
Warehouse Drone: Indoor Positioning and Product Counter with Virtual Fiducial Markers


Abstract
:1. Introduction
- A solution is presented for the problem of indoor 3D positioning and pose prediction for low-cost and high-performance indoor positioning.
- The proposed method allows for more accurate location prediction compared to existing methods, including the calculation of the theta angle for position prediction of the aircraft.
- The system enables autonomous navigation of the entire warehouse area, recognition of racks, reading of barcodes on shelves, and product counting.
- A novel drone application for warehouse automation is proposed as an alternative to systems such as flying autonomous guided vehicles.
2. Materials and Methods
2.1. Simulation Environment and Data Collection
2.2. Detection of Fiducial Markers and Placement in the Simulation Environment
2.3. Machine Learning Algorithms and Regression
- ArUco ID: Each ArUco beacon has a unique identifier code that can be read by a machine learning algorithm, allowing it to distinguish one beacon from another. This is especially useful for applications where multiple markers need to be defined and tracked simultaneously.
- ArUco Area: ArUco markers come in a variety of sizes allowing them to be used in a variety of applications. This is particularly useful for applications where markers must be placed in different environments, as different marker sizes can be used to optimize detection performance. Markers were added to the dimensions of 20 × 20 cm in the study. However, the areas of these markers in pixels vary according to their distance from the camera.
- ArUco Camera Coordinates: These are the vertical and horizontal axis coordinates of the center of the marker, in pixels, when ArUco markers are detected on the camera.
2.3.1. Regression Algorithms
K-Nearest Neighbor
Adaptive Boosting
Random Forest
Extreme Gradient Boosting (XGBoost)
Artificial Neural Networks-Multilayer Perceptron
2.3.2. Performance Evaluation and Model Selection
2.4. Warehouse Navigation and Rack Occupancy Detection Algorithm
3. Results and Discussion
3.1. Data Collection Findings and Evidence
3.1.1. X-Axis Positioning
3.1.2. Y-Axis Positioning
3.1.3. Z-Axis Positioning
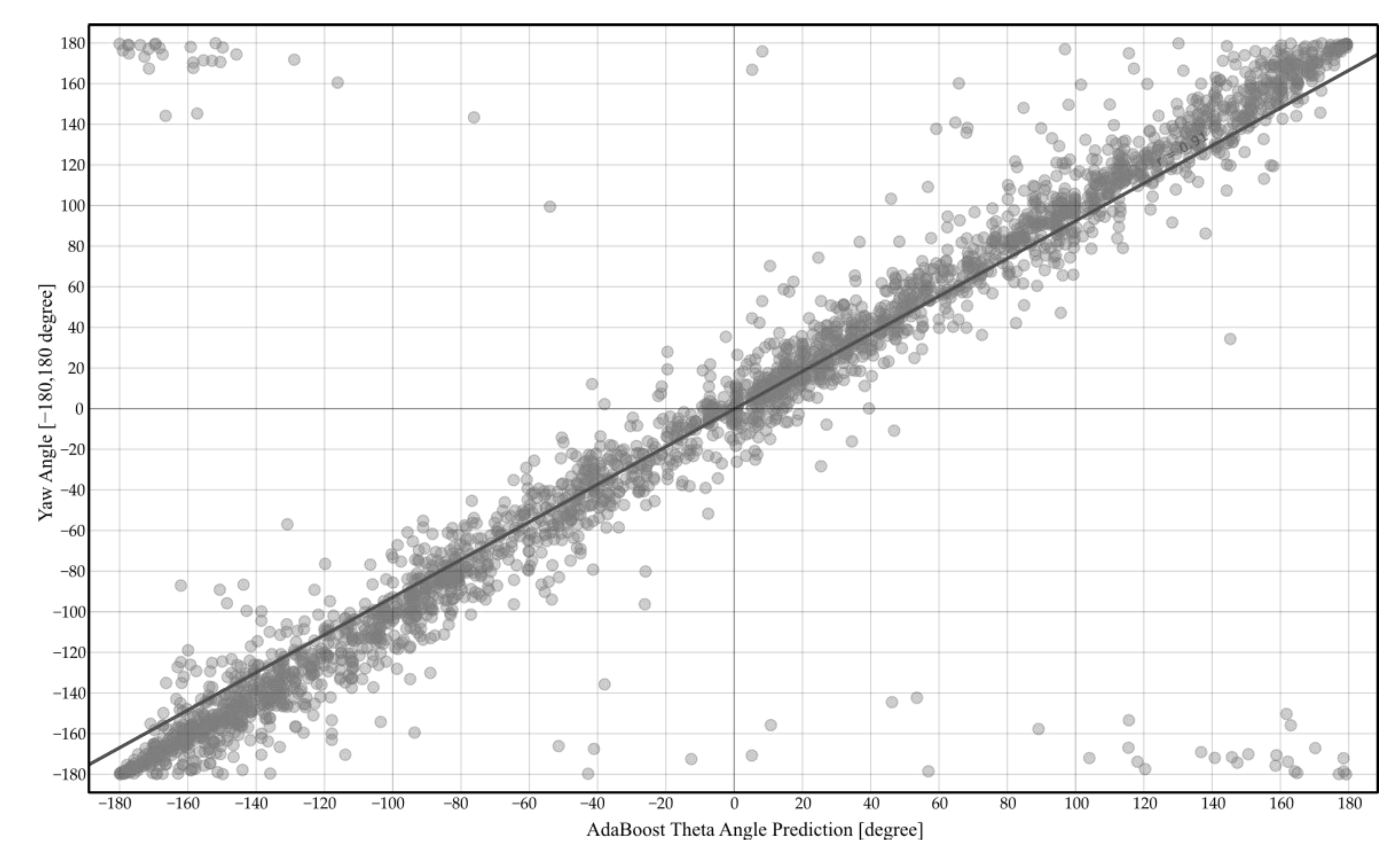
3.1.4. Theta Pose Prediction (YAW Angle)
3.2. Comparison of Proposed Method with Existing Systems
3.3. Warehouse Navigation and Rack Occupancy Detection
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Ayamga, M.; Tekinerdogan, B.; Kassahun, A.; Rambaldi, G. Developing a Policy Framework for Adoption and Management of Drones for Agriculture in Africa. Technol. Anal. Strateg. Manag. 2021, 33, 970–987. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted Applicability of Drones: A Review. Technol. Forecast. Soc. Chang. 2021, 167, 120677. [Google Scholar] [CrossRef]
- Gyagenda, N.; Hatilima, J.V.; Roth, H.; Zhmud, V. A Review of GNSS-Independent UAV Navigation Techniques. Robot. Auton. Syst. 2022, 152, 104069. [Google Scholar] [CrossRef]
- Borenstein, J.; Everett, H.R.; Feng, L.; Wehe, D. Mobile Robot Positioning: Sensors and Techniques. J. Robot. Syst. 1997, 14, 231–249. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. Syst. Man Cybern. Part C Appl. Rev. IEEE Trans. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Tarcai, N.; Szorenyi, T.; Nepusz, T.; Vicsek, T. Outdoor Flocking and Formation Flight with Autonomous Aerial Robots. In Proceedings of the Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway Township, NJ, USA; pp. 3866–3873. [Google Scholar]
- Quintero, S.; Collins, G.E.; Hespanha, J.P. Others Flocking with Fixed-Wing UAVs for Distributed Sensing: A Stochastic Optimal Control Approach. In Proceedings of the American Control Conference (ACC), Washington, DC, USA, 17–19 June 2013; pp. 2025–2031. [Google Scholar]
- Mautz, R. Overview of Current Indoor Positioning Systems. Geod. Kartogr. 2009, 35, 18–22. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zurich, Department of Civil, Environmental and Geomatic Engineering, Institute of Geodesy and Photogrammetry, Zürich Switzerland, 2012. [Google Scholar]
- Stirling, T.; Roberts, J.; Zufferey, J.-C.; Floreano, D. Indoor Navigation with a Swarm of Flying Robots. In Proceedings of the Robotics and Automation (ICRA), 2012 IEEE International Conference, Saint Paul, MN, USA, 14–18 May 2012; IEEE: Piscataway Township, NJ, USA; pp. 4641–4647. [Google Scholar]
- Scaramuzza, D.; Achtelik, M.C.; Doitsidis, L.; Friedrich, F.; Kosmatopoulos, E.; Martinelli, A.; Achtelik, M.W.; Chli, M.; Chatzichristofis, S.; Kneip, L. Vision-Controlled Micro Flying Robots: From System Design to Autonomous Navigation and Mapping in GPS-Denied Environments. IEEE Robot. Autom. Mag. 2014, 21, 26–40. [Google Scholar] [CrossRef]
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. Survey on UAV Navigation in GPS Denied Environments. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, 3–5 October 2016; pp. 198–204. [Google Scholar]
- Lu, Y.; Xue, Z.; Xia, G.-S.; Zhang, L. A Survey on Vision-Based UAV Navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Beard, R.W.; McLain, T.W.; Goodrich, M.A.; Anderson, E.P. Coordinated Target Assignment and Intercept for Unmanned Air Vehicles. Robot. Autom. IEEE Trans. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Wang, Y.-T. Obstacle Avoidance and Role Assignment Algorithms for Robot Formation Control. In Proceedings of the Intelligent Robots and Systems, 2007. IROS 2007. IEEE/RSJ International Conference, San Diego, CA, USA, 29 October–2 November 2007; IEEE: Piscataway Township, NJ, USA; pp. 4201–4206. [Google Scholar]
- Toner, J.; Tu, Y. Flocks, Herds, and Schools: A Quantitative Theory of Flocking. Phys. Rev. E 1998, 58, 4828. [Google Scholar] [CrossRef] [Green Version]
- Parker, L.E. Path Planning and Motion Coordination in Multiple Mobile Robot Teams. Encycl. Complex. Syst. Sci. 2009, 5783–5800. [Google Scholar]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A Comparison of Pedestrian Dead-Reckoning Algorithms Using a Low-Cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Do, T.-N.; Liu, R.; Yuen, C.; Zhang, M.; Tan, U.-X. Personal Dead Reckoning Using IMU Mounted on Upper Torso and Inverted Pendulum Model. IEEE Sens. J. 2016, 16, 7600–7608. [Google Scholar] [CrossRef]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU Dead-Reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Simultaneous Localization and Mapping. In Robotics and Cognitive Approaches to Spatial Mapping; Jefferies, M.E., Yeap, W.-K., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 13–41. ISBN 978-3-540-75388-9. [Google Scholar]
- Taheri, H.; Xia, Z.C. SLAM.; Definition and Evolution. Eng. Appl. Artif. Intell. 2021, 97, 104032. [Google Scholar] [CrossRef]
- Holmberg, M.; Karlsson, O.; Tulldahl, M. Lidar Positioning for Indoor Precision Navigation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2022; pp. 359–368. [Google Scholar]
- Seçkin, A.Ç. Pedestrian and Mobile Robot Detection with 2D LIDAR. EJOSAT 2021, 23, 583–588. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-Time Loop Closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Quan, S.; Chen, J. AGV Localization Based on Odometry and LiDAR. In Proceedings of the 2019 2nd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 22–24 November 2019; pp. 483–486. [Google Scholar]
- Veerannapeta, V. Low Power Indoor Robotic Vacuum Cleaner Using Sensors and SLAM. Int. Res. J. Innov. Eng. Technol. 2019, 3, 51. [Google Scholar]
- Xin, C.; Wu, G.; Zhang, C.; Chen, K.; Wang, J.; Wang, X. Research on Indoor Navigation System of Uav Based on Lidar. In Proceedings of the 2020 12th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Phuket, Thailand, 28–29 February 2020; pp. 763–766. [Google Scholar]
- Gümüşboğa, İ. İnsansız Hava Aracı Temelli Bir Otomatikleştirilmiş Stok Sayım Sistemi Tasarımı. Gazi Üniversitesi Mühendis. Mimar. Fakültesi Derg. 2022, 37, 1767–1782. [Google Scholar]
- Beinschob, P.; Reinke, C. Graph SLAM Based Mapping for AGV Localization in Large-Scale Warehouses. In Proceedings of the 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2015; pp. 245–248. [Google Scholar]
- Chen, Y.; Wu, Y.; Xing, H. A Complete Solution for AGV SLAM Integrated with Navigation in Modern Warehouse Environment. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 6418–6423. [Google Scholar]
- Moshayedi, A.J.; Jinsong, L.; Liao, L. AGV (Automated Guided Vehicle) Robot: Mission and Obstacles in Design and Performance. J. Simul. Anal. Nov. Technol. Mech. Eng. 2019, 12, 5–18. [Google Scholar]
- Wang, H.; Wang, C.; Chen, C.-L.; Xie, L. F-Loam: Fast Lidar Odometry and Mapping. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4390–4396. [Google Scholar]
- Gokula Vishnu Kirti, D.; Greesh Pranav, J.B.; Siva Naga Yaswanth, V.; Ponaka, A.R.; Arockia Dhanraj, J. Design and Development of Smart Multipurpose Automated Guided Vehicle Implemented with SLAM and AMCL. In Technology Innovation in Mechanical Engineering; Springer: Berlin/Heidelberg, Germany, 2022; pp. 469–481. [Google Scholar]
- Yazici, A.; Yayan, U.; Yücel, H. An Ultrasonic Based Indoor Positioning System. In Proceedings of the 2011 International Symposium on Innovations in Intelligent Systems and Applications, Istanbul, Turkey, 15–18 June 2011; pp. 585–589. [Google Scholar]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor Positioning: A Review of Indoor Ultrasonic Positioning Systems. In Proceedings of the 2013 15th International Conference on Advanced Communications Technology (ICACT), PyeongChang, Republic of Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Seçkin, A.Ç.; Coşkun, A. Hierarchical Fusion of Machine Learning Algorithms in Indoor Positioning and Localization. Appl. Sci. 2019, 9, 3665. [Google Scholar] [CrossRef] [Green Version]
- Alitaleshi, A.; Jazayeriy, H.; Kazemitabar, S.J. WiFi Fingerprinting Based Floor Detection with Hierarchical Extreme Learning Machine. In Proceedings of the 2020 10th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29–30 October 2020; pp. 113–117. [Google Scholar]
- Yamada, I.; Ohtsuki, T.; Hisanaga, T.; Zheng, L. An Indoor Position Estimation Method by Maximum Likelihood Algorithm Using RSS. In Proceedings of the SICE Annual Conference 2007, Takamatsu, Japan, 17–20 September 2007; pp. 2927–2930. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-Building RF-Based User Location and Tracking System. In Proceedings of the Proceedings IEEE INFOCOM 2000. Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Mogi, T.; Ohtsuki, T. TOA Localization Using RSS Weight with Path Loss Exponents Estimation in NLOS Environments. In Proceedings of the 2008 14th Asia-Pacific Conference on Communications, Akihabara, Japan, 14–16 October 2008; pp. 1–5. [Google Scholar]
- Chan, Y.-T.; Tsui, W.-Y.; So, H.-C.; Ching, P. Time-of-Arrival Based Localization under NLOS Conditions. IEEE Trans. Veh. Technol. 2006, 55, 17–24. [Google Scholar] [CrossRef]
- Yamashita, J.; Hiyama, A.; Amemiya, T.; Kobayashi, I.; Hirota, K.; Hirose, M. Construction of outdoor virtual research environment for wearable and mobile computers. Hum. Interface Soc. 2002, 4, 45–48. [Google Scholar]
- Kushleyev, A.; Mellinger, D.; Powers, C.; Kumar, V. Towards a Swarm of Agile Micro Quadrotors. Auton. Robots 2013, 35, 287–300. [Google Scholar] [CrossRef]
- Leica TS30. Available online: http://www.leica-geosystems.us/downloads123/zz/tps/TS30/brochures/TS30_Brochure_us.pdf (accessed on 20 September 2022).
- Vicon MX Systems. Available online: http://www.vicon.com/products (accessed on 12 September 2022).
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision Meets Robotics: The Kitti Dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Aqel, M.O.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of Visual Odometry: Types, Approaches, Challenges, and Applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef]
- Tiemann, J.; Wietfeld, C. Scalable and Precise Multi-UAV Indoor Navigation Using TDOA-Based UWB Localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Cheng, Y.; Zhou, T. UWB Indoor Positioning Algorithm Based on TDOA Technology. In Proceedings of the 2019 10th International Conference on Information Technology in Medicine and Education (ITME), Qingdao, China, 23–25 August 2019; pp. 777–782. [Google Scholar]
- Zhu, X.; Yi, J.; Cheng, J.; He, L. Adapted Error Map Based Mobile Robot UWB Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 6336–6350. [Google Scholar] [CrossRef]
- Zakiev, A.; Tsoy, T.; Shabalina, K.; Magid, E.; Saha, S.K. Virtual Experiments on ArUco and AprilTag Systems Comparison for Fiducial Marker Rotation Resistance under Noisy Sensory Data. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–6. [Google Scholar]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic Generation and Detection of Highly Reliable Fiducial Markers under Occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Nogar, S.M. Autonomous Landing of a UAV on a Moving Ground Vehicle in a GPS Denied Environment. In Proceedings of the 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 77–83. [Google Scholar]
- Kato, H.; Billinghurst, M.; Poupyrev, I. ARToolKit Version 2.33. Hum. Interface Lab Univ. Wash. 2000, 2, 65. [Google Scholar]
- Wang, Y.; Zheng, Z.; Su, Z.; Yang, G.; Wang, Z.; Luo, Y. An Improved ArUco Marker for Monocular Vision Ranging. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 2915–2919. [Google Scholar]
- Masand, B.; Linoff, G.; Waltz, D. Classifying News Stories Using Memory Based Reasoning. In Proceedings of the 15th Annual International ACM SIGIR Conference on Research and Development in Information Retrieval, Copenhagen, Denmark, 21–24 June 1992; Association for Computing Machinery: New York, NY, USA, 1992; pp. 59–65. [Google Scholar]
- Altman, N.S. An Introduction to Kernel and Nearest-Neighbor Nonparametric Regression. Am. Stat. 1992, 46, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Freund, Y.; Schapire, R.E. Experiments with a New Boosting Algorithm. In Machine Learning: Proceedings of the Thirteenth International Conference, Bari, Italy, 3–6 July 1996; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1996; Volume 96, pp. 148–156. [Google Scholar]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of on-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Bertoni, A.; Campadelli, P.; Parodi, M. A Boosting Algorithm for Regression. In Proceedings of the International Conference on Artificial Neural Networks, Lausanne, Switzerland, 8–10 October 1997; Springer: Berlin/Heidelberg, Germany, 1997; pp. 343–348. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Liaw, A.; Wiener, M. Classification and Regression by RandomForest. R News 2002, 2, 18–22. [Google Scholar]
- Akman, M.; Genç, Y.; Ankarali, H. Random Forests Yöntemi ve Sağlık Alanında Bir Uygulama. Turk. Klin. J. Biostat. 2011, 3, 36–48. [Google Scholar]
- Adithya, V.; Deepak, G. HBlogRec: A Hybridized Cognitive Knowledge Scheme for Blog Recommendation Infusing XGBoosting and Semantic Intelligence. In Proceedings of the 2021 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 9–11 July 2021; pp. 1–6. [Google Scholar]
- Da Silva, I.N.; Hernane Spatti, D.; Andrade Flauzino, R.; Liboni, L.H.B.; dos Reis Alves, S.F. Artificial Neural Networks; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-43161-1. [Google Scholar]
- Magree, D.; Johnson, E.N. Combined Laser and Vision-Aided Inertial Navigation for an Indoor Unmanned Aerial Vehicle. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1900–1905. [Google Scholar]
- Seçkin, A.Ç. Adaptive Positioning System Design Using AR Markers and Machine Learning for Mobile Robot. In Proceedings of the 2020 5th International Conference on Computer Science and Engineering (UBMK), Diyarbakir, Turkey, 9–11 September 2020; pp. 160–164. [Google Scholar]
- Marasigan, R.I.; Austria, Y.D.; Enriquez, J.B.; Lolong Lacatan, L.; Dellosa, R.M. Unmanned Aerial Vehicle Indoor Navigation Using Wi-Fi Trilateration. In Proceedings of the 2020 11th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2020; pp. 346–351. [Google Scholar]
- Khalaf-Allah, M. Particle Filtering for Three-Dimensional TDoA-Based Positioning Using Four Anchor Nodes. Sensors 2020, 20, 4516. [Google Scholar] [CrossRef] [PubMed]
- Alpaydin, E. Introduction to Machine Learning; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model Evaluation Guidelines for Systematic Quantification of Accuracy in Watershed Simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Willmott, C.J. Some Comments on the Evaluation of Model Performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Equation |
|---|---|
| Mean Absolute Error (MAE) | |
| R Coefficient of Determination (R-Square, R²) |
| Model | Time [s] | Regression Metric | ||
|---|---|---|---|---|
| Train | Test | MAE | R2 | |
| AdaBoost | 20.441 | 0.258 | 0.105 | 0.991 |
| MLP | 31.193 | 0.080 | 0.230 | 0.983 |
| K-NN | 0.105 | 0.632 | 0.237 | 0.976 |
| RF | 1.420 | 0.044 | 0.239 | 0.974 |
| XGBoost | 1.325 | 0.027 | 0.383 | 0.966 |
| Model | Time [s] | Regression Metric | ||
|---|---|---|---|---|
| Train | Test | MAE | R2 | |
| AdaBoost | 20.402 | 0.252 | 0.109 | 0.976 |
| MLP | 50.223 | 0.073 | 0.200 | 0.973 |
| K-NN | 0.102 | 0.606 | 0.232 | 0.953 |
| RF | 1.455 | 0.035 | 0.234 | 0.956 |
| XGBoost | 1.293 | 0.020 | 0.328 | 0.946 |
| Model | Time [s] | Regression Metric | ||
|---|---|---|---|---|
| Train | Test | MAE | R2 | |
| AdaBoost | 23.724 | 0.253 | 0.014 | 0.979 |
| MLP | 33.042 | 0.066 | 0.062 | 0.968 |
| K-NN | 1.306 | 0.019 | 0.047 | 0.966 |
| RF | 3.654 | 0.093 | 0.038 | 0.964 |
| XGBoost | 0.105 | 0.650 | 0.096 | 0.795 |
| Model | Time [s] | Regression Metric | ||
|---|---|---|---|---|
| Train | Test | MAE | R2 | |
| AdaBoost | 15.605 | 0.214 | 14.956 | 0.816 |
| RF | 01.281 | 0.035 | 19.616 | 0.814 |
| XGBoost | 01.427 | 0.020 | 22.731 | 0.810 |
| MLP | 39.649 | 0.067 | 22.642 | 0.783 |
| K-NN | 00.112 | 0.593 | 22.213 | 0.762 |
| Reference | Positioning Method | Task Dimensions (m) | Task Area (m2) | Minimum Error in x or y Axis (cm) | Error (m)/Task Area (m2) | ||
|---|---|---|---|---|---|---|---|
| x Axis | y Axis | z Axis | |||||
| [70] | ArUco | 0.80 | 1.00 | - | 0.8000 | 0.89 | 0.011125 |
| [31] | UWB | 4.75 | 4.36 | 2.66 | 20.7100 | 0.26 | 0.000126 |
| [72] | UWB | 10.00 | 10.00 | 10.00 | 100.0000 | 11.00 | 0.001100 |
| [71] | Wi-Fi | 15.24 | 15.24 | - | 232.2576 | 43.00 | 0.001851 |
| [69] | Computer Vision and IMU | 3.65 | 3.65 | - | 13.3225 | 30.00 | 0.022518 |
| [51] | UWB | 1.80 | 3.60 | - | 6.4800 | 4.00 | 0.006173 |
| Proposed Method | ArUco and IMU | 10.00 | 15.00 | 5.00 | 150.0000 | 15.20 | 0.001013 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ekici, M.; Seçkin, A.Ç.; Özek, A.; Karpuz, C. Warehouse Drone: Indoor Positioning and Product Counter with Virtual Fiducial Markers. Drones 2023, 7, 3. https://doi.org/10.3390/drones7010003
Ekici M, Seçkin AÇ, Özek A, Karpuz C. Warehouse Drone: Indoor Positioning and Product Counter with Virtual Fiducial Markers. Drones. 2023; 7(1):3. https://doi.org/10.3390/drones7010003
Chicago/Turabian StyleEkici, Murat, Ahmet Çağdaş Seçkin, Ahmet Özek, and Ceyhun Karpuz. 2023. "Warehouse Drone: Indoor Positioning and Product Counter with Virtual Fiducial Markers" Drones 7, no. 1: 3. https://doi.org/10.3390/drones7010003
APA StyleEkici, M., Seçkin, A. Ç., Özek, A., & Karpuz, C. (2023). Warehouse Drone: Indoor Positioning and Product Counter with Virtual Fiducial Markers. Drones, 7(1), 3. https://doi.org/10.3390/drones7010003