
Dynamic Robust Spectrum Sensing Based on Goodness-of-Fit Test Using Bilateral Hypotheses

Abstract
:1. Introduction
2. Traditional GoF Test Based on Unilateral Hypothesis
- (A)
- KS test: To evaluate the relative distance, the empirical CDF of collected samples and the reference CDF are considered in KS test and is chosen. Then, the GoF test statistic can be obtained using the largest absolute distance between the two CDFs, which can be written asHere, sup represents the supremum function denoting the maximum value in a given set. In a practical scenario, it can be rewritten as [49]
- (B)
- CM test: In the CM test, the term is set to . In other words, CM test is an alternative to the KS test. The statistic of the CM test is defined byThe integral can be divided into n parts as provided in [47]. Then, can be approximately rewritten by
- (C)
- AD test: It can be seen from Equation (10) for distribution , there is not enough weight to the tails included in . Thus, Anderson and Darling generalized the CM test statistic in order to enhance the difference between the lower and upper tails of the distribution. By choosing , the AD test statistic is given as follows [48]:For an efficient implementation, the simplified formula of the AD statistic can be denoted as [47]:with . n is the number of the collected samples.
3. Proposed Enhanced GoF Test-Based Spectrum Sensing Using Bilateral Hypotheses
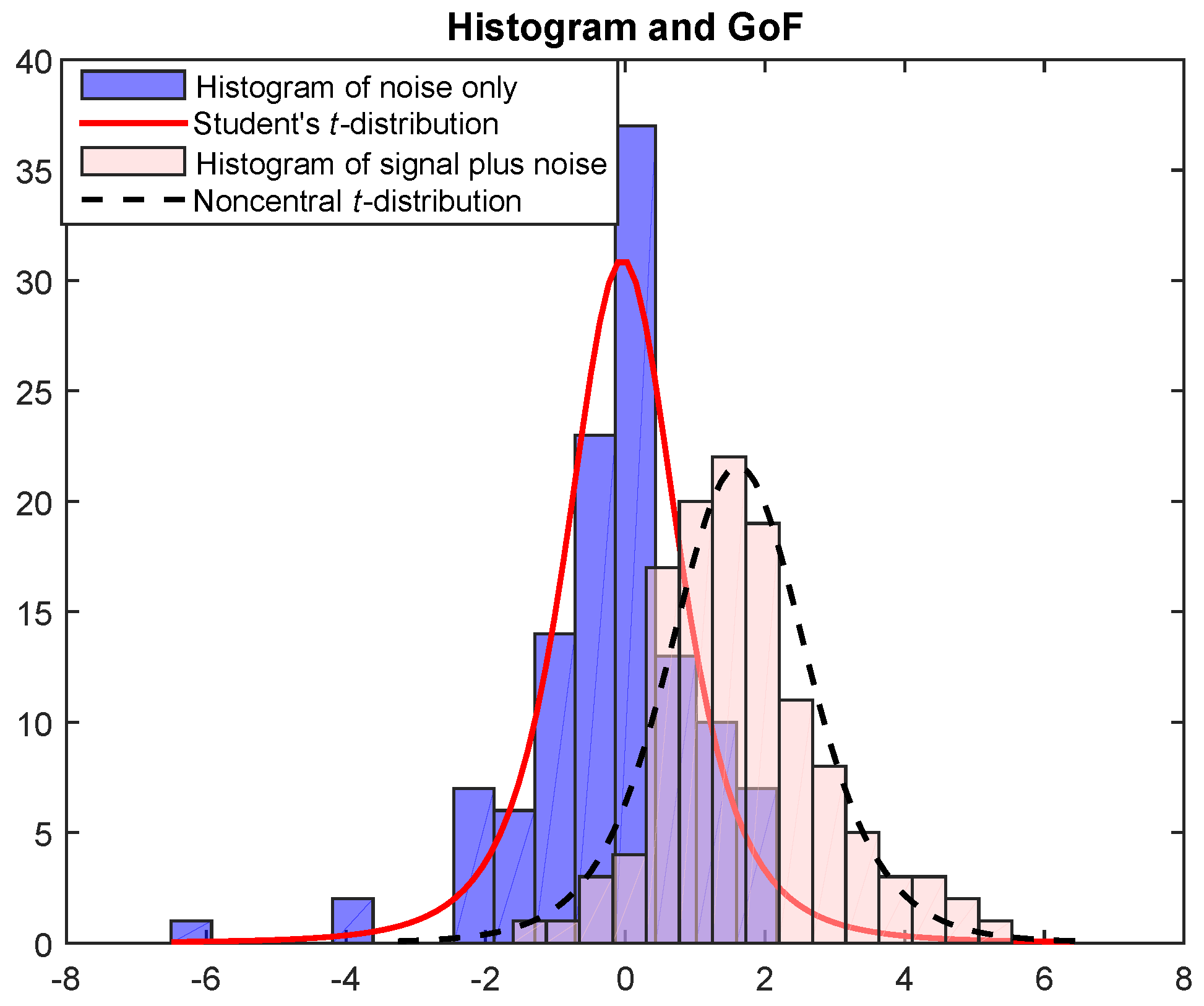
3.1. Statistical Model of the Collected Samples
3.2. Powerful GoF Test
3.3. Final Decision Based on Bilateral Hypotheses
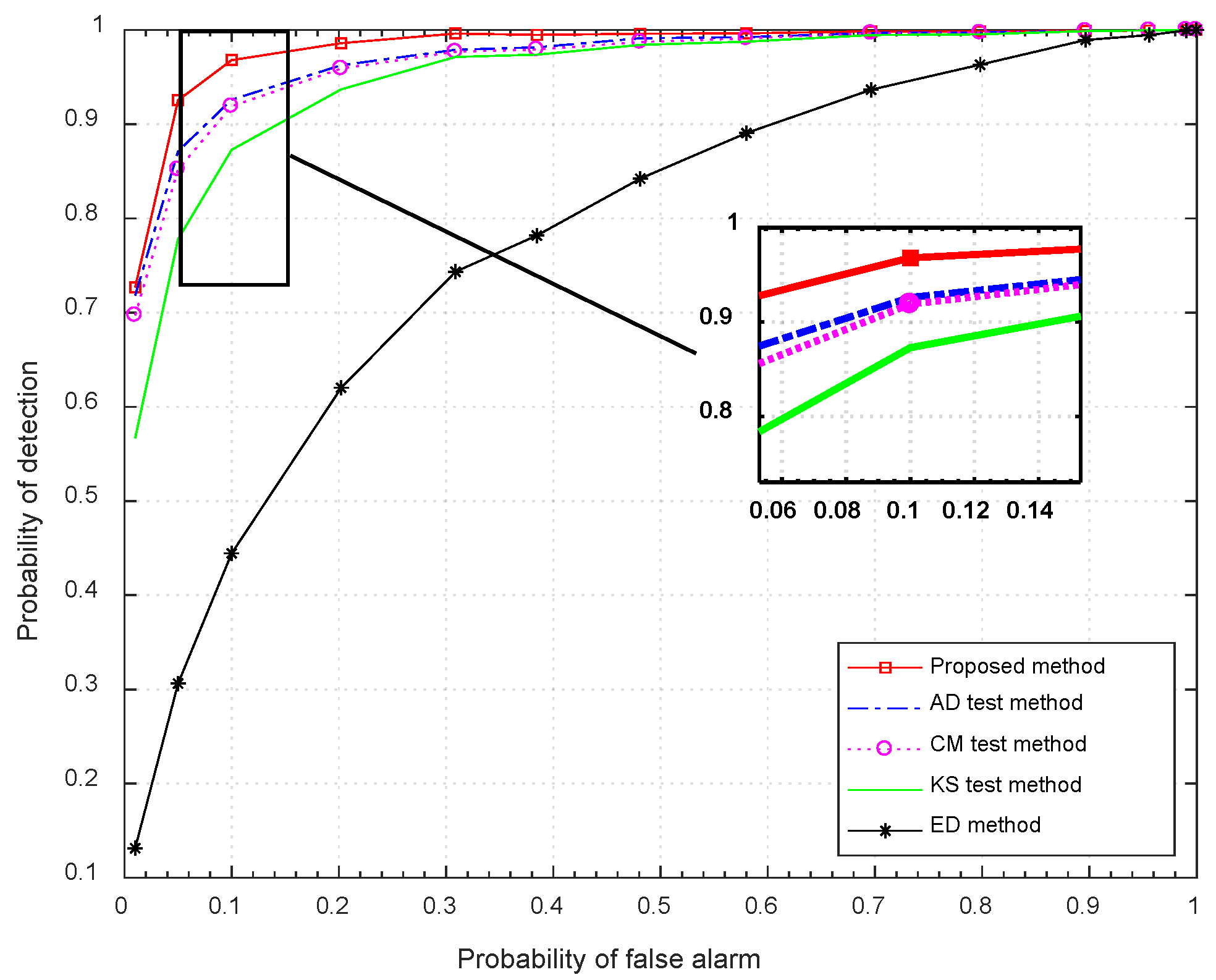
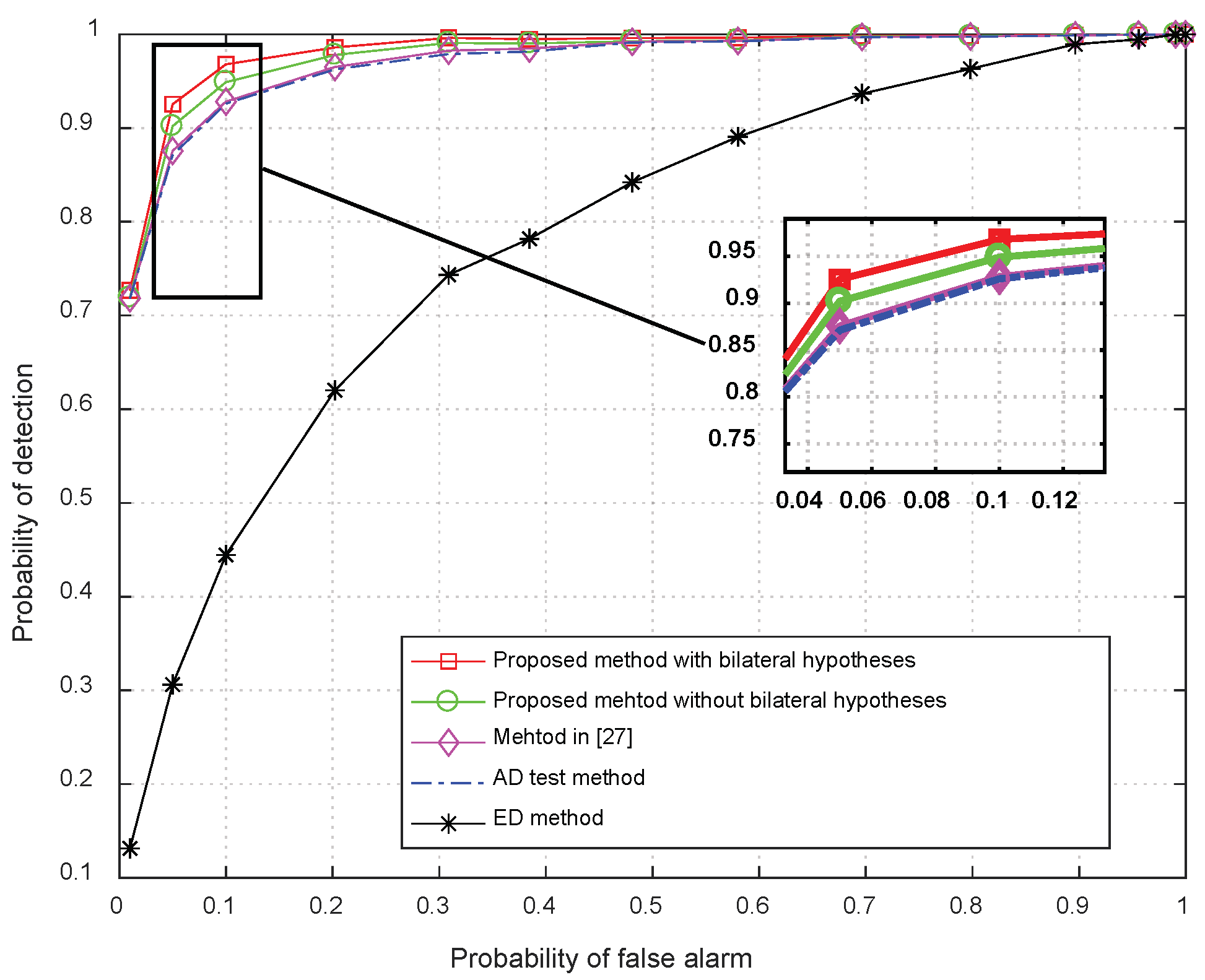
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adamopoulos, E.; Rinaudo, F. UAS-Based Archaeological Remote Sensing: Review, Meta-Analysis and State-of-the-Art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Kaplan, B.; Kahraman, I.; Gorcin, A.; Çırpan, H.A.; Ekti, A.R. Measurement based FHSS–type Drone Controller Detection at 2.4GHz: An STFT Approach. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar]
- Wang, D.; He, T.; Zhou, F.; Cheng, J.; Zhang, R.; Wu, Q. Outage-driven link selection for secure buffer-aided networks. Sci. China Inf. Sci. 2022, 65, 182303. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; He, Y.; Pang, L.; Xu, Q.; Zhang, R. An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sens. 2022, 14, 4501. [Google Scholar] [CrossRef]
- Ahmad, A.; Ahmad, S.; Rehmani, M.H.; Hassan, N.U. A Survey on Radio Resource Allocation in Cognitive Radio Sensor Networks. IEEE Commun. Surv. Tuts. 2015, 17, 888–917. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Meng, W. Cooperative communications for cognitive radio networks from theory to applications. IEEE Commun. Surv. Tuts. 2014, 16, 1180–1192. [Google Scholar] [CrossRef]
- Kakalou, I.; Psannis, K.E.; Krawiec, P.; Badea, R. Cognitive radio network and network service chaining toward 5g: Challenges and requirements. IEEE Commun. Mag. 2017, 55, 145–151. [Google Scholar] [CrossRef]
- Liang, W.; Ng, S.X.; Hanzo, L. Cooperative overlay spectrum access in cognitive radio networks. IEEE Commun. Surv. Tuts. 2017, 19, 1924–1944. [Google Scholar] [CrossRef] [Green Version]
- Hefnawi, M. Large-Scale Multi-Cluster MIMO Approach for Cognitive Radio Sensor Networks. IEEE Sens. J. 2016, 16, 4418–4424. [Google Scholar] [CrossRef]
- Akan, O.B.; Karli, O.B.; Ergul, O. Cognitive radio sensor networks. IEEE Netw. 2009, 23, 34–40. [Google Scholar] [CrossRef]
- Joshi, G.P.; Nam, S.Y.; Kim, S.W. Cognitive radio wireless sensor networks: Applications, challenges and research trends. Sensors 2013, 13, 11196–11228. [Google Scholar] [CrossRef]
- Wang, D.; Zhou, F.; Lin, W.; Ding, Z.; Dhahir, N.A. Cooperative Hybrid Non-Orthogonal Multiple Access Based Mobile-Edge Computing in Cognitive Radio Networks. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1104–1117. [Google Scholar] [CrossRef]
- Ali, A.; Hamouda, W. Advances on Spectrum Sensing for Cognitive Radio Networks: Theory and Applications. IEEE Commun. Surv. Tuts. 2017, 19, 1277–1304. [Google Scholar] [CrossRef]
- Axell, E.; Leus, G.; Larsson, E.G.; Poor, H.V. Spectrum sensing for cognitive radio: State-of-the-art and recent advances. IEEE Signal Process. Mag. 2012, 29, 101–116. [Google Scholar] [CrossRef] [Green Version]
- Cicho, K.; Kliks, A.; Bogucka, H. Energy-Efficient Cooperative Spectrum Sensing: A Survey. IEEE Commun. Surv. Tuts. 2016, 18, 1861–1886. [Google Scholar] [CrossRef]
- Yücek, T.; Arslan, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tuts. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Wang, B.; Liu, K.J. Advances in cognitive radio networks: A survey. IEEE J. Sel. Top. Signal Process. 2011, 5, 5–23. [Google Scholar] [CrossRef] [Green Version]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Sofotasios, P.C.; Rebeiz, E.; Tsiftsis, L.Z.T.A.; Cabric, D.; Freear, S. Energy Detection Based Spectrum Sensing Overκ—μ and κ—μExtreme Fading Channels. IEEE Trans. Veh. Technol. 2013, 62, 1031–1040. [Google Scholar] [CrossRef]
- Chatziantonious, E.; Allen, B.; Velisavljevic, V.; Karadimas, P.; Coon, J. Energy Detection Based Spectrum Sensing Over Two-Wave With Diffuse Power Fading Channels. IEEE Trans. Veh. Technol. 2017, 66, 868–874. [Google Scholar]
- Zeng, Y.; Liang, Y.C. Eigenvalue-based spectrum sensing algorithms for cognitive radio. IEEE Trans. Commun. 2009, 57, 1784–1793. [Google Scholar] [CrossRef] [Green Version]
- Tsinos, C.G.; Berberidis, K. Decentralized Adaptive Eigenvalue-Based Spectrum Sensing for Multiantenna Cognitive Radio Systems. IEEE Trans. Wireless Commun. 2015, 14, 1703–1715. [Google Scholar] [CrossRef]
- Bouallegue, K.; Dayoub, I.; Gharbi, M.; Hassan, K. Blind Spectrum Sensing Using Extreme Eigenvalues for Cognitive Radio Networks. IEEE Commun. Lett. 2018, 2, 1386–1389. [Google Scholar] [CrossRef]
- Nguyen-Thanh, N.; Kieu-Xuan, T.; Koo, I. Comments and Corrections Comments on “Spectrum Sensing in Cognitive Radio Using Goodness-of-Fit Testing”. IEEE Trans. Wirel. Commun. 2012, 11, 3409–3411. [Google Scholar] [CrossRef]
- Teguig, D.; Nir, V.L.; Scheers, B. Spectrum sensing method based on goodness of fit test using chi-square distribution. Electron. Lett. 2014, 50, 713–715. [Google Scholar] [CrossRef] [Green Version]
- Teguig, D.; Nir, V.L.; Scheers, B. Spectrum sensing Method Based on the Likelihood Ratio Goodness of Fit test under noise uncertainty. Electron. Lett. 2015, 51, 253–255. [Google Scholar] [CrossRef] [Green Version]
- Scheers, B.; Teguig, D.; Nir, V.L. Wideband spectrum sensing technique based on Goodness-of-Fit testing. In Proceedings of the 2015 International Conference on Military Communications and Information Systems (ICMCIS), Cracow, Poland, 16 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Jin, M.; Guo, Q.; Xi, J.; Yu, Y. Spectrum sensing based on goodness of fit test with unilateral alternative hypothesis. Electron. Lett. 2014, 50, 1645–1646. [Google Scholar] [CrossRef]
- Kockaya, K.; Develi, I. Spectrum sensing in cognitive radio networks: Threshold optimization and analysis. J. Wirel. Com Netw. 2020, 2020, 255. [Google Scholar] [CrossRef]
- Gai, J.; Zhang, L.; Wei, Z. Spectrum Sensing Based on STFT-ImpResNet for Cognitive Radio. Electronics 2022, 11, 2437. [Google Scholar] [CrossRef]
- Wang, H.; Yang, E.H.; Zhao, Z.; Zhang, W. Spectrum sensing in cognitive radio using goodness of fit testing. IEEE Trans. Wirel. Commun. 2009, 8, 5427–5430. [Google Scholar] [CrossRef]
- Shen, L.; Wang, H.; Zhang, W.; Zhao, Z. Blind spectrum sensing for cognitive radio channels with noise uncertainty. IEEE Trans. Wirel. Commun. 2011, 10, 1721–1724. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, X.; Liang, Y.C.; Liu, J. Fast and robust spectrum sensing via Kolmogorov-Smirnov test. IEEE Trans. Commun. 2010, 58, 3410–3416. [Google Scholar] [CrossRef]
- Patel, D.K.; Trivedi, Y.N. Goodness-of-fit-based non-parametric spectrum sensing under Middleton noise for cognitive radio. Electron. Lett. 2015, 51, 419–421. [Google Scholar] [CrossRef]
- Ye, Y.; Lu, G.; Li, Y.; Jin, M. Unilateral right-tail Anderson-Darling test based spectrum sensing for cognitive radio. Electron. Lett. 2017, 53, 1256–1258. [Google Scholar] [CrossRef]
- Liu, C.; Wang, J.; Liu, X.; Liang, Y. Maximum Eigenvalue-Based Goodness-of-Fit Detection for Spectrum Sensing in Cognitive Radio. IEEE Trans. Veh. Technol. 2019, 68, 7747–7760. [Google Scholar] [CrossRef]
- Rugini, L.; Banelli, P.; Leus, G. Small sample size performance of the energy detector. IEEE Commun. Lett. 2013, 17, 1814–1817. [Google Scholar] [CrossRef] [Green Version]
- Arshad, K.; Moessner, K. Robust spectrum sensing based on statistical tests. IET Commun. 2013, 7, 808–817. [Google Scholar] [CrossRef] [Green Version]
- Men, S.; Chargé, P.; Wang, Y.; Li, J. Wideband signal detection for cognitive radio applications with limited resources. Eurasip J. Adv. Signal Process. 2019, 2019, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Rostami, S.; Arshad, K.; Moessner, K. Order-statistic based spectrum sensing for cognitive radio. IEEE Commun. Lett. 2012, 16, 592–595. [Google Scholar] [CrossRef] [Green Version]
- Denkovski, D.; Atanasovski, V.; Gavrilovska, L. HOS Based Goodness-of-Fit Testing Signal Detection. IEEE Commun. Lett. 2012, 16, 310–313. [Google Scholar] [CrossRef]
- Pakyari, R.; Balakrishnan, N. A General Purpose Approximate Goodness-of-Fit Test for Progressively Type-II Censored Data. IEEE Trans. Reliab. 2012, 61, 238–244. [Google Scholar] [CrossRef]
- Noughabi, H.A.; Balakrishnan, N. Goodness of Fit Using a New Estimate of Kullback-Leibler Information Based on Type II Censored Data. IEEE Trans. Reliab. 2015, 64, 627–635. [Google Scholar] [CrossRef]
- Qiu, Y.; Liu, L.; Lai, X.; Qiu, Y. An Online Test for Goodness-of-Fit in Logistic Regression Model. IEEE Access 2019, 7, 107179–107187. [Google Scholar] [CrossRef]
- Zhang, J. Powerful goodness-of-fit tests based on the likelihood ratio. J. Roy. Statist. Soc. Ser. B 2002, 64, 281–294. [Google Scholar] [CrossRef]
- Terry, K.; Agostino, R.B.; Stephens, M.A. Goodness-of-Fit Techniques. Technometrics 1987, 29, 493. [Google Scholar]
- Stephens, M.A. EDF statistics for goodness of fit and some comparisons. J. Amer. Statist. Assoc. 1974, 69, 730–737. [Google Scholar] [CrossRef]
- Anderson, T.W.; Darling, D.A. Asymptotic theory of certai “goodness of fit” criteria based on stochastic processes. Ann. Math. Stat. 1952, 23, 193–212. [Google Scholar] [CrossRef]
- Stephens, M.A. Use of the Kolmogorov-Smirnov, Cramer-Von Mises and Related Statistics Without Extensive Tables. J. R. Stat. Soc. Ser. B 1970, 32, 115–122. [Google Scholar] [CrossRef]
- Forbes, C.; Evans, M.; Hastings, N.; Peacock, B. Statistical Distributions; John Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
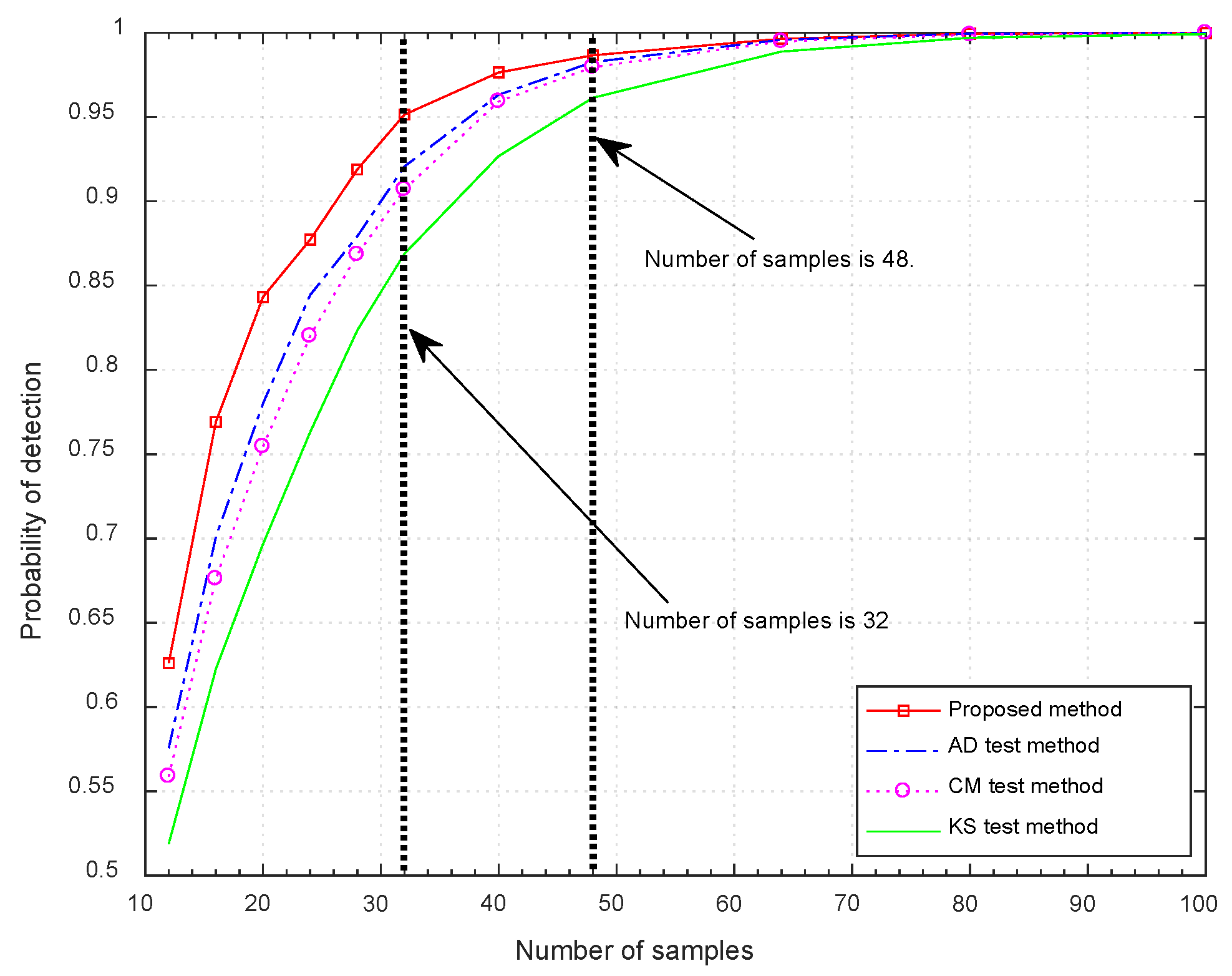
| Number of Samples | KS Test Method | CM Test Method | AD Test Method | Proposed Method |
|---|---|---|---|---|
| 32 | 0.8688 | 0.9070 | 0.9206 | 0.9514 |
| 40 | 0.9268 | 0.9592 | 0.9632 | 0.9764 |
| 48 | 0.9614 | 0.9796 | 0.9826 | 0.9866 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Men, S.; Chargé, P.; Fu, Z. Dynamic Robust Spectrum Sensing Based on Goodness-of-Fit Test Using Bilateral Hypotheses. Drones 2023, 7, 18. https://doi.org/10.3390/drones7010018
Men S, Chargé P, Fu Z. Dynamic Robust Spectrum Sensing Based on Goodness-of-Fit Test Using Bilateral Hypotheses. Drones. 2023; 7(1):18. https://doi.org/10.3390/drones7010018
Chicago/Turabian StyleMen, Shaoyang, Pascal Chargé, and Zhe Fu. 2023. "Dynamic Robust Spectrum Sensing Based on Goodness-of-Fit Test Using Bilateral Hypotheses" Drones 7, no. 1: 18. https://doi.org/10.3390/drones7010018
APA StyleMen, S., Chargé, P., & Fu, Z. (2023). Dynamic Robust Spectrum Sensing Based on Goodness-of-Fit Test Using Bilateral Hypotheses. Drones, 7(1), 18. https://doi.org/10.3390/drones7010018