1. Introduction
Cooperative control for multi-agent systems (MASs) has attracted attention from researchers worldwide owing to its broad application in various fields, such as robots [
1,
2], unmanned aerial vehicles [
3,
4], unmanned underwater vehicles [
5,
6], and smart grids [
7,
8], just to name a few. Many efforts have been devoted to the fundamental consensus problem in MAS cooperation control [
9,
10,
11]. The consensus control problem for Markov jumping MASs under undirected graphs is also widely studied [
12,
13]. It should be noted that synchronous control and formation control, which are widely used in practical systems to greatly improve the capacity and efficiency of the system, such as synchronous control of multiple electrohydraulic actuators [
14] and formation control of multiple UAVs [
15], can be translated into the consensus tracking control problem for MASs. This problem generally falls into two categories: leader–follower consensus (also called consensus tracking) and leaderless consensus. The work [
16] proposes a distributed containment control strategy for MASs to cope with composite attacks, which is based on the leader–follower architecture and combined with the Luenberger observer. Distributed leaderless model-independent consensus control of multiple Euler–Lagrange systems was studied in [
17]. The work [
18] developed a leaderless consensus tracking control strategy for multiple quadrotor systems with bounded disturbances in a directed topology.
Finite-time control strategies typically have higher control accuracy, better robustness, and faster convergence to the equilibrium than asymptotic control strategies [
19]. Moreover, in many practical applications, the finite-time stabilization makes more sense than asymptotic stabilization, such as in the orbiting state of satellite systems and other applications that focus on the state behavior over a finite period [
20], and the trajectory control of spacecraft and other such applications that need to maintain the system’s state within a specific time frame without exceeding a predetermined bound [
21]. Therefore, the finite-time consensus tracking problem for MASs has attracted much attention [
22,
23,
24]. For instance, a nonlinear finite-time consensus control protocol based on continuous state feedback was developed for single-integrator MASs with directional link failure in [
25]. For second-order MASs, the finite-time consensus tracking control protocols based on the terminal sliding mode method were presented in [
1,
26,
27]. In the work [
28], the finite-time nonlinear consensus protocols were constructed based on a novel sliding surface design for each double-integrator MAS. A consensus tracking control based on a time-varying function approach for the second-order MASs under signed directed topology structures was proposed in [
29]. The output consensus control of high-order MASs with external disturbances under directed networks was investigated in [
30]. Combined with the recursive method, a finite-time consensus control strategy was designed for a class of high-order MASs in [
31].
To cope with the unknown disturbances and relax the assumption of disturbances, two types of barrier functions (a positive definite barrier function and a semi-positive definite barrier function) were given for the first time. An adaptive control strategy was designed for the first-order system to avoid excessive control gains in [
32]. Based on this, a series of sliding mode controllers based on barrier functions were developed [
33,
34,
35]. In the work [
36], a distributed control scheme based on the barrier function was devised for second-order systems. Nevertheless, the estimation and compensation of disturbances were not considered.
Although effective, the above works require the input of the full states of MASs. In case of limited states, where full states are unmeasurable or unavailable, several methods have been developed to solve the consensus tracking problem for MASs with limited state measurements. The work [
37] proposed a finite-time consensus tracking control strategy on account of output feedback for second-order MASs. However, the reference signals need to meet specific dynamics. An output feedback-based consensus tracking control protocol for a class of second-order MASs with an undirected graph was designed without consideration of the uncertainties and disturbances in [
38]. In the work [
39], a distributed adaptive control scheme employing the extended state observer was devised to achieve consensus tracking for second-order underactuated MASs under an undirected graph. Unfortunately, the uncertainties and disturbances of MASs were not considered in either study. The uncertain second-order MASs without velocity measurements were considered in [
40], where the corresponding distributed robust controller based on the uncertainty and disturbance estimator was designed to realize the consensus tracking (synchronization) of MASs. However, asymptotic convergence can only be guaranteed when the derivatives of the disturbances satisfy specific conditions. In the work [
41], the proposed finite-time consensus control protocols also required additional assumptions about the derivatives of disturbances. It should be noted that the state estimation techniques involved in the above methods all suffer from the contradiction between steady-state accuracy and transient performance. To alleviate this problem, Khalil designed a cascaded high-gain observer that uses saturation constraints, making it possible to avoid transient peak effects while ensuring estimation accuracy [
42].
This paper is motivated by the need to address the challenges regarding the uncertainty and disturbance of MASs. The finite-time consensus control design problem is studied for uncertain high-order MASs with either full-state measurements or unmeasurable intermediate states under an undirected communication graph. Compared with the existing literature, the original contributions of this paper can be summarized as follows:
(1) A distributed finite-time adaptive disturbance observer is designed based on the barrier function. Then, the neighbor-based finite-time adaptive consensus tracking control protocols are developed. The proposed approach does not require additional assumptions on the existence and boundness of the derivatives of the lumped disturbances (which include model uncertainties and external disturbances).
(2) The cascade high-gain observer is first introduced into the proposed finite-time consensus tracking control framework based on the barrier function while retaining its original performance advantages. For the case of a MAS without intermediate state measurements, the finite-time bounded consensus between the leader and followers is guaranteed. Moreover, the ultimate error bounds can be monotonously adjusted by the designed perturbation parameter.
(3) The proposed strategy is suitable for heterogeneous MASs to account for the different dynamics of each agent. Moreover, the designed control scheme can be applied to solve the robust cooperative control problem of multiple UAVs.
The remainder of this paper is organized as follows.
Section 2 gives the problem statement. Finite-time adaptive consensus tracking control protocols are shown in
Section 3.
Section 4 analyzes stability of the closed-loop system. Two simulation cases are provided in
Section 5 to verify the theoretical findings. Finally,
Section 6 concludes the paper.
2. Problem Statement
2.1. Notations and Preliminaries
The information interaction topology among n agents is described by a graph, which can be denoted as . Here, represents the set of N nodes, the node () denotes the i-th agent, and is the sets of edges. In this paper, the edge means the node is a neighbor of the node , and they can receive information from each other. Hence, the graph is undirected; that is, if , is also established. The set of all the neighbors of the node is a subset of and can be denoted as . If there is a sequence of ordered edges , the set composed of the above edges can be regarded as a path from the node to node . The graph has a spanning tree if all other nodes can be reached from a certain node called the root node. Moreover, if there is a path between any two different nodes, the graph is connected. The adjacency matrix of the graph is , where if , otherwise . The in-degree matrix , where . The Laplacian matrix of a graph is , which satisfies . Suppose there is a virtual leader indexed as a node 0. The adjacency matrix of the leader is denoted as , where if the i-th agent can directly receive the leader’s information; otherwise, . denotes the standard symbolic function, denotes the standard unity saturation function, and holds. The symbol ⊗ denotes the Kronecker product, the n-th derivative of x, the Euclidean norm, the infinite norm, and the absolute value.
2.2. Problem Formulation
The dynamics of the
i-th (
) agent is described as follows:
where
is the system state,
is the measurable system output,
and
are the continuously differentiable bounded nonlinear functions of known structure,
is the control input,
is the uncertainty and disturbance of the system, and matrices (
,
and
) are given as follows:
Remark 1. By selecting different dimensions of the state/input matrix in Equation (1), real physical objects, such as a quadrotor, robot, or manipulator, can be described. For example, the position model of a quadrotor can be linearized [43] in a second-order system, where and . In this paper, some assumptions are made as follows.
Assumption 1. The uncertainty and disturbance is bounded, which satisfieswhere is an unknown non-negative constant. Assumption 2. The virtual leader is a unique system that acts as a reference command generator giving commands to partial followers of the networked group.
Assumption 3. The static undirected digraph is connected and contains a spanning tree with the virtual leader as the root node.
Assumption 4. The reference signal is continuously differentiable up to its i-th derivative, and there exists for all such that Remark 2. Assumption 4 is proposed to ensure that the desired trajectories are smooth enough to avoid actuator saturation due to sudden jumps caused by discontinuous control inputs.
The following definitions and lemmas are also used to solve the consensus control problem.
Definition 1 ([
32]).
Define the barrier function as an even continuous function : strictly increasing on , where is assumed given and fixed,Define the positive definite barrier function as followswhere p is a positive constant. Remark 3. By definition, the value of the barrier function tends toward infinity as the function variable approaches the bound, which means that when the barrier function remains bounded, the variable x will always remain within the bound , and the value of the barrier function will adjust dynamically with the change of the variable x (i.e., parameter adaptive adjustment), and its positive definiteness also provides support for the development of Lyapunov-based control methods.
Lemma 1 ([
44]).
Assuming that at least one follower in the connected undirected graph can receive reference commands from the virtual leader, then is a positive definite matrix. Lemma 2 ([
32]).
Consider the following systemwhere is bounded and satisfies , the bound exists and can be unknown.If the control input of system (6) isandwhere , and is a positive constant. Then, the variable of the system (6) will converge to the domain in a finite time , where satisfies Lemma 3 ([
45]).
Consider the following high-order systemSuppose that is chosen such that the polynomial is Hurwitz, and is given byFor , there exists such that the system (10) states converge to zero in finite time under the action of the following control law Definition 2 ([
40]).
The MASs are considered to approach consensus tracking if for any ,orwhere and are the corresponding settling time, is a sufficiently small design parameter to be determined, and is a class function with respect to ε. Remark 4. By the definition of finite-time stability in [46], consider a system: , where , , and . Suppose that there exists a continuous positive definite function , such that (), for some real numbers and . Then, the origin is a globally finite-time stable equilibrium and the settling time is This paper aims to design a distributed controller so that the outputs described by the system (1) approach consensus with that of the virtual leader in a finite time under the conditions of Assumptions 1–4.
4. Stability Analysis
First, we consider the situation where all system states can be measured. The stability and performance of the closed-loop system are investigated as follows.
Theorem 4. Consider the MASs (1) under a connected undirected graph and Assumptions 1–4, and suppose that all system states are measurable and available. Suppose the distributed controllers are designed as (19)–(23), which are employed as the control inputs. Moreover, the disturbance observers are designed as (26)–(29) to estimate the uncertainties and disturbances of the MASs (1). Then, the stability of the closed-loop systems is guaranteed, and the objective (13) can be achieved. The MASs can achieve consensus tracking in a finite time .
Proof. Take the derivative of
(15) with respect to time
t up to its
n-th derivative, yields
Considering system (1) and substituting (19) into (59), one can obtain
From (20)–(23), (30), and (60), it can be derived that
According to Lemma 4, we have
for all
. Then, the above Equation (61) can be simplified to
Taking the first-order time derivative of Equation (62) and combining (21) yields
For
, according to (22), the above Equation (63) can be rewritten as:
From (22), Lemmas 2 and 4, we can conclude that the sliding surface
is asymptotically converging in a finite time
,
where
and
.
In the light of (23) and Lemma 3, it can be concluded that
for
, we can then derive that
converge to zero in a finite time
, which is defined as
. Hence, the consensus errors
e defined in (16) converge to zero in a finite time
. From (15)–(18) and Lemma 1, one can get
and it can be derived that
It can be obtained that
can converge to zero in finite time
. Hence, the objective (13) can be achieved.
For
, the boundedness of the consensus errors
e and tracking errors
will be proved. According to Lemma 4, we can find that disturbance estimation errors
are bounded. From (21), we have
. When the control inputs
satisfy
then
. In the light of (21) and (22), it can be concluded that
and
hold.
Similarly, in the case that
we have
. Then,
and
hold. Therefore, we can conclude that
Moreover, we can get
From (15) and (23), we have
Since
and
are bounded, and considering Lemma 3 and the input-to-state stability [
53], it can be concluded that the consensus errors
e are bounded. Furthermore, according to (70), it can be derived that the tracking errors
are also bounded. The proof is completed. □
Corollary 1. Consider the MASs (1) under a connected undirected graph and Assumptions 1–4 and suppose that all system states are measurable and available. Then, under the distributed control law (19), the consensus tracking and the closed-loop system stability are still guaranteed by introducing a sufficiently slight time delay τ in the neighbor’s control input .
Proof. Consider introducing a time delay
in the neighbor’s control input
, then the distributed control law
can be rewritten as
Substituting (76) into (1) and combining (60) yields
For , it should be noted that . For , we can find that . Moreover, by Theorem 4, we can obtain that for all t, the consensus error e and are bounded. Therefore, is bounded for given the bounded initial variables and the related definitions of the functions (21), (28) and (76). Further, it can be derived by iterative substitution that and are bounded. Hence, it can be observed that is bounded.
From (20)–(23), (30) and (77), one obtains
After a derivation similar to the process of proving Theorem 4, we can get
For
, we have
where
satisfies that
Hence, the consensus tracking and the closed-loop system stability are guaranteed by introducing a sufficiently slight time delay . □
Next, the closed-loop stability and performance of high-order multi-agent systems without intermediate state measurements are analyzed as follows.
Theorem 5. Consider the MASs (1) under a connected undirected graph , Assumptions 1–4, and the assumption that the intermediate states of the system are unmeasurable. If the distributed controllers are designed as (43)–(48), the distributed cascade high-gain observers are designed as (35)–(40) to estimate the unmeasurable intermediate states, and the disturbance observers are designed as (49)–(52) to estimate the uncertainties and disturbances of the MASs (1). Then, the stability of the closed-loop systems is guaranteed, and the consensus errors e can converge to the domain S within a finite time . Moreover, the objective (14) can be achieved.
Proof. Considering the system (1) and (59), under the action of the control input
, yields
Substituting (43) into (82) and combining (54) and (55), one can get
where
and
.
Combining (44), (48), (56), (57) and (83), it can be derived that
According to Theorem 3, for all
, it can be concluded that
Then, we have
for all
.
Taking the derivative of (86) with respect to time
t and combining (46) and (47), one can obtain
for
.
In the light of Lemmas 2 and 4, and Theorem 4, we can deduce that the sliding surface
is asymptotically converging in a finite time
,
where
and
.
According to (48) and Theorem 3, we can get
Further, we can derive that
Given the definition
in (15) and (45), the above Equation (92) can be rewritten as:
Considering the singular perturbation theory and Lemma 5, the state estimation error system can be regarded as a fast time-varying system and the consensus error system as a slowly time-varying system. Hence, when the singular parameter
,
. In addition, owing to Lemma 3, we can obtain that the reduced system
is exponentially stable at the origin.
If
, the consensus error system can be expressed as:
The system (95) can be rewritten as:
where
Define
, it can be found that
Furthermore, we define
. According to Lemma 3, we have
, and
Given Lemma 5 and (97)–(99), it can be concluded that
where
.
Then, there exists
so that for all
,
is uniformly ultimately bounded and the ultimate bound is proportional to
. From the input-to-state stability and (96), it can be derived that
where
is a
-class function, and the finite time
is defined as
. According to (70), we can get
and
. Then, the objective (14) is achieved.
For , the proof of the boundedness of a closed-loop system is similar to that in Theorem 4. This ends the proof. □
Remark 9. The analysis of introducing a sufficiently short time delay τ in the term of (43) is similar to Corollary 1. Therefore, it will not be repeated. Similarly, the bounded consensus tracking and the closed-loop system stability are still guaranteed.
Remark 10. To reduce the chattering effect induced by the discontinuous , it can be approximated and replaced by a continuous function in this paper, where a is a large positive constant.
Remark 11. It should be noted that when the number of followers is large enough, as mentioned in [54], it will greatly increase the computational burden of the system, and the reasonable cluster processing is expected to alleviate this problem. Remark 12. The undirected graph’s adjacency matrix is symmetrical compared with the directed graph. Considering what is mentioned in [55], additional adaptation laws, parameterized estimation, and nonlinearities are applied to cope with adaptive consensus-controlled directed communication topologies, which complicates their application due to the need for additional hardware and software resources. Therefore, this paper considers the control design for high-order MASs under undirected graphs. However, directed graphs have an advantage over undirected graphs in terms of security. Inspired by this, it is meaningful to improve the proposed scheme to make it applicable to the case of directed graphs in future work as much as possible without increasing the complexity. 5. Numerical Examples
In this section, two numerical examples demonstrate the effectiveness of the proposed finite-time adaptive consensus tracking control strategy in
Section 3. Moreover, numerical simulation comparison results with the control method proposed in [
56] are presented. A multi-agent system with one virtual leader (indexed as a node 0) and four followers is considered in the simulation.
Figure 1 shows the communication topology among agents.
Then, the Laplacian matrix of the graph
and the adjacency matrix of the leader are given as follows:
5.1. Case 1: All States of the Multi-Agent System Are Measurable
In this case, we aim to verify the effectiveness of the finite-time adaptive consensus tracking control scheme based on the barrier function. Let the dynamics of the virtual leader be
. The followers are described by the uncertain third-order nonlinear systems (
) in the form of (1) with
,
,
,
,
,
,
,
. The lumped disturbances of followers are
,
,
, and
. The parameter settings involved in the proposed control scheme (19) are presented in
Table 1.
The initial conditions are selected as follows: , , , , , , , , , , , and (). The fundamental sample time is set as s.
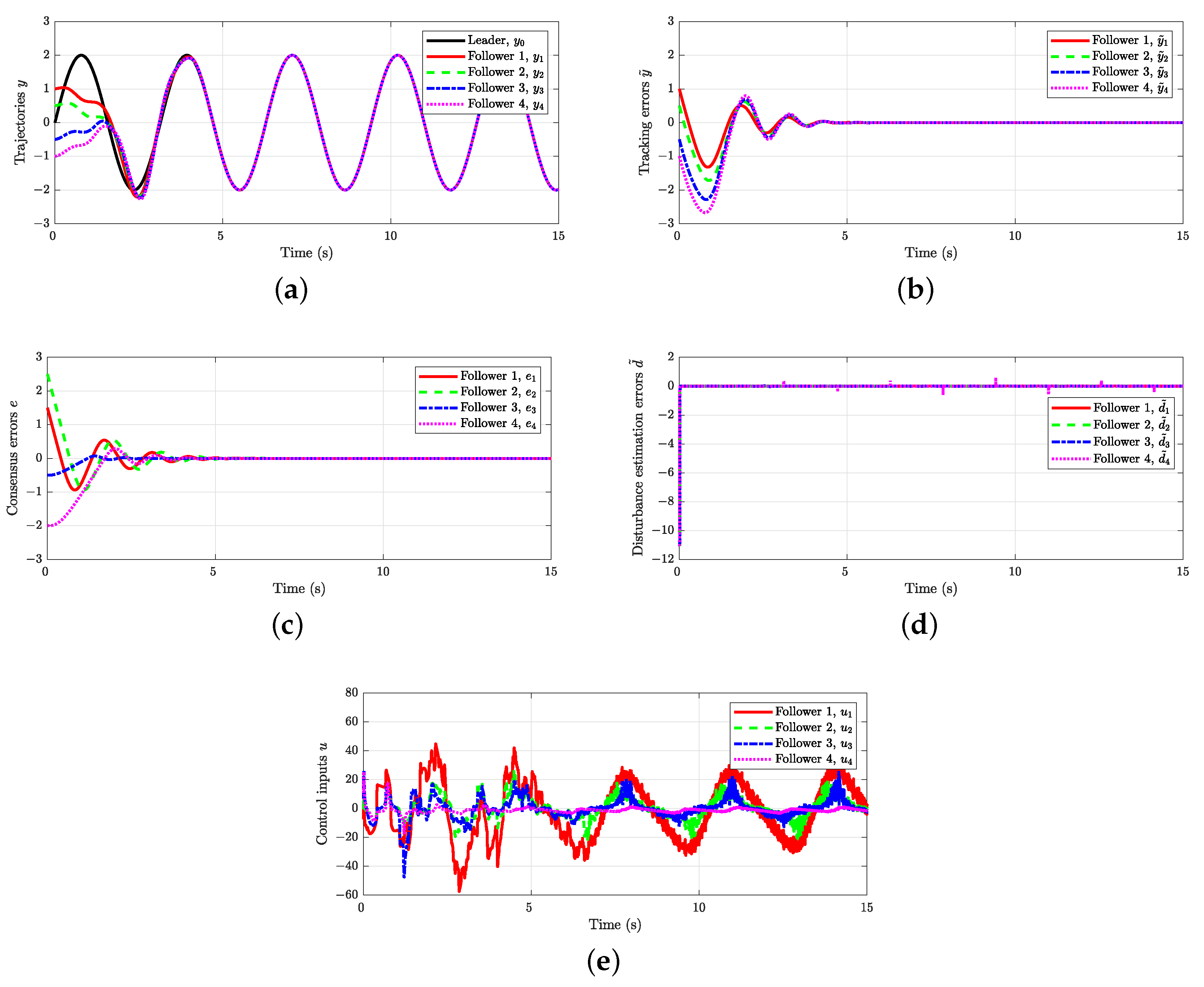
The simulation results under the action of the control protocol proposed in (19) are presented in
Figure 2. It can be seen from
Figure 2a–c that the finite-time consensus tracking of the uncertain high-order nonlinear MASs with the communication topology depicted in
Figure 1 can be achieved, which is consistent with the control objective (13) and the results presented in Theorem 4. From
Figure 2d, the lumped disturbance of each agent can be effectively estimated by the proposed distributed disturbance observer based on the barrier function, and the disturbance estimation errors can approach zero. Moreover, the control inputs of followers are indicated in
Figure 2e.
Furthermore, to evaluate the performance advantage of the proposed control method for the consensus tracking of multi-intelligent systems in this case, a simulation comparison with the state feedback-based method developed in [
56] is considered. Here, the root mean square (RMS) values of steady-state tracking errors and consensus errors are considered as key performance indicators for evaluating the control performance. The RMS value is defined as follows:
where
M is the simulation step number and
is the step number at the start of sampling.
Figure 3 and
Table 2 illustrate the simulation comparison results of tracking and consensus errors. The simulation results of the method proposed in this paper are shown as solid lines, and the results of the method in [
56] are shown as dashed lines, with different colors representing different followers. It can be observed from
Figure 3 that the steady-state tracking errors and consensus errors under the action of the proposed method are much more minor than the results of the state feedback-based control method in [
56]. Furthermore, it is validated by the results in
Table 2, and the RMS values of the errors are at least three orders of magnitude better than those of the state feedback-based control method in [
56].
5.2. Case 2: Intermediate States of the Multi-Agent System Are Unavailable
This example is to verify the effectiveness of the proposed finite-time adaptive consensus tracking controller based on the cascaded high-gain observer under the condition of unmeasurable intermediate states of MASs. The selection of control parameters and initial conditions are the same as that of Case 1. The parameters of the distributed cascade state observer are selected as:
,
,
,
,
,
(
). Different parameters
are selected to verify the control objective (14); that is, the smaller the parameter
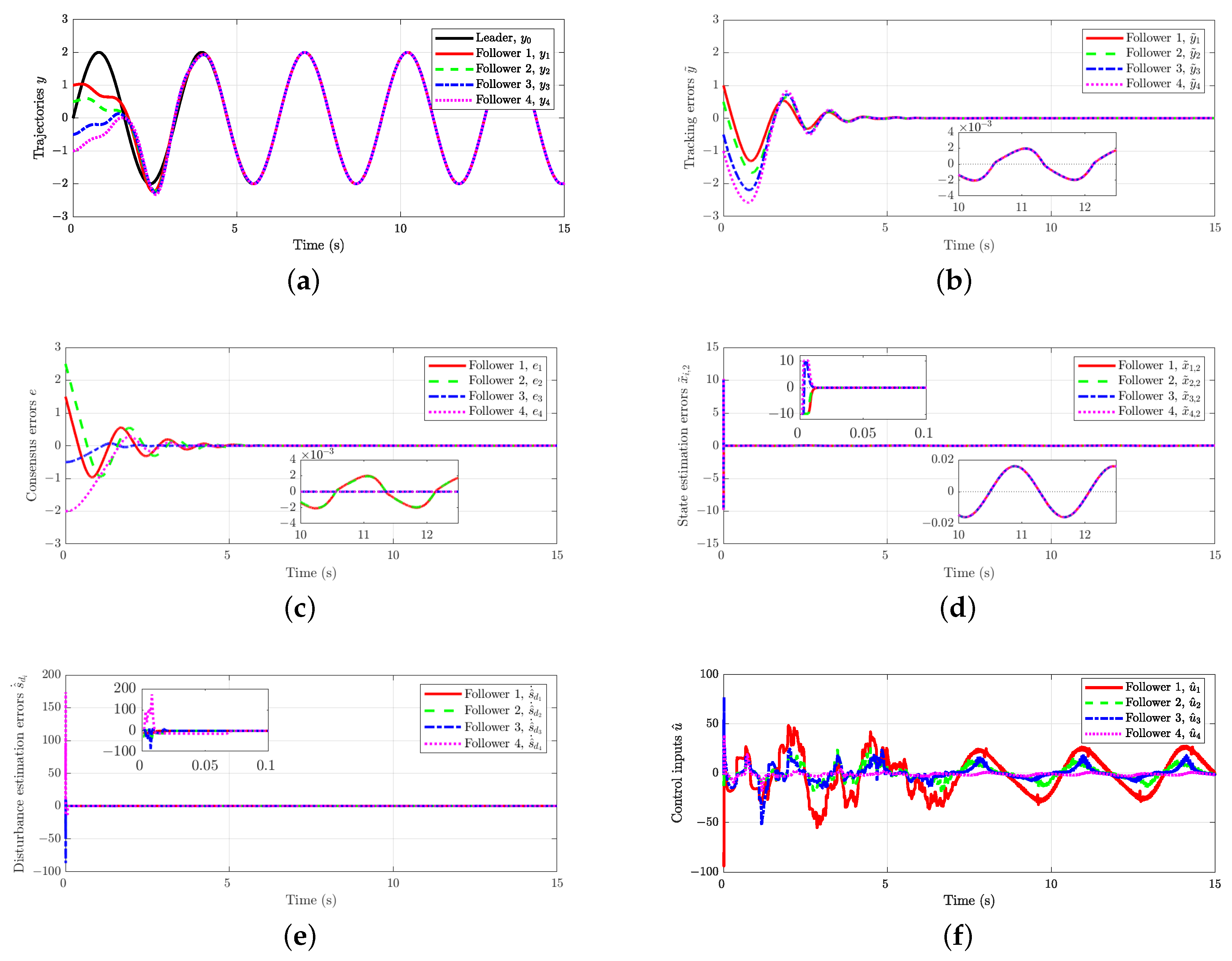
is, the smaller the ultimate bounds of state estimation errors, consensus errors, and tracking errors. The response results of the closed-loop system are depicted in
Figure 4 and
Figure 5. We can see from
Figure 4a and
Figure 5a that all followers are able to fast track the leader’s trajectory. By comparing
Figure 4b–d and
Figure 5b–d, it can be found that the smaller the parameter
, the smaller the ultimate bounds of state estimation, tracking, and consensus errors. This conclusion is aligned with the control objective (14) and theoretical findings. The lumped disturbance estimation errors and control inputs of each follower are indicated in
Figure 4e,f and
Figure 5e,f, respectively.
In this case, we also compare the simulation results of the proposed method with those of the high-gain observer-based control method in [
56]. The comparison results are depicted in
Figure 6 and
Table 3. We can see from
Figure 6 and
Table 3 that the simulation results under the action of the proposed method in this paper have an advantage of at least one order of magnitude over the results of the high gain observer-based method in [
56] in a steady-state performance. It should be noted that the state estimation errors under the action of the method in [
56] are smaller than those under the action of the proposed method, but the transient peaking phenomenon is quite obvious. Moreover, this paper achieves a reduction in the steady-state estimation error by reducing
.



_Zhu.png)







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}