1. Introduction
With the increasing importance and frequent economic activities in island regions, the planning and construction of an island’s logistics system have entered a period of rapid development. In the face of challenges such as bad weather and road disruption, how to transport emergency medical products and urgent living materials timely and safely to the island customers, and how to better control the total cost of the system while improving efficiency and safety. In recent years, the rapid development of drone and artificial intelligence technologies has made drones widely tested and even used in various fields [
1]. The advantages of drones, such as small body, fast speed, and freedom from terrain conditions, make it possible to replace traditional logistics methods to complete tasks more efficiently and effectively in some fields, e.g., emergency medical medicine delivery in disaster areas, agricultural pesticide spraying, field monitoring, power line patrol inspection, pastoral logistics distribution, etc. Many applications show that the research of drones in relevant fields is of great practical significance and commercial value [
2].
In emergency logistics, the environment is complex and the demands are unpredictable, resulting in the mismatching among demands, supplies, and predictions. As an emerging distribution method, using drones can shorten the delivery time and deliver to places that cannot be reached by traditional transportation methods such as islands, and isolated or remote customers [
1]. Drone-based distribution system incurs some advantages in emergency management: It can overcome various obstacles, quickly respond to emergency demands, and achieve accurate and efficient security; it has low cost and strong emergency capability, and can realize uninterrupted operations; it can adapt to challenging tasks, and achieve zero casualty rate in the distribution process. Distribution is a crucial link in emergency logistics and an important link that affects the response speed of the entire emergency system. Medical transport using drones can be used in urgent situations, where the main variable that has an impact on the success of life and health saving is the breaking of barriers to reaching difficult-to-reach places. In the context of the spread of the SARS-CoV-2 virus, drones may be used to provide diagnostic screening tests [
3], medicinal products, and septic materials, transport of samples [
4] of biological material, as well as information campaigns on how to deal with an epidemic, quarantine, or isolation at home [
5]. With the rapid development of drone-related technologies, the applications of drones have been greatly improved, and at the same time, more requirements and implementations have emerged. The applications of 5G, the Internet of Things, GPS, artificial intelligence, and other technologies, as well as the deployment of communication infrastructures, have brought broad application prospects for drones. With the exploration of some leading retailing and distribution companies, e.g., amazon.com, JD.com, and sf-express.com, drone-based logistics has been promoted and applied in practice, gradually entering people’s vision. Especially, using drones can better solve the uncertainty and timeliness of emergency logistics with its advantages.
Islands usually lack relatively developed road networks, while their transportation means are limited to roads [
6]. Moreover, some islands are far away from the mainland and are scattered, e.g., the eastern islands of Zhoushan in China, and the waterborne transportation routes between the islands and reefs are complicated. It is difficult for the islands to achieve their self-sufficient production and living needs. Due to the particularity and complexity of the geographical locations, an island is generally a closed system. When dealing with all kinds of disasters, an island has a prominent ecological and economic vulnerability, showing the characteristics of vulnerability, low self-regulation ability, and prominent disaster chain phenomenon. When the roads are damaged and impassable, the traditional truck and manual delivery methods are inefficient and difficult to be recovered timely, and the traditional logistics services are inaccessible. Rapid technological developments in autonomous unmanned aerial vehicles (UAV or drones) and evolving legislation may soon open the way for their large-scale implementation in the last-mile delivery of products [
7]. Drone-based delivery can play the advantage of ignoring the terrain, shortening the delivery time, and improving efficiency, and can be effectively used for post-disaster relief and emergency distribution. The drone-related technologies have also been made achievements and gradually improved to ensure delivery capabilities and efficiency [
8]. The application of drones will solve the bottleneck problems of high timeliness, high security, and high accuracy in the current island emergency logistics distribution.
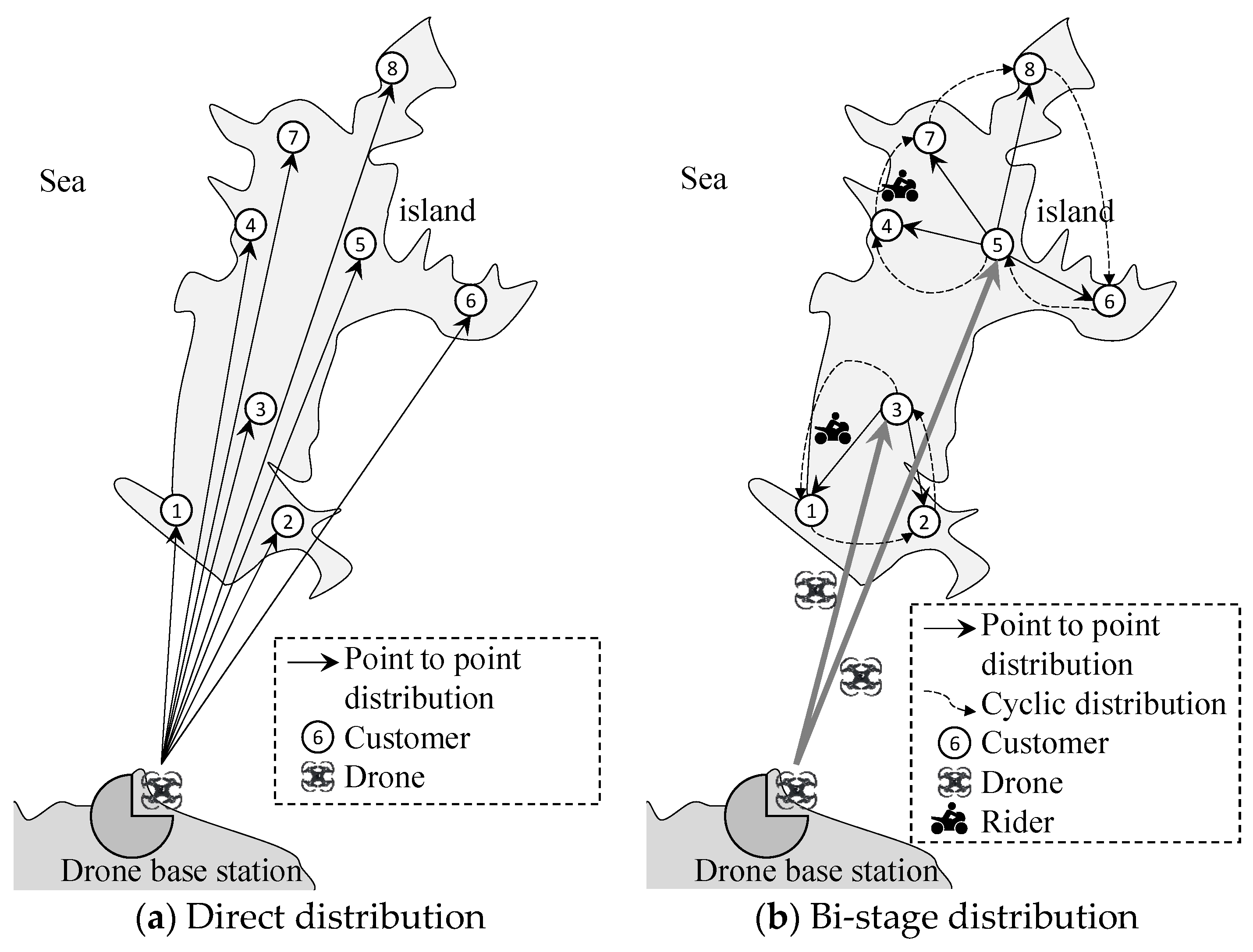
This paper mainly studied the application of drones in emergency distribution in islands. Although drones have significant advantages in logistics distribution, there are still many limitations, e.g., limited load capabilities, energy and charging problems, landing safety, and landing platforms. The drone-based island emergency logistics system studied in this paper consists of three echelons of components: the onshore drone base station, the island mediate distribution depots, and the island terminal customers. Since the landing of drones often requires a landing platform to ensure landing safety, and each landing platform has additional costs, this paper considers two distribution situations: direct and bi-stage distribution. In the direct mode, drones directly distribute packages to the customers from the offshore drone base station. In the bi-stage mode, drones distribute the packages from the drone base station to the island depots with landing platforms first, and then island riders distribute the packages to the customers by ground transportation. Riders are persons taking motorbikes or mopeds for last-mile distribution. Riders are generally familiar with the roads and traffic conditions. The bi-stage mode further consists of two sub-modes, bi-stage point-to-point, and cyclic distribution modes, where the cyclic mode optimizes the ground distribution routes compared to the point-to-point mode by using models and solution algorithms for the general traveling salesman problem (TSP). The three modes and their evaluation metrics are formulated, and solution methods are developed.
The rest sections are organized as follows.
Section 2 reviews the related studies on drone applications in emergency management and drone routing problems. Moreover, the incremental contributions to literature are elucidated. Then, we investigate the drone-based island emergency distribution problem, including the three distribution modes and evaluation metrics. In
Section 4, the three modes are formulated, and
Section 5 develops an iterative heuristic algorithm to solve the cyclic bi-stage distribution problem. We conducted a series of numerical experiments to examine the proposed models and algorithms in
Section 6. Finally, we conclude the study in
Section 7.
3. Problem Statement
3.1. The Problem
As depicted in
Figure 1, eight customers on an island are distributed by the nearby land freight terminal. First, the packages are distributed from the land terminal to the island terminal by cargo ships, generally motorboats, for an emergency. Then, the packages are distributed to the island customers by riders or other means. However, when it is foggy, windy, or there are other climate conditions not suitable for berthing and shipping, the emergency demands from the customers cannot be met. Due to the COVID-19 pandemic, vaccines, drugs, and medicine packages are urgent. Considering such conditions, it is beneficial to apply drones for island distribution.
In this study, we consider a drone base station at the original freight terminal, whose location is denoted by . The coordinate is denoted by . A set of customers are denoted by , indexed by generally. The distance between the customers are denoted by , and the straight distance from the station to the customer is .
3.2. Three Drone-Based Distribution Modes
Drones can be used in the scenario described in
Section 3.1. In the following, three solutions are developed considering drones in the island distribution scenario.
First, in the “direct distribution” mode, the drones take and send the packages to the customers directly, as depicted in
Figure 2a. Here, the scenario of island distribution is used as the same described in
Figure 1. As seen from these figures, the freight terminal in
Figure 1 is replaced by a drone base station in
Figure 2. The transportation means from the offshore to the island use drones other than ships. In this study, we consider the simplest direct distribution mode, where a drone serves a customer one time. In such a mode, the island distribution system can use drones of lower costs comparatively. However, each customer must install a drone landing platform to accept the packages from the drones.
The drone landing platform is similar to an express cabinet with a platform on top of it to accept packages dropped by drones, as depicted in
Figure 3. In the vertical view of the platform, it consists of an automatic door that will be opened when accepting and sensing a drone to drop packages onto it. There are graphics on the platform, and there are sensors attached to it. They can help drones to identify the platform (DLP) and locate the door to open for accepting the packages.
A DLP can be shared within a residential quarter or with some close neighbors. It also can be installed as an express cabinet at the same time, while it should be suitable for drones to locate and deliver packages. As a result, it will be costly and will occupy space.
Second, as depicted in
Figure 2b, an island distribution system can consist of two stages. In the first stage, the packages are distributed from the original terminal to some island DLPs by drones. In the second stage, the riders distributed the packages from the DLPs to the customers one by one, or the customers can go to the DLP and accept the packages from the cabinets. Because the packages are distributed from the DLPs to the customers one by one, we entitle this solution as a “Point-to-point bi-stage solution”.
Based on the second mode—“Point-to-point bi-stage distribution”, a specialized rider can be managed to distribute the packages to the customers in a cycle—visiting the customers sequentially for a DLP and finally returning to the DLP. This problem is famous as the TSP. This solution is beneficial when the batch of distribution consists of several packages to different customers.
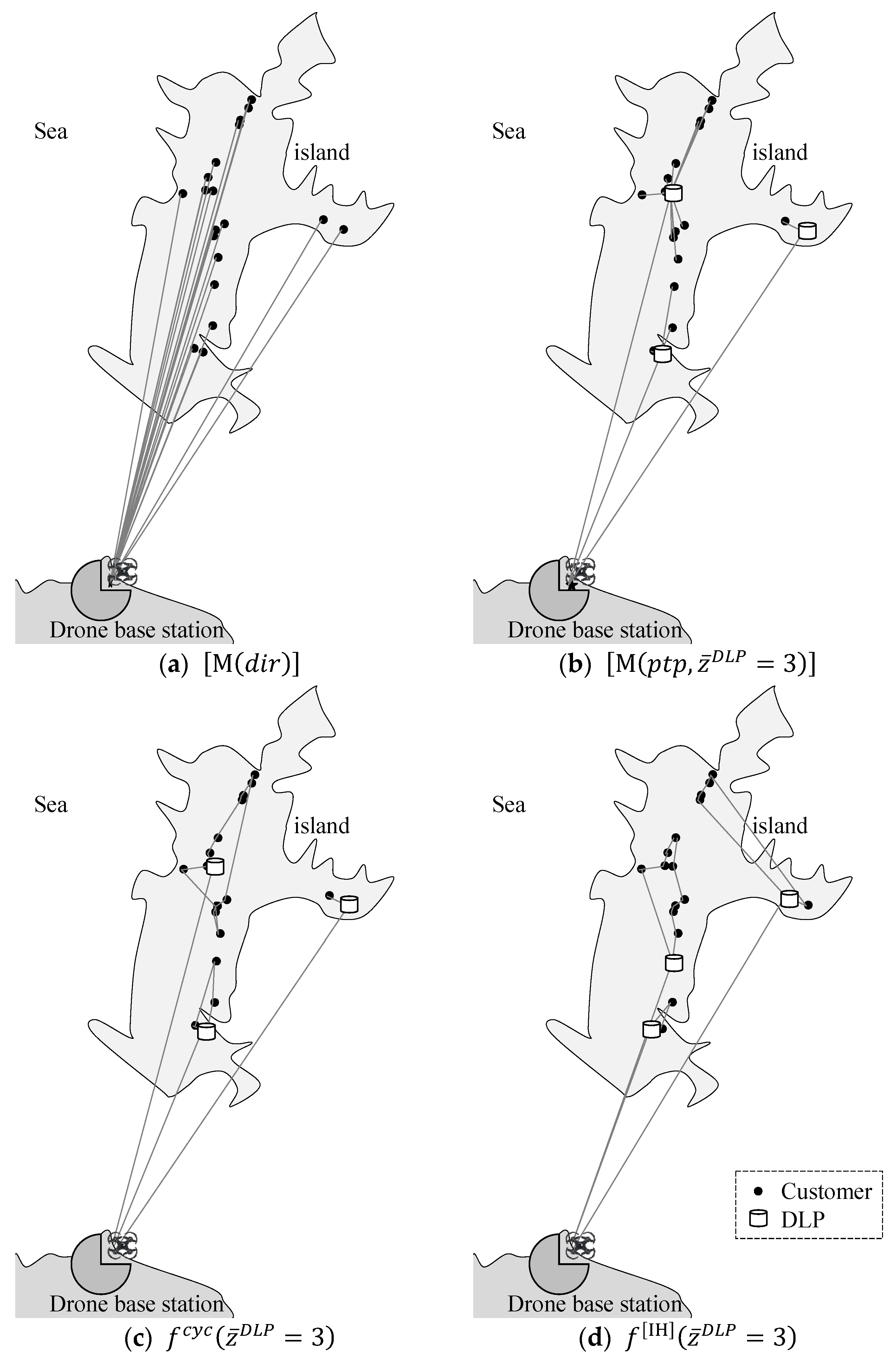
Three notations, , are used to represent the three drone-based distribution modes.
3.3. Distribution Mode Evaluation Metrics
As studied in
Section 3.1 and
Section 3.2, three solutions incur different strategies for using drones, riders, and DLPs. To evaluate these solutions, four metrics are developed as follows.
(1) Drone cost (). In the “direct distribution” solution, the distribution system can use drones with smaller load capacities because a drone is used to distribute packages to a single customer. In the “Point-to-point” or “Cyclic” “bi-stage distribution” solutions, a drone is used to distribute packages to a group of customers. As a result, drones with larger load capacities should be considered. It is a capacity decision-making problem and will not be studied mathematically or experimentally in this study. The comparison study contributes to the knowledge of different solutions.
(2) Drone flying distance (). In the three solutions studied above, drones are used to transport packages from the land to the island. The drone flying cost is primarily determined by the drones’ flying distances and packages’ weights, while affected by the drones’ original and depreciation costs, or the rental protocols. In the following study, it is presumed that the drone flying cost depends on the flying distances and packages.
(3) Drone landing platform (). DLP is an important and costly facility in a drone-based distribution system. Its cost depends on its size and capacity, installed systems, and even the space occupied by it. Its capacity depends on the delivered packages and the frequencies, and the riders’ schedules.
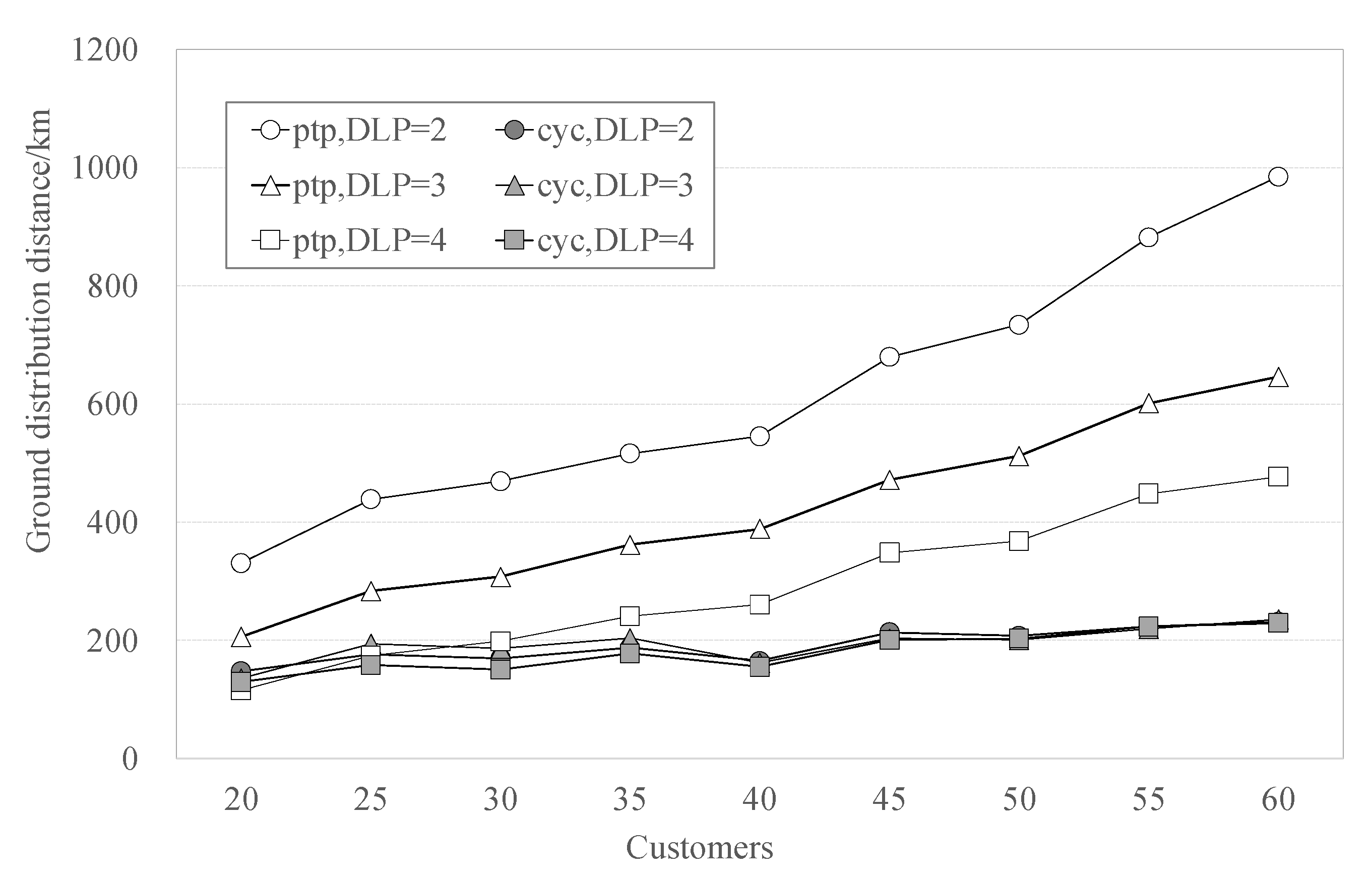
(4) Ground distribution (). In the two “bi-stage distribution” solutions, riders will distribute the packages from the DLPs to the customers. The “cyclic” solution will incur fewer traveling distances than the “point-to-point” solution. The ground distribution cost consists of fixed and variable costs. Generally, the system should pay fixed basic salaries to the riders and fixed costs of distribution facilities and devices, while the traveling time and distances construct variable costs. In the following study, the variable cost of traveling distances is considered.
Table 3 summarizes the comparisons in four metrics among three distribution solutions. Here, the following words are used to express the comparative relations: Low, High, Many, and A few. They indicate the differences among the modes and do not indicate concrete value bounds.
7. Conclusions
We developed the study on a drone-based logistics system for island emergency distribution, considering the specialties of islands. First, the study was conducted after examining the relations studies, technologies, and applications in the area of drone-based logistics. We investigated many experimental systems on drone-based logistics, which were created by the leading companies in package delivery companies. Moreover, drone bases are testing transporting cargo from land to islands. During the COVID-19 epidemic days, some islands face shortages of resources and medicals, which encouraged the study. Second, three drone-based distribution modes are proposed to categorize the various possibilities of using drones in islands: the direct distribution mode, the point-to-point, and the cyclic bi-stage distribution modes. The bi-stage modes use drones for the first-stage land-to-island transportation, and use ground transportation to serve the second-stage distribution, while the DLPs mediate the two stages. We also developed four metrics to evaluate the modes and instructed the modeling, algorithm devices, and comparison studies. Third, solution methods were developed to solve the models, especially for the bi-stage mods. An iterative heuristic was designed to improve the cyclic bi-stage distribution mode. Finally, using the famous “Mount Putuo” island as a case, we developed dataset generation methods and conducted a series of experiments to demonstrate and investigate the proposed modes, models, and solution methods.
This study can be extended in the following aspects in future studies. First, in
Section 4.2, the point-to-point bi-stage distribution mode is formulated as a multi-objective program
. We further formatted a single-objective linear program
based on it, where
sets the DLPs. It is beneficial to develop an algorithm for solving the multi-objective program and investigate the tradeoffs among the three objectives. Second, in
Section 4.3, the cyclic bi-state distribution mode is formulated as separated TSP models for the determined DLPs and assignments of customers to the DLPs. In future studies, we can formulate multi-depot TSPs considering drone traveling distances to the depots. Third, the iterative heuristics developed in
Section 5 is effective, while their optimality cannot be ensured. Furthermore, the terminal criteria of the heuristic algorithm consider the optimization of the two costs, drone traveling and ground distribution distances. Indeed, these two costs can be united, or we can test their tradeoffs. Moreover, new algorithms can be devised to find optimal solutions by using global optimization, other than multi-stage solution methods.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}