
Phoenix: Aerial Monitoring for Fighting Wildfires


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction

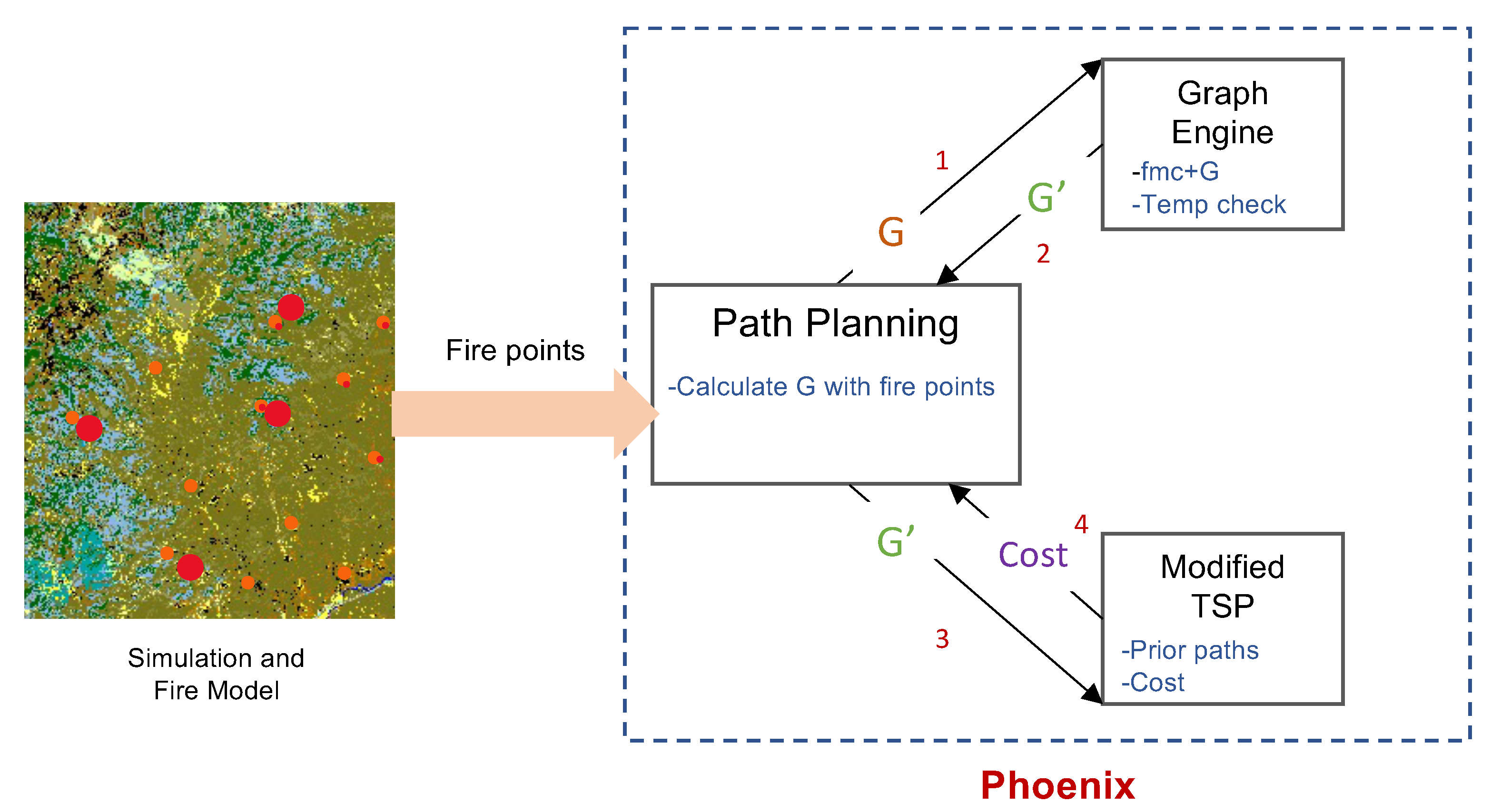
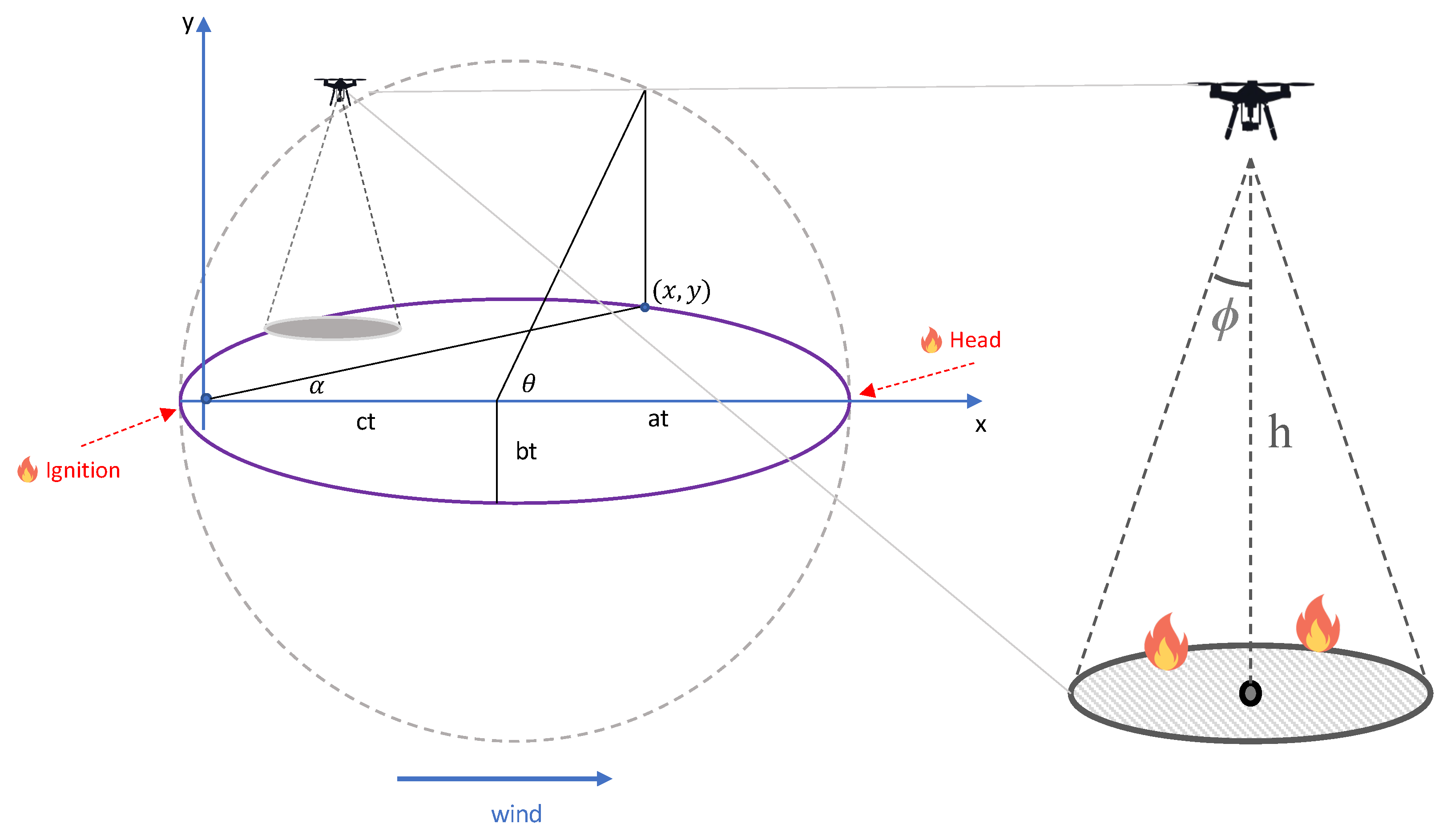
- We implement the Phoenix method, which consists of a path planning algorithm, a graph engine algorithm, and a modified TSP algorithm for monitoring. In this part, we utilize the elliptical fire model and fire simulation to map possible fire zones for the UAV to monitor. Then, we identify the critical paths of the fire zone using fuel moisture content data. In the last step, we calculate new flying paths according to the critical path and temperature of the fire area.
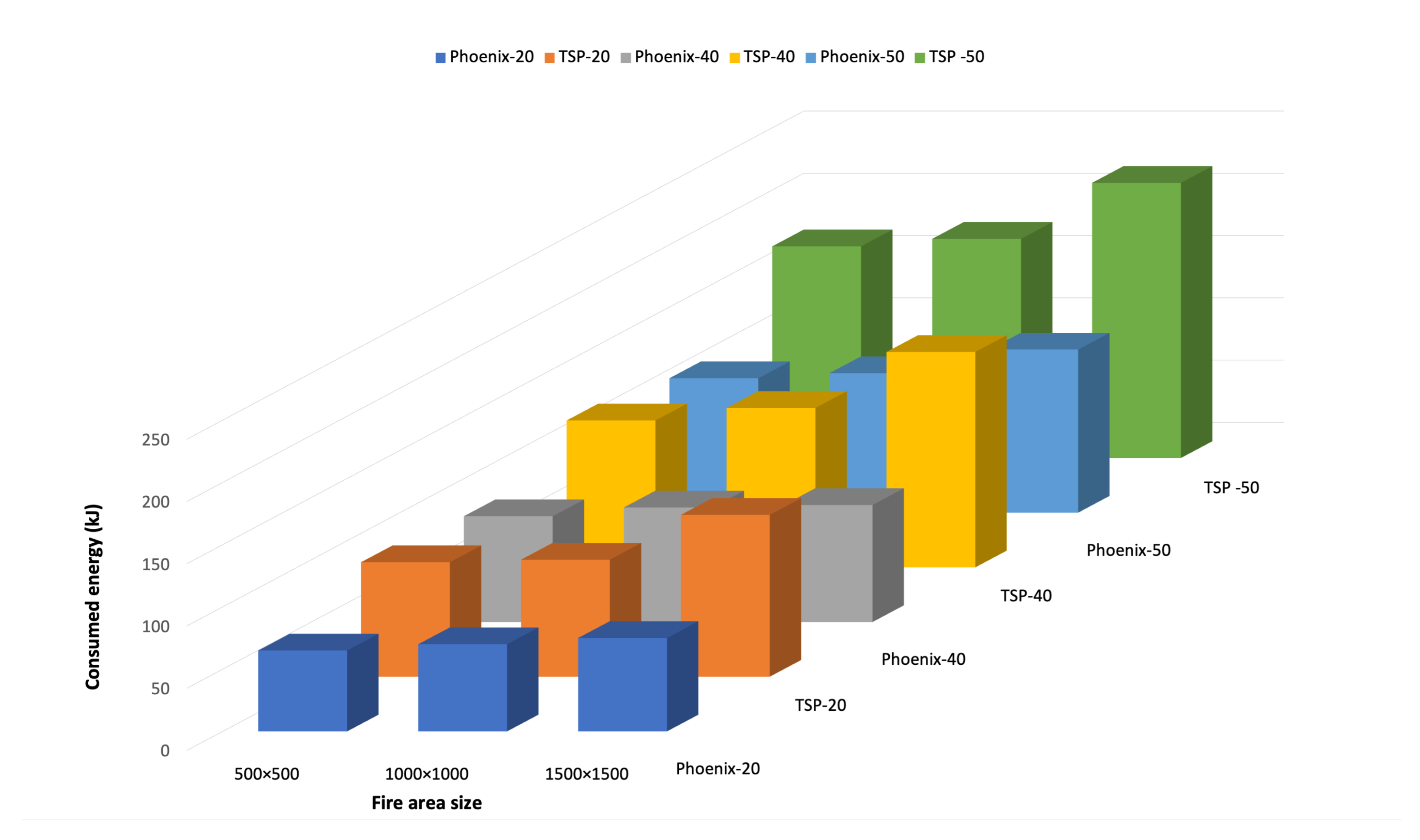
- We analyze and optimize energy consumption for a single UAV for a critical wildfire mission according to altitude and prior fire zones.
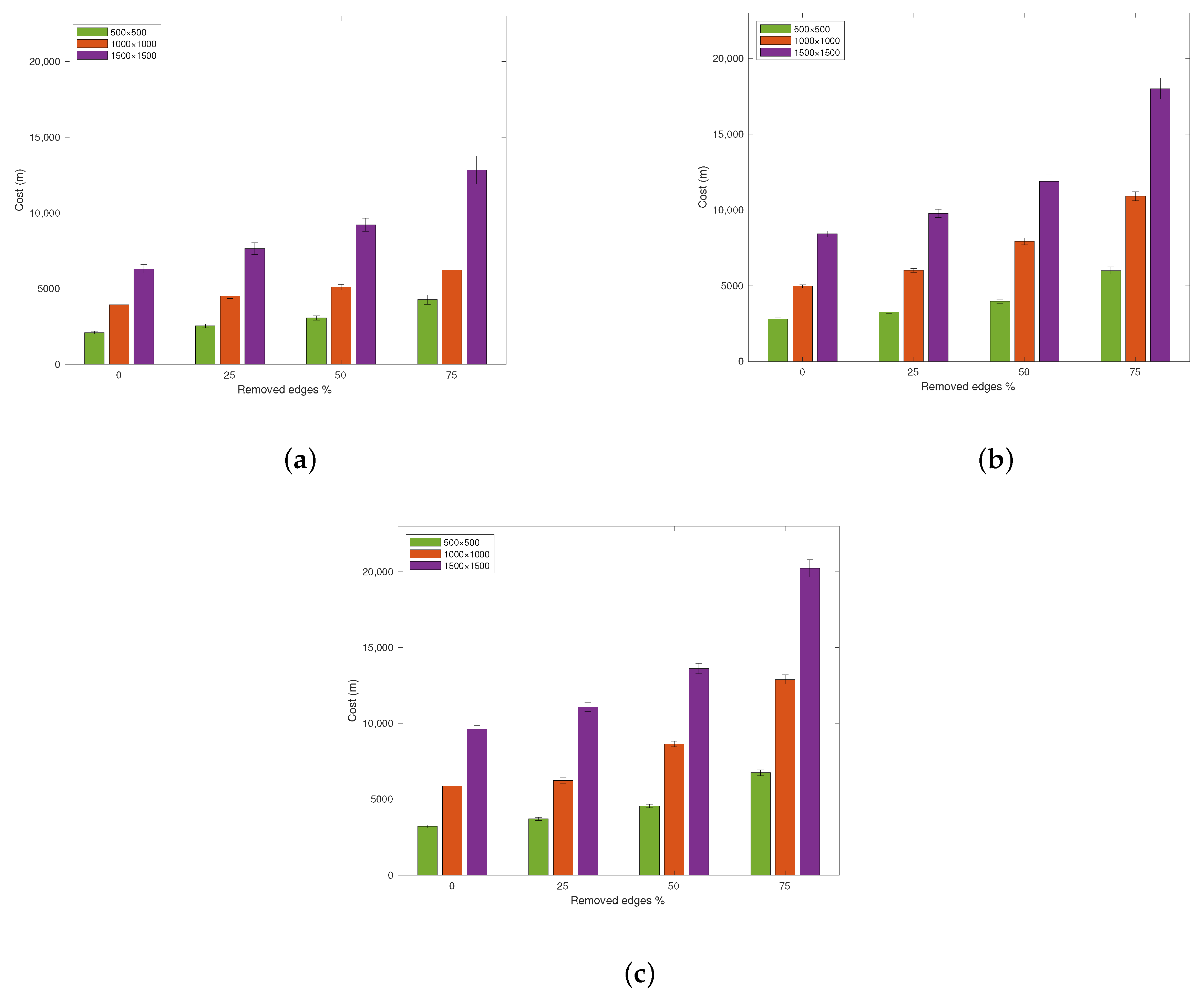
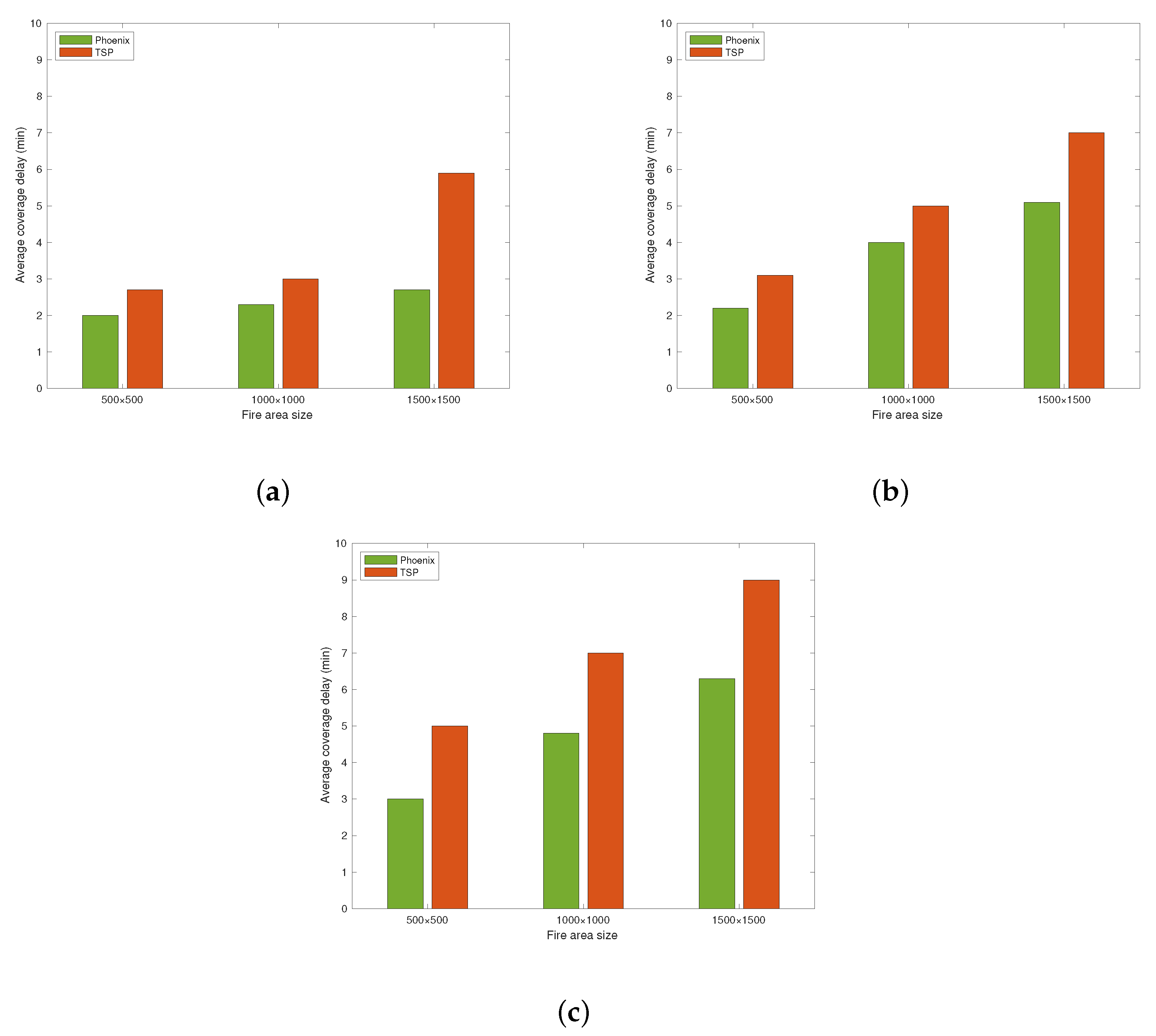
- We provide performance evaluation for our proposed method, which compares different fire area sizes and several clusters in terms of cost, energy consumption, coverage delay, and coverage ratio.
2. Proposed Method and Application
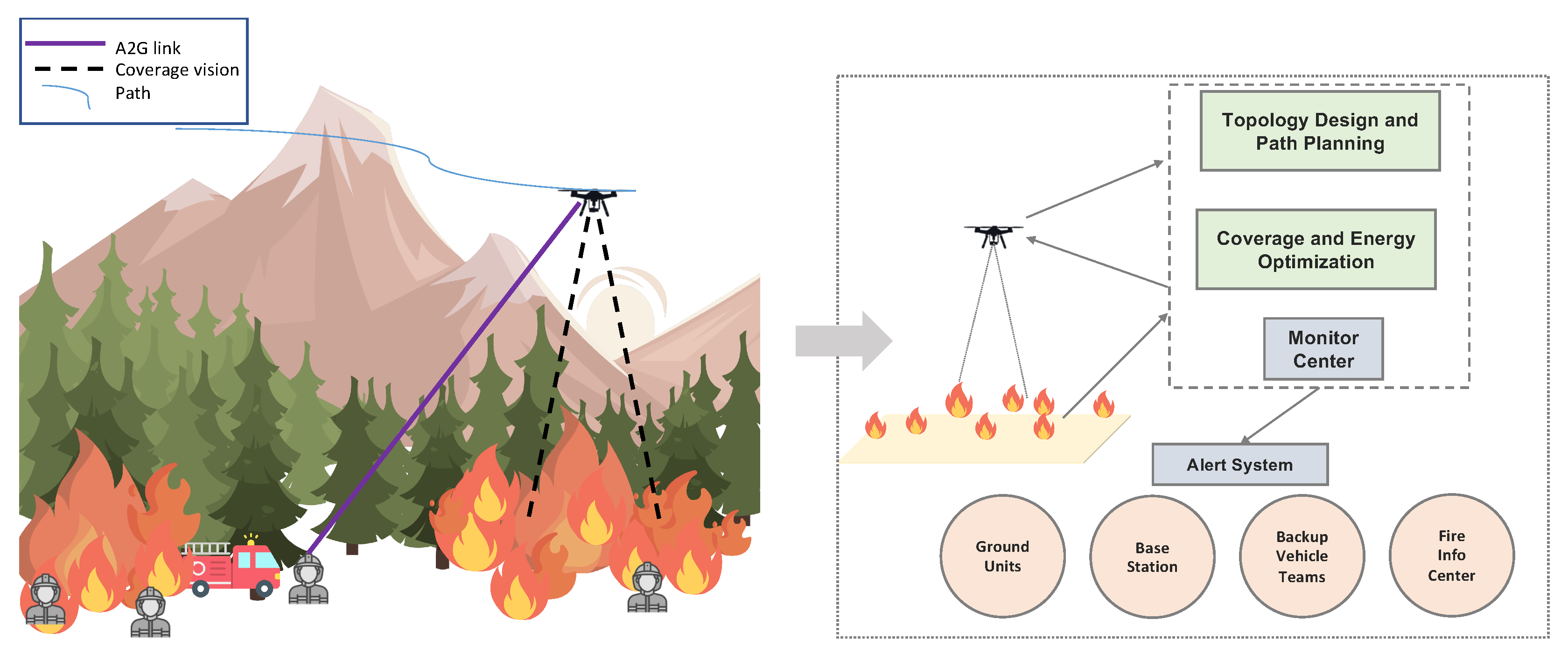
2.1. Application Architecture
Topology Design and Path Planning



| Algorithm 1: Path Planning Algorithm. |
|
- Flight distance for safety;
- Energy constraints for a UAV.
| Algorithm 2: Graph Engine Algorithm. |
|
| Algorithm 3: Modified TSP Algorithm. |
|
- The size of the fire area;
- The number of fire ignition points;
- The distance of fire clusters from each other.
2.2. Network Architecture
2.3. Coverage and Energy Optimization
3. Performance Evaluation and Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Australian Fires Fueled Unprecedented Blooms. Available online: https://earthobservatory.nasa.gov/images/149039/australian-fires-fueled-unprecedented-blooms (accessed on 15 February 2022).
- Wildfires Produced Record-Breaking Emissions this Year from U.S. to Turkey. Available online: https://www.cnbc.com/2021/12/06/wildfires-broke-emissions-records-this-year-in-us-turkey.html (accessed on 28 March 2022).
- Commission, E.; Centre, J.R.; San-Miguel-Ayanz, J.; Durrant, T.; Boca, R.; Maianti, P.; Libertà, G.; Artés Vivancos, T.; Oom, D.; Branco, A.; et al. Forest Fires in Europe, Middle East and North Africa 2021; Publications Office of the European Union: Luxembourg, 2022. [Google Scholar] [CrossRef]
- Trotta, A.; Felice, M.D.; Perilli, L.; Scarselli, E.F.; Cinotti, T.S. BEE-DRONES: Ultra low-power monitoring systems based on unmanned aerial vehicles and wake-up radio ground sensors. Comput. Netw. 2020, 180, 107425. [Google Scholar] [CrossRef]
- Wang, C.N.; Yang, F.C.; Vo, N.T.; Nguyen, V.T.T. Wireless Communications for Data Security: Efficiency Assessment of Cybersecurity Industry—A Promising Application for UAVs. Drones 2022, 6, 363. [Google Scholar] [CrossRef]
- Bozkaya, E.; Özçevik, Y.; Akkoç, M.; Erol, M.R.; Canberk, B. Energy-aware mobility for aerial networks: A reinforcement learning approach. Int. J. Netw. Manag. 2022, 32, e2185. [Google Scholar] [CrossRef]
- Cheng, H.; Bertizzolo, L.; D’oro, S.; Buczek, J.; Melodia, T.; Bentley, E.S. Learning to Fly: A Distributed Deep Reinforcement Learning Framework for Software-Defined UAV Network Control. IEEE Open J. Commun. Soc. 2021, 2, 1486–1504. [Google Scholar] [CrossRef]
- Albanese, A.; Sciancalepore, V.; Costa-Pérez, X. SARDO: An Automated Search-and-Rescue Drone-Based Solution for Victims Localization. IEEE Trans. Mob. Comput. 2022, 21, 3312–3325. [Google Scholar] [CrossRef]
- Afghah, F.; Razi, A.; Chakareski, J.; Ashdown, J. Wildfire Monitoring in Remote Areas using Autonomous Unmanned Aerial Vehicles. In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 835–840. [Google Scholar] [CrossRef] [Green Version]
- Rashid, M.T.; Zhang, Y.; Zhang, D.; Wang, D. CompDrone: Towards Integrated Computational Model and Social Drone Based Wildfire Monitoring. In Proceedings of the 2020 16th International Conference on Distributed Computing in Sensor Systems (DCOSS), Marina del Rey, CA, USA, 25–27 May 2020; pp. 43–50. [Google Scholar] [CrossRef]
- Giuseppi, A.; Germanà, R.; Fiorini, F.; Delli Priscoli, F.; Pietrabissa, A. UAV Patrolling for Wildfire Monitoring by a Dynamic Voronoi Tessellation on Satellite Data. Drones 2021, 5, 130. [Google Scholar] [CrossRef]
- Saffre, F.; Hildmann, H.; Karvonen, H.; Lind, T. Monitoring and Cordoning Wildfires with an Autonomous Swarm of Unmanned Aerial Vehicles. Drones 2022, 6, 301. [Google Scholar] [CrossRef]
- Gharakhanlou, N.M.; Hooshangi, N. Dynamic simulation of fire propagation in forests and rangelands using a GIS-based cellular automata model. Int. J. Wildland Fire 2021, 30, 652–663. [Google Scholar] [CrossRef]
- Bailon-Ruiz, R.; Lacroix, S.; Bit-Monnot, A. Planning to Monitor Wildfires with a Fleet of UAVs. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4729–4734. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.; Liu, H.H. Topology-based distributed optimization for multi-UAV cooperative wildfire monitoring. Optim. Control Appl. Methods 2018, 39, 1530–1548. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, H.H.T.; Wotton, M. Kalman Filter-Based Large-Scale Wildfire Monitoring With a System of UAVs. IEEE Trans. Ind. Electron. 2019, 66, 606–615. [Google Scholar] [CrossRef]
- Sethuraman, S.C.; Tadkapally, G.R.; Mohanty, S.P.; Subramanian, A. iDrone: IoT-Enabled Unmanned Aerial Vehicles for Detecting Wildfires Using Convolutional Neural Networks. SN Comput. Sci. 2022, 3, 1–13. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, J.; Li, X.; Zhang, J. Saliency detection and deep learning-based wildfire identification in UAV imagery. Sensors 2018, 18, 712. [Google Scholar] [CrossRef] [Green Version]
- Barmpoutis, P.; Stathaki, T.; Dimitropoulos, K.; Grammalidis, N. Early Fire Detection Based on Aerial 360-Degree Sensors, Deep Convolution Neural Networks and Exploitation of Fire Dynamic Textures. Remote Sens. 2020, 12, 3177. [Google Scholar] [CrossRef]
- Govil, K.; Welch, M.L.; Ball, J.T.; Pennypacker, C.R. Preliminary results from a wildfire detection system using deep learning on remote camera images. Remote Sens. 2020, 12, 166. [Google Scholar] [CrossRef] [Green Version]
- Sudhakar, S.; Vijayakumar, V.; Kumar, C.S.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned Aerial Vehicle (UAV) based Forest Fire Detection and monitoring for reducing false alarms in forest-fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Baik, S.W. Early fire detection using convolutional neural networks during surveillance for effective disaster management. Neurocomputing 2018, 288, 30–42. [Google Scholar] [CrossRef]
- Muhammad, K.; Khan, S.; Elhoseny, M.; Hassan Ahmed, S.; Wook Baik, S. Efficient Fire Detection for Uncertain Surveillance Environment. IEEE Trans. Ind. Inform. 2019, 15, 3113–3122. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, M.; Liu, K. Forest fire susceptibility modeling using a convolutional neural network for Yunnan province of China. Int. J. Disaster Risk Sci. 2019, 10, 386–403. [Google Scholar] [CrossRef] [Green Version]
- Glasa, J.; Halada, L. On elliptical model for forest fire spread modeling and simulation. Math. Comput. Simul. 2008, 78, 76–88. [Google Scholar] [CrossRef]
- Perry, G.L. Current approaches to modelling the spread of wildland fire: A review. Prog. Phys. Geogr. Earth Environ. 1998, 22, 222–245. [Google Scholar] [CrossRef]
- Chuvieco, E.; Aguado, I.; Salas, J.; García, M.; Yebra, M.; Oliva, P. Satellite remote sensing contributions to wildland fire science and management. Curr. For. Rep. 2020, 6, 81–96. [Google Scholar] [CrossRef]
- Yebra, M.; Quan, X.; Riaño, D.; Larraondo, P.R.; van Dijk, A.I.; Cary, G.J. A fuel moisture content and flammability monitoring methodology for continental Australia based on optical remote sensing. Remote Sens. Environ. 2018, 212, 260–272. [Google Scholar] [CrossRef]
- Beigi, P.; Rajabi, M.S.; Aghakhani, S. An Overview of Drone Energy Consumption Factors and Models. arXiv 2022, arXiv:2206.10775. [Google Scholar] [CrossRef]
- Trotta, A.; Felice, M.D.; Montori, F.; Chowdhury, K.R.; Bononi, L. Joint Coverage, Connectivity, and Charging Strategies for Distributed UAV Networks. IEEE Trans. Robot. 2018, 34, 883–900. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Çoğay, S.; Seçinti, G. Phoenix: Aerial Monitoring for Fighting Wildfires. Drones 2023, 7, 19. https://doi.org/10.3390/drones7010019
Çoğay S, Seçinti G. Phoenix: Aerial Monitoring for Fighting Wildfires. Drones. 2023; 7(1):19. https://doi.org/10.3390/drones7010019
Chicago/Turabian StyleÇoğay, Sultan, and Gökhan Seçinti. 2023. "Phoenix: Aerial Monitoring for Fighting Wildfires" Drones 7, no. 1: 19. https://doi.org/10.3390/drones7010019
APA StyleÇoğay, S., & Seçinti, G. (2023). Phoenix: Aerial Monitoring for Fighting Wildfires. Drones, 7(1), 19. https://doi.org/10.3390/drones7010019