
Model Predictive Control Technique for Ducted Fan Aerial Vehicles Using Physics-Informed Machine Learning


Abstract
:1. Introduction
1.1. Literature Review
1.2. Contributions
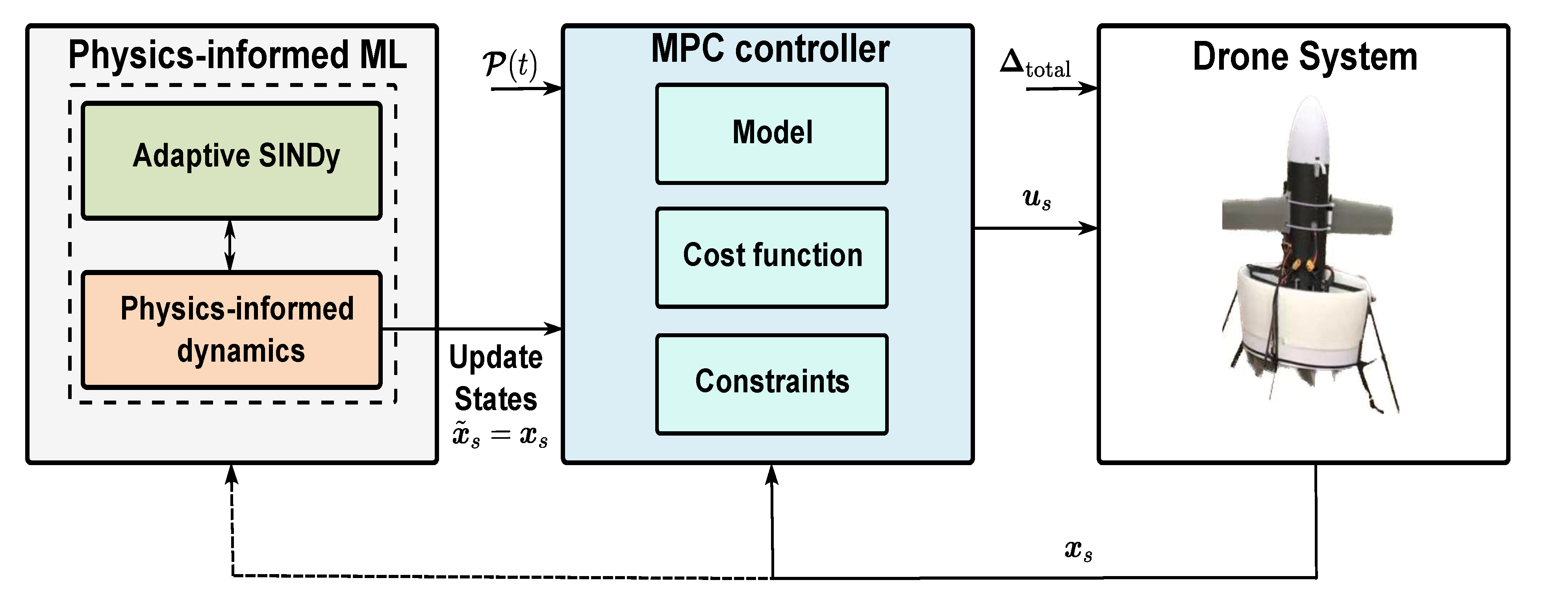
- To fully exploit the potential of MPC, an online-based predictive control algorithm using physics-informed ML without the utilization of DOB is presented, unlike [15,16,17]. By employing the methodology in such a way, the inherent issues encountered in the disturbance rejection MPC framework [16,17] can be solved.
- For efficient response and to avoid any usual computational complexity problem, only the data-driven part in the hybrid modeling is determined online for model correction. To further enhance the computational efficiency of the developed control algorithm, the physics-informed model is also updated by the physics-informed ML model in each step while solving the optimization problem.
- In contrast to the existing disturbance rejection framework [16], the designed approach demonstrates effective performance. Furthermore, the constructed approach can be implemented in other robotics systems to attain similar goals.
1.3. Organization
1.4. Notation
2. Problem Formulation
2.1. Physics-Informed Modelling
2.2. Data-Driven ML-Adaptive SINDy
- Modification: If the whole model is unchanged except for model parameters, then least square regression will be employed on the known model to find new parameters;
- Deletion: If a few terms are removed, then sparse regression can be utilized on the sparse coefficients to identify which terms have been taken out;
- Addition: To find the model error, the SINDy regression will identify the sparsest combination of inactive terms.
2.2.1. Baseline Model
2.2.2. Estimation of Model Divergence
2.2.3. Adaptive Model Recovery
2.3. Control Objective
3. Control Framework
| Algorithm 1: MPC-based control using physics-informed ML |
 |
4. Comparative Analysis
4.1. Simulation Studies
- Case (1): Performance in the presence of parametric uncertainties;
- Case (2): Performance in the presence of parametric uncertainties and disturbances;
- Case (3): Performance in the presence of faults, model uncertainties and disturbances.
4.1.1. Case(1): Trajectory Tracking Response under Model Uncertainties
4.1.2. Case(2): Trajectory Tracking Response under Uncertainties and Disturbances
4.1.3. Case(3): Tracking Response in the Presence of Model Uncertainties, Disturbances, and Fault
4.1.4. Performance Analysis Based on Tracking Error and Computations
4.2. Discussion
5. Conclusions and Future Directions
- Physics-informed modeling: the designed model is basically derived from the principle of the Newton–Euler method. Other mathematical models, such as the Lagrange-Euler approach, can be employed;
- Data-driven ML: the developed ML scheme was inspired by adaptive SINDy [30], where different ways of improving the ML model’s capability can be explored. Moreover, further investigation is required to find an effective technique to enhance computational efficiency with more data and less physics;
- Real-time implementation: future work will involve real-time testing of the presented framework. For this purpose, a more suitable solver can be used for code generation especially developed for real-time embedded optimization.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DFAV | Ducted Fan Aerial Vehicle |
| DOB | Disturbance Observer |
| MPC | Model Predictive Control |
| MPC-CFC | MPC-based Compound Flight Control |
| MAE | Mean Absolute Error |
| ML | Machine Learning |
| NN | Neural Network |
| SINDy | Sparse Identification of Nonlinear Dynamics |
| SLF | Straight and Level Flight |
References
- Cheng, Z.; Pei, H. Control Effectiveness Enhancement for the Hovering/Cruising Transition Control of a Ducted Fan UAV. J. Intell. Robot. Syst. 2022, 105. [Google Scholar] [CrossRef]
- Cheng, Z.; Pei, H. Transition Analysis and Practical Flight Control for Ducted Fan Fixed-Wing Aerial Robot: Level Path Flight Mode Transition. IEEE Robot. Autom. Lett. 2022, 7, 3106–3113. [Google Scholar] [CrossRef]
- Cheng, Z.; Pei, H. Flight Transition Control for Ducted Fan UAV with Saturation on Control Surfaces. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 5–18 June 2021; pp. 439–446. [Google Scholar] [CrossRef]
- Marconi, L.; Naldi, R.; Gentili, L. Modelling and control of a flying robot interacting with the environment. Automatica 2011, 47, 2571–2583. [Google Scholar] [CrossRef] [Green Version]
- Naldi, R.; Macchelli, A.; Mimmo, N.; Marconi, L. Robust Control of an Aerial Manipulator Interacting with the Environment. IFAC-PapersOnLine 2018, 51, 537–542. [Google Scholar] [CrossRef]
- Marconi, L.; Naldi, R. Control of Aerial Robots: Hybrid Force and Position Feedback for a Ducted Fan. IEEE Control Syst. Mag. 2012, 32, 43–65. [Google Scholar] [CrossRef]
- Naldi, R.; Torre, A.; Marconi, L. Robust Control of a Miniature Ducted-Fan Aerial Robot for Blind Navigation in Unknown Populated Environments. IEEE Trans. Control Syst. Technol. 2015, 23, 64–79. [Google Scholar] [CrossRef]
- Roberts, A.; Tayebi, A. Adaptive position tracking of VTOL UAV. IEEE Trans. Robot. 2011, 27, 129–142. [Google Scholar] [CrossRef] [Green Version]
- Manzoor, T.; Xia, Y.; Ali, Y.; Hussain, K. Flight control techniques and classification of ducted fan aerial vehicles. Kongzhi Lilun Yu Yingyong/Control Theory Appl. 2022, 39, 201–221. [Google Scholar] [CrossRef]
- Hua, M.; Hamel, T.; Morin, P.; Samson, C. Introduction to feedback control of underactuated VTOL vehicles: A review of basic control design ideas and principles. IEEE Control Syst. Mag. 2013, 33, 61–75. [Google Scholar] [CrossRef]
- Eren, U.; Prach, A.; Kocer, B.; Rakovic, S.V.; Kayacan, E.; Acikmese, B. Model Predictive Control in Aerospace Systems: Current State and Opportunities. J. Guid. Control. Dyn. 2017, 40, 1541–1566. [Google Scholar] [CrossRef]
- Banazadeh, A.; Emami, S.A. Control effectiveness investigation of a ducted-fan aerial vehicle using model predictive controller. In Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, 10–12 August 2014; pp. 532–537. [Google Scholar] [CrossRef]
- Emami, A.; Banazadeh, A. Robustness investigation of a ducted-fan aerial vehicle control, using linear, adaptive, and model predictive controllers. Int. J. Adv. Mechatron. Syst. 2015, 6, 108–117. [Google Scholar] [CrossRef]
- Manzoor, T.; Xia, Y.; Zhai, D.H.; Ma, D. Trajectory tracking control of a VTOL unmanned aerial vehicle using offset-free tracking MPC. Chin. J. Aeronaut. 2020, 33, 2024–2042. [Google Scholar] [CrossRef]
- Emami, A.; Rezaeizadeh, A. Adaptive model predictive control-based Attitude and Trajectory Tracking of a VTOL Aircraft. IET Control Theory Appl. 2018, 12, 2031–2042. [Google Scholar] [CrossRef]
- Manzoor, T.; Sun, Z.; Xia, Y.; Ma, D. MPC based compound flight control strategy for a ducted fan aircraft. Aerosp. Sci. Technol. 2020, 107, 106264. [Google Scholar] [CrossRef]
- Manzoor, T.; Pei, H.; Cheng, Z. Composite observer-based robust model predictive control technique for ducted fan aerial vehicles. Nonlinear Dyn. 2022. [Google Scholar] [CrossRef]
- Hewing, L.; Wabersich, K.P.; Menner, M.; Zeilinger, M.N. Learning-Based Model Predictive Control: Toward Safe Learning in Control. Annu. Rev. Control. Robot. Auton. Syst. 2020, 3, 269–296. [Google Scholar] [CrossRef]
- Brunke, L.; Greeff, M.; Hall, A.W.; Yuan, Z.; Zhou, S.; Panerati, J.; Schoellig, A.P. Safe Learning in Robotics: From Learning-Based Control to Safe Reinforcement Learning. Annu. Rev. Control. Robot. Auton. Syst. 2022, 5, 411–444. [Google Scholar] [CrossRef]
- Kaheman, K.; Kaiser, E.; Strom, B.; Kutz, J.N.; Brunton, S.L. Learning Discrepancy Models From Experimental Data. arXiv 2019, arXiv:1909.08574. [Google Scholar] [CrossRef]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Brunton, S.L.; Nathan Kutz, J.; Manohar, K.; Aravkin, A.Y.; Morgansen, K.; Klemisch, J.; Goebel, N.; Buttrick, J.; Poskin, J.; Blom-Schieber, A.W.; et al. Data-Driven Aerospace Engineering: Reframing the Industry with Machine Learning. AIAA J. 2021, 59, 2820–2847. [Google Scholar] [CrossRef]
- Zhang, W.; Shen, J.; Ye, X.; Zhou, S. Error model-oriented vibration suppression control of free-floating space robot with flexible joints based on adaptive neural network. Eng. Appl. Artif. Intell. 2022, 114, 105028. [Google Scholar] [CrossRef]
- Hosseini, S.; Poormirzaee, R.; Hajihassani, M. Application of reliability-based back-propagation causality-weighted neural networks to estimate air-overpressure due to mine blasting. Eng. Appl. Artif. Intell. 2022, 115, 105281. [Google Scholar] [CrossRef]
- Floriano, B.R.; Vargas, A.N.; Ishihara, J.Y.; Ferreira, H.C. Neural-network-based model predictive control for consensus of nonlinear systems. Eng. Appl. Artif. Intell. 2022, 116, 105327. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J. Quantized-communication-based neural network control for formation tracking of networked multiple unmanned surface vehicles without velocity information. Eng. Appl. Artif. Intell. 2022, 114, 105160. [Google Scholar] [CrossRef]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Sparse identification of nonlinear dynamics for model predictive control in the low-data limit. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20180335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, R.; Lu, Y.; He, Z. System identification method based on interpretable machine learning for unknown aircraft dynamics. Aerosp. Sci. Technol. 2022, 126, 107593. [Google Scholar] [CrossRef]
- Quade, M.; Abel, M.; Nathan Kutz, J.; Brunton, S.L. Sparse identification of nonlinear dynamics for rapid model recovery. Chaos: Interdiscip. J. Nonlinear Sci. 2018, 28, 063116. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Arnold, F.; King, R. State–space modeling for control based on physics-informed neural networks. Eng. Appl. Artif. Intell. 2021, 101, 104195. [Google Scholar] [CrossRef]
- Zobeiry, N.; Humfeld, K.D. A physics-informed machine learning approach for solving heat transfer equation in advanced manufacturing and engineering applications. Eng. Appl. Artif. Intell. 2021, 101, 104232. [Google Scholar] [CrossRef]
- Shen, S.; Lu, H.; Sadoughi, M.; Hu, C.; Nemani, V.; Thelen, A.; Webster, K.; Darr, M.; Sidon, J.; Kenny, S. A physics-informed deep learning approach for bearing fault detection. Eng. Appl. Artif. Intell. 2021, 103, 104295. [Google Scholar] [CrossRef]
- Liu, X.; Peng, W.; Gong, Z.; Zhou, W.; Yao, W. Temperature field inversion of heat-source systems via physics-informed neural networks. Eng. Appl. Artif. Intell. 2022, 113, 104902. [Google Scholar] [CrossRef]
- Nascimento, R.G.; Fricke, K.; Viana, F.A. A tutorial on solving ordinary differential equations using Python and hybrid physics-informed neural network. Eng. Appl. Artif. Intell. 2020, 96, 103996. [Google Scholar] [CrossRef]
- Ahnert, K.; Abel, M. Numerical differentiation of experimental data: Local versus global methods. Comput. Phys. Commun. 2007, 177, 764–774. [Google Scholar] [CrossRef]
- Chartrand, R. Numerical Differentiation of Noisy, Nonsmooth Data. Int. Sch. Res. Netw. 2011, 2011, 1023–1033. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Schaeffer, H. On the Convergence of the SINDy Algorithm. Multiscale Model. Simul. 2019, 17, 948–972. [Google Scholar] [CrossRef] [Green Version]
- Gershenfeld, N.A. The Nature of Mathematical Modeling; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar] [CrossRef]
- Xue, R.; Dai, L.; Huo, D.; Xie, H.; Sun, Z.; Xia, Y. Compound tracking control based on MPC for quadrotors with disturbances. J. Frankl. Inst. 2022, 359, 7992–8013. [Google Scholar] [CrossRef]
- Chen, H.; Allgöwer, F. A Quasi-Infinite Horizon Nonlinear Model Predictive Control Scheme with Guaranteed Stability. Automatica 1998, 34, 1205–1217. [Google Scholar] [CrossRef]
- Althoff, M.; Stursberg, O.; Buss, M. Reachability analysis of nonlinear systems with uncertain parameters using conservative linearization. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 4042–4048. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Xia, Y. Receding horizon tracking control of unicycle-type robots based on virtual structure. Int. J. Robust Nonlinear Control 2016, 26, 3900–3918. [Google Scholar] [CrossRef]
- Sontag, E.D. Input to State Stability: Basic Concepts and Results. In Nonlinear and Optimal Control Theory: Lectures Given at the C.I.M.E. Summer School Held in Cetraro, Italy June 19–29, 2004; Springer: Berlin/Heidelberg, Germany, 2008; pp. 163–220. [Google Scholar] [CrossRef]
- Sun, Z.; Dai, L.; Liu, K.; Xia, Y.; Johansson, K.H. Robust MPC for tracking constrained unicycle robots with additive disturbances. Automatica 2018, 90, 172–184. [Google Scholar] [CrossRef]
- Cheng, Z.; Pei, H.; Li, S. Neural-Networks Control for Hover to High-Speed-Level-Flight Transition of Ducted Fan UAV With Provable Stability. IEEE Access 2020, 8, 100135–100151. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi–A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Features 1 | Advantages | Disadvantages |
|---|---|---|---|
| Linear MPC [12,13] | AMS | Simple design, effective | Lack adequate tracking and robustness. |
| computations. | |||
| 1. Disturbance rejection RMPC 2, | ACDMPS | Considered time-delays, discrete time optimization problem | 1. RMPC 2: lack effective control performance, |
| 2. Disturbance rejection adaptive | 2. Adaptive MPC: design intricacy may not be effective, feasibility analysis is not available for both schemes. | ||
| Observer-based MPC [14] | ACDMPS | Effective computations, easy real-time implementation, considered time delays. | Ineffective control performance, recursive easibility cannot be established for the entire flight. |
| Compound RMPC 2 [16,17] | ACDMPS | - | Inadequate performance, suitable if the DOB’s dynamics is faster than disturbance dynamics. |
| Scenario | MPC-CFC | Proposed | Scenario | MPC-CFC | Proposed | ||
|---|---|---|---|---|---|---|---|
| (m) | Case(1)-Figure 5a | 1.5752 | 0.0016 | (m) | Case(1)-Figure 5b | 0.1711 | 0.1424 |
| Case(1)-Figure 5a | 0.1569 | 0.0157 | Case(1)-Figure 5a | 0.0011 | 1.09 | ||
| Case(2)-Figure 7a | 2.3279 | 0.0141 | Case(2)-Figure 7b | 0.0999 | 0.0987 | ||
| Case(2)-Figure 7a | 0.2357 | 0.0235 | Case(2)-Figure 7a | 0.0016 | 9.82 | ||
| Case(3)-Figure 8a | 2.8687 | 0.0157 | Case(3)-Figure 8b | 0.122 | 0.0782 | ||
| Case(3)-Figure 8a | 0.4729 | 0.0314 | Case(3)-Figure 8a | 0.002 | 1.091 | ||
| (m) | Case(1)-Figure 5a | 0.03066 | 0.0003 | () | Case(1)-Figure 5b | 0.0482 | 0.0378 |
| Case(1)-Figure 5a | 0.0325 | 0.0033 | Case(2)-Figure 7b | 0.0376 | 0.0349 | ||
| Case(2)-Figure 7a | 0.4429 | 0.0029 | Case(3)-Figure 8b | 0.0748 | 0.0284 | ||
| Case(2)-Figure 7a | 0.0486 | 0.049 | () | Case(1)-Figure 5b | 0.0466 | 0.0460 | |
| Case(3)-Figure 8a | 0.5446 | 0.0033 | Case(2)-Figure 7b | 0.0371 | 0.0344 | ||
| Case(3)-Figure 8a | 0.0966 | 0.0065 | Case(3)-Figure 8b | 0.069 | 0.0389 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manzoor, T.; Pei, H.; Sun, Z.; Cheng, Z. Model Predictive Control Technique for Ducted Fan Aerial Vehicles Using Physics-Informed Machine Learning. Drones 2023, 7, 4. https://doi.org/10.3390/drones7010004
Manzoor T, Pei H, Sun Z, Cheng Z. Model Predictive Control Technique for Ducted Fan Aerial Vehicles Using Physics-Informed Machine Learning. Drones. 2023; 7(1):4. https://doi.org/10.3390/drones7010004
Chicago/Turabian StyleManzoor, Tayyab, Hailong Pei, Zhongqi Sun, and Zihuan Cheng. 2023. "Model Predictive Control Technique for Ducted Fan Aerial Vehicles Using Physics-Informed Machine Learning" Drones 7, no. 1: 4. https://doi.org/10.3390/drones7010004
APA StyleManzoor, T., Pei, H., Sun, Z., & Cheng, Z. (2023). Model Predictive Control Technique for Ducted Fan Aerial Vehicles Using Physics-Informed Machine Learning. Drones, 7(1), 4. https://doi.org/10.3390/drones7010004