
Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. UAV Model and Environment Model
2.1. UAV Motion Model
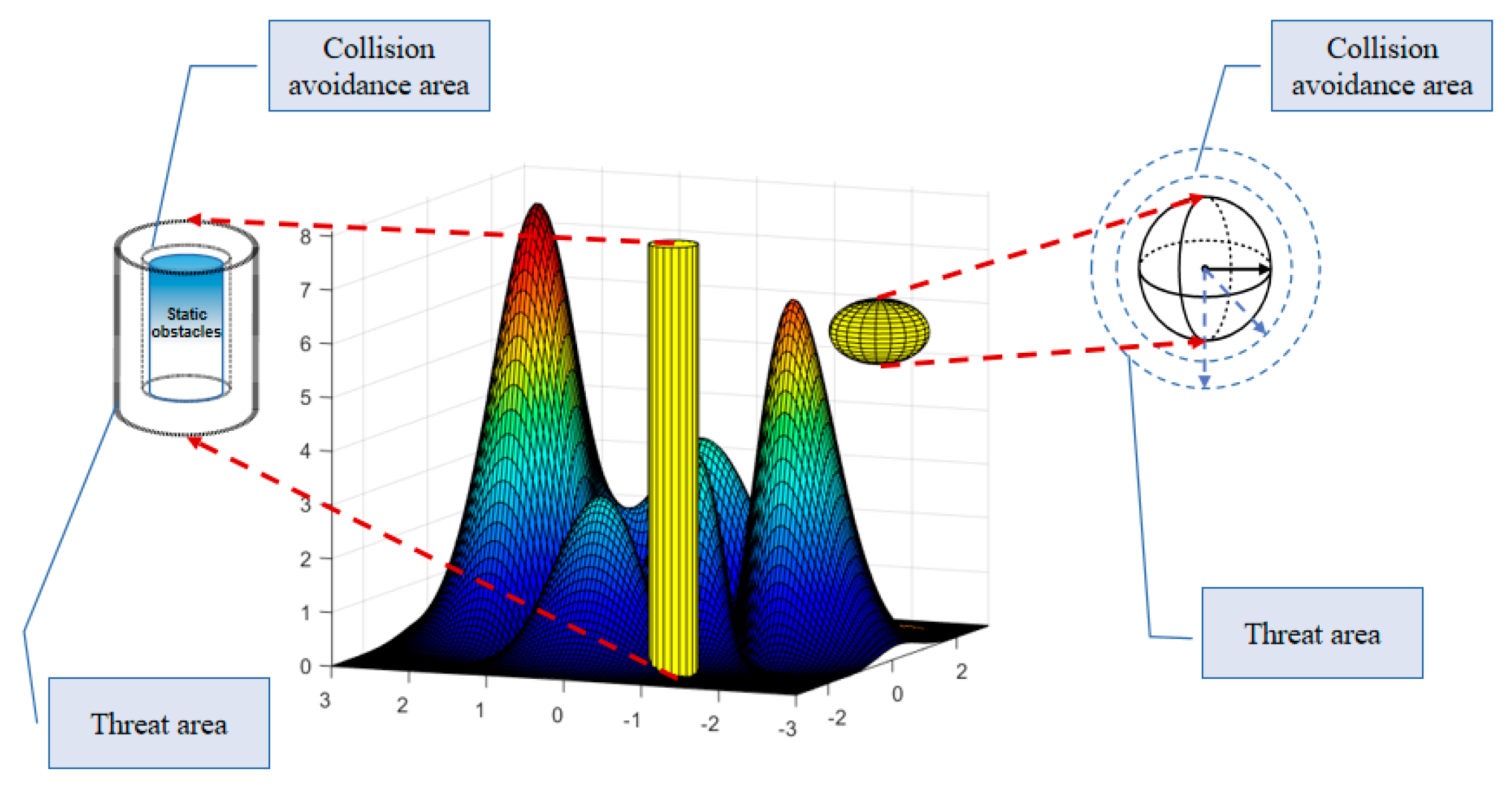
2.2. UAV Collision Avoidance Model
2.3. Moving Target Model
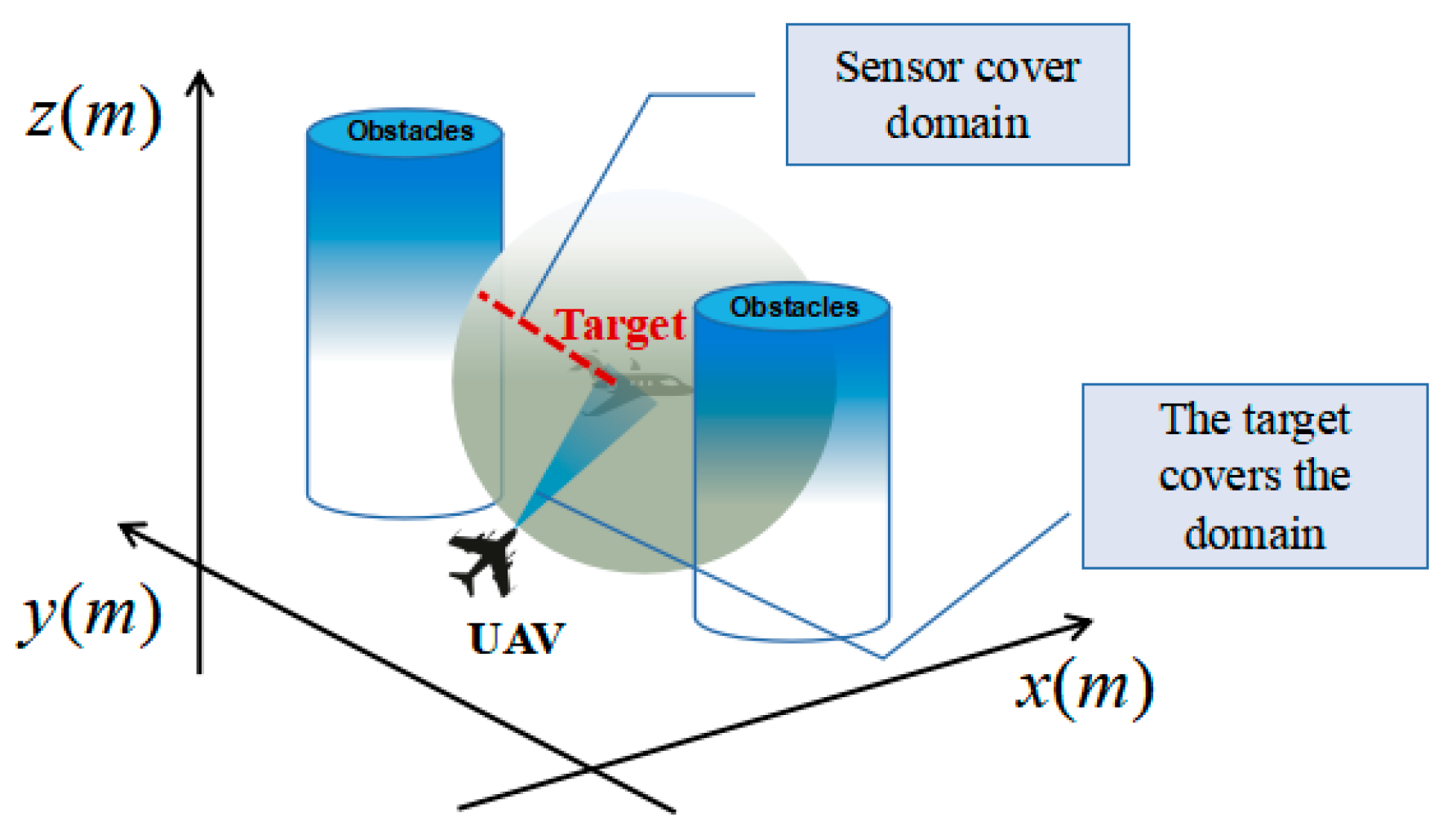
2.4. Target Observation Coverage Modelling
3. Designing a Multi-UAV Cooperative Tracking System Based on the Fusion Algorithm
3.1. System Design
3.2. Multi-UAV Cooperative Trajectory Planning Based on the Fusion Algorithm
3.2.1. Multi-UAV Formation Control Based on the Standoff Algorithm
3.2.2. Track Planning UAVs Take during Cooperative Tracking of the Moving Target Based on the Fusion Algorithm
| Algorithm 1: Fusion Algorithm Based on MPC and Standoff. |
| 1. Initialize map environment information |
| 2. Initialize fusion algorithm information |
| 3. Initialize multi-UAV movement information |
| 4. For step = 1, 2, …, N: |
| 5. Obtain the initial state of UAVs in environments , and |
| 6. For k = 1, …, J: |
| 7. if multi-UAV formations encounter no surprises: |
| 8. Comprehensive consideration of UAV trajectory planning constraints: ,, |
| 9. Input prediction of velocity and angular velocity control in the time domain , |
| 10. “red” UAV in the environment executing the previous control input of the drone and correcting speed variables based on the Standoff algorithm, and obtains the next state |
| 11. “yellow” UAV in the environment executing the previous control input of the drone and correcting speed variables based on the Standoff algorithm, and obtains the next state |
| 12. “green” UAV in the environment executing the previous control input of the drone and correcting speed variables based on the Standoff algorithm, and obtains the next state |
| 13. Store the above track planning information in the model predictive control module |
| 14. if multi-UAV formations encounters an unexpected obstacle: |
| 15. UAV reconfiguration planning based on Computational (12) |
| 16. Update drone location information based on minimum generation value |
| 17. end if |
| 18. else: break |
| 19. end if |
| 20. end for |
| 21. step = step + 1 |
| 22. end for |
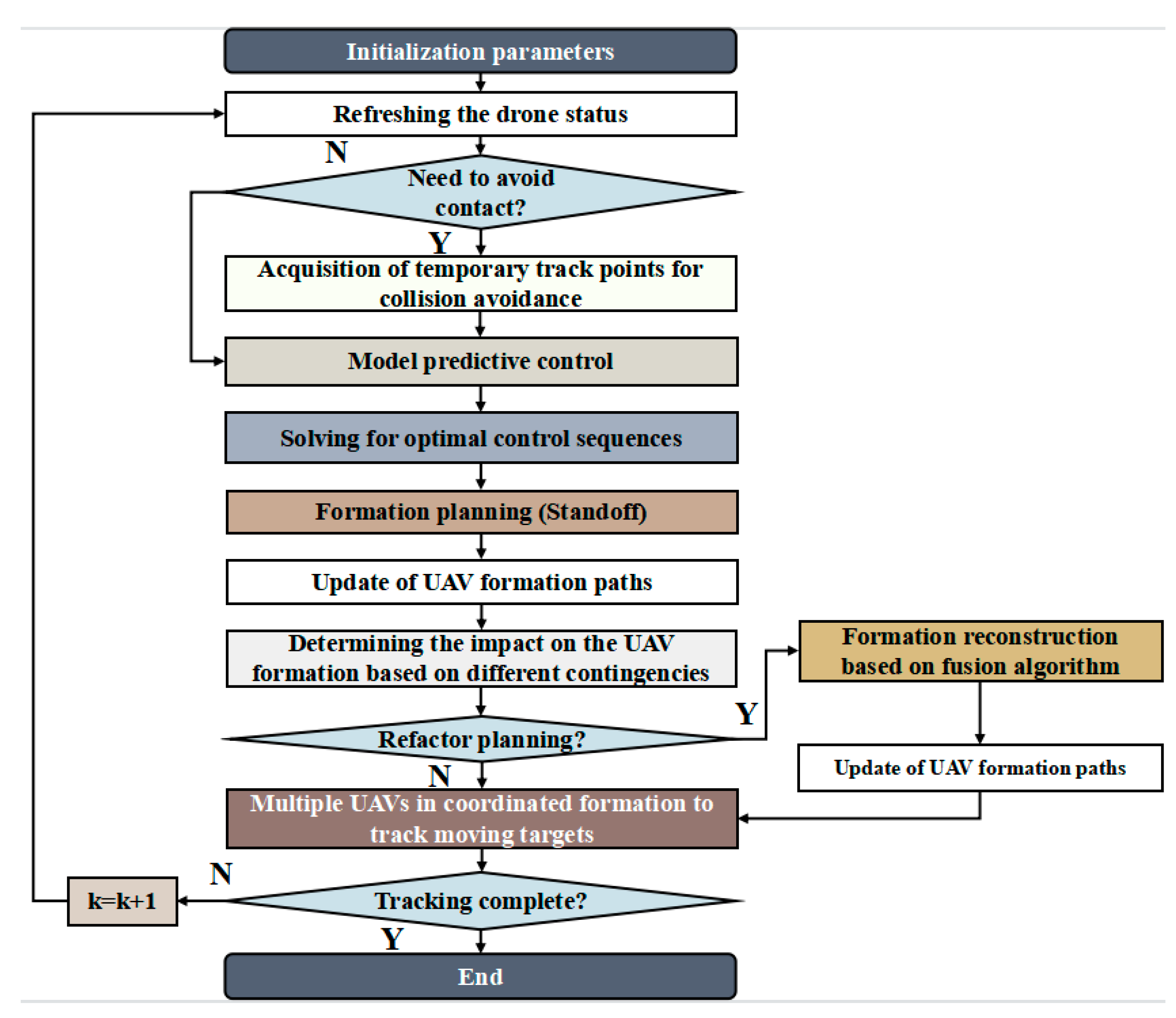
3.3. Application Steps of Multi-UAV Cooperative Tracking of the Moving Target Based on the Fusion Algorithm
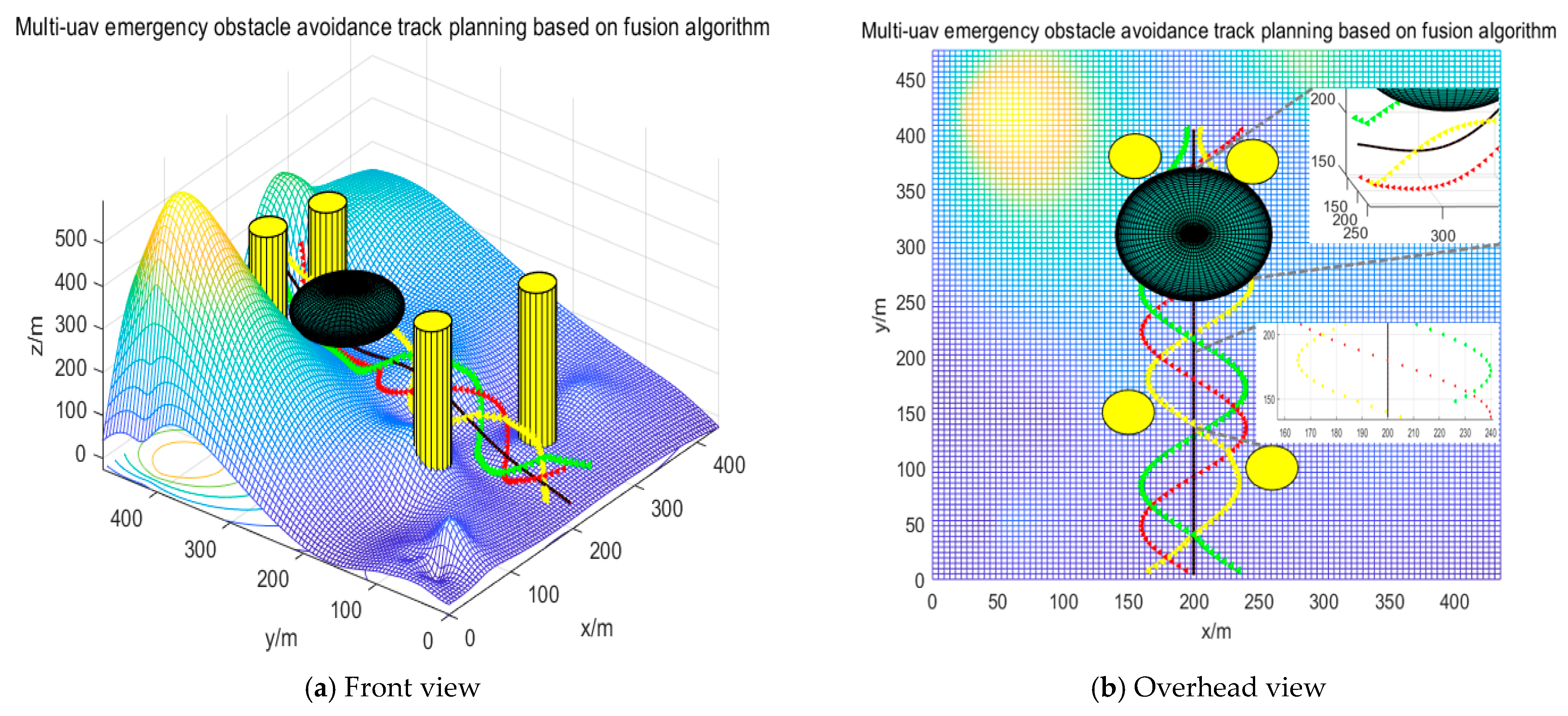
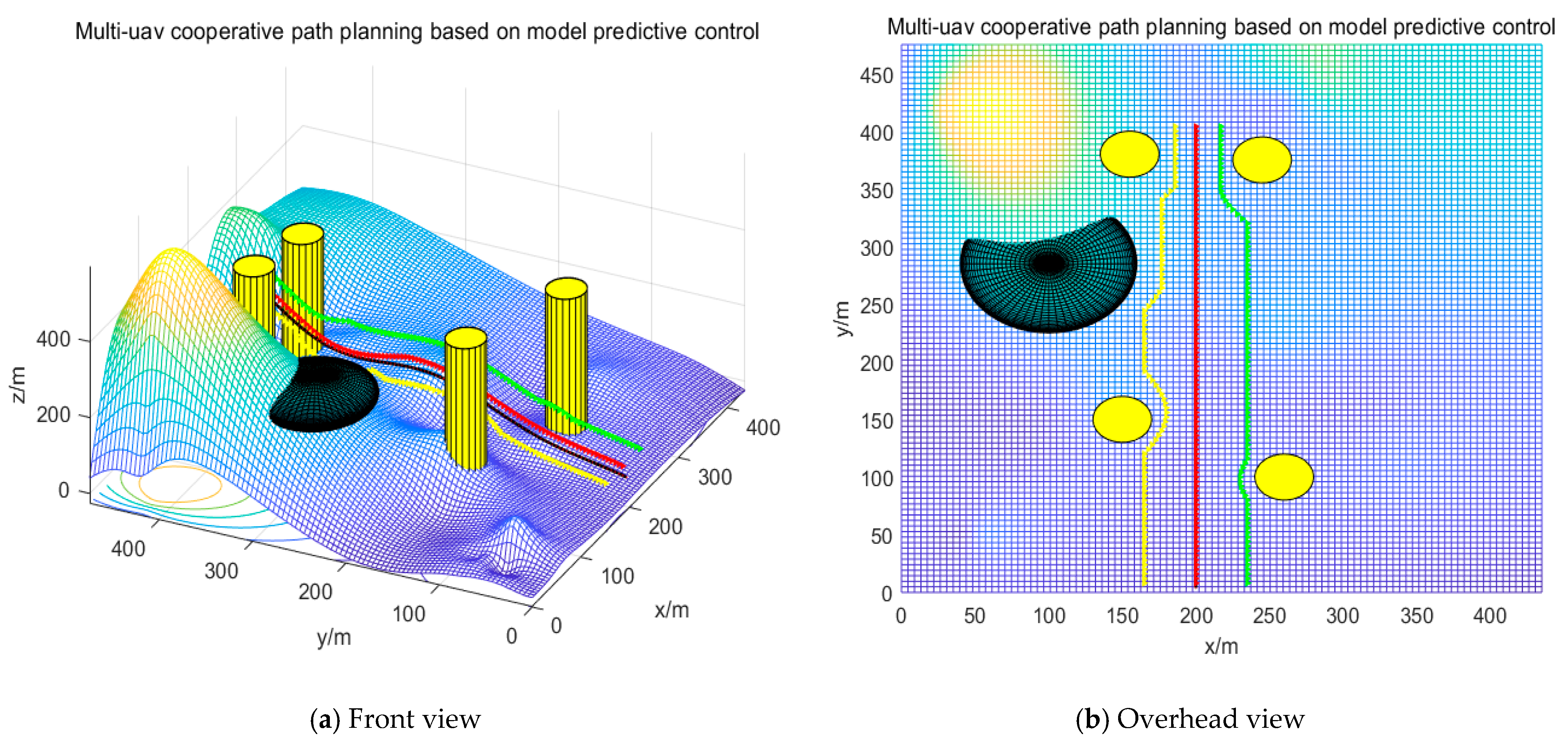
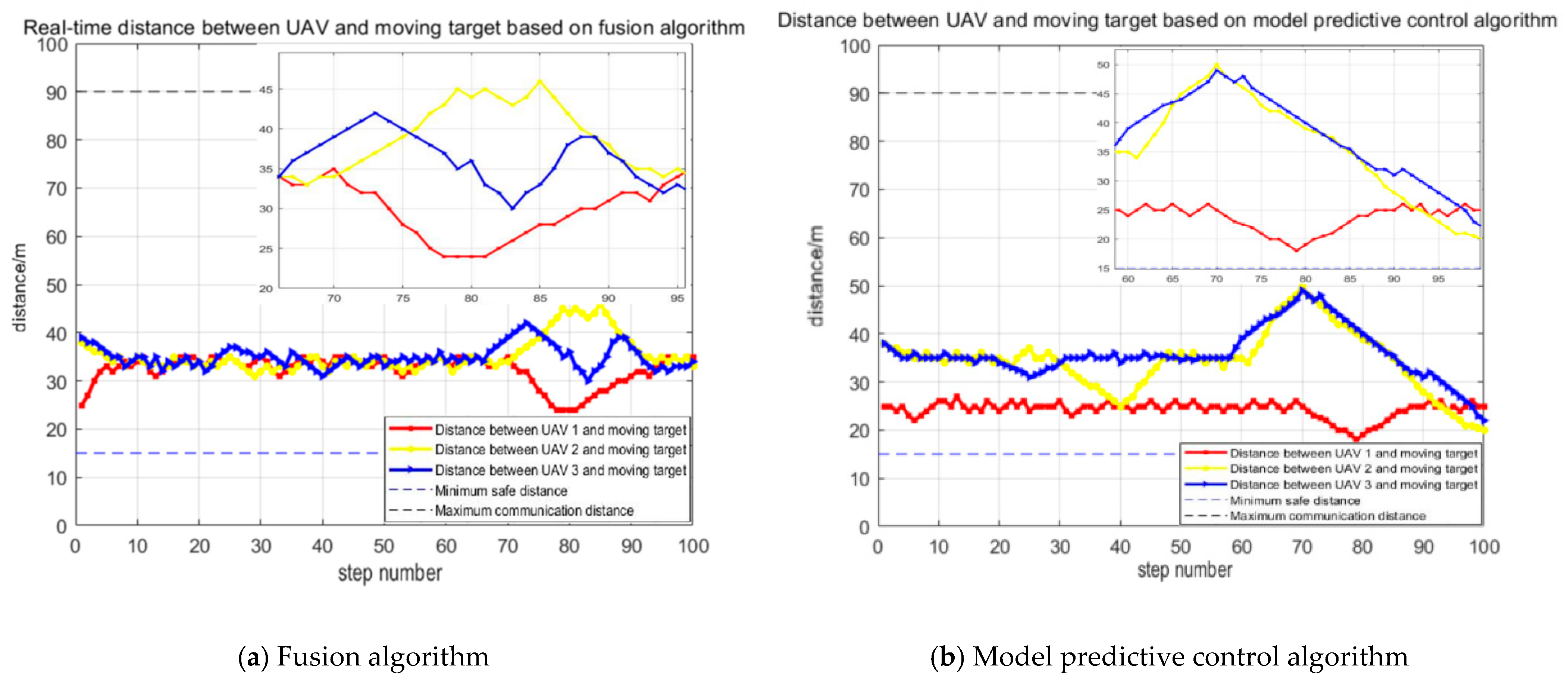
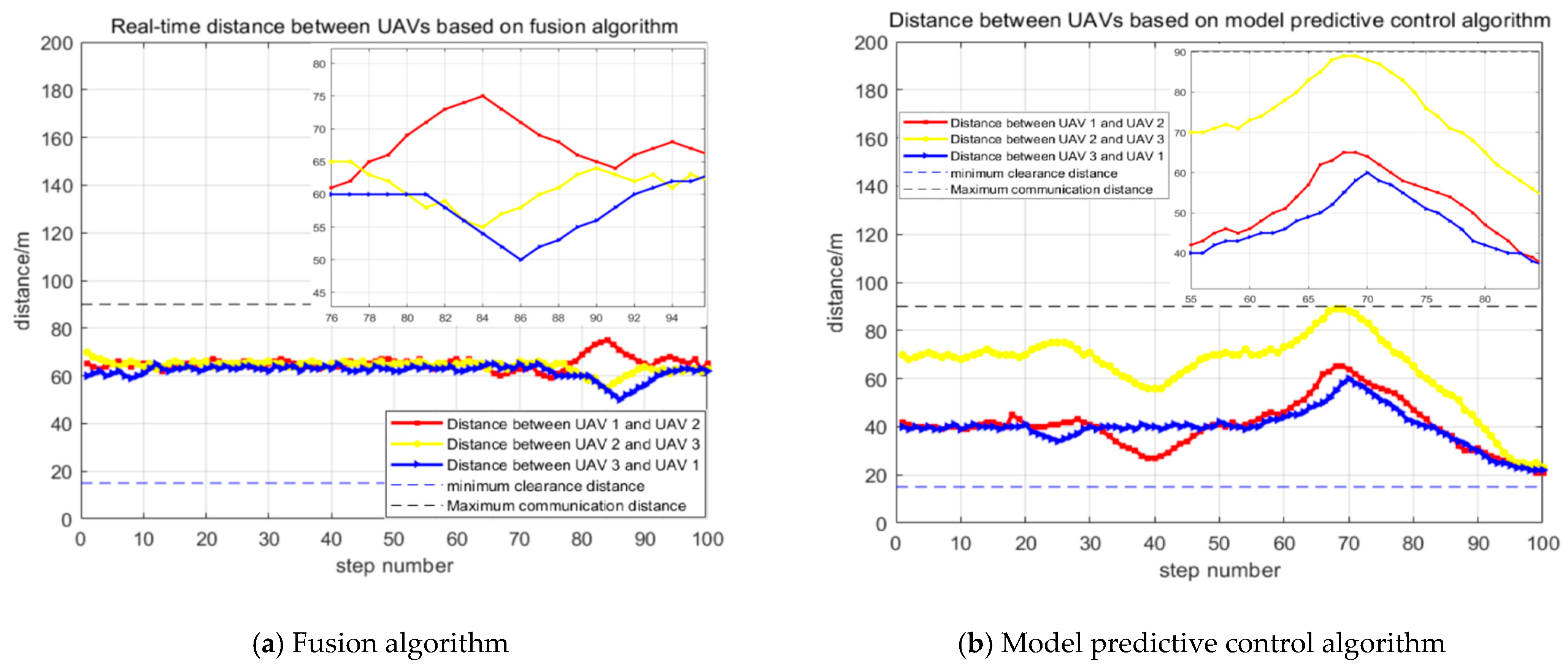
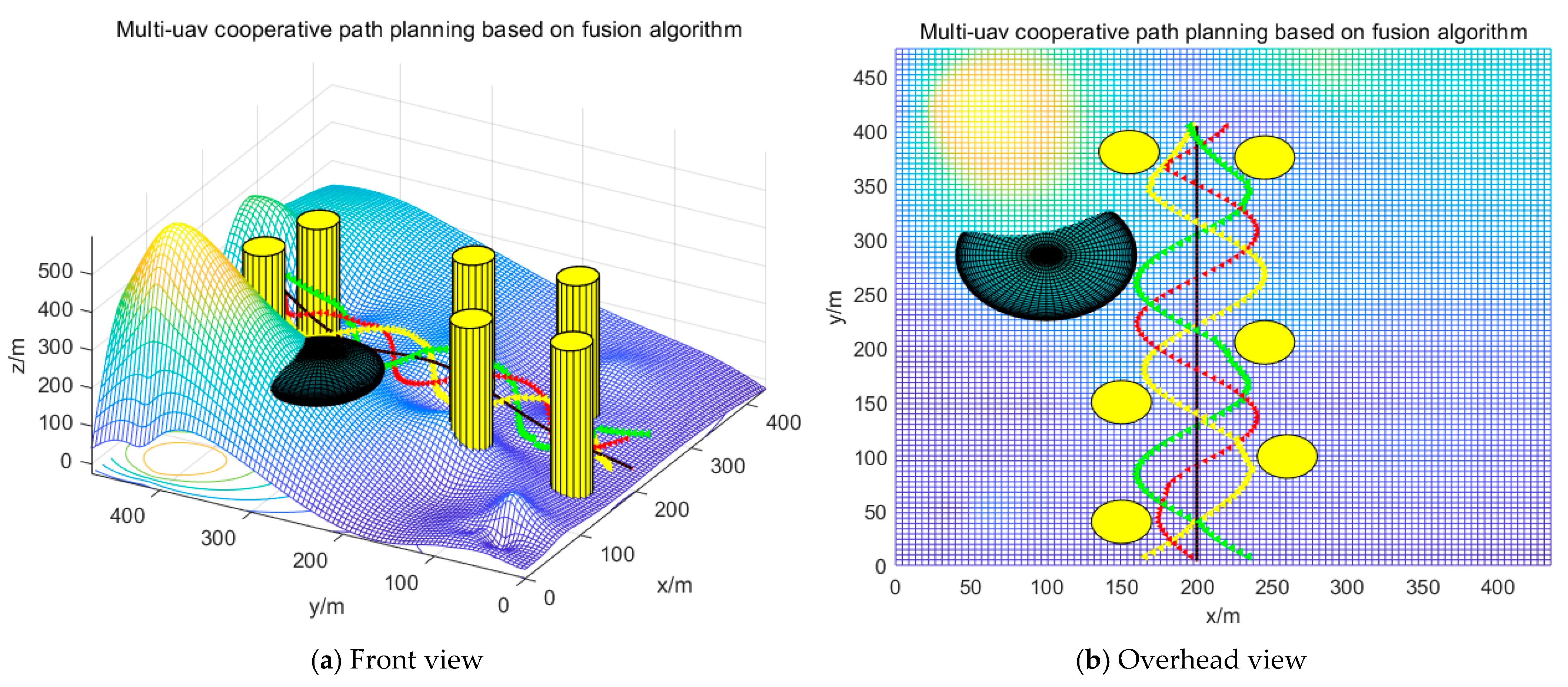
4. Simulation Verification
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, G.; Hu, M.; Yang, X.; Lin, P. Multi-UAV Cooperative Trajectory Planning Based on FDS-ADEA in Complex Environments. Drones 2023, 7, 55. [Google Scholar] [CrossRef]
- Li, B.; Gan, Z.; Chen, D.; Aleksandrovich, S. UAV Maneuvering Target Tracking in Uncertain Environments Based on Deep Reinforcement Learning and Meta-Learning. Remote Sens. 2020, 12, 3789. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P.; Kong, X. Design and Information Architectures for an Unmanned Aerial Vehicle Cooperative Formation Tracking Controller. IEEE Access 2018, 6, 45821–45833. [Google Scholar] [CrossRef]
- Li, B.; Yang, Z.P.; Chen, D.Q.; Liang, S.Y.; Ma, H. Maneuvering target tracking of UAV based on MN-DDPG and transfer learning. Def. Technol. 2021, 17, 10. [Google Scholar] [CrossRef]
- Bian, L.; Sun, W.; Sun, T. Trajectory Following and Improved Differential Evolution Solution for Rapid Forming of UAV Formation. IEEE Access 2019, 7, 169599–169613. [Google Scholar] [CrossRef]
- Liu, W.; Zheng, X.; Luo, Y. Cooperative search planning in wide area via multi-UAV formations based on distance probability. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 1072–1077. [Google Scholar] [CrossRef]
- Li, Y.; Tian, B.; Yang, Y.; Li, C. Path planning of robot based on artificial potential field method. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; pp. 91–94. [Google Scholar] [CrossRef]
- Liang, Q.; Zhou, H.; Xiong, W.; Zhou, L. Improved artificial potential field method for UAV path planning. In Proceedings of the 2022 14th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Changsha, China, 15–16 January 2022; pp. 657–660. [Google Scholar] [CrossRef]
- Zong, C.; Yao, X.; Fu, X. Path Planning of Mobile Robot based on Improved Ant Colony Algorithm. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing China, 17–19 June 2022; pp. 1106–1110. [Google Scholar] [CrossRef]
- Gao, Y. An Improved Hybrid Group Intelligent Algorithm Based on Artificial Bee Colony and Particle Swarm Optimization. In Proceedings of the 2018 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), Hunan, China, 10–11 August 2018; pp. 160–163. [Google Scholar] [CrossRef]
- Ma, F.; Lu, J.; Liu, L.; He, Y. Application of Improved Single Neuron Adaptive PID Control Method in the Angle Predefined Loop of Active Radar Seeker for Anti-radiation Missile. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 2160–2164. [Google Scholar] [CrossRef]
- Xingke, L.; Xuesong, C.; Shuting, C. Smoothing Method for Nonlinear Optimal Control Problems with Inequality Path Constraints. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 5350–5353. [Google Scholar] [CrossRef]
- Anastasiou, D.; Nanos, K.; Papadopoulos, E. Robust Model-based H∞ control for Free-floating Space Manipulator Cartesian Motions. In Proceedings of the 2022 30th Mediterranean Conference on Control and Automation (MED), Vouliagmeni, Greece, 28 June–1 July 2022; pp. 598–603. [Google Scholar] [CrossRef]
- Yu, L.; He, G.; Wang, X.; Zhao, S. Robust Fixed-Time Sliding Mode Attitude Control of Tilt Trirotor UAV in Helicopter Mode. IEEE Trans. Ind. Electron. 2022, 69, 10322–10332. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Sahu, A.; Kandath, H.; Krishna, K.M. Model predictive control based algorithm for multi-target tracking using a swarm of fixed wing UAVs. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1255–1260. [Google Scholar]
- Ille, M.; Namerikawa, T. Collision avoidance between multi-UAV systems considering formation control using MPC. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 651–656. [Google Scholar] [CrossRef]
- Muslimov, T.Z.; Munasypov, R.A. Coordinated UAV Standoff Tracking of Moving Target Based on Lyapunov Vector Fields. In Proceedings of the 2020 International Conference Nonlinearity, Information and Robotics (NIR), Innopolis, Russia, 3–6 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Guo, Q.; Peng, J.; Xu, W.; Liang, W.; Jia, X.; Xu, Z.; Yang, Y.; Wang, M. Minimizing the Longest Tour Time Among a Fleet of UAVs for Disaster Area Surveillance. IEEE Trans. Mob. Comput. 2022, 21, 2451–2465. [Google Scholar] [CrossRef]
- Niu, Y.; Liu, J.; Xiong, J.; Li, J.; Shen, L. Research on cooperative ground multi-target guidance method for UAV swarm tracking. China Sci. Technol. Sci. 2020, 50, 403–422. [Google Scholar]
- Zhang, Y.; Fang, G.-W.; Yang, X.-X. Cooperative tracking of multiple UAVs under command decision. Flight Mech. 2020, 38, 28–33. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhou, R.; Dong, Z.-N.; Li, H. Two-machine cooperative standoff target tracking under angular measurement. J. Beijing Univ. Aeronaut. Astronaut. 2015, 41, 2116–2123. [Google Scholar] [CrossRef]
- Wang, D.; Wu, M.; He, Y.; Pang, L.; Xu, Q.; Zhang, R. An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sens. 2022, 14, 4501. [Google Scholar] [CrossRef]
- Wang, D.; He, T.; Zhou, F.; Cheng, J.; Zhang, R.; Wu, Q. Outage-driven link selection for secure buffer-aided networks. Sci. China Inf. Sci. 2022, 65, 182303. [Google Scholar] [CrossRef]
- Parisio, A.; Rikos, E.; Glielmo, L. A Model Predictive Control Approach to Microgrid Operation Optimization. IEEE Trans. Control. Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- Dantec, E.; Taix, M.; Mansard, N. First Order Approximation of Model Predictive Control Solutions for High Frequency Feedback. IEEE Robot. Autom. Lett. 2022, 7, 4448–4455. [Google Scholar] [CrossRef]
- Harinarayana, T.; Hota, S. Coordinated Standoff Target Tracking by Multiple UAVs in Obstacle-filled Environments. In Proceedings of the 2021 Seventh Indian Control Conference (ICC), Mumbai, India, 20–22 December 2021; pp. 111–116. [Google Scholar] [CrossRef]
- Song, R.; Long, T.; Wang, Z.; Cao, Y.; Xu, G. Multi-UAV Cooperative Target Tracking Method using sparse A search and Standoff tracking algorithms. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Abedini, A.; Bataleblu, A.A.; Roshanian, J. Robust Backstepping Control of Position and Attitude for a Bi-copter Drone. In Proceedings of the 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 17–19 November 2021; pp. 425–432. [Google Scholar] [CrossRef]
- Cheng, Z.; Zhao, L.; Shi, Z. Decentralized Multi-UAV Path Planning Based on Two-Layer Coordinative Framework for Formation Rendezvous. IEEE Access 2022, 10, 45695–45708. [Google Scholar] [CrossRef]
- Wang, D.; Zhou, F.; Lin, W.; Ding, Z.; Al-Dhahir, N. Cooperative Hybrid Non-Orthogonal Multiple Access Based Mobile-Edge Computing in Cognitive Radio Networks. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1104–1117. [Google Scholar] [CrossRef]
- Shaowu, D.; Chaolun, Z.; Fei, L.; Xu, H.; Guorong, Z. A model predictive control algorithm for UAV formations under multiple constraints. Control. Decis. Mak. 2023, 38, 706–714. [Google Scholar] [CrossRef]
- Fuchun, L.; Huanli, G. Research on model predictive control algorithms for small unmanned helicopters. Control. Theory Appl. 2018, 35, 1538–1545. [Google Scholar]
- Haiou, L.; Yuxuan, H.; Qingxiao, L.; Shihao, L.; Huiyan, C.; Li, C. Research on the search strategy of different detection distance sensors. J. Beijing Univ. Technol. 2023, 43, 151–160. [Google Scholar] [CrossRef]
- Fan, G.; Zhao, Y.; Guo, Z.; Jin, H.; Gan, X.; Wang, X. Towards Fine-Grained Spatio-Temporal Coverage for Vehicular Urban Sensing Systems. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Wang, H.; Liu, C.H.; Dai, Z.; Tang, J.; Wang, G. Energy-Efficient 3D Vehicular Crowdsourcing for Disaster Response by Distributed Deep Reinforcement Learning. In Proceedings of the 27th ACM SIGKDD Conference on Knowledge Discovery & Data Mining (KDD ‘21), Washington, DC, USA, 14–18 August 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 3679–3687. [Google Scholar] [CrossRef]
- Cao, Y.; Cheng, X.; Mu, J. Concentrated Coverage Path Planning Algorithm of UAV Formation for Aerial Photography. IEEE Sens. J. 2022, 22, 11098–11111. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Parameters Name | Parameter Value |
|---|---|---|
| 1 | UAV1 starting position | (200 m, 5 m, 115 m) |
| 2 | UAV2 starting position | (160 m, 5 m, 75 m) |
| 3 | UAV3 starting position | (240 m, 5 m, 75 m) |
| 4 | Target starting position | (200 m, 5 m, 95 m) |
| 5 | UAV initial speed | 25 m/s |
| 6 | UAV speed range | [20 m/s, 40 m/s] |
| 7 | Maximum yaw angle of UAV | π/4 rad |
| 8 | Maximum pitch angle of UAV | π/4 rad |
| 9 | Minimum turning radius for UAV | 10 m |
| 10 | Number of UAVs | 3 |
| 11 | Maximum speed constraint for UAVs | 40 m/s |
| 12 | Minimum speed constraint for UAVs | 10 m/s |
| 13 | Maximum angular velocity constraint for UAVs | 0.25 rad/s |
| Serial Number | Coordinate Position | Radius Size of Obstacle |
|---|---|---|
| 1 | (100 m, 270 m, 250 m) | 50 m |
| 2 | (200 m, 300 m, 250 m) | 50 m |
| UAV Category | Usage | Effective Number of Detected Steps (Scene 1-Total: 100) | Effective Number of Detected Steps (Scene 2-Total: 100) | Effective Number of Detected Steps (Scene 3-Total: 100) |
|---|---|---|---|---|
| UAV1 | Fusion algorithm | 100 | 100 | 100 |
| Model predictive control algorithm | 100 | 100 | 100 | |
| UAV2 | Fusion algorithm | 89 | 88 | 92 |
| Model predictive control algorithm | 86 | 84 | 88 | |
| UAV3 | Fusion algorithm | 97 | 95 | 95 |
| Model predictive control algorithm | 82 | 80 | 81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Song, C.; Bai, S.; Huang, J.; Ma, R.; Wan, K.; Neretin, E. Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff. Drones 2023, 7, 196. https://doi.org/10.3390/drones7030196
Li B, Song C, Bai S, Huang J, Ma R, Wan K, Neretin E. Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff. Drones. 2023; 7(3):196. https://doi.org/10.3390/drones7030196
Chicago/Turabian StyleLi, Bo, Chao Song, Shuangxia Bai, Jingyi Huang, Rui Ma, Kaifang Wan, and Evgeny Neretin. 2023. "Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff" Drones 7, no. 3: 196. https://doi.org/10.3390/drones7030196
APA StyleLi, B., Song, C., Bai, S., Huang, J., Ma, R., Wan, K., & Neretin, E. (2023). Multi-UAV Trajectory Planning during Cooperative Tracking Based on a Fusion Algorithm Integrating MPC and Standoff. Drones, 7(3), 196. https://doi.org/10.3390/drones7030196