
Compressed Sensing-Based Genetic Markov Localization for Mobile Transmitters




Abstract
:1. Introduction
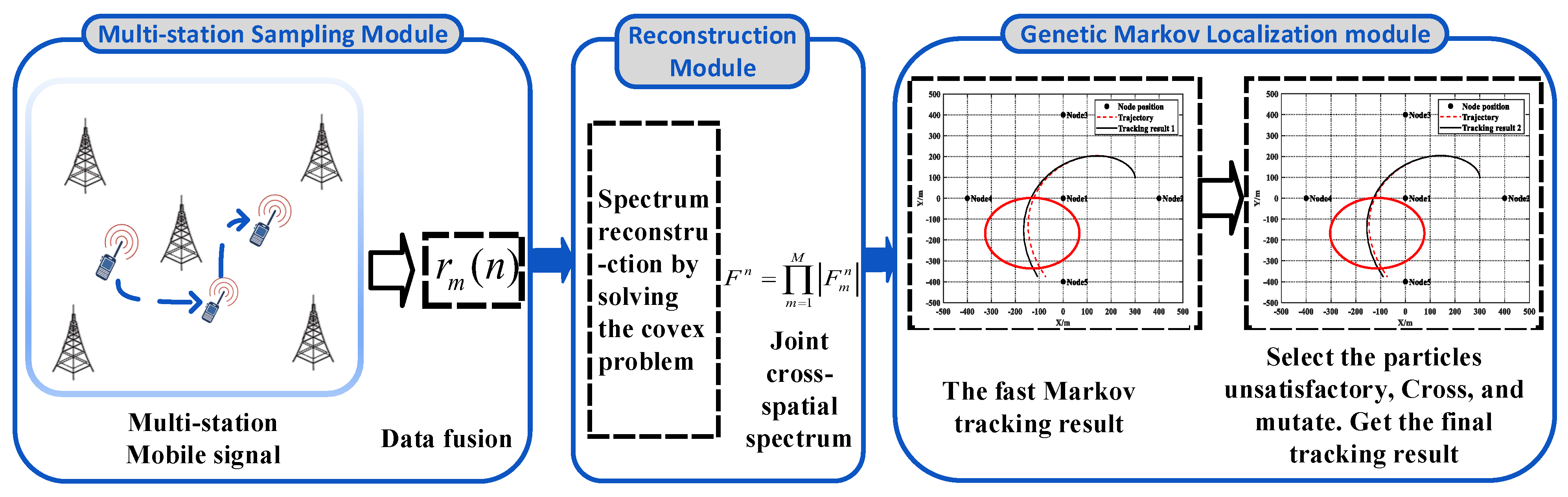
- We propose a compressed sensing-based localization method. After obtaining the signal data at a lower sampling rate, the cross joint spatial spectrum of the samples is recovered to directly estimate the position of the signal;
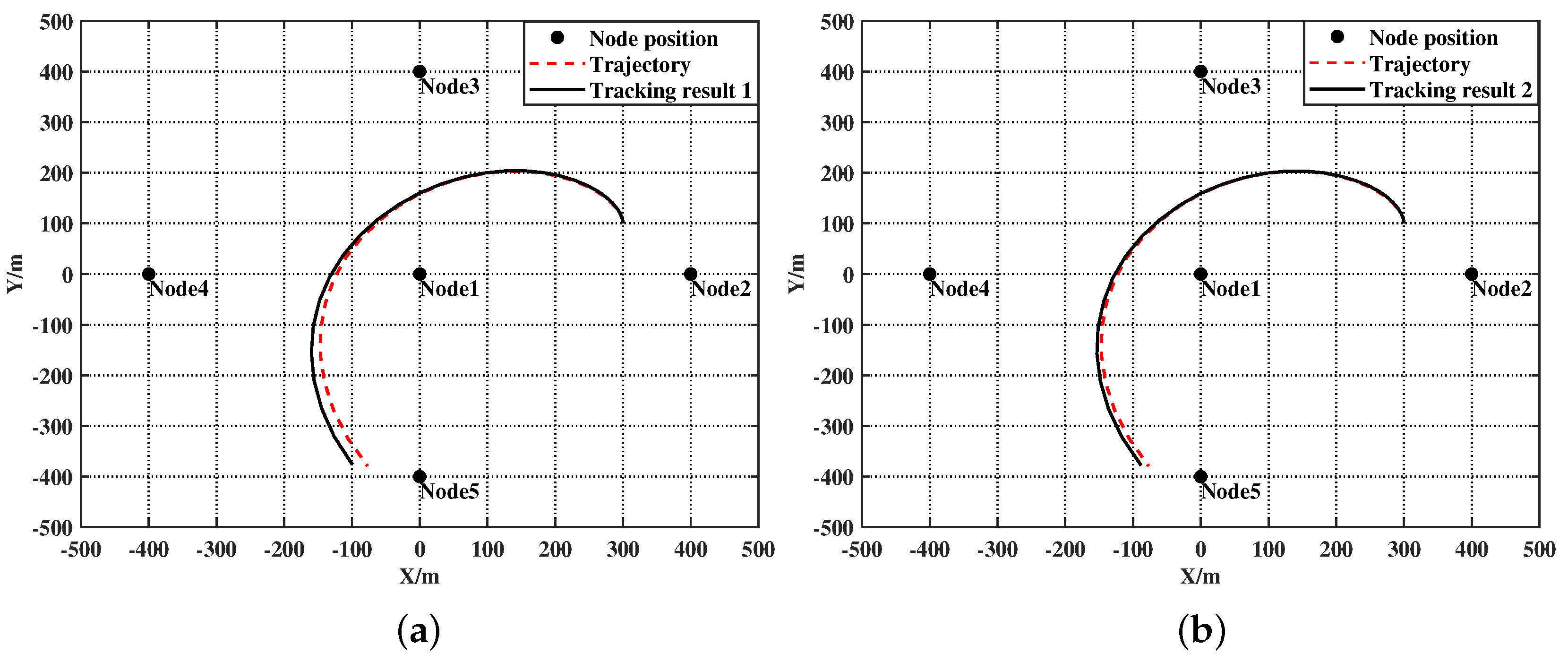
- Compared with the traditional particle filtering method, we proposed a genetic Markov method, which is a new two-step method. The inaccurate points in the preliminary results are genetically corrected and finally fused to generate the localization result;
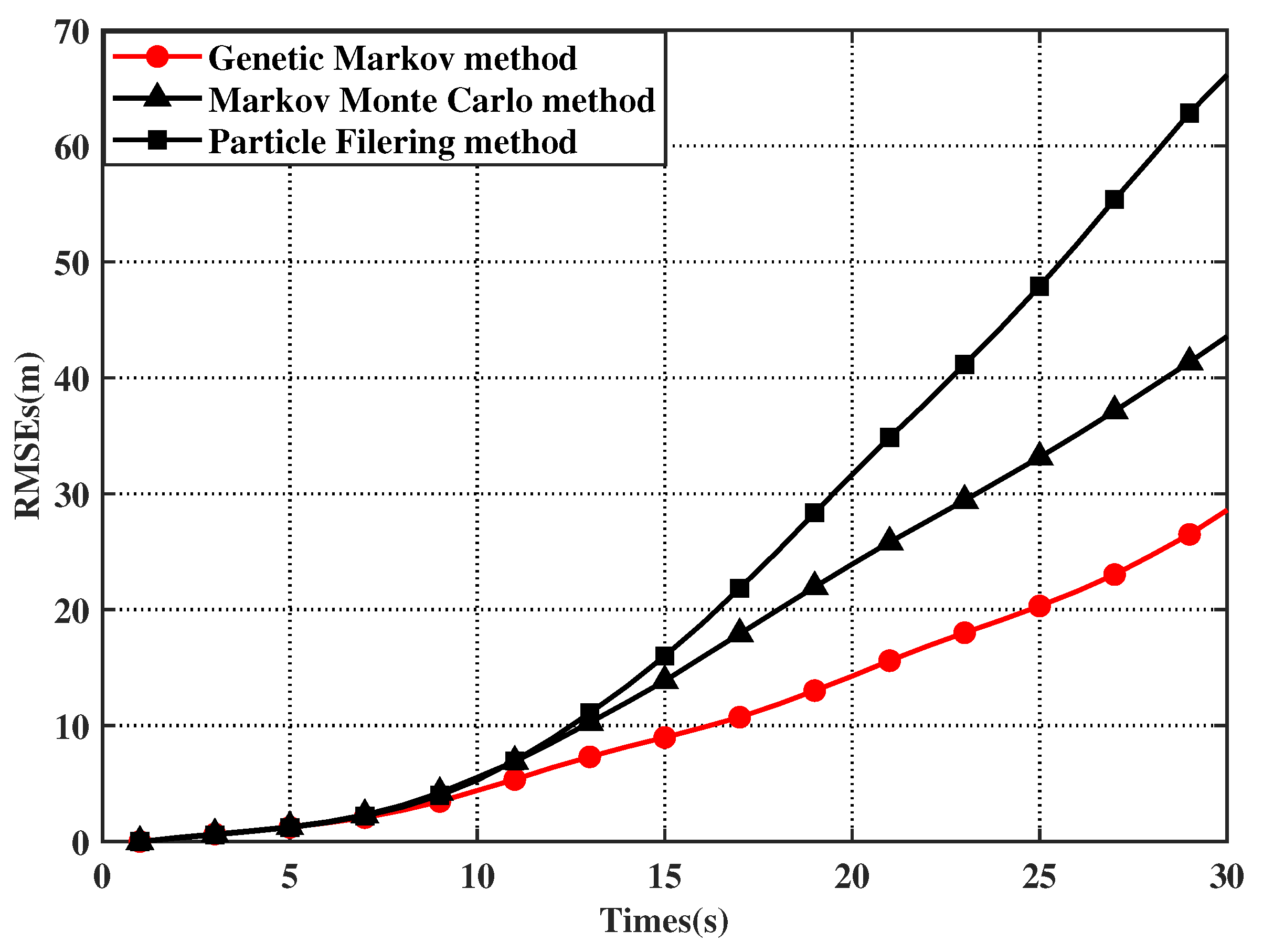
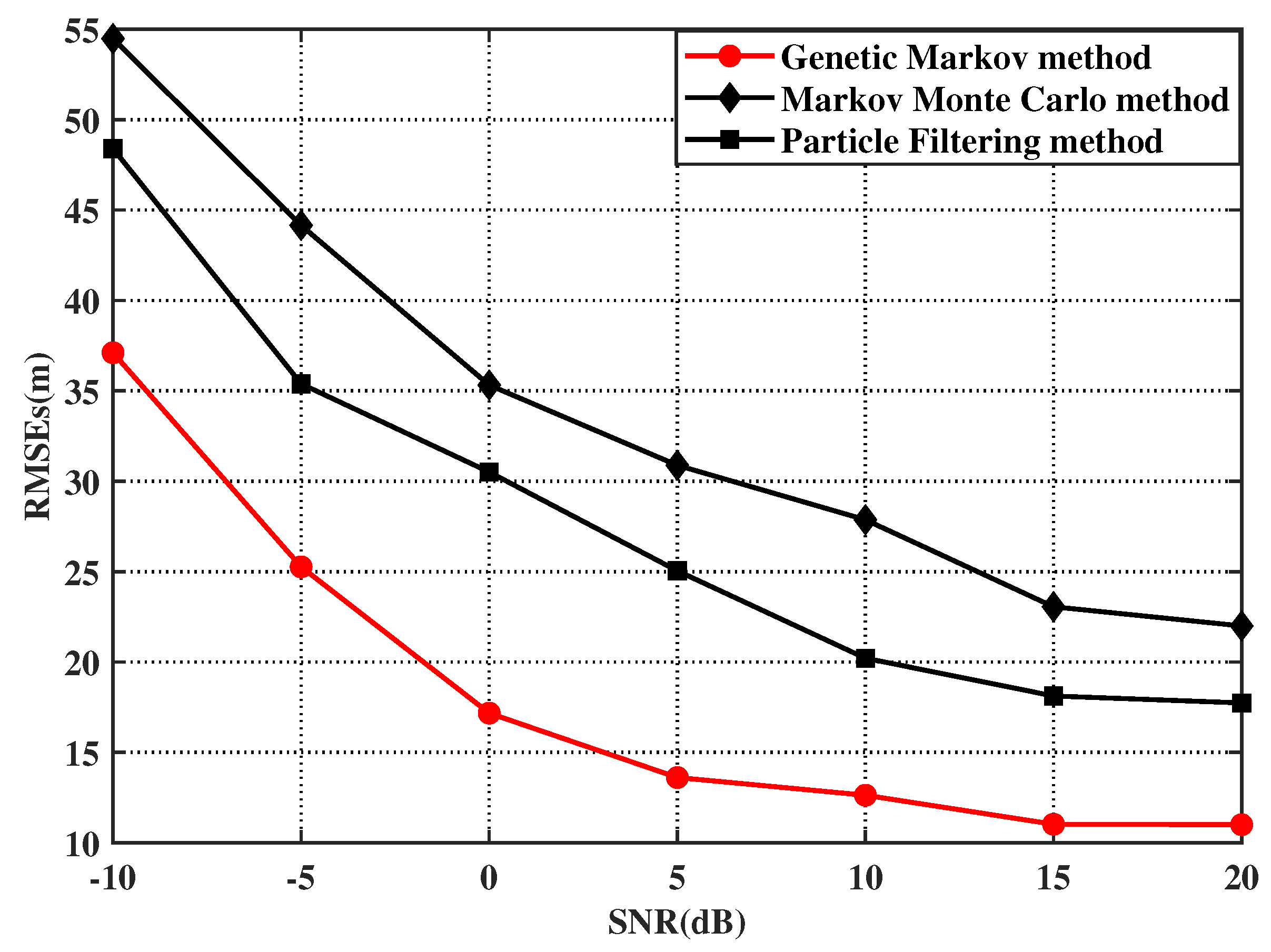
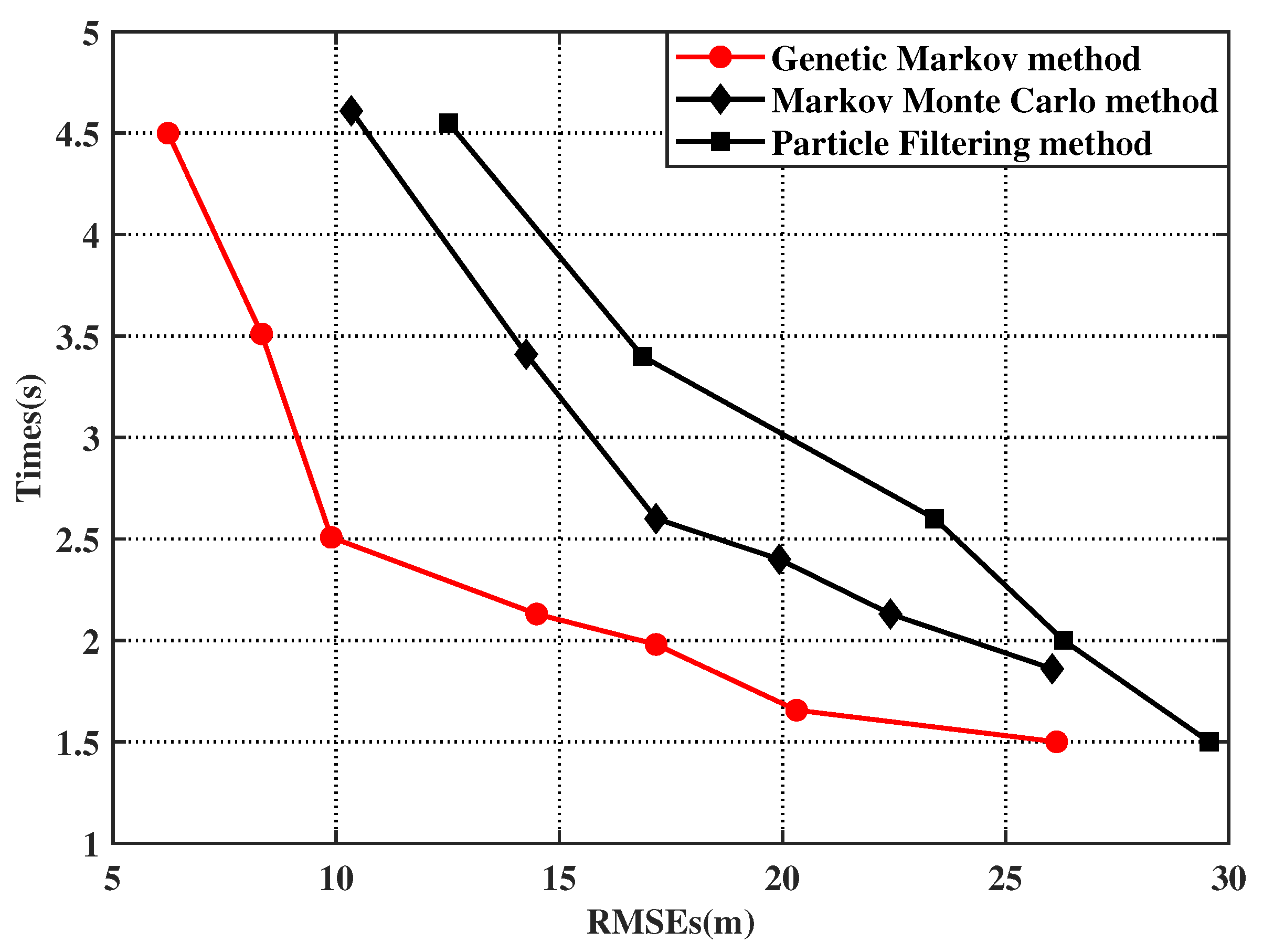
- Extensive simulations verify that the proposed method is superior to the particle filter method and the Markov Monte Carlo method. Under the same experimental environment, the proposed method can achieve higher accuracy in a shorter time.
2. System Model
3. Proposed Method
4. Results and Discussion
4.1. Parameters Setting
4.2. Simulation Results
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, X.; Sheng, M.; Zhao, N. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2022, 35, 19–34. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutorials 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zhang, K.; Wang, J. Current Status and Development Trend of Low-altitude Anti-UAV Technology. Aeronaut. Eng. Prog. 2018, 9, 1–8. [Google Scholar]
- Sun, C. Application of Unmanned Aerial Reconnaissance Force in Special Operations. J. Ordnance Equip. Eng. 2011, 32, 40–42. [Google Scholar]
- Jiang, C.; Fang, Y.; Zhao, P. Intelligent UAV Identity Authentication and Safety Supervision Based on Behavior Modeling and Prediction. IEEE Trans. Ind. Informatics 2020, 16, 6652–6662. [Google Scholar] [CrossRef]
- Wan, P.; Huang, G.; Wang, J. Passive Localization of Signal Source Based on UAVs in Complex Environment. China Commun. 2020, 17, 107–116. [Google Scholar] [CrossRef]
- Chaudhari, S.; Cabric, D. Cyclic Weighted Centroid Algorithm for Transmitter Localization in the Presence of Interference. IEEE Trans. Cogn. Commun. Netw. 2016, 2, 162–177. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F. Mobile Positioning Using Wireless Networks: Possibilities and Fundamental Limitations Based on Available Wireless Network Measurements. Signal Process. Mag. IEEE 2005, 22, 41–53. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, V. An Asymptotically Efficient Estimator in Closed-Form for 3-D AOA Localization Using a Sensor Network. IEEE Trans. Wirel. Commun. 2015, 14, 6524–6535. [Google Scholar] [CrossRef]
- Alma’aitah, A.; Alsaify, B.; Bani-Hani, R. Three-Dimensional Empirical AoA Localization Technique for Indoor Applications. Sensors 2019, 19, 5544. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Ho, K.C.; Yang, Y. Computationally Attractive and Statistically Efficient Estimator for Noise Resilient TOA Localization. Signal Process. 2022, 200, 108663. [Google Scholar] [CrossRef]
- Zhao, K.; Zhao, T.; Zheng, Z. Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors 2020, 20, 6513. [Google Scholar] [CrossRef]
- Ma, B.; Tong, C.; Tian, M. A TDOA Localization Method for Complex Environment Localization. J. Phys. Conf. Ser. 2021, 2004, 012003. [Google Scholar] [CrossRef]
- Chan, Y.T.; Towers, J.J. Sequential Localization of A Radiating Source by Doppler-shifted Frequency Measurements. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 1084–1090. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S. Locating the Nodes: Cooperative Localization in Wireless Sensor Networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Liu, C.; Fang, D.; Yang, Z. RSS Distribution-Based Passive Localization and Its Application in Sensor Networks. IEEE Trans. Wirel. Commun. 2016, 15, 2883–2895. [Google Scholar] [CrossRef]
- Xia, N.; Li, B.; Wang, J. Direct Tracking of Co-Channel Moving Sources With Different Cyclic Frequencies. IEEE Commun. Lett. 2020, 24, 1715–1718. [Google Scholar] [CrossRef]
- Lee, K.; Oh, J.; You, K. TDOA-/FDOA-Based Adaptive Active Target Localization Using Iterated Dual-EKF Algorithm. IEEE Commun. Lett. 2019, 23, 752–755. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, T.; Wang, D. A high precision indoor positioning method based on UKF. J. Intell. Fuzzy Syst. 2022, 42, 3639–3652. [Google Scholar] [CrossRef]
- Gao, H.; Sun, S.; Li, Y. Nonlinear Weighted Measurement Fusion Unscented Kalman Filter with Asymptotic Optimality. Inf. Sci 2015, 299, 85–98. [Google Scholar]
- Ryota, Y.; Ichiro, M.; Kenji, F. Particle Filter Design Based on Reinforcement Learning and Its Application to Mobile Robot Localization. Ieice Trans. Inf. Syst. 2022, 105, 1010–1023. [Google Scholar]
- Samuel, L.S.; Nelyadi, S.S.; Aidan, F.B. Particle Filter Approach to Utilization of Wireless Signal Strength for Mobile Robot Localization in Indoor Environments. Int. J. Wirel. Mob. Netw. 2018, 10, 21–38. [Google Scholar]
- Gordon, N.J.; Salmond, D.J. Novel Approach to Nonlinear/Non–Gaussian Bayesian State Estimation. IEE Proceedings. Part F 1993, 140, 107–113. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Han, C.Z.; Hu, Y. Adaptive MCMC Particle Filter for Tracking Maneuvering Target. In Proceedings of the Chinese Control Conference, Yantai, Chain, 22–24 July 2011; pp. 3128–3133. [Google Scholar]
- Yu, X.; Wang, H.; Wu, J. A method of fingerprint indoor localization based on received signal strength difference by using compressive sensing. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 839–848. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Fang, X.; Chen, Z. LCS: Compressive Sensing Based Device-free Localization for Multiple Targets in Sensor Networks. In Proceedings of the Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 145–149. [Google Scholar]
- Eltrass, A.; Khalil, M. Automotive Radar System for Multiple-vehicle Detection and Tracking in Urban Environments. IET Intell. Transp. Syst. 2018, 12, 783–792. [Google Scholar] [CrossRef]
- Aharon, O.; Tslil, O.; Carmi, A. A Fast MCMC Particle Filter. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1874–1881. [Google Scholar]
- Liu, N.; Wang, R.; Zhao, Y. Computationally Efficient TDOA and FDOA Estimation Algorithm in Passive Emitter Localisation. IET Radar Sonar Navig. 2019, 13, 1731–1740. [Google Scholar] [CrossRef]
- Xia, N.; Li, B.; Wang, J. A Direct Localization Method in the Presence of Cochannel Interference and Multipath Fading. IEEE Syst. J. 2020, 15, 2855–2858. [Google Scholar] [CrossRef]
- Xia, N.; Xing, B. A Direct Localization Method for HF Source Geolocation and Experimental Results. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 728–732. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Modulation Type | QPSK |
| Carrier Frequency | |
| Number of Base Stations | M = 5 |
| Number of Particles | N = 400 |
| Sample Interval | |
| Sample Duration | |
| Number of Sampling Snapshots | |
| Transmit Power | |
| Initial State | |
| Process Noise Covariance Matrix | diag |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Chai, Y.; Ying, S.; Chang, S.; Xia, N. Compressed Sensing-Based Genetic Markov Localization for Mobile Transmitters. Drones 2023, 7, 56. https://doi.org/10.3390/drones7010056
Huang S, Chai Y, Ying S, Chang S, Xia N. Compressed Sensing-Based Genetic Markov Localization for Mobile Transmitters. Drones. 2023; 7(1):56. https://doi.org/10.3390/drones7010056
Chicago/Turabian StyleHuang, Sai, Yuqing Chai, Shanchuan Ying, Shuo Chang, and Nan Xia. 2023. "Compressed Sensing-Based Genetic Markov Localization for Mobile Transmitters" Drones 7, no. 1: 56. https://doi.org/10.3390/drones7010056
APA StyleHuang, S., Chai, Y., Ying, S., Chang, S., & Xia, N. (2023). Compressed Sensing-Based Genetic Markov Localization for Mobile Transmitters. Drones, 7(1), 56. https://doi.org/10.3390/drones7010056