
Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points


Abstract
:1. Introduction
- An incrementally updated DFP that can capture essential information from the entire unexplored space and provide global guiding efficiently to evaluate and rectify the direction of the local planner with limited costs in high frequency.
- A fusion replanning strategy, which incorporates two optimization methods with different characteristics to generate a high-quality trajectory efficiently. The method can achieve a balance between planning quality and efficiency by leveraging the advantages of different optimization methods through a reasonable replanning strategy.
- An adaptive optimization method that can adjust the focus of the optimization function by using different weight allocation according to the actual flight environment to improve planning stability.
- Sufficient quantitative comparison experiments are conducted in simulation. Meanwhile, real-world experiments are also carried out to validate our method in various environments.
2. Related Work
2.1. Hard-Constrained Methods
2.2. Soft-Constrained Methods
3. Proposed Approach
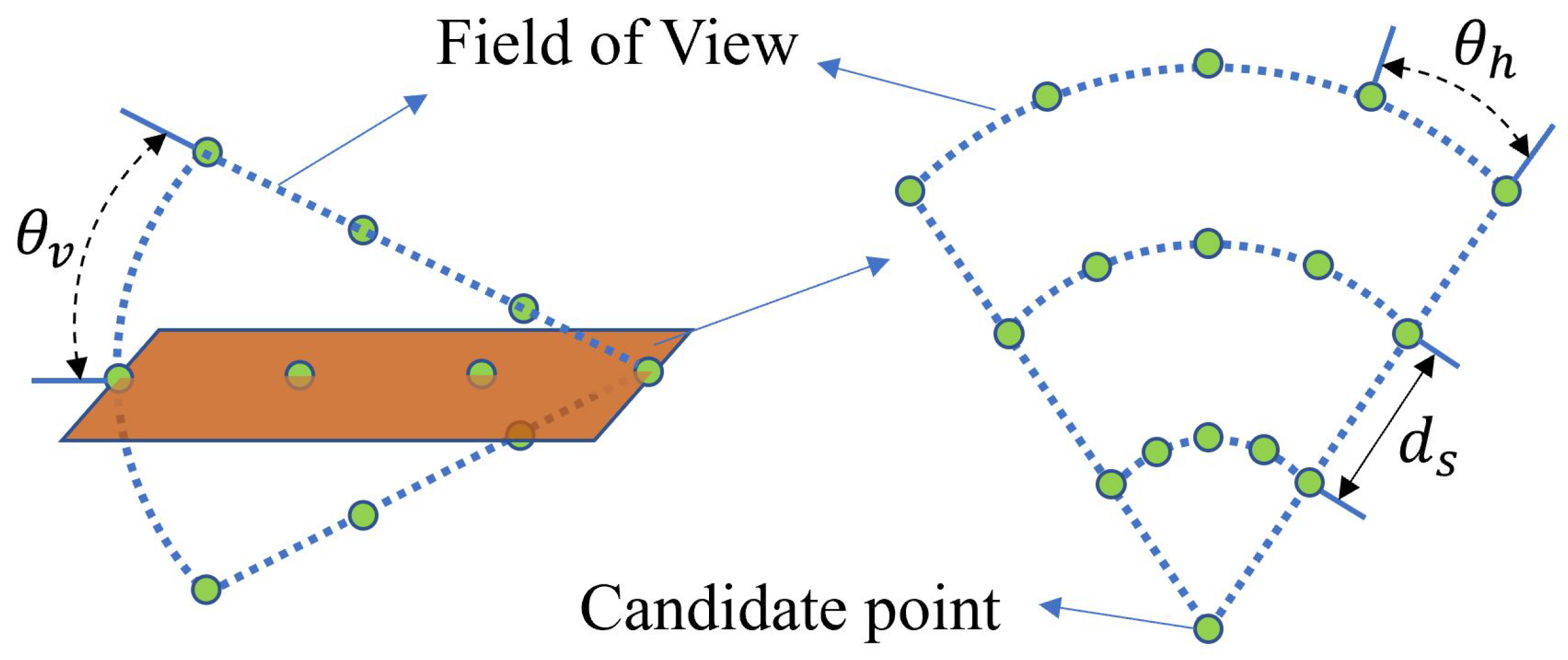
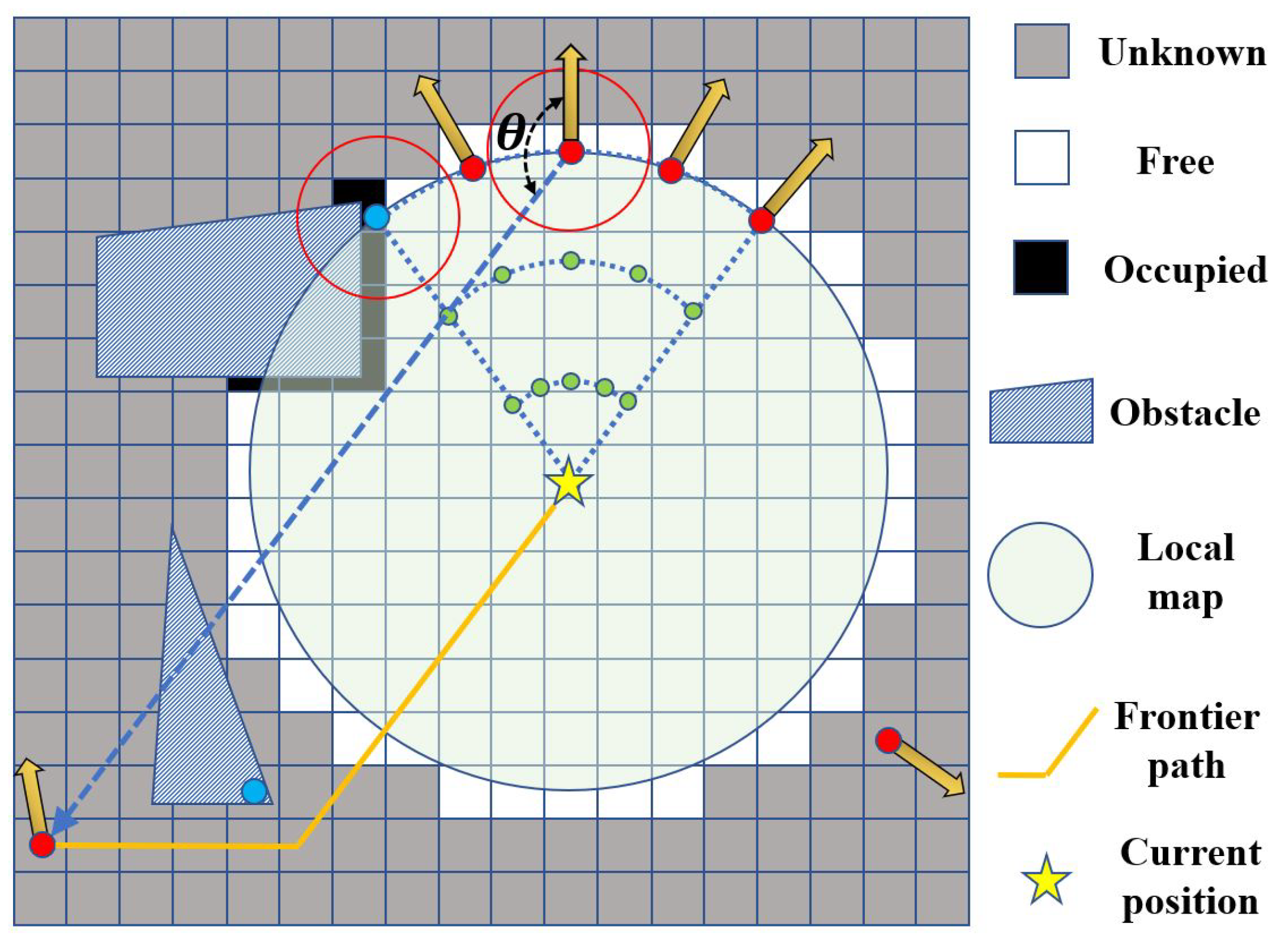
3.1. Directed Frontier Point Information Structure
3.2. Directed Frontier Point Generation and Update
| Algorithm 1 DFP generation and update. |
| Input: |
Output:
|
| Algorithm 2 Frontier path update of DFP. |
| Input: |
Output:
|
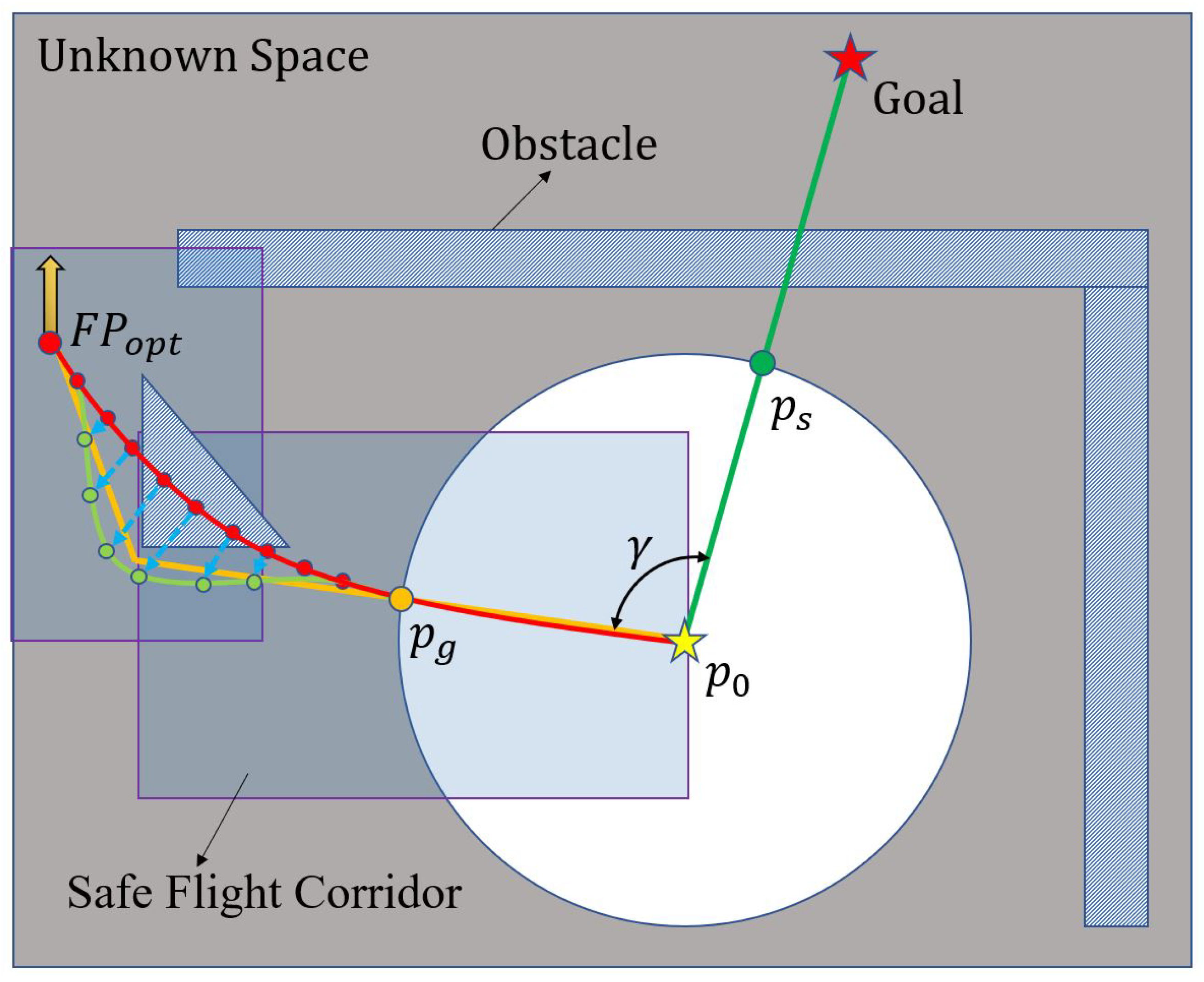
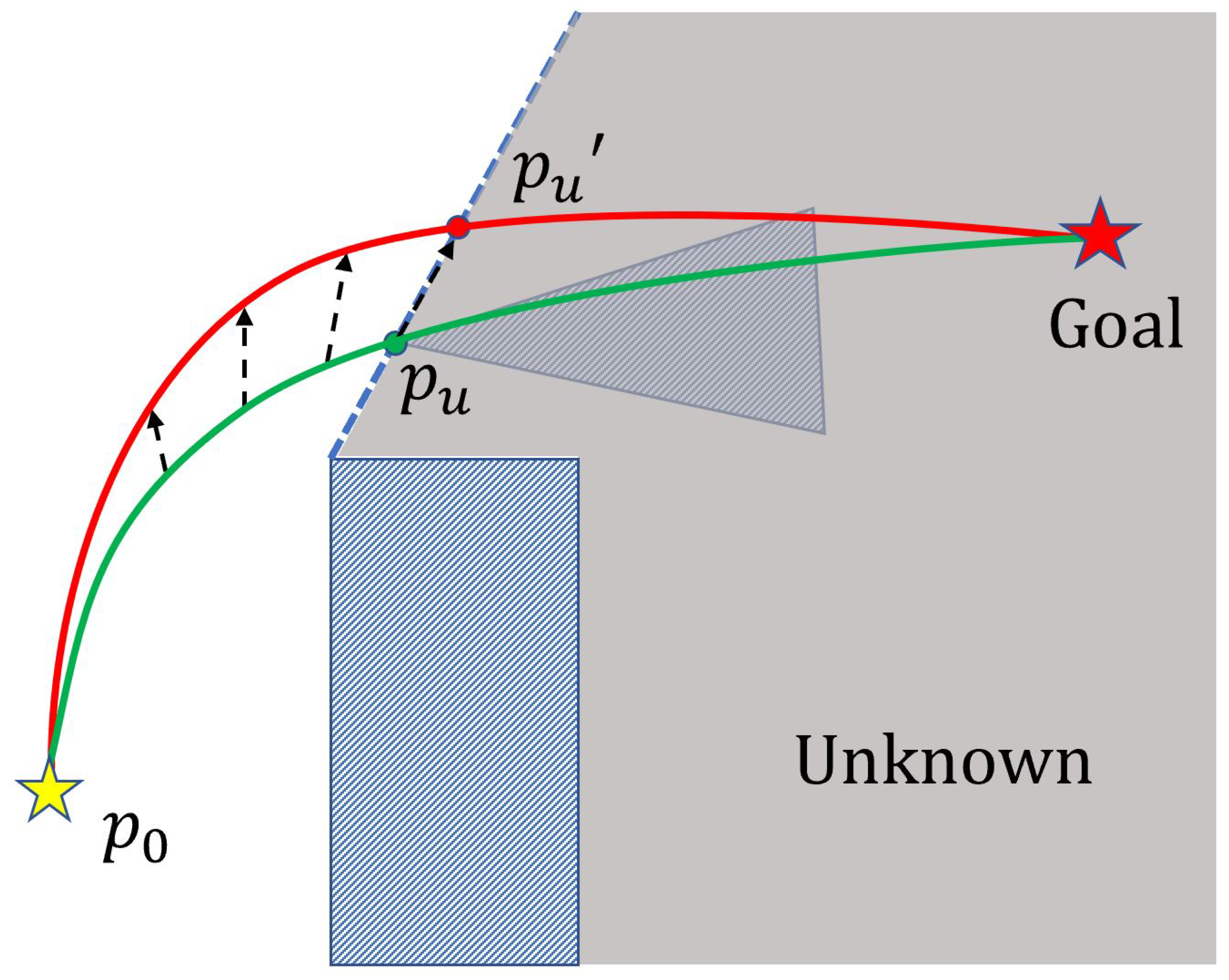
3.3. Local Path Seaching and Rectifying
3.4. Adaptive Fusion Replanning
3.5. Replanning Strategy
4. Experimental Results
4.1. Benchmark Comparisons
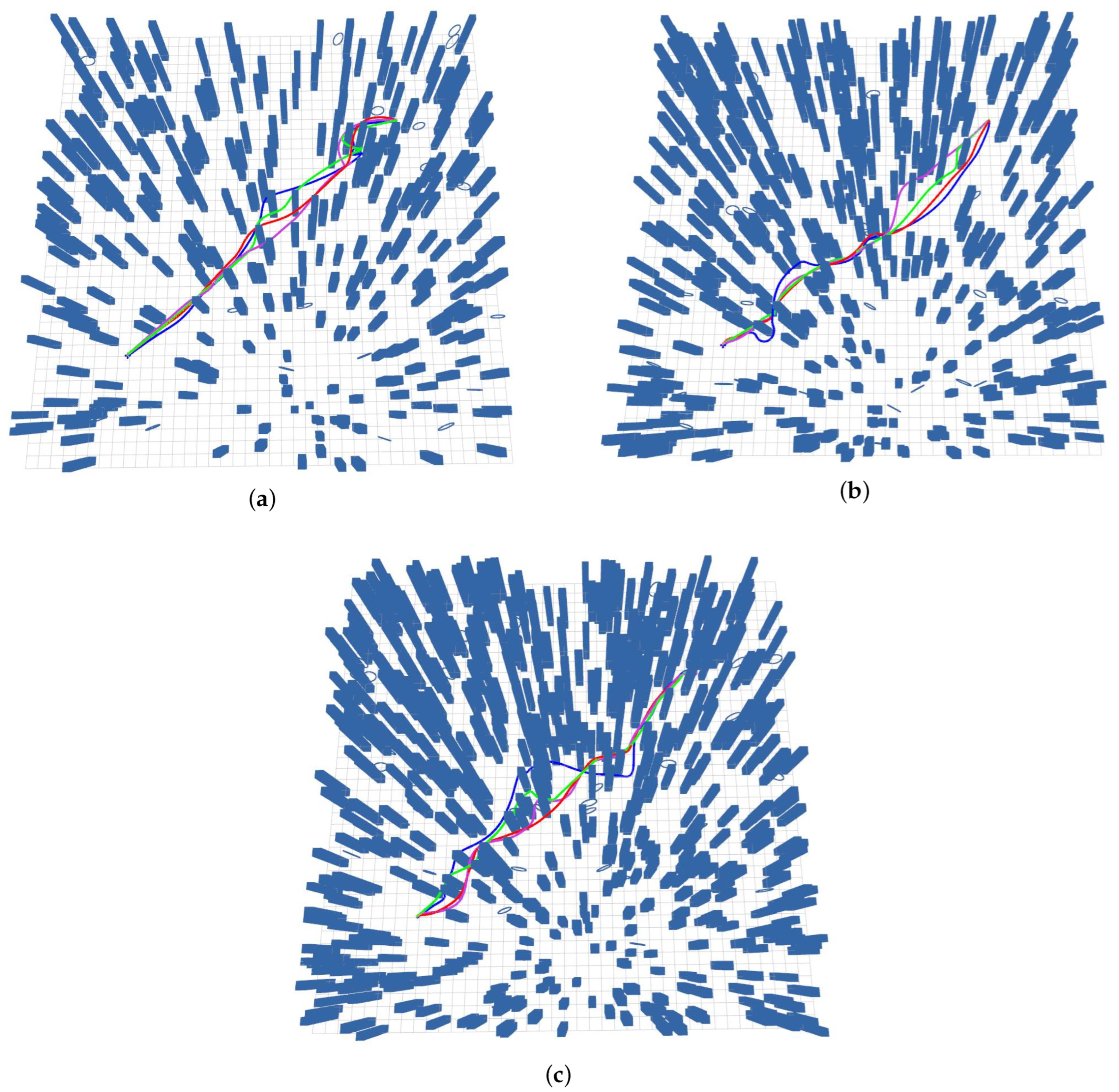
4.1.1. Random Scenario
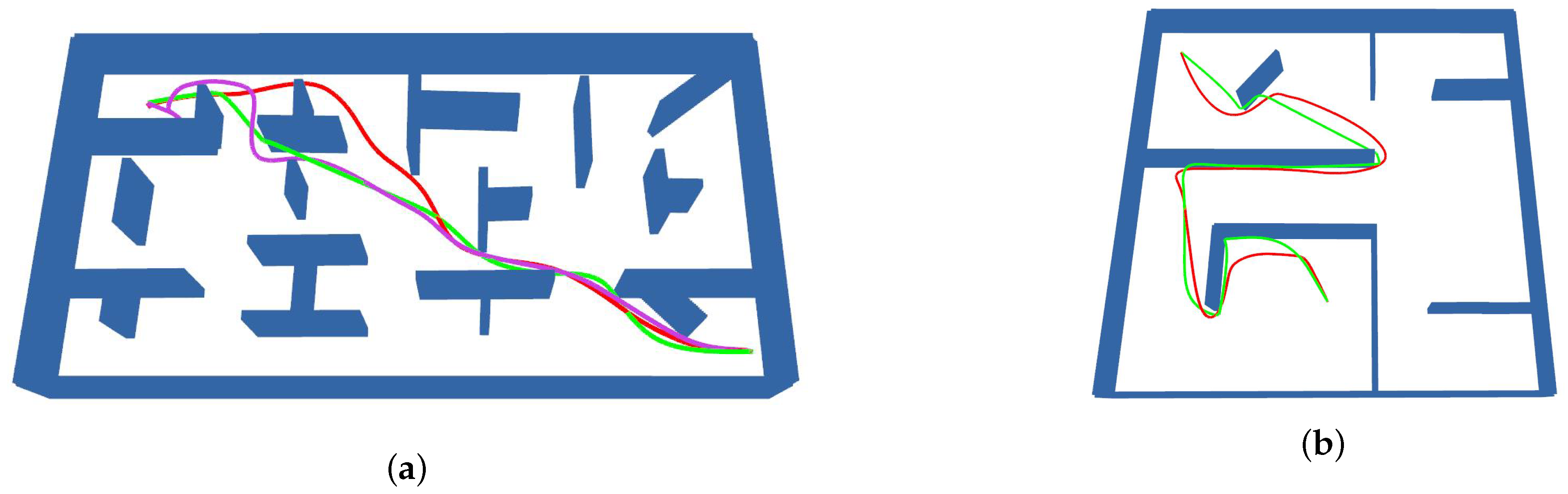
4.1.2. Office Scenario
4.1.3. Further Evaluation
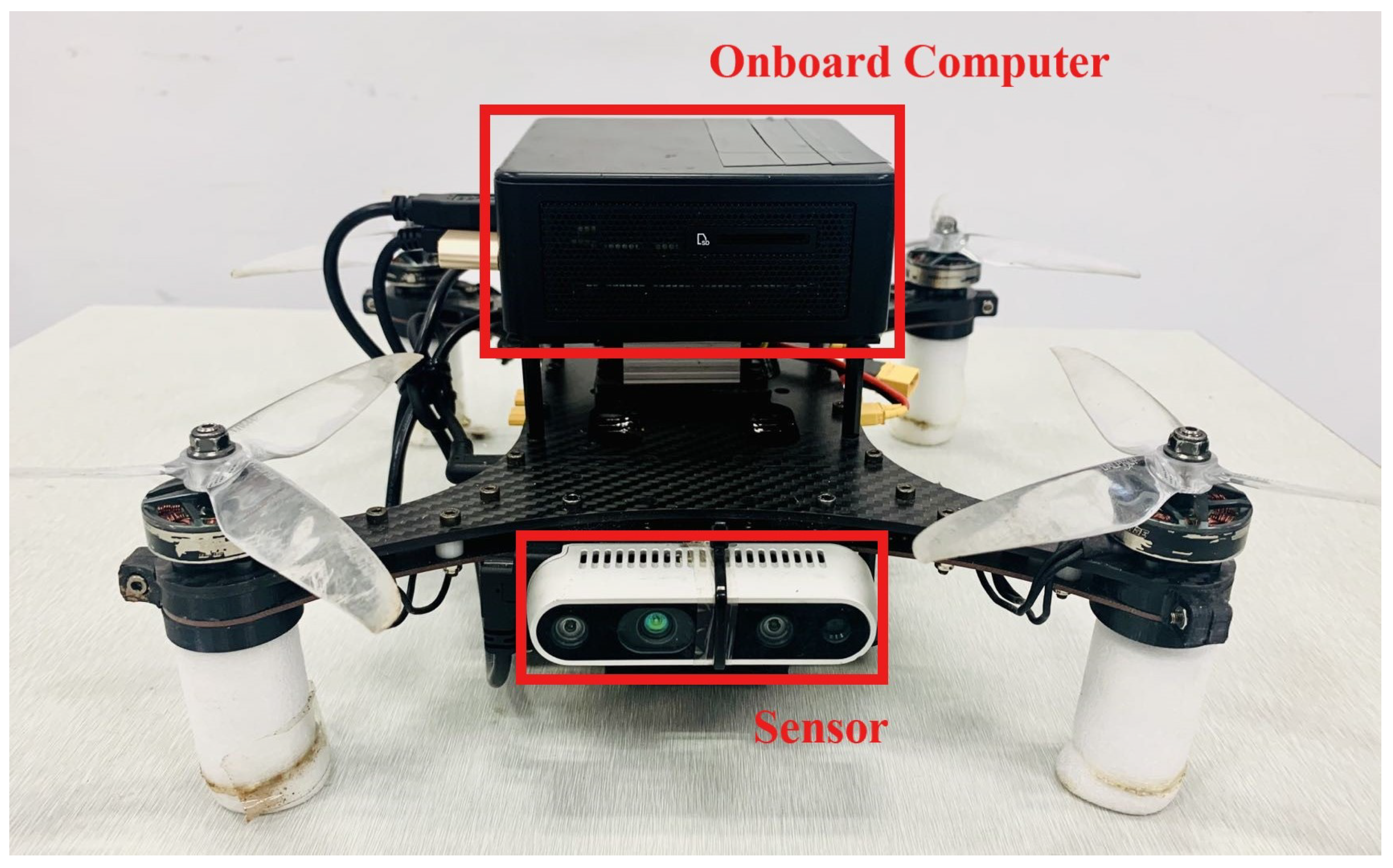
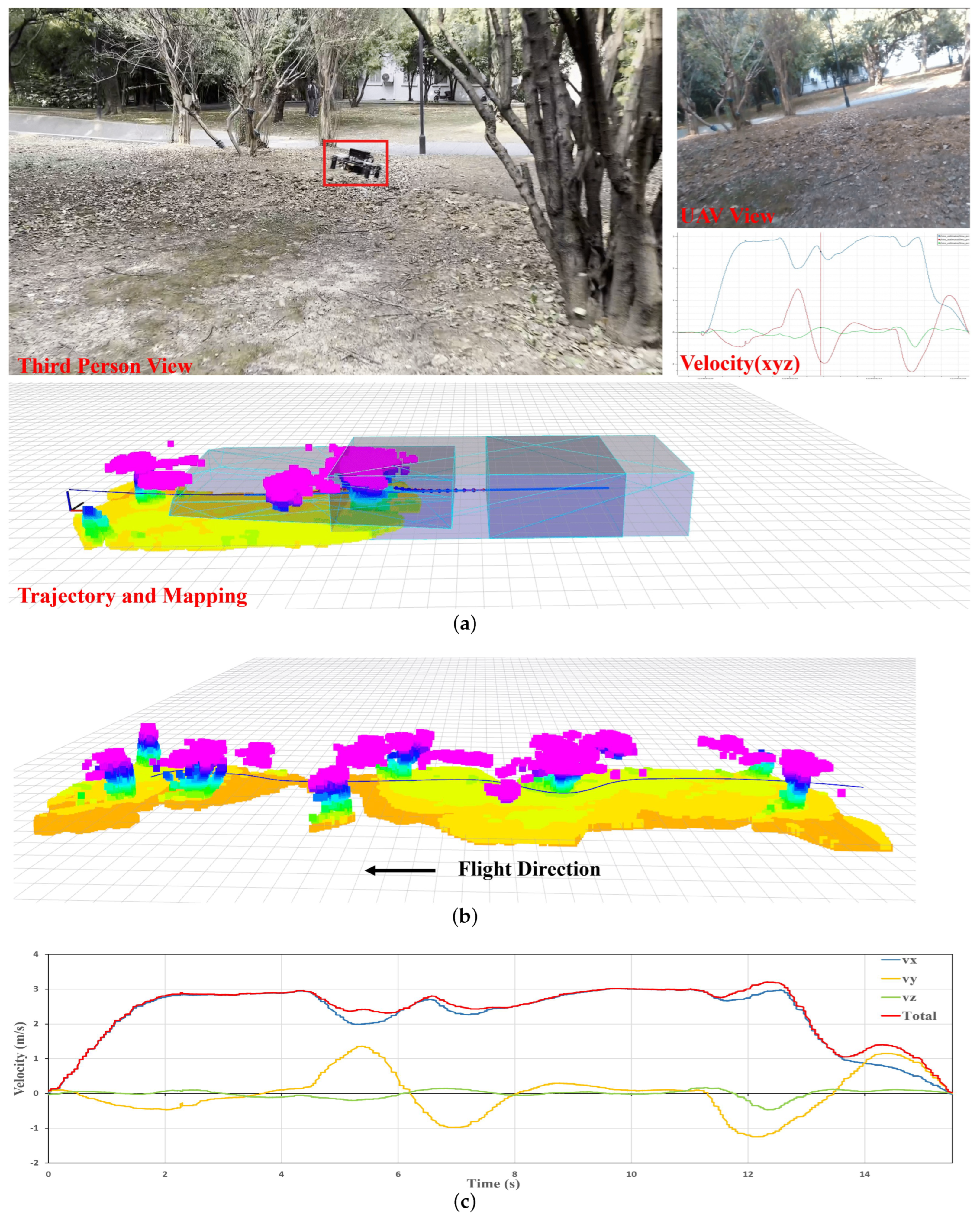
4.2. Real-World Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV Assisted Data Collection for Internet of Things: A Survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Wang, X.; Gursoy, M.C.; Erpek, T.; Sagduyu, Y.E. Learning-Based UAV Path Planning for Data Collection with Integrated Collision Avoidance. IEEE Internet Things J. 2022, 9, 16663–16676. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, F.; Li, Z. A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction. Isprs J. Photogramm. Remote. Sens. 2018, 146, 483–494. [Google Scholar] [CrossRef]
- Zhang, X.; Chu, Y.; Liu, Y.; Zhang, X.; Zhuang, Y. A novel informative autonomous exploration strategy with uniform sampling for quadrotors. IEEE Trans. Ind. Electron. 2021, 69, 13131–13140. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, S.; Zhang, X.; Zhang, X.; Liu, J. Near-optimal 3-D visual coverage for quadrotor unmanned aerial vehicles under photogrammetric constraints. IEEE Trans. Ind. Electron. 2021, 69, 1694–1704. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments. IEEE Internet Things J. 2020, 8, 4906–4919. [Google Scholar]
- Chen, S.W.; Nardari, G.V.; Lee, E.S.; Qu, C.; Liu, X.; Romero, R.A.F.; Kumar, V. Sloam: Semantic lidar odometry and mapping for forest inventory. IEEE Robot. Autom. Lett. 2020, 5, 612–619. [Google Scholar] [CrossRef] [Green Version]
- Qadir, Z.; Zafar, M.H.; Moosavi, S.K.R.; Le, K.N.; Mahmud, M.P. Autonomous UAV Path-Planning Optimization Using Metaheuristic Approach for Predisaster Assessment. IEEE Internet Things J. 2021, 9, 12505–12514. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, C.; Pan, M. Multiobjective UAV path planning for emergency information collection and transmission. IEEE Internet Things J. 2020, 7, 6993–7009. [Google Scholar] [CrossRef]
- Yin, C.; Xiao, Z.; Cao, X.; Xi, X.; Yang, P.; Wu, D. Offline and online search: UAV multiobjective path planning under dynamic urban environment. IEEE Internet Things J. 2017, 5, 546–558. [Google Scholar] [CrossRef]
- Li, J.; Xiong, Y.; She, J.; Wu, M. A path planning method for sweep coverage with multiple UAVs. IEEE Internet Things J. 2020, 7, 8967–8978. [Google Scholar] [CrossRef]
- Liu, D.; Bao, W.; Zhu, X.; Fei, B.; Men, T.; Xiao, Z. Cooperative Path Optimization for Multiple UAVs Surveillance in Uncertain Environment. IEEE Internet Things J. 2021, 9, 10676–10692. [Google Scholar] [CrossRef]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A Novel Hybrid Particle Swarm Optimization Algorithm for Path Planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Shen, K.; Shivgan, R.; Medina, J.; Dong, Z.; Rojas-Cessa, R. Multi-Depot Drone Path Planning with Collision Avoidance. IEEE Internet Things J. 2022, 9, 16297–16307. [Google Scholar] [CrossRef]
- Khamidehi, B.; Sousa, E.S. Reinforcement Learning-aided Safe Planning for Aerial Robots to Collect Data in Dynamic Environments. IEEE Internet Things J. 2022, 9, 13901–13912. [Google Scholar] [CrossRef]
- Tordesillas, J.; Lopez, B.T.; How, J.P. Faster: Fast and safe trajectory planner for flights in unknown environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: New York, NY, USA, 2019; pp. 1934–1940. [Google Scholar]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Wang, Z.; Ye, H.; Xu, C.; Gao, F. Ego-planner: An esdf-free gradient-based local planner for quadrotors. IEEE Robot. Autom. Lett. 2020, 6, 478–485. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 25–30 September 2011; IEEE: New York, NY, USA, 2011; pp. 2520–2525. [Google Scholar]
- Richter, C.; Bry, A.; Roy, N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2016; pp. 649–666. [Google Scholar]
- Gao, F.; Wu, W.; Lin, Y.; Shen, S. Online safe trajectory generation for quadrotors using fast marching method and bernstein basis polynomial. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; IEEE: New York, NY, USA, 2018; pp. 344–351. [Google Scholar]
- Gao, F.; Shen, S. Online quadrotor trajectory generation and autonomous navigation on point clouds. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; IEEE: New York, NY, USA, 2016; pp. 139–146. [Google Scholar]
- Ding, W.; Gao, W.; Wang, K.; Shen, S. An efficient b-spline-based kinodynamic replanning framework for quadrotors. IEEE Trans. Robot. 2019, 35, 1287–1306. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Wang, L.; Zhou, B.; Zhou, X.; Pan, J.; Shen, S. Teach-repeat-replan: A complete and robust system for aggressive flight in complex environments. IEEE Trans. Robot. 2020, 36, 1526–1545. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, R.; Pan, N.; Xu, C.; Gao, F. Fast-tracker: A robust aerial system for tracking agile target in cluttered environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: New York, NY, USA, 2021; pp. 328–334. [Google Scholar]
- Wang, Z.; Zhou, X.; Xu, C.; Gao, F. Geometrically constrained trajectory optimization for multicopters. IEEE Trans. Robot. 2022, 38, 3259–3278. [Google Scholar] [CrossRef]
- Ratliff, N.; Zucker, M.; Bagnell, J.A.; Srinivasa, S. CHOMP: Gradient optimization techniques for efficient motion planning. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; IEEE: New York, NY, USA, 2009; pp. 489–494. [Google Scholar]
- Kalakrishnan, M.; Chitta, S.; Theodorou, E.; Pastor, P.; Schaal, S. STOMP: Stochastic trajectory optimization for motion planning. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: New York, NY, USA, 2011; pp. 4569–4574. [Google Scholar]
- Oleynikova, H.; Burri, M.; Taylor, Z.; Nieto, J.; Siegwart, R.; Galceran, E. Continuous-time trajectory optimization for online uav replanning. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: New York, NY, USA, 2016; pp. 5332–5339. [Google Scholar]
- Gao, F.; Lin, Y.; Shen, S. Gradient-based online safe trajectory generation for quadrotor flight in complex environments. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: New York, NY, USA, 2017; pp. 3681–3688. [Google Scholar]
- Usenko, V.; Von Stumberg, L.; Pangercic, A.; Cremers, D. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: New York, NY, USA, 2017; pp. 215–222. [Google Scholar]
- Zhou, B.; Pan, J.; Gao, F.; Shen, S. Raptor: Robust and perception-aware trajectory replanning for quadrotor fast flight. IEEE Trans. Robot. 2021, 37, 1992–2009. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, L.; Chen, Y.; Dai, J.; Liu, Y. Robust and efficient trajectory replanning based on guiding path for quadrotor fast autonomous flight. Remote Sens. 2021, 13, 972. [Google Scholar] [CrossRef]
- Ye, H.; Zhou, X.; Wang, Z.; Xu, C.; Chu, J.; Gao, F. Tgk-planner: An efficient topology guided kinodynamic planner for autonomous quadrotors. IEEE Robot. Autom. Lett. 2020, 6, 494–501. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Explanation |
|---|---|
| Position of frontier point | |
| Orientation of unexplored space | |
| Collision-free path between the frontier point and the UAV |
| Scene | Method | Flight Time (s) | Flight Distance (m) | Energy () | Replan Time (ms) | Success Rate (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Std | Max | Avg | Std | Max | Avg | Std | Max | ||||
| 0.2 obs/m | Fast-Planner | 15.95 | 1.5 | 18.47 | 35.67 | 1.06 | 37.44 | 255.02 | 87.2 | 400.91 | 3.2 | 86 |
| FASTER | 15.38 | 2.5 | 21.66 | 33.85 | 2.4 | 39.23 | 125.47 | 32.2 | 174.98 | 29.9 | 93.3 | |
| EGO-Planner | 15.14 | 1.7 | 19.67 | 33.35 | 1.0 | 35.15 | 215.02 | 44.7 | 286.98 | 1.9 | 100 | |
| Proposed | 15.69 | 0.3 | 16.34 | 33.48 | 0.6 | 34.32 | 168.22 | 62.2 | 261.10 | 3.3 | 100 | |
| 0.3 obs/m | Fast-Planner | 18.27 | 2.1 | 20.66 | 36.65 | 1.5 | 38.70 | 339.36 | 101.9 | 510.59 | 3.2 | 80 |
| FASTER | 17.66 | 2.2 | 21.36 | 33.73 | 1.0 | 35.91 | 196.02 | 58.2 | 339.10 | 34.9 | 86 | |
| EGO-Planner | 17.20 | 2.4 | 21.93 | 35.37 | 1.7 | 37.79 | 431.66 | 112.7 | 675.38 | 2.5 | 93 | |
| Proposed | 17.45 | 2.1 | 23.31 | 34.66 | 1.4 | 37.20 | 267.08 | 75.3 | 472.30 | 3.9 | 100 | |
| 0.4 obs/m | Fast-Planner | 24.76 | 4.4 | 31.61 | 37.63 | 2.2 | 40.84 | 675.38 | 168.85 | 952.41 | 3.4 | 33.3 |
| FASTER | 23.78 | 2.7 | 27.71 | 36.07 | 2.3 | 41.71 | 329.47 | 71.0 | 464.19 | 41.0 | 53.3 | |
| EGO-Planner | 17.80 | 1.8 | 22.52 | 35.87 | 1.1 | 38.83 | 464.22 | 126.8 | 762.39 | 2.4 | 66.7 | |
| Proposed | 18.64 | 1.8 | 21.60 | 35.75 | 1.2 | 38.17 | 304.06 | 66.5 | 462.58 | 4.8 | 100 | |
| Scene | Method | Flight Time (s) | Flight Distance (m) | Energy () | Replan Time (ms) | Success Rate (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg | Std | Max | Avg | Std | Max | Avg | Std | Max | ||||
| Office-1 | Fast-Planner | / | / | / | / | / | / | / | / | / | / | 0 |
| FASTER | 17.39 | 2.9 | 25.64 | 32.43 | 4.8 | 46.39 | 178.89 | 40.8 | 255.24 | 39.7 | 100 | |
| EGO-Planner | 19.55 | 1.8 | 22.44 | 33.32 | 1.0 | 34.33 | 303.03 | 35.3 | 331.54 | 3.3 | 80.0 | |
| Proposed | 17.72 | 2.4 | 22.93 | 33.06 | 2.9 | 38.10 | 176.65 | 49.0 | 296.79 | 4.8 | 100 | |
| Office-2 | Fast-Planner | / | / | / | / | / | / | / | / | / | / | 0 |
| FASTER | 33.71 | / | 33.71 | 65.91 | / | 65.91 | 170.73 | / | 170.73 | 38.4 | 10.0 | |
| EGO-Planner | / | / | / | / | / | / | / | / | / | / | 0 | |
| Proposed | 32.93 | 1.7 | 35.41 | 67.51 | 2.0 | 71.29 | 198.90 | 43.0 | 272.37 | 9.8 | 100 | |
| Scene | DFPs Update Time (ms) | DFPs Num. | OPs Num. | |||
|---|---|---|---|---|---|---|
| Avg | Std | Max | Min | |||
| 0.2 obs./m | 0.34 | 0.07 | 0.52 | 0.29 | 116.0 | 67.3 |
| 0.3 obs./m | 0.28 | 0.02 | 0.34 | 0.25 | 81.4 | 95.8 |
| 0.4 obs./m | 0.26 | 0.02 | 0.29 | 0.23 | 78.7 | 108.4 |
| Office-1 | 0.17 | 0.03 | 0.28 | 0.17 | 45.1 | 73.0 |
| Office-2 | 0.26 | 0.09 | 0.36 | 0.25 | 98.4 | 59.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Yan, L.; Dai, J.; Hu, X.; Wei, P.; Xie, H. Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points. Drones 2023, 7, 219. https://doi.org/10.3390/drones7030219
Zhao Y, Yan L, Dai J, Hu X, Wei P, Xie H. Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points. Drones. 2023; 7(3):219. https://doi.org/10.3390/drones7030219
Chicago/Turabian StyleZhao, Yinghao, Li Yan, Jicheng Dai, Xiao Hu, Pengcheng Wei, and Hong Xie. 2023. "Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points" Drones 7, no. 3: 219. https://doi.org/10.3390/drones7030219
APA StyleZhao, Y., Yan, L., Dai, J., Hu, X., Wei, P., & Xie, H. (2023). Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points. Drones, 7(3), 219. https://doi.org/10.3390/drones7030219