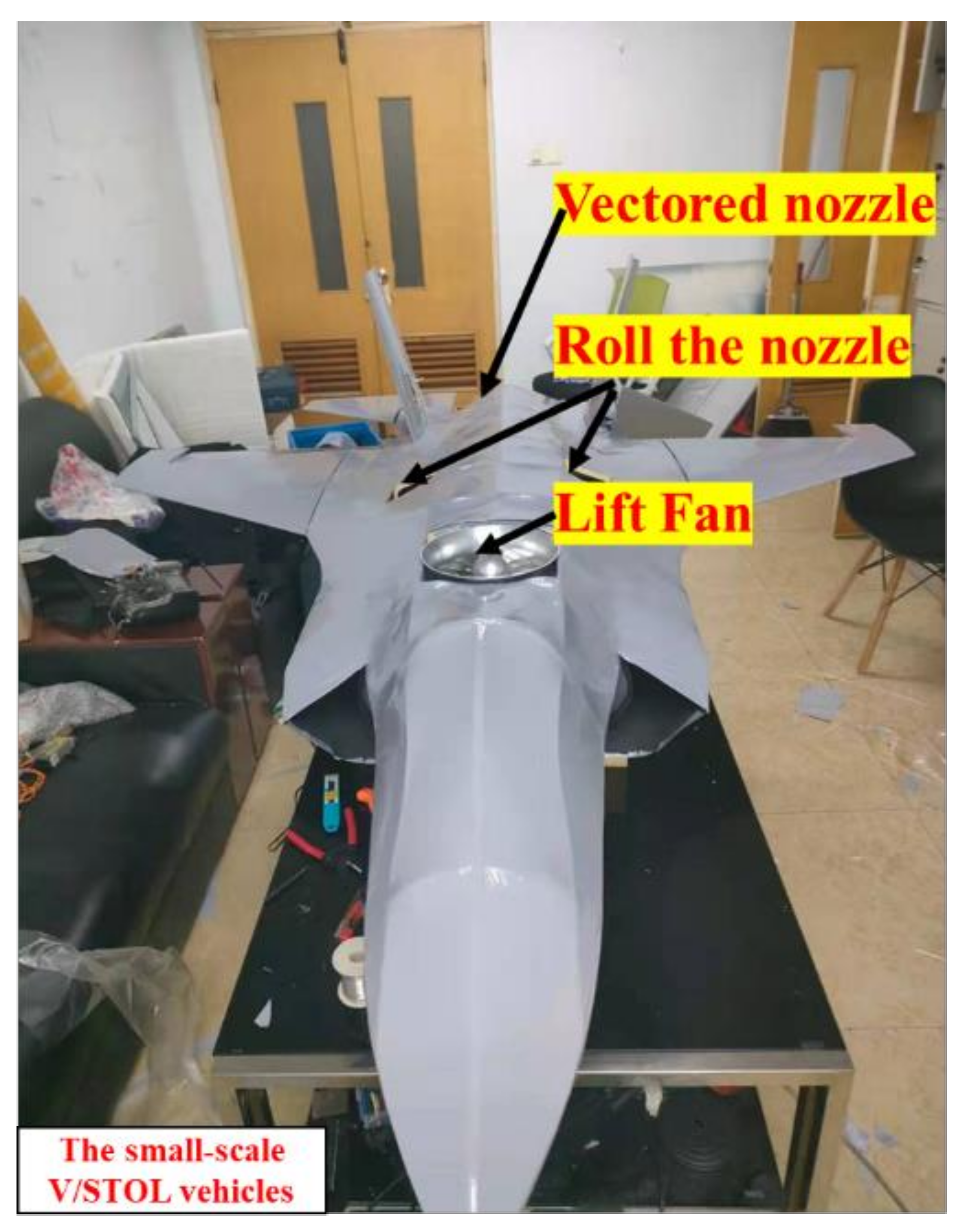
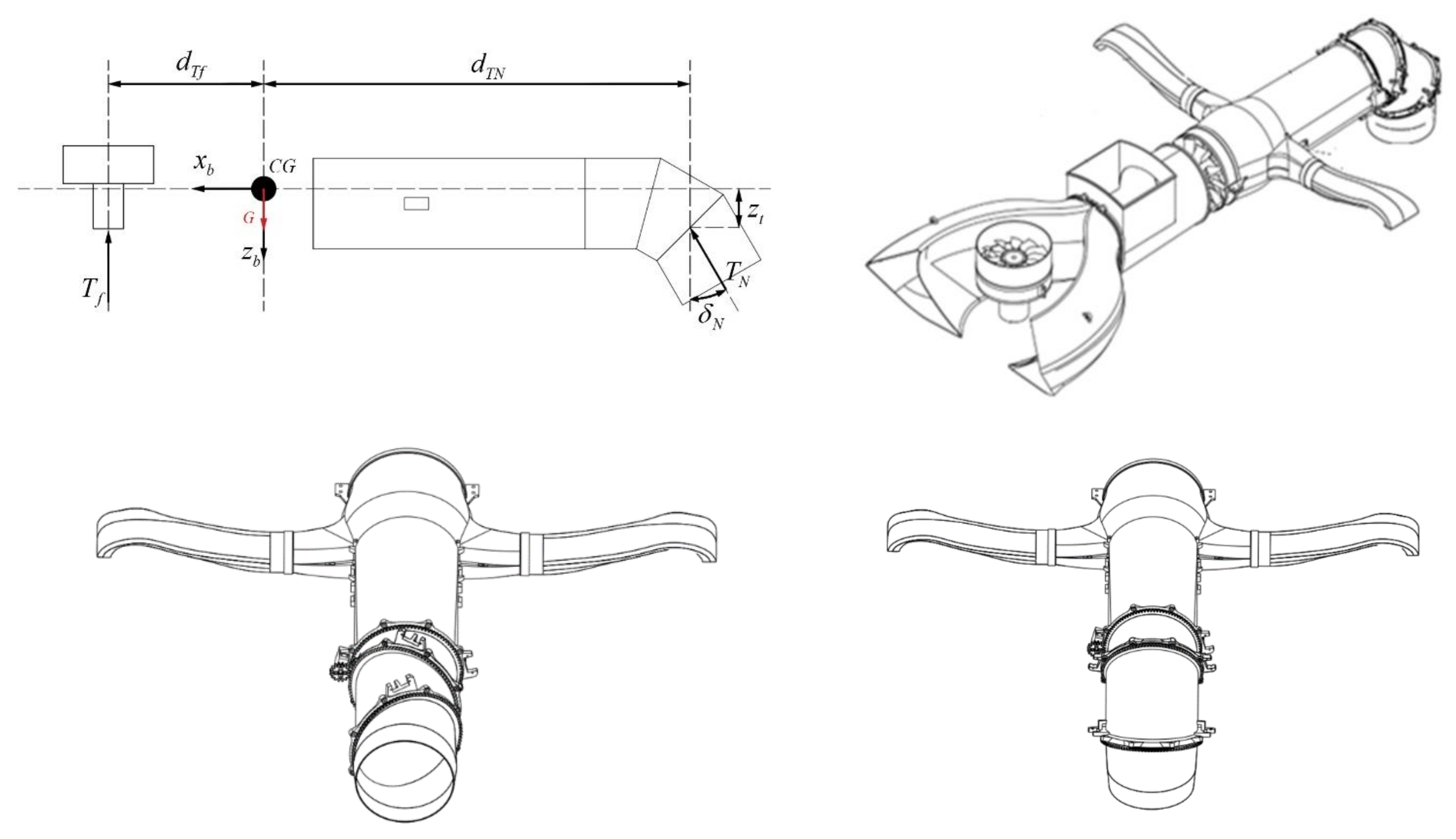
2.1. The Propulsion System Model
2.2. The Jet Stream Effect
2.3. Longitudinal Dynamic Model
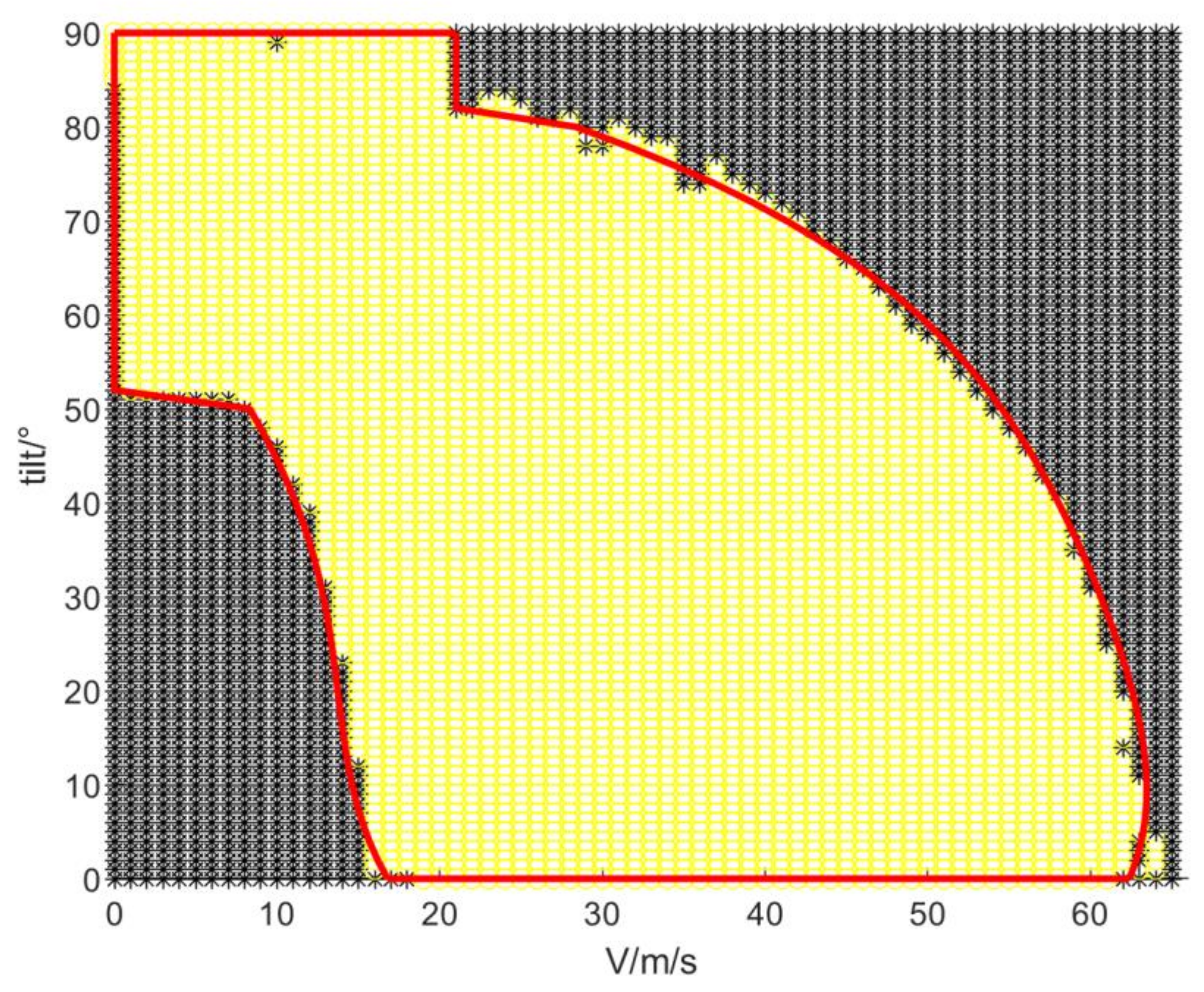
2.4. Transition Corridor
- Step 1: Initialize the model parameters, calculation conditions and constraint states.
- Step 2: Trim the model and save the results.
- Step 3: Change the trimming velocity and tilt angle of the 3BSD nozzle and repeat Step 2.
- Step 4: Plot the trimming results.
- Step 5: Remove the trimming points that have excessive flight path angles.
3. Control Strategy
3.1. Control Principles
3.2. Control Allocation
3.3. Control Strategy Optimization
- Input variables
- 2.
- Boundary conditions
- 3.
- Trajectory constraints
- 4.
- Cost function
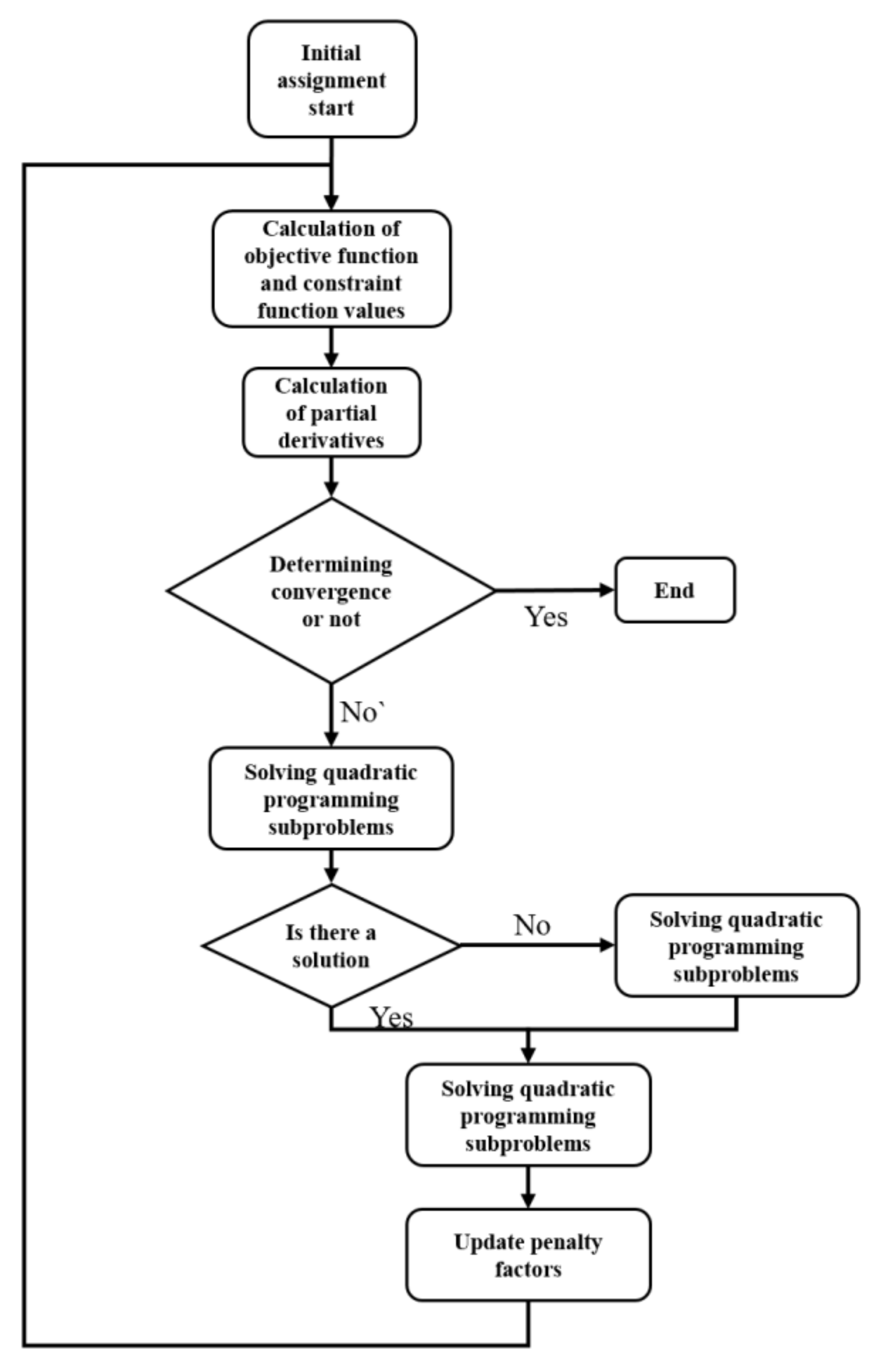
3.4. Numerical Optimization Method
3.4.1. Nondimensionalization Method
3.4.2. Transformation Method
4. Optimization Results
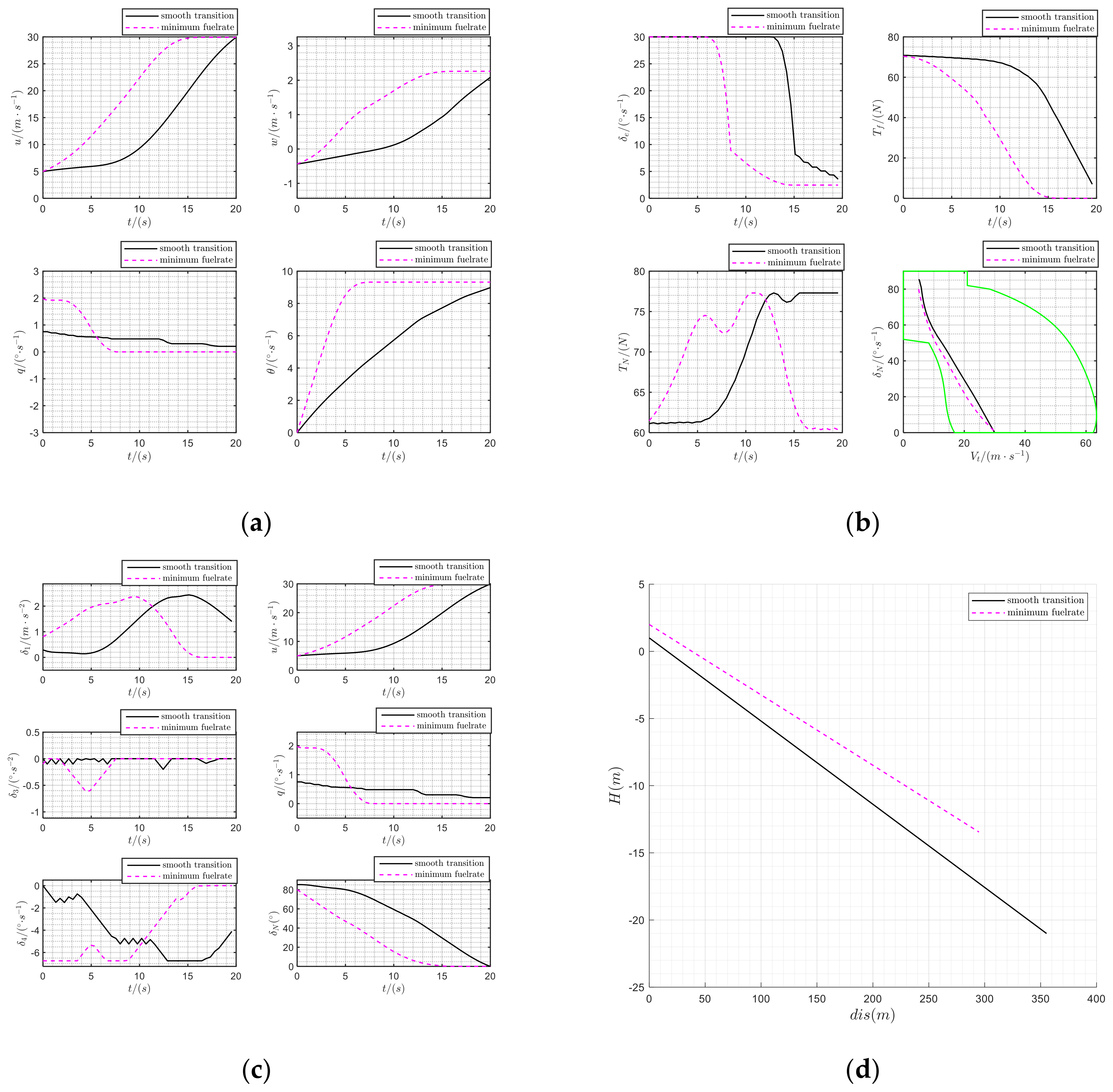
4.1. Transition in Take-Off
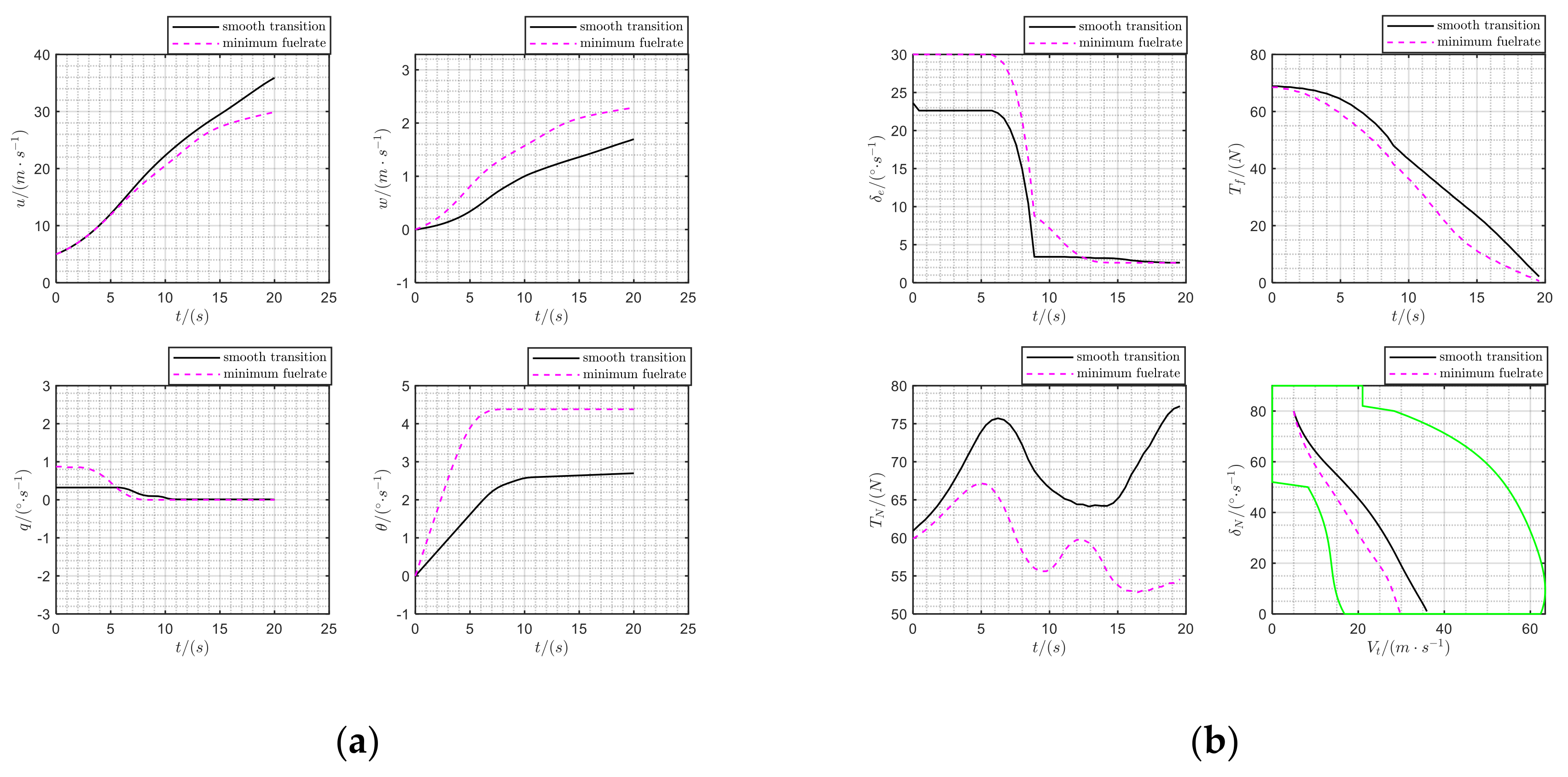
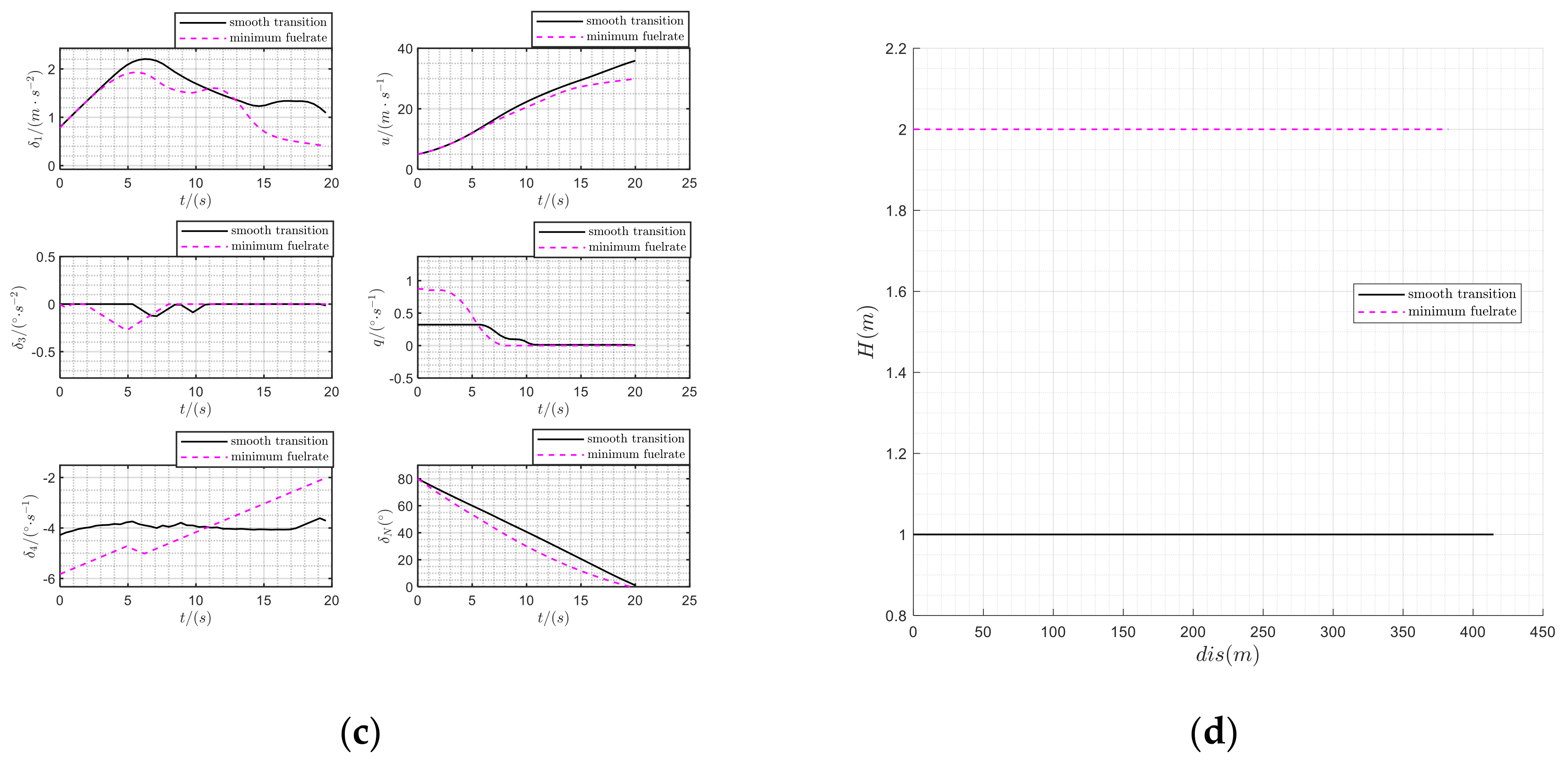
4.2. Transition in Landing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jet-Induced Effects. The Aerodynamics of Jet-and Fan-Powered V/STOL Aircraft in Hover and Transition. Available online: http://library.oum.edu.my/oumlib/node/720068 (accessed on 11 April 2022).
- Franklin, J.A. Revised Simulation Model of the Control System, Displays, and Propulsion System for an ASTOVL Lift Fan Aircraft; NASA-TM-112208; NASA: Washington, DC, USA, 1997; pp. 1–70.
- Bordignon, K.; Bessolo, J. Control allocation for the X-35B. In Proceedings of the 2002 Biennial International Powered Lift Conference and Exhibit, Williamsburg, VA, USA, 5–7 November 2002. [Google Scholar]
- Hwang, S.J.; Kim, Y.S.; Lee, M.K. Tilt rotor-wing concept for multi-purpose VTOL UAV. Int. J. Aeronaut. Space Sci. 2007, 8, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Choi, S.; Kang, Y.; Chang, S.; Koo, S.; Kim, J.M. Development and conversion flight test of a small tiltrotor unmanned aerial vehicle. J. Aircr. 2010, 47, 730–735. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, X.; Hu, Z.; Zhang, K. Nonlinear modeling and transition corridor calculation of a tiltrotor without cyclic pitch. In MATEC Web of Conferences, Proceedings of the ICPCM2021, Xiamen, China, 29–30 December 2021; EDP Sciences: Les Ulis, France, 2022. [Google Scholar]
- Tol, H.J.; de Visser, C.C.; van Kampen, E.-J.; Chu, Q.P. Nonlinear Multivariate Spline-Based Control Allocation for High-Performance Aircraft. J. Guid. Control Dyn. 2014, 37, 1840–1862. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; He, Y.; Li, X.; Zhu, J. Simulation testing method of V/STOL flight control strategy. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012. [Google Scholar]
- Denham, J.; Paines, J. Converging on a Precision Hover Control Strategy for the F-35B STOVL Aircraft. In AIAA Guidance, Proceedings of the Navigation & Control Conference & Exhibit, Honolulu, HI, USA, 18–21 August 2008; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2008. [Google Scholar]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control. Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Jorris, T.R.; Cobb, R.G. Three-Dimensional Trajectory Optimization Satisfying Waypoint and No-Fly Zone Constraints. J. Guid. Control Dyn. 2008, 31, 543–553. [Google Scholar] [CrossRef]
- Lee, S.; Bang, H. Three-Dimensional Ascent Trajectory Optimization for Stratospheric Airship Platforms in the Jet Stream. J. Guid. Control Dyn. 2007, 30, 1341–1351. [Google Scholar] [CrossRef]
- Dragan, A.D.; Ratliff, N.D.; Srinivasa, S.S. Manipulation planning with goal sets using constrained trajectory optimization. In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai China, 15 August 2011. [Google Scholar]
- Hughes, S.P.; Mailhe, L.M.; Guzman, J.J. A Comparison of Trajectory Optimization Methods for the Impulsive Minimum Fuel Rendezvous Problem. In Proceedings of the 26th Annual Guidance and Control Conference, Breckenridge, CO, USA, 5–9 February 2003. [Google Scholar]
- Miele, A.; Wang, T.; Basapur, V. Primal and dual formulations of sequential gradient-restoration algorithms for trajectory optimization problems. Acta Astronaut. 1986, 13, 491–505. [Google Scholar] [CrossRef]
- Rysdyk, R.T.; Calise, A.J. Adaptive model inversion flight control for tilt—Rotor aircraft. J. Guid. Control Dyn. 1999, 22, 402–407. [Google Scholar] [CrossRef] [Green Version]
- Brick, S.; Fischer, D. CV-22 osprey flight path cueing flight director system. In Proceedings of the AHS Annual Forum Proceedings, Washington, DC, USA, 20–22 May 1998; AHS International: Fairfax, VA, USA, 1998. [Google Scholar]
- Klein, P.D.; Nicks, C.O. Flight director and approach profile development for civil tihrotor terminal area operations. In Proceedings of the AHS 54th International Annual Forum, Washington, DC, USA, 20–22 May 1998; AHS International: Fairfax, VA, USA, 1998. [Google Scholar]
- Calise, A.J.; Rysdyk, R. Research in Nonlinear Flight Control for Tihrotor Aircraft Operating in the Terminal Area; NASA CR-203112; NASA: Washington, DC, USA, 1996.
- Marr, R.L.; Roderick, W.E.B. Handling qualities evaluation of the XV-1 5 tilt rotor aircraft. J. Am. Helicopter Soc. 1975, 20, 23–33. [Google Scholar] [CrossRef]
- Pu, H.Z.; Zhen, Z.Y.; Gao, C. Tiltrotor aircraft attitude control in conversion mode based on optimal preview control Guidance. In Proceedings of the Navigation and Control Conference, Yantai, China, 8–10 August 2014. [Google Scholar]
- Bottasso, C.L.; Croce, A.; Leonello, D.; Riviello, L. Optimization of critical trajectories for rotorcraft vehicles. J. Am. Helicopter Soc. 2005, 50, 165–177. [Google Scholar] [CrossRef]
- Jhemi, A.A.; Carlson, E.B.; Zhao, Y.J.; Chen, R.T. Optimization of rotorcraft flight following engine failure. J. Am. Helicopter Soc. 2004, 49, 117–126. [Google Scholar]
- Carlson, E.B.; Zhao, Y.J. Optimal city-center takeoff operation of tiltrotor aircraft in one engine failure. J. Aerosp. Eng. 2004, 17, 26–39. [Google Scholar]
- Birckelbaw, L.G.; Mcneil, W.E.; Wardwell, D.A. Aerodynamics model for a generic ASTOVL lift-fan aircraft. NASA Tech. Rep. 1995, 124, 109–125. [Google Scholar]
- Smith, B.E.; Pppen, W.A.; Lye, J.D. Propulsion-induced aerodynamic effects measured with a full-scale stovl model. J. Aircr. 2015, 31, 306–313. [Google Scholar] [CrossRef]
- Thondiyath, A. Design, analysis, and testing of a hybrid vtol tilt-rotor uav for increased endurance. Sensors 2021, 21, 5987. [Google Scholar]
- Saddington, A.J.; Knowles, K. A review of out-of-ground-effect propulsion-induced interference on stovl aircraft. Prog. Aerosp. Sci. 2005, 41, 175–191. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 0.476 m | |
| 0.561 m | |
| 0.1 m |
| Parameters | Values |
|---|---|
| 13 kg | |
| 0.88 m2 | |
| 1.53 m | |
| 1.055 kg/m3 |
| Actuators | Max Value |
|---|---|
| [−35°, 35°] | |
| [0, 80 N] | |
| [0, 80 N] | |
| [0, 90°] |
| Stick | Longitude | The z-axis velocity | Pitch acceleration () | elevator |
| Lateral | The y-axis velocity | Roll speed | aileron | |
| The throttle lever | The x-axis velocity | The x-axis acceleration () | 3BSD nozzle thrust | |
| Pedal | The z-axis angular rates | Rudder | Rudder | |
| Roller | 3BSD nozzle tilt angular rates () | |||
| Parameters | Values |
|---|---|
| 25 | |
| [−0.5, −0.1, −0.5, −0.5] | |
| [−0.1, −0.1, −0.1, −0.8] | |
| [−0.1, −0.1, −0.1, −0.1] | |
| 46 | |
| [0.5, 0.1, 0.5,0.5] | |
| [0.1, 0.1, 0.1, 0.8] | |
| [0.1, 0.1, 0.1, 0.1] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Z.; Mao, S.; Wang, Z.; Zhou, Z.; Yang, C.; Li, Z. Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones 2022, 6, 129. https://doi.org/10.3390/drones6050129
Gong Z, Mao S, Wang Z, Zhou Z, Yang C, Li Z. Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones. 2022; 6(5):129. https://doi.org/10.3390/drones6050129
Chicago/Turabian StyleGong, Zheng, Shengcheng Mao, Zian Wang, Zan Zhou, Chengchuan Yang, and Zhengxue Li. 2022. "Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase" Drones 6, no. 5: 129. https://doi.org/10.3390/drones6050129
APA StyleGong, Z., Mao, S., Wang, Z., Zhou, Z., Yang, C., & Li, Z. (2022). Control Optimization of Small-Scale Thrust-Vectoring Vertical/Short Take-Off and Landing Vehicles in Transition Phase. Drones, 6(5), 129. https://doi.org/10.3390/drones6050129