
Integrated Communication and Measurement System with BOC-Assisted OFDM


Abstract
:1. Introduction
2. The Transmitting and Receiving System for the Composite Signal
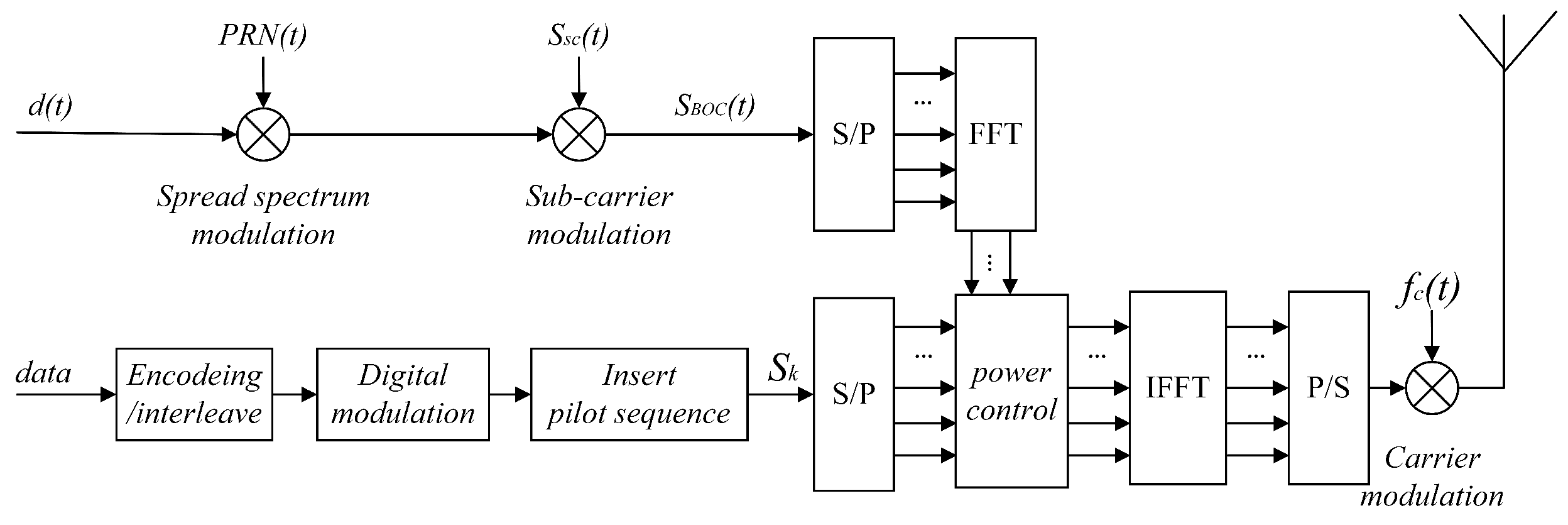
2.1. Signal Model
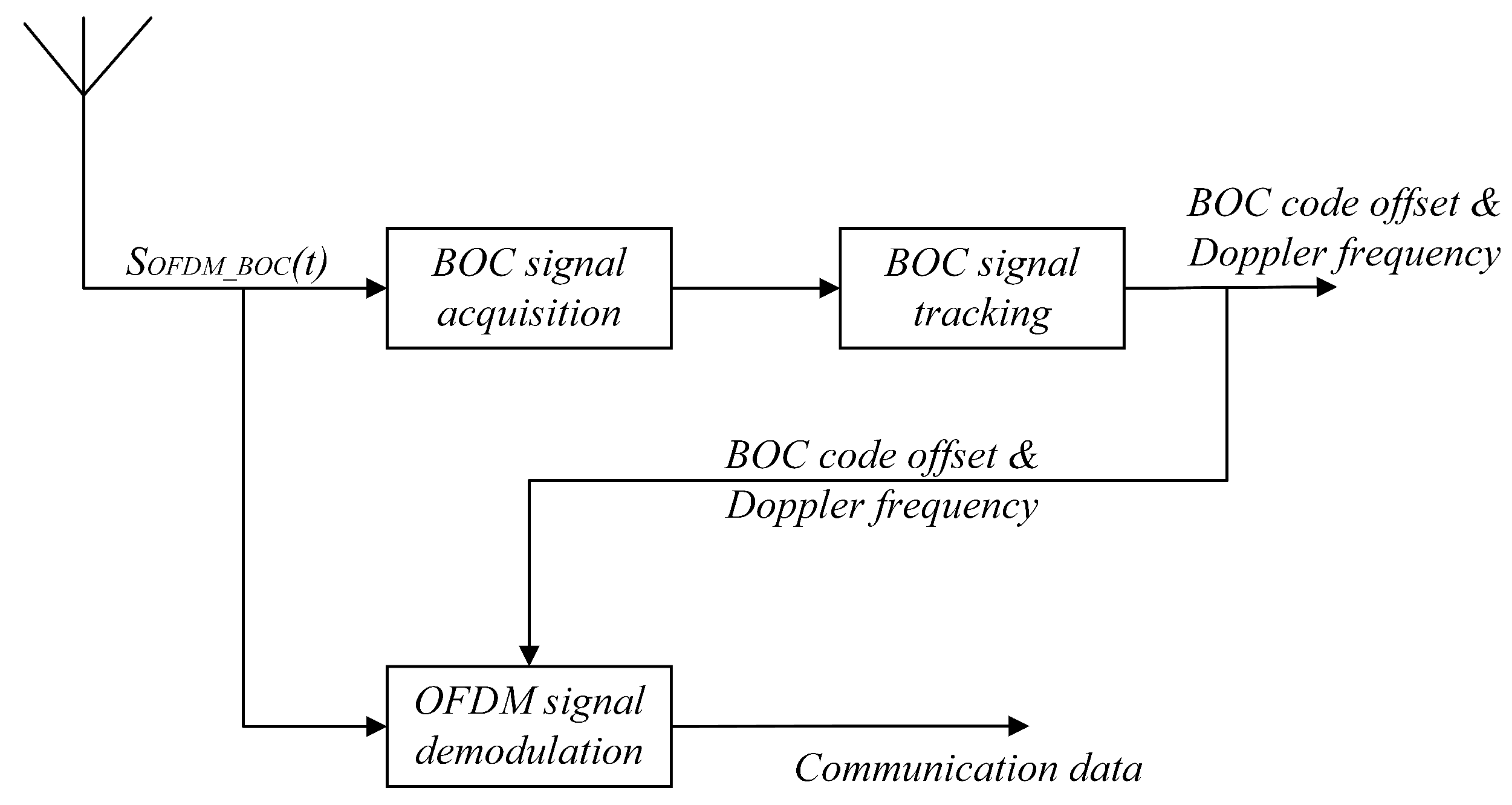
2.2. Reception of the composite signal
3. Reception of the Composite Signal
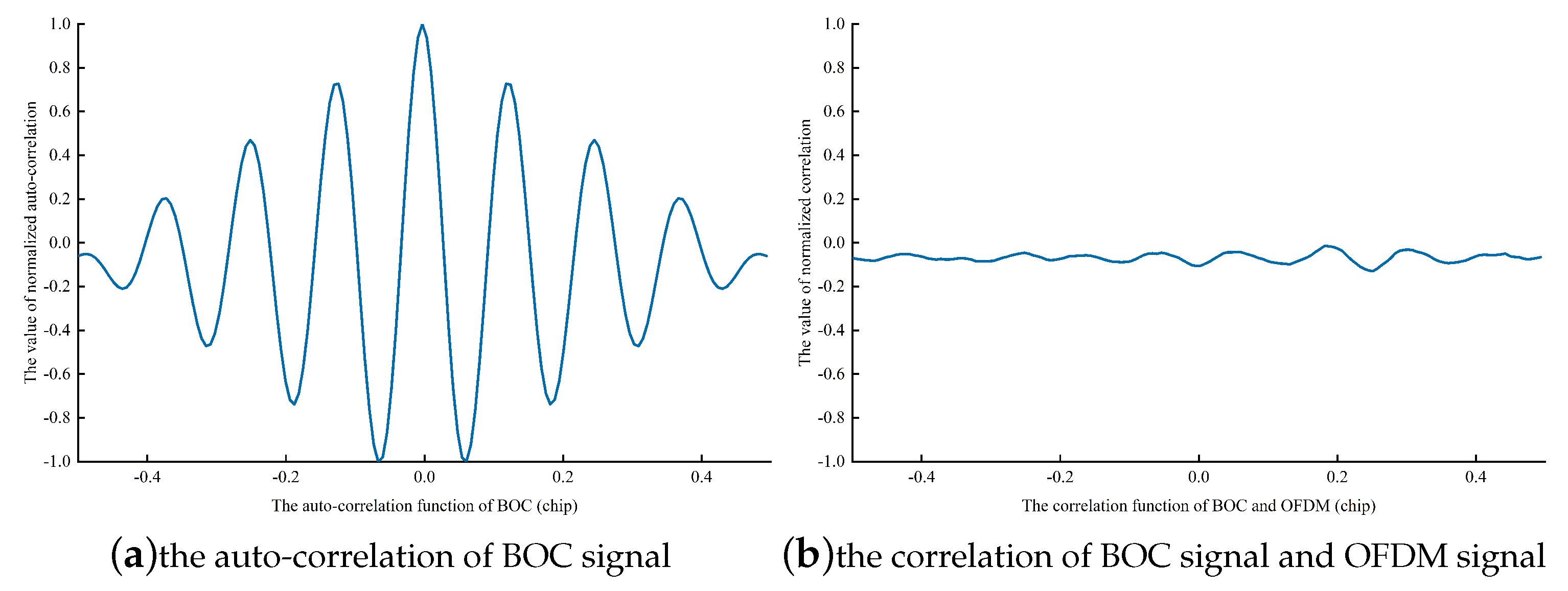
3.1. Independence of the Reception of the BOC and OFDM Signals
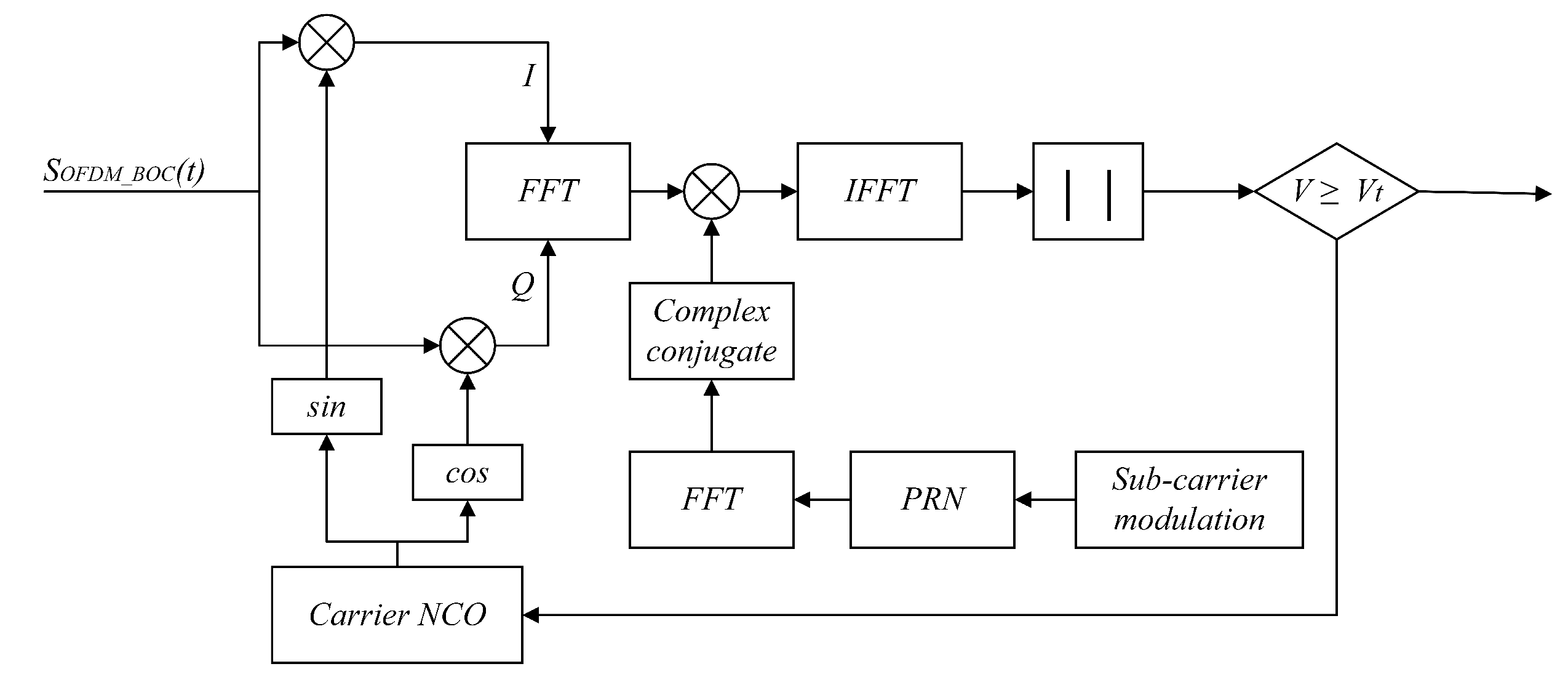
3.2. Acquisition of the BOC Signal
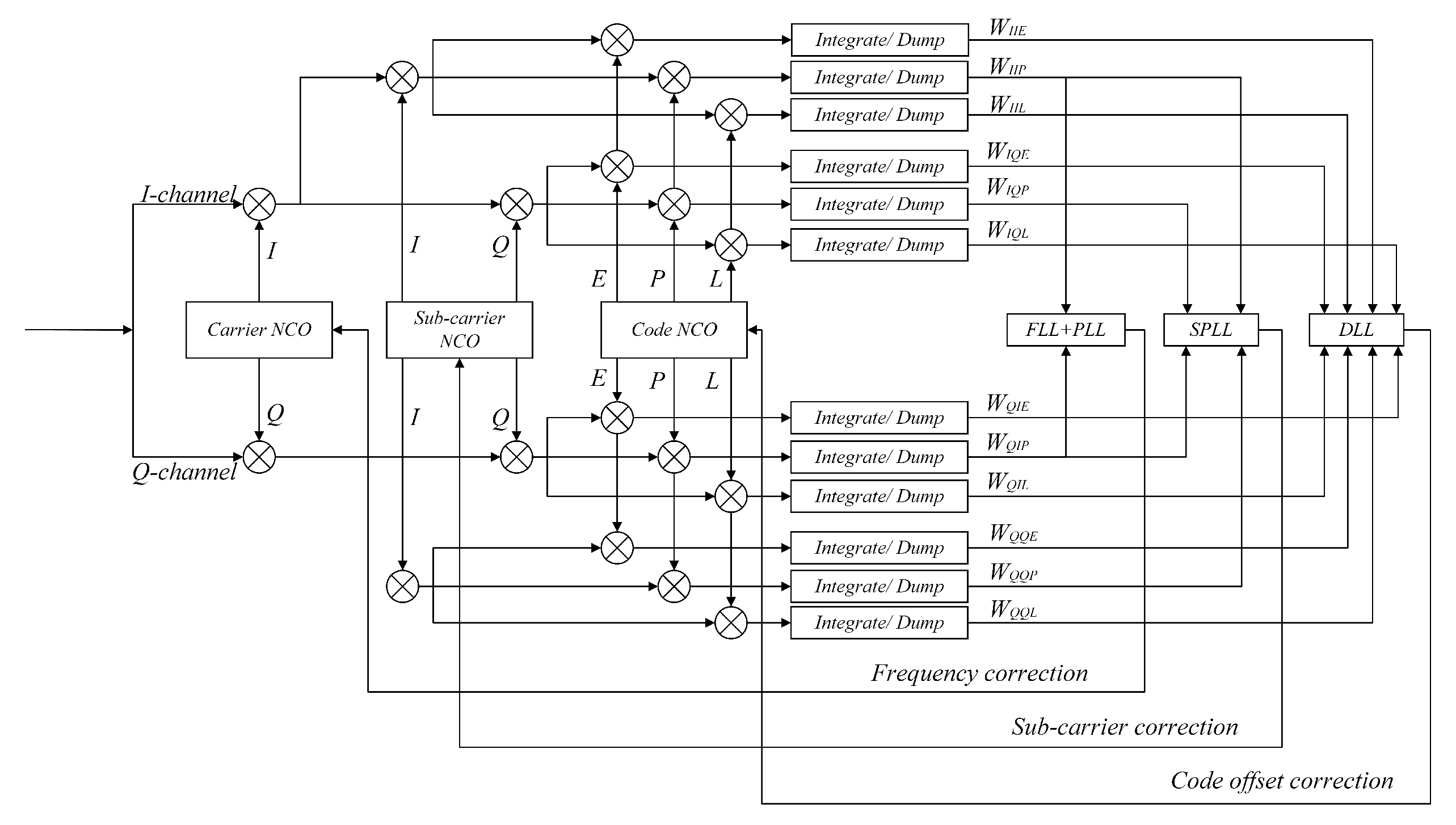
3.3. Tracking of the BOC Signal
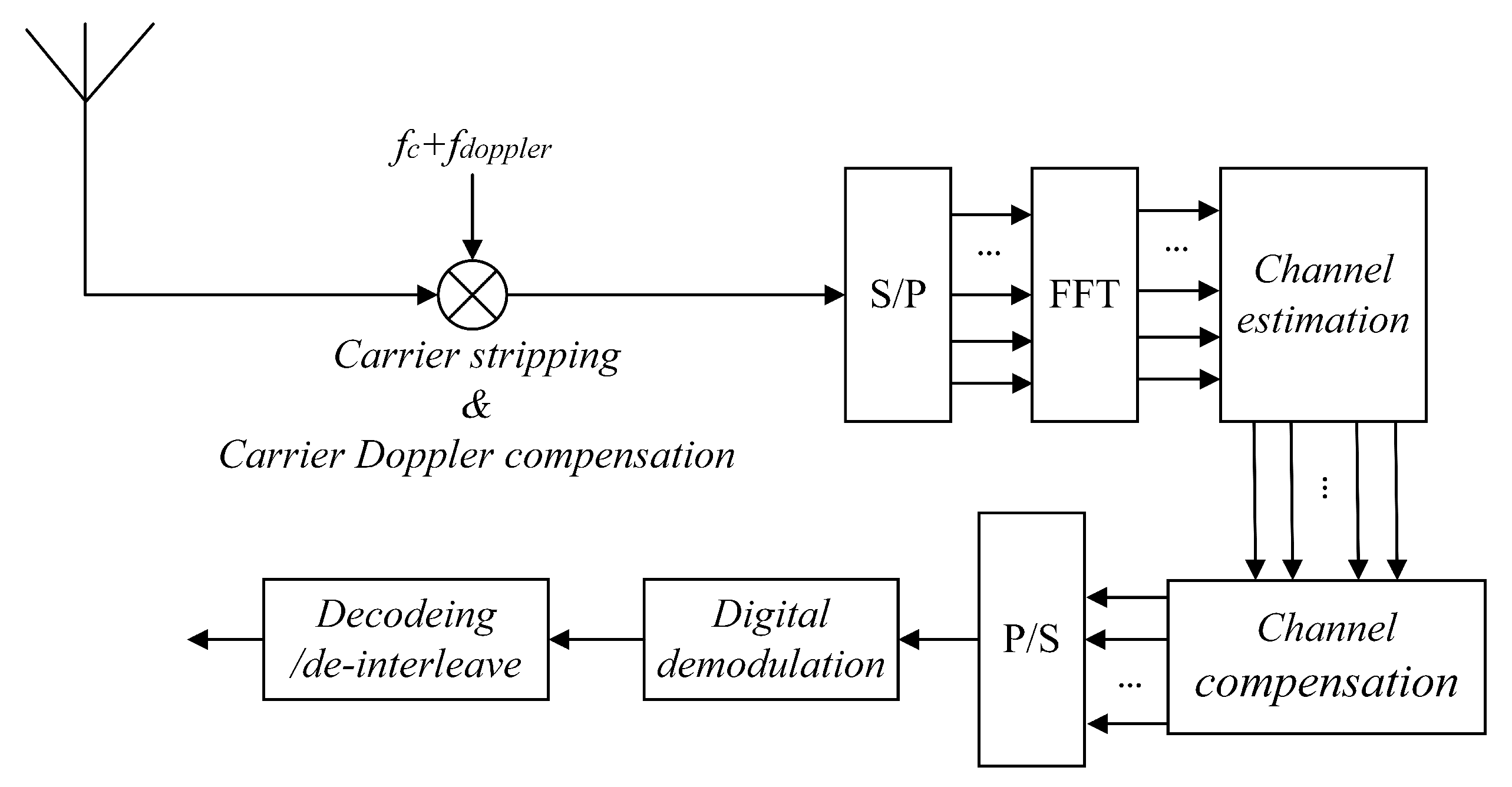
3.4. Demodulation of the OFDM Signal
4. Simulation Results and Performance Analysis
4.1. Channel Model
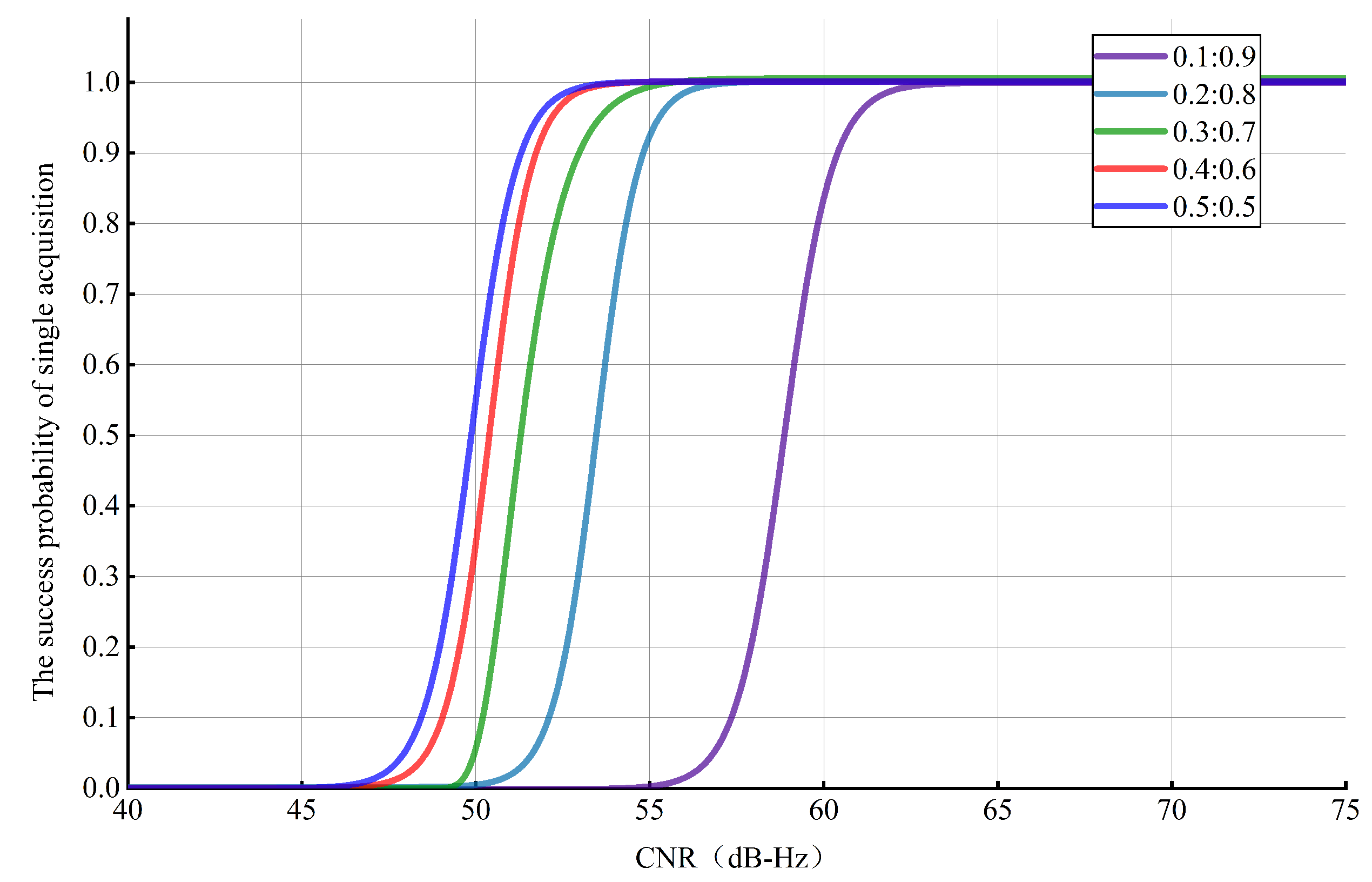
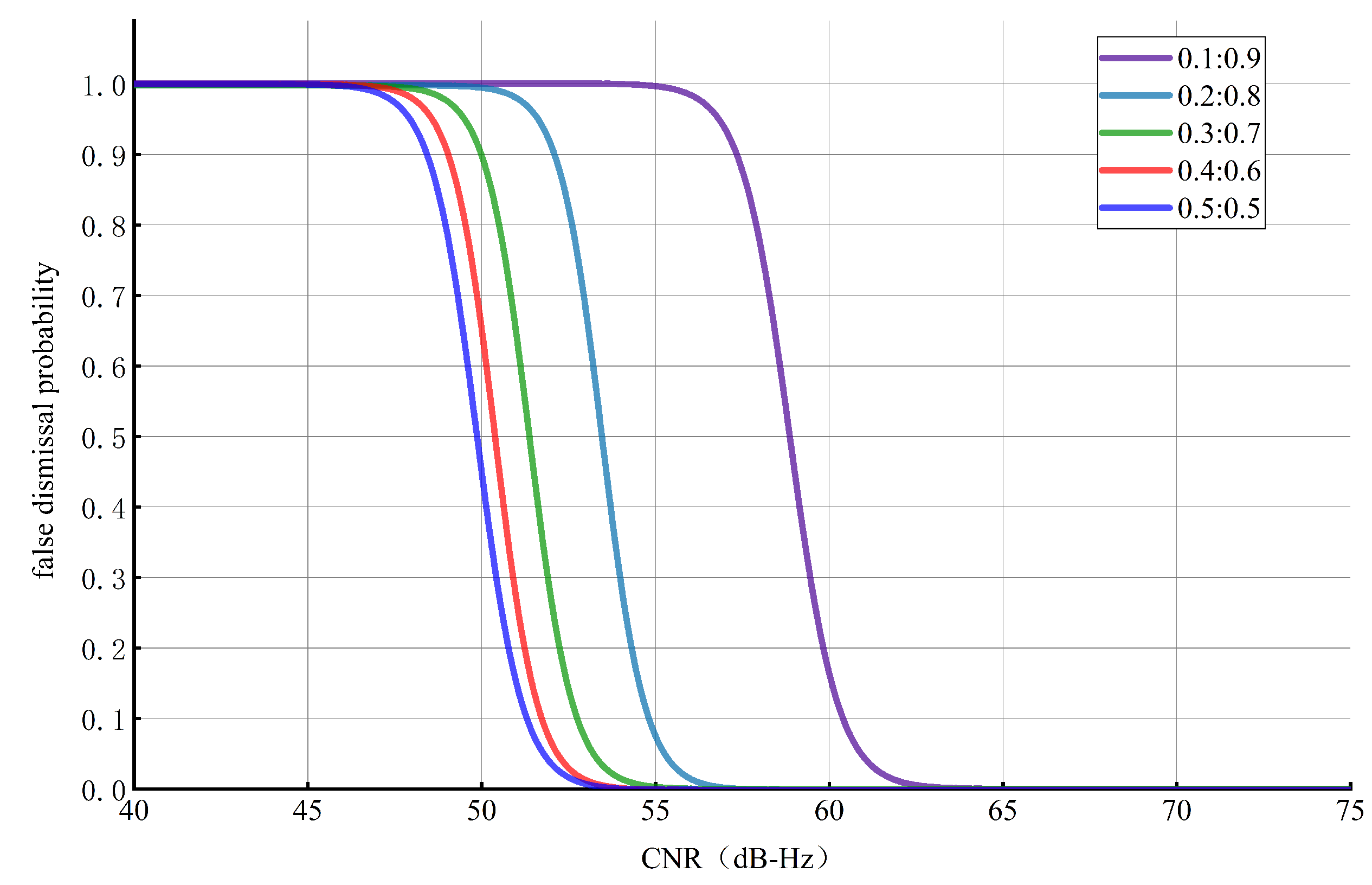
4.2. Acquisition Performance
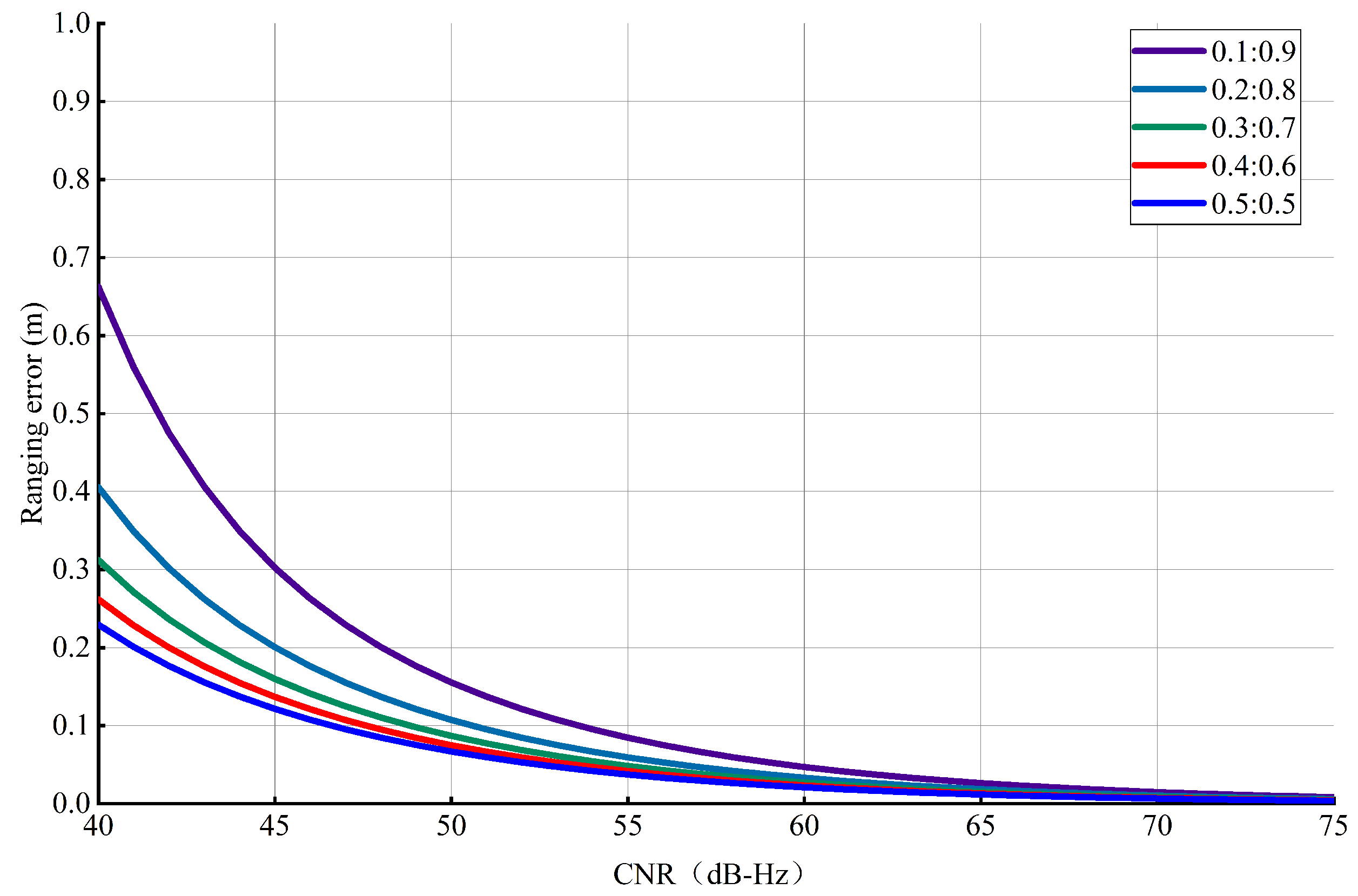
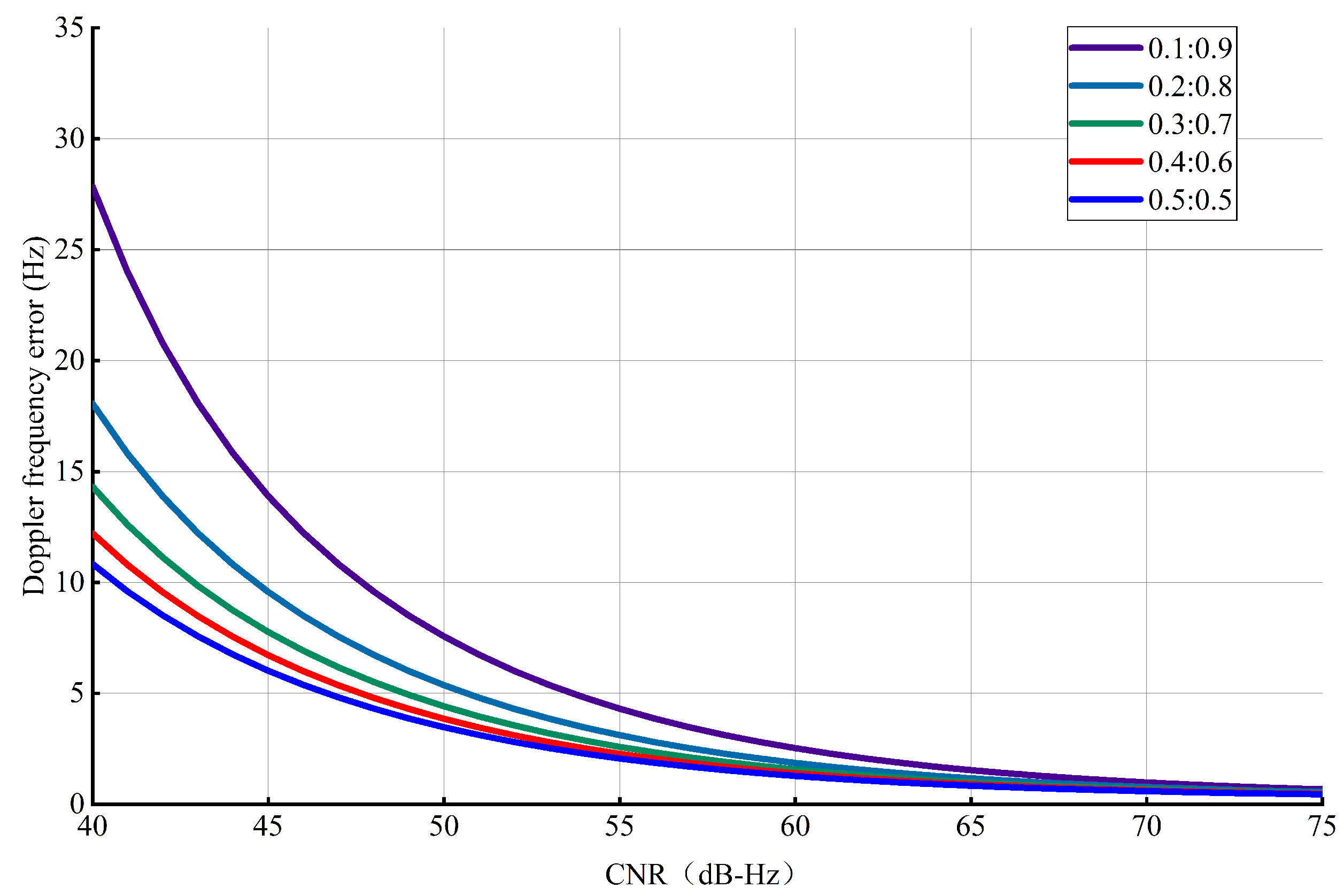
4.3. Tracking Performance
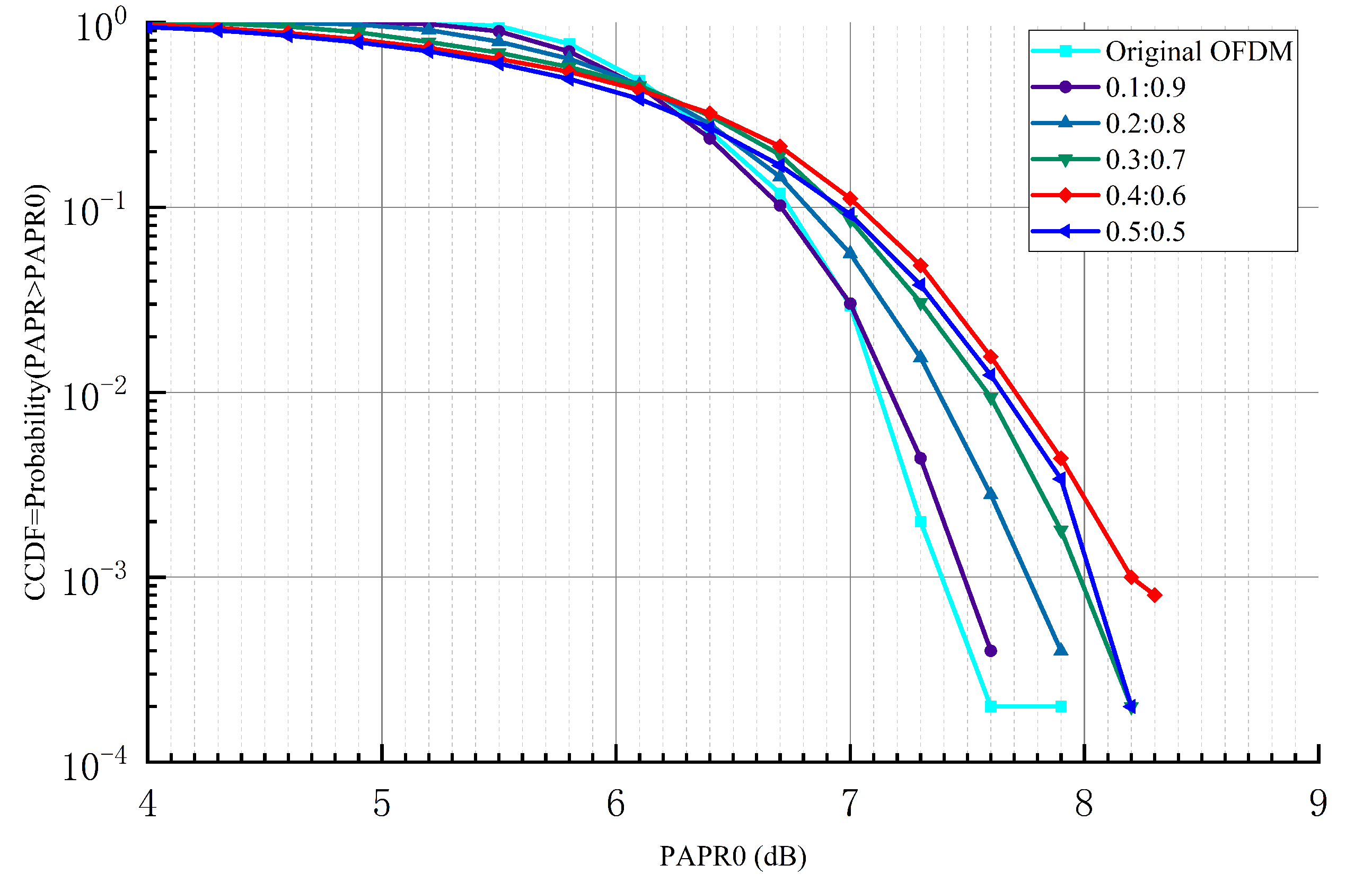
4.4. The Peak to Average Power Ratio (PAPR) Reduction Capacity of the Composite Signal
4.5. Demodulation Performance
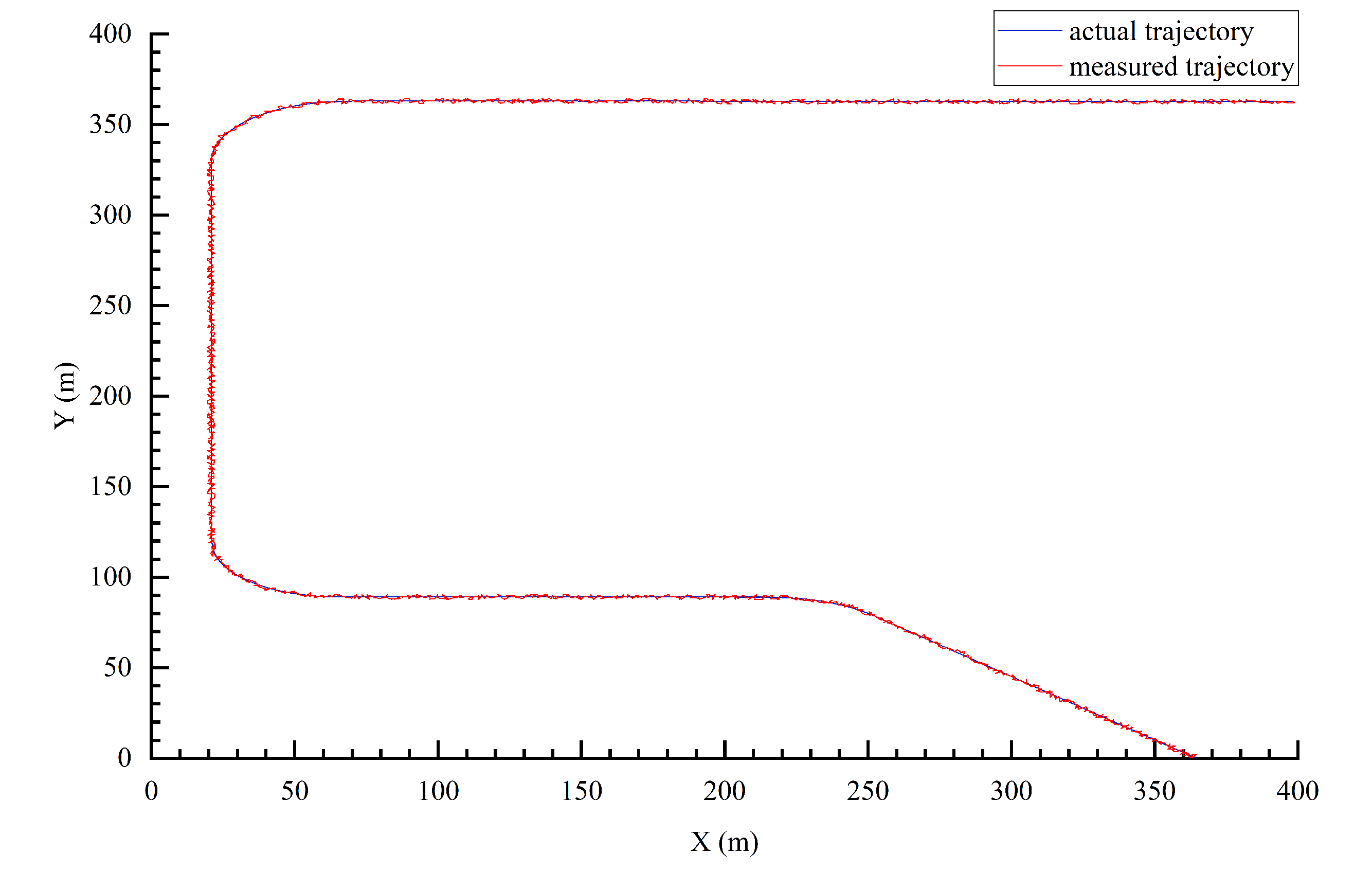
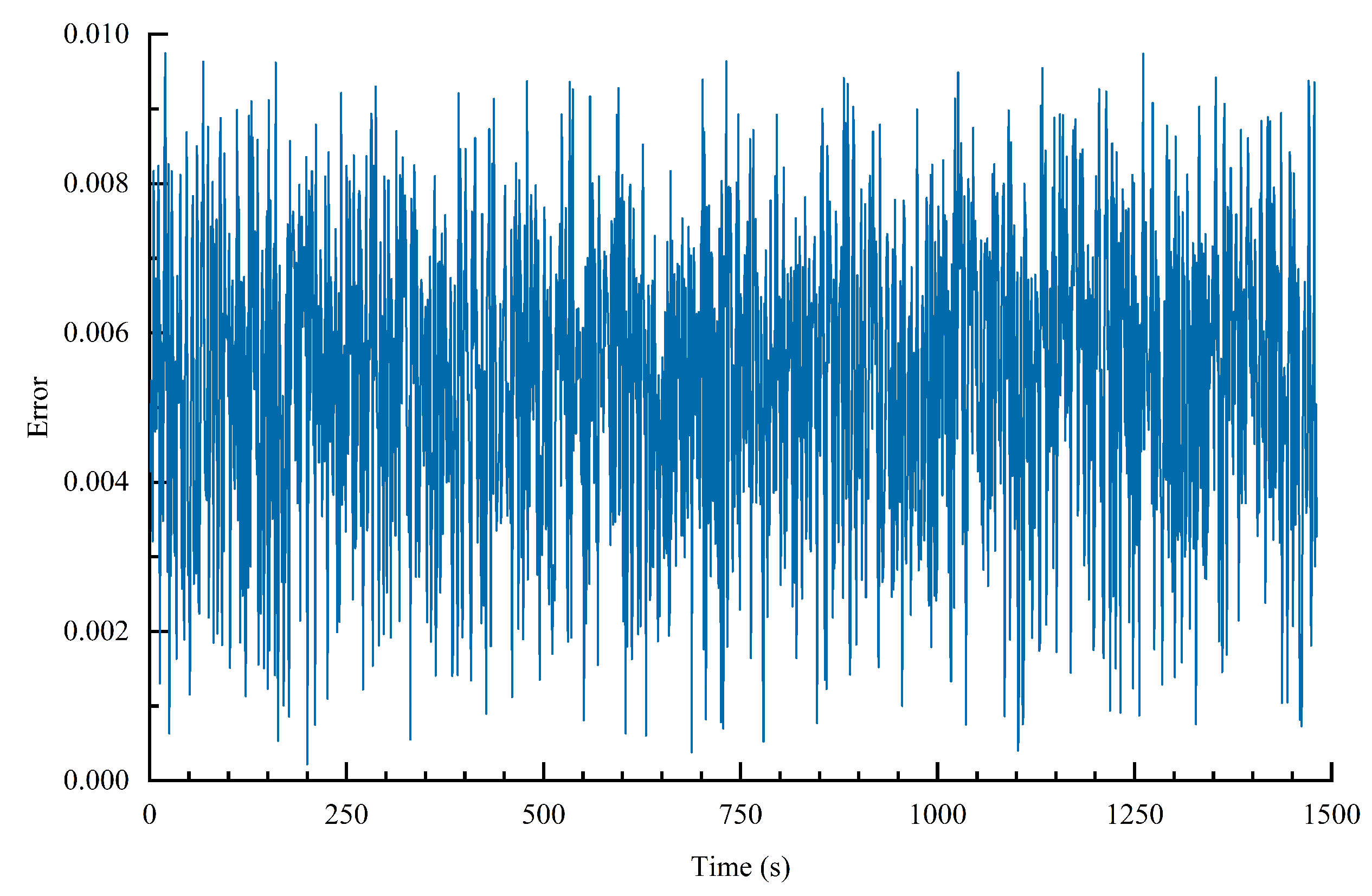
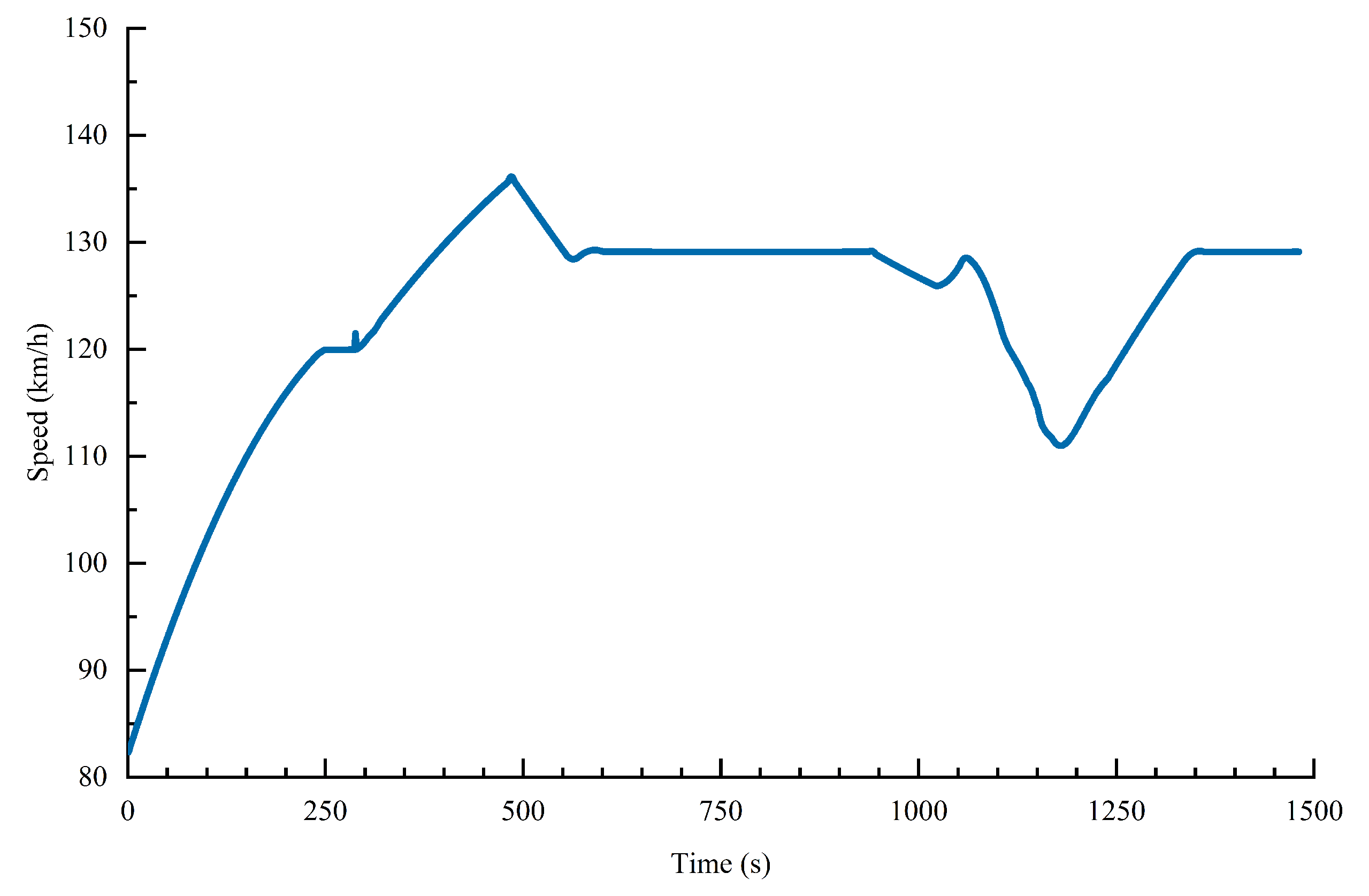
4.6. Actual Environment Simulation
5. Discussion
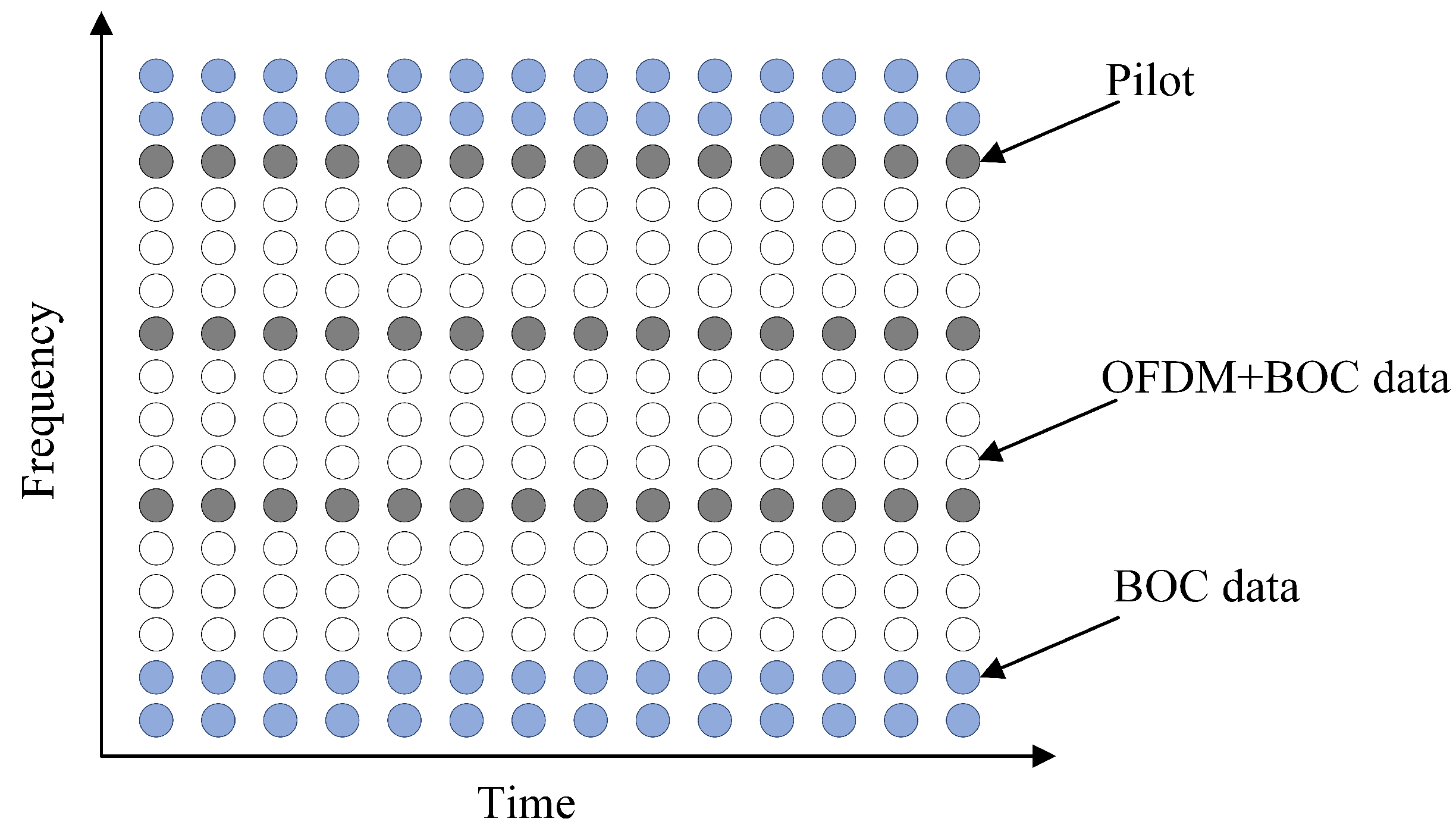
- The OFDM+BOC composite signal proposed in this paper can be used to perform high-speed communication and high-precision measurement at the same frequency. High data transmission is achieved by means of OFDM modulation, and high-precision measurement is achieved by means of BOC modulation.
- Based on the properties of BOC and OFDM signals, we present a reception process for the composite signal, including acquisition, tracking and demodulation. In the demodulation stage, we adopt the high-precision Doppler frequency offset tracked by the BOC signal to assist in the demodulation of the OFDM signal. Thus, the influence of the Doppler frequency offset on the OFDM signal is significantly reduced, and the communication performance is improved.
- The acquisition and tracking performance under different conditions is simulated. The results suggest that the acquisition and tracking performance for the BOC signal is not affected by the power ratios when . Moreover, a significant improvement in the measurement accuracy is achieved.
- Furthermore, the high-precision Doppler frequency offset tracked by the BOC signal is adopted for carrier Doppler compensation to assist in the demodulation of the OFDM signal. We compare the communication performance with carrier Doppler compensation to that with channel compensation. In a low-speed mobile environment, the BER of the composite signal with carrier Doppler compensation is almost two orders of magnitude lower than that with channel compensation. In a high-speed mobile environment, the composite signal can no longer be correctly demodulated with only channel compensation, whereas the BER of the composite signal with carrier Doppler compensation is still below . This proves that the carrier Doppler compensation method proposed in this paper can greatly reduce the impact of the Doppler frequency offset on OFDM signal and improve the communication performance of UAVs in high-speed mobile environments.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| OFDM | Orthogonal Frequency Division Multiplexing |
| TC-OFDM | Time and Code Division-Orthogonal Frequency Division Multiplexing |
| PHY | Physical Layer |
| MB-OFDM | Multiband Orthogonal Frequency Division Multiplexing |
| TDOA | Time Difference of Arrival |
| BPSK | Binary Phase Shift Keying |
| BOC | Binary Offset Carrier |
| GPS | Global Positioning System |
| BDS | Beidou Navigation System |
| CNR | Carrier to Noise Ratio |
| S/P | Serial to Parallel |
| IFFT | Inverse Fast Fourier Transform |
| QPSK | Quadrature Phase Shift Keying |
| FFT | Fast Fourier Transform |
| P/S | Parallel to Serial |
| BER | Bit Error Rate |
| SPLL | Subcarrier Phase Locked Loop |
| NCO | Numerically Controlled Oscillator |
| FLL | Frequency-Locked Loop |
| PLL | Phase-Locked Loop |
| DLL | Delay-locked Loop |
| LS | Least Squares |
| AWGN | Additive White Gaussian Noise |
| SNR | Signal-to-Noise Ratio |
| PAPR | Peak-to-Average Power Ratio |
| CCDF | Complementary Cumulative Distribution Function |
References
- Ye, L.; Yang, Y.; Ma, J.; Deng, L.; Li, H. A Distributed Formation Joint Network Navigation and Positioning Algorithm. Mathematics 2022, 10, 1627. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Ma, J.; Deng, L.; Li, H. Single-Satellite Integrated Navigation Algorithm Based on Broadband LEO Constellation Communication Links. Remote Sens. 2021, 13, 703. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Altimeter + INS/Giant LEO Constellation Dual-Satellite Integrated Navigation and Positioning Algorithm Based on Similar Ellipsoid Model and UKF. Remote Sens. 2021, 13, 4099. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation. Remote Sens. 2021, 13, 3312. [Google Scholar] [CrossRef]
- Ye, L.; Gao, N.; Yang, Y.; Li, X. A High-Precision and Low-Cost Broadband LEO 3-Satellite Alternate Switching Ranging/INS Integrated Navigation and Positioning Algorithm. Drones 2022, 6, 241. [Google Scholar] [CrossRef]
- Deng, Z.; Yu, Y.; Yuan, X.; Wan, N.; Yang, L. Situation and Development Tendency of Indoor Positioning. China Commun. 2013, 10, 42–55. [Google Scholar] [CrossRef]
- Ohhikata, Y.; Kobayashi, T. Proposal for an MB-OFDM UWB System Simultaneously Undertaking Ranging and Communications. In Proceedings of the 2005 IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2005; pp. 604–608. [Google Scholar] [CrossRef]
- Dun, H.; Tiberius, C.J.M.; Janssen, G.J.M. Positioning in a Multipath Channel Using OFDM Signals With Carrier Phase Tracking. IEEE Access 2020, 8, 13011–13028. [Google Scholar] [CrossRef]
- Su, J.; Su, J.; Yi, Q.; WU, C.; Hou, W. Design and performance evaluation of a novel ranging signal based on an LEO satellite communication constellation. Geo-Spat. Inf. Sci. 2022, 11, 1–18. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Real-Time Distance Evaluation System for Wireless Localization. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 3320–3330. [Google Scholar] [CrossRef]
- Zhang, Z.; Kang, S.; Zhang, X. Indoor Carrier Phase Positioning Technology Based on OFDM System. Sensors 2021, 21, 6731. [Google Scholar] [CrossRef]
- Ma, J.; Yang, Y.; Li, H.; Li, J. FH-BOC: Generalized low-ambiguity anti-interference spread spectrum modulation based on frequency-hopping binary offset carrier. GPS Solut. 2020, 24, 70. [Google Scholar] [CrossRef]
- He, T.; Ma, Z. Proposed OFDM Modulation for Future Generations of GNSS Signal System. J. Navig. 2016, 69, 971–990. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Yang, Y.; Li, H.; Li, J. Expressions for the Autocorrelation Function and Power Spectral Density of BOC Modulation Based on Convolution Operation. Math. Probl. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Betz, J. Binary Offset Carrier Modulation for Radionavigation. Navig. J. Inst. Navig. 2001, 48, 227–246. [Google Scholar] [CrossRef]
- Luo, X.; Schaufler, S.; Branzanti, M.; Chen, J. Assessing the benefits of Galileo to high-precision GNSS positioning-RTK, PPP and post-processing. ScienceDirect 2021, 12, 4916–4931. [Google Scholar] [CrossRef]
- Betz, J. The Offset Carrier Modulation for GPS Modernization. In Proceedings of the 1999 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 25–27 January 1999; pp. 639–648. [Google Scholar]
- Kaiser, S.; Christianson, A.; Narayanan, M. Multistatic Doppler Estimation Using Global Positioning System Passive Coherent Location. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2978–2991. [Google Scholar] [CrossRef]
- Lu, J.; Guo, X.; Su, C. Global capabilities of BeiDou Navigation Satellite System. Satell. Navig. 2020, 1, 1–5. [Google Scholar] [CrossRef]
- Xue, L.; Li, X.; Wu, W.; Dong, J. Multifunctional Signal Design for Measurement, Navigation and Communication Based on BOC and BPSK Modulation. Remote Sens. 2022, 14, 1653. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Deng, L.; Ye, L.; Li, Z.; Xiao, Y.; Dong, W. Design and Performance Analysis of Navigation Signal Based on OFDM. Appl. Sci. 2022, 12, 9486. [Google Scholar] [CrossRef]
- Nguyen, V.; Thi, H.; Nguyen, Q.; Nguyen, T. Low Complexity Non-Uniform FFT for Doppler Compensation in OFDM-Based Underwater Acoustic Communication Systems. IEEE Access 2022, 10, 82788–82798. [Google Scholar] [CrossRef]
- Han, Q.; Zhu, K.; Hu, C.; Zhao, H.; Wu, S.; Fu, Y. BOC Signal Acquisition Algorithm Based on Similar Enfoldment. Int. J. Aerosp. Eng. 2020, 2020, 1–19. [Google Scholar] [CrossRef]
- Wang, E.; Zhao, H.; Lin, D.; Wang, J.; Liu, M. An improved method for eliminating deputy peak of BOC navigation signal. IEICE Commun. Express 2022, 11, 589–595. [Google Scholar] [CrossRef]
- Xiong, X. Signal Modulation System Analysis of Acquisition and Tracking under High Dynamic Conditions. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 510–513. [Google Scholar] [CrossRef]
- Chen, L.; Zhao, W.; Xie, X.; Zhao, D.; Huang, S. Harmonic Phasor Estimation Based on Frequency-Domain Sampling Theorem. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- Ma, J.; Yang, Y. A Generalized Anti-Interference Low-Ambiguity Dual-Frequency Multiplexing Modulation Based on the Frequency-Hopping Technique. IEEE Access 2020, 8, 95288–95300. [Google Scholar] [CrossRef]
- Tang, P.; Li, X.; Wang, S.; Wang, K. A Low Complexity Algorithm for Code Doppler Compensation Using FFT-Based Parallel Acquisition Architecture. In Proceedings of the 9th China Satellite Navigation Conference (CSNC)—Location, Time of Augmentation, Harbin, China, 23–25 May 2018; pp. 355–364. [Google Scholar] [CrossRef]
- Li, T.; Tang, Z.; Wei, J.; Zhou, Z.; Wang, B. Unambiguous Tracking Technique Based on Combined Correlation Functions for Sine BOC Signals. J. Navig. 2019, 72, 140–154. [Google Scholar] [CrossRef]
- Ji, Y.; Chen, X.; Fu, Q.; Sun, X.; Zhen, W. Reconstruction of sub cross-correlation cancellation technique for unambiguous acquisition of BOC(kn, n) signals. J. Syst. Eng. Electron. 2019, 30, 852–860. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Rao, Y.; Shi, H.; Lu, X.; Kang, L.; Wang, X.; He, C.; Wang, M. Quality Assessment of Galileo E1A Signal. In Proceedings of the 10th China Satellite Navigation Conference (CSNC), Beijing, China, 22–25 May 2019; pp. 410–420. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, X.; Chen, X.; Li, S. A Novel Combined Control Loop Based on FLL-Assisted-PLL for Highly Dynamic Tracking. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin, China, 28 June–2 July 2021; pp. 1742–1747. [Google Scholar] [CrossRef]
- Li, W.; Qu, D.; Jiang, T. An Efficient Preamble Design Based on CombType Pilots for Channel Estimation in FBMC/OQAM Systems. IEEE Access 2018, 6, 64698–64707. [Google Scholar] [CrossRef]
- Xu, P.; Jia, Y. SNR improvement based on piecewise linear interpolation. J. Electr. Eng. 2021, 72, 348–351. [Google Scholar] [CrossRef]
- Rougerie, S.; Deloues, T.; Israel, J. A New Doppler model for LMS Channel. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Carrier frequency, | 10.23 MHz |
| BOC subcarrier frequency, | 4.096 MHz |
| Number of OFDM subcarriers, | 16 |
| Sampling frequency, | 80 MHz |
| Coding frequency, | 1.023 MHz |
| Range of the Doppler frequency offset, | −1–1 kHz |
| Pilot pattern | Comb-type pilots(with intervals of 3 subcarriers) |
| Channel model | Jakes & AWGN |
| Bandwidth | 8.092 MHz |
| Cyclic-prefix length | 7.8 μs |
| Data rate | 0.628 Mbps |
| FLL bandwidth | 20 Hz |
| PLL bandwidth | 10 Hz |
| SPLL bandwidth | 2 Hz |
| DLL bandwidth | 2 Hz |
| DLL correlator spacing | 0.5 chip |
| Loop update time | 1 ms |
| SNR | Yes or No | BER | |
|---|---|---|---|
| Yes | |||
| No | |||
| Yes | |||
| No | |||
| Yes | |||
| No | |||
| Yes | |||
| No | |||
| Yes | |||
| No | |||
| Yes | |||
| No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zeng, X.; Xue, L. Integrated Communication and Measurement System with BOC-Assisted OFDM. Drones 2023, 7, 14. https://doi.org/10.3390/drones7010014
Li X, Zeng X, Xue L. Integrated Communication and Measurement System with BOC-Assisted OFDM. Drones. 2023; 7(1):14. https://doi.org/10.3390/drones7010014
Chicago/Turabian StyleLi, Xue, Xiaolin Zeng, and Linshan Xue. 2023. "Integrated Communication and Measurement System with BOC-Assisted OFDM" Drones 7, no. 1: 14. https://doi.org/10.3390/drones7010014
APA StyleLi, X., Zeng, X., & Xue, L. (2023). Integrated Communication and Measurement System with BOC-Assisted OFDM. Drones, 7(1), 14. https://doi.org/10.3390/drones7010014