



A Review of Swarm Robotics in a NutShell

 , , ,
, , , 
Abstract
:1. Introduction
- To understand the fundamental difference between multi-agent and swarm of robots, along with the natural behaviours of a swarm.
- Multiple swarm intelligence algorithms derived from the natural set of rules and constraints for their transformation on multi-agent robots.
- Industrial and academic utilization of swarm robotics keeping in view the history and future perspectives.
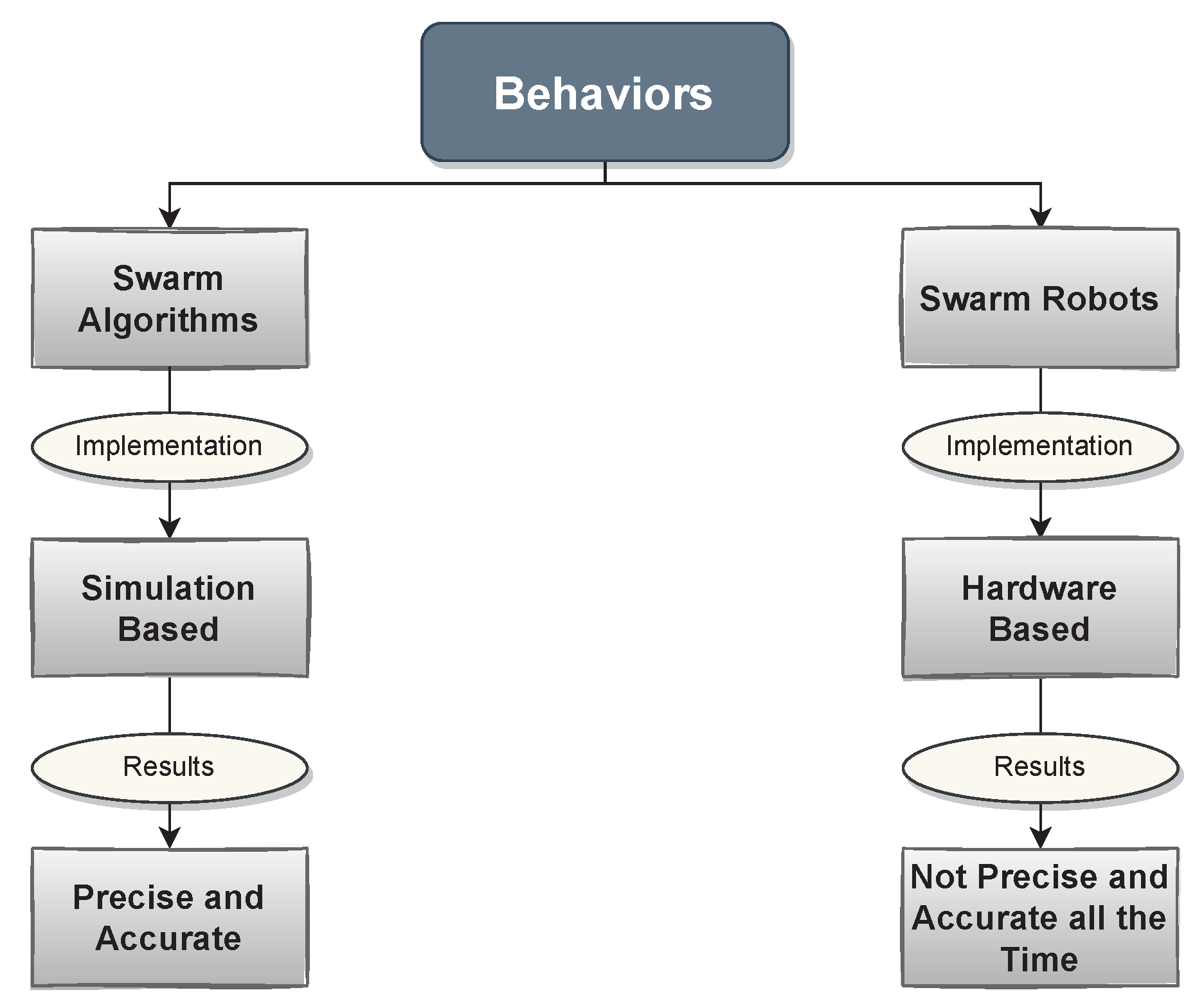
- The objective is to address the research gap that exists between theoretical and industrial research in the field of swarm robotics. Theoretical research mainly involves simulating swarm behaviours using algorithms, while research in industrial settings are primarily focused on designing and developing hardware capable of executing swarm behaviour. Therefore, it is imperative to deploy swarm algorithms using specific hardware that can accommodate swarm behaviour functionality.

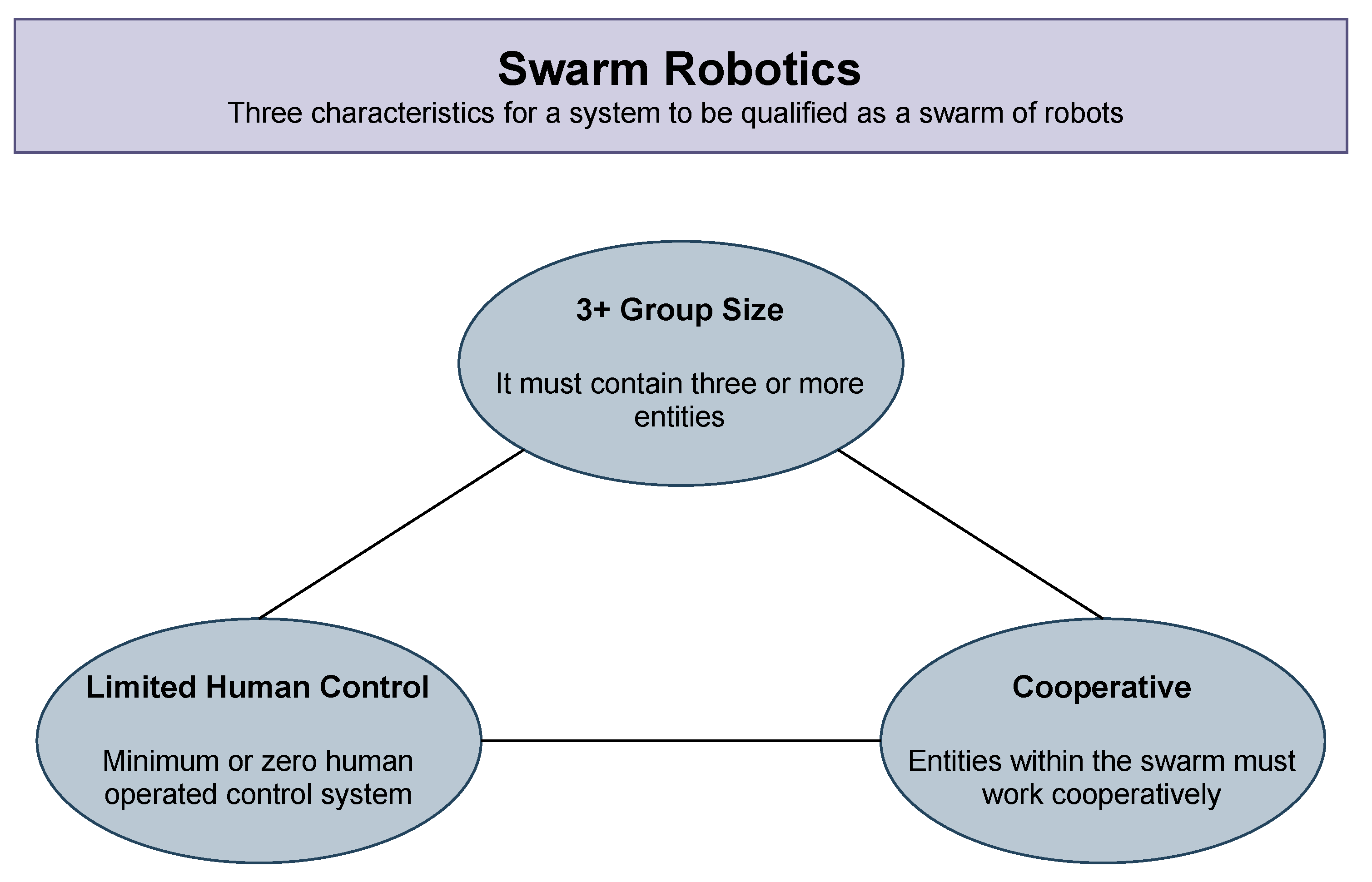
2. Swarm Robotics Fundamental Behaviours
2.1. Spatial Organization
2.2. Navigation
2.3. Decision Making
2.4. Miscellaneous
3. Swarm Intelligence Algorithms
3.1. Genetic Algorithm

3.2. Ant Colony Optimization
3.3. Particle Swarm Optimization
3.4. Differential Evolution
3.5. Artificial Bee Colony
3.6. Glowworm Swarm Optimization
3.7. Cuckoo Search Algorithm
4. Applications of Swarm Robotics
4.1. Research Platforms
4.1.1. Terrestrial
4.1.2. Aerial
4.1.3. Aquatic
4.1.4. Outer Space
4.2. Industrial Projects and Products
4.2.1. Terrestrial
4.2.2. Aerial
4.2.3. Aquatic
4.2.4. Outer Space
5. Swarm Robotics: Past, Present and Future Perspective
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm robotic behaviors and current applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arnold, R.; Carey, K.; Abruzzo, B.; Korpela, C. What is a robot swarm: A definition for swarming robotics. In Proceedings of the 2019 IEEE 10th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 10–12 October 2019; pp. 74–81. [Google Scholar]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 2020, 5, eabe4385. [Google Scholar] [CrossRef] [PubMed]
- Floreano, D.; Mattiussi, C. Bio-Inspired Artificial Intelligence; MIT Press: Cambridge, MA, USA, 2008; Volume 5, pp. 335–396. [Google Scholar]
- Maxim, P.M.; Spears, W.M.; Spears, D.F. Robotic chain formations. IFAC Proc. Vol. 2009, 42, 19–24. [Google Scholar] [CrossRef] [Green Version]
- Rubenstein, M.; Cornejo, A.; Nagpal, R. Programmable self-assembly in a thousand-robot swarm. Science 2014, 345, 795–799. [Google Scholar] [CrossRef] [PubMed]
- Slavkov, I.; Carrillo-Zapata, D.; Carranza, N.; Diego, X.; Jansson, F.; Kaorp, J.; Hauert, S.; Sharpe, J. Morphogenesis in robot swarms. Sci. Robot. 2018, 3, eaau9178. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, D.; Sharpe, J.; Winfield, A.F.; Giuggioli, L.; Hauert, S. Toward controllable morphogenesis in large robot swarms. IEEE Robot. Autom. Lett. 2019, 4, 3386–3393. [Google Scholar] [CrossRef] [Green Version]
- Bayındır, L. A review of swarm robotics tasks. Neurocomputing 2016, 172, 292–321. [Google Scholar] [CrossRef]
- Sion, A.; Reina, A.; Birattari, M.; Tuci, E. Controlling robot swarm aggregation through a minority of informed robots. In Proceedings of the Swarm Intelligence: 13th International Conference, ANTS 2022, Málaga, Spain, 2–4 November 2022; Springer: Cham, Switzerland, 2022; pp. 91–103. [Google Scholar]
- Ducatelle, F.; Di Caro, G.A.; Förster, A.; Bonani, M.; Dorigo, M.; Magnenat, S.; Mondada, F.; O’Grady, R.; Pinciroli, C.; Rétornaz, P.; et al. Cooperative navigation in robotic swarms. Swarm Intell. 2013, 8, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Varga, M.; Bogdan, S.; Dragojević, M.; Miklić, D. Collective search and decision-making for target localization. Math. Comput. Model. Dyn. Syst. 2012, 18, 51–65. [Google Scholar] [CrossRef]
- Firat, Z.; Ferrante, E.; Zakir, R.; Prasetyo, J.; Tuci, E. Group-size regulation in self-organized aggregation in robot swarms. In Swarm Intelligence, Proceedings of the 12th International Conference, ANTS 2020, Barcelona, Spain, 26–28 October 2020; Springer: Cham, Switzerland, 2020; pp. 315–323. [Google Scholar]
- Christensen, A.L.; O’Grady, R.; Birattari, M.; Dorigo, M. Exogenous fault detection in a collective robotic task. In Proceedings of the Advances in Artificial Life: 9th European Conference, ECAL 2007, Lisbon, Portugal, 10–14 September 2007; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Alitappeh, R.J.; Jeddisaravi, K. Multi-robot exploration in task allocation problem. Appl. Intell. 2022, 52, 2189–2211. [Google Scholar] [CrossRef]
- Moussa, M.; Beltrame, G. On the robustness of consensus-based behaviors for robot swarms. Swarm Intell. 2020, 14, 205–231. [Google Scholar] [CrossRef]
- Tang, W.; Zhang, C.; Zhong, Y.; Zhu, P.; Hu, Y.; Jiao, Z.; Wei, X.; Lu, G.; Wang, J.; Liang, Y.; et al. Customizing a self-healing soft pump for robot. Nat. Commun. 2021, 12, 2247. [Google Scholar] [CrossRef] [PubMed]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Goldberg, D.E. Genetic Learning in Optimization, Search and Machine Learning; Addisson Wesley: Boston, CA, USA, 1994. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Grefenstette, J.J. Navy Center for Applied Research in Artificial Intelligence Naval Research Laboratory, Washington, DC 20375-5000. Mach. Learn. Proc. 1989 2014, 28, 340. [Google Scholar]
- Bhattacharjya, D.R. Introduction to Genetic Algorithms; IIT Guwahati: Guwahati, India, 1998. [Google Scholar]
- Devooght, R. Multi-Objective Genetic Algorithm. 2010, 1–39. Available online: epb-physique.ulb.ac.be/IMG/pdf/devooght_2011.pdf (accessed on 1 January 2014).
- Uzel, O.; Koc, E. Basic of Genetic Programming, Graduation Project I. 2012, 1–25. Available online: http://mcs.cankaya.edu.tr/proje/2012/guz/omer_erdem/Rapor.pdf (accessed on 3 January 2014).
- de Oliveira, G.M.; Silva, R.G.; do Amaral, L.R.; Martins, L.G. An evolutionary-cooperative model based on cellular automata and genetic algorithms for the navigation of robots under formation control. In Proceedings of the 2018 7th Brazilian Conference on Intelligent Systems (BRACIS), Sao Paulo, Brazil, 22–25 October 2018; pp. 426–431. [Google Scholar]
- Shao, J. Robot Path Planning Method Based on Genetic Algorithm. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1881, p. 022046. [Google Scholar]
- Godinho, F.M.; Barco, C.F.; Tavares Neto, R.F. Using Genetic Algorithms to solve scheduling problems on flexible manufacturing systems (FMS): A literature survey, classification and analysis. Flex. Serv. Manuf. J. 2014, 26, 408–431. [Google Scholar] [CrossRef]
- Cheng, C.; Yang, Z.; Xing, L.; Tan, Y. An improved genetic algorithm with local search for order acceptance and scheduling problems. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence in Production and Logistics Systems (CIPLS), Singapore, 16–19 April 2013; pp. 115–122. [Google Scholar]
- Sachdeva, J.; Kumar, V.; Gupta, I.; Khelwal, N.; Ahuja, C.K. Multiclass brain tumor classification using GA-SVM. In Proceedings of the 2011 Developments in E-systems Engineering, Dubai, United Arab Emirates, 6–8 December 2011; pp. 182–187. [Google Scholar]
- Khuntia, A.K.; Choudhury, B.B.; Biswal, B.B.; Dash, K.K. A heuristics based multi-robot task allocation. In Proceedings of the 2011 IEEE Recent Advances in Intelligent Computational Systems, Trivandrum, India, 22–24 September 2011; pp. 407–410. [Google Scholar]
- Yang, Q.; Yu, M.; Liu, S.; Chai, Z.M. Path planning of robotic fish based on genetic algorithm and modified dynamic programming. In Proceedings of the 2011 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, 11–13 August 2011; pp. 419–424. [Google Scholar]
- Kang, C.C.; Chuang, Y.J.; Tung, K.C.; Chao, C.C.; Tang, C.Y.; Peng, S.C.; Wong, D.S. A genetic algorithm-based boolean delay model of intracellular signal transduction in inflammation. BMC Bioinform. 2011, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Foschini, L.; Tortonesi, M. Adaptive and business-driven service placement in federated Cloud computing environments. In Proceedings of the 2013 IFIP/IEEE International Symposium on Integrated Network Management (IM 2013), Ghent, Belgium, 27–31 May 2013; pp. 1245–1251. [Google Scholar]
- Fu, H.H.; Li, Z.J.; Li, G.W.; Jin, X.T.; Zhu, P.H. Modeling and controlling of engineering ship based on genetic algorithm. In Proceedings of the 2012 International Conference on Modelling, Identification and Control, Wuhan, China, 24–26 June 2012; pp. 394–398. [Google Scholar]
- Mahmudy, W.F.; Marian, R.M.; Luong, L.H. Optimization of part type selection and loading problem with alternative production plans in flexible manufacturing system using hybrid genetic algorithms-part 1: Modelling and representation. In Proceedings of the 2013 5th International Conference on Knowledge and Smart Technology (KST), Chonburi, Thailand, 31 January 2013–1 February 2013; pp. 75–80. [Google Scholar]
- Jing, X.; Liu, Y.; Cao, W. A hybrid genetic algorithm for route optimization in multimodal transport. In Proceedings of the 2012 Fifth International Symposium on Computational Intelligence and Design, Hangzhou, China, 28–29 October 2012; pp. 261–264. [Google Scholar]
- Murata, T.; Ishibuchi, H. MOGA: Multi-objective genetic algorithms. In Proceedings of the IEEE International Conference on Evolutionary Computation, Piscataway, NJ, USA, 29 November 1995; pp. 289–294. [Google Scholar]
- Dorigo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 1992. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Abreu, N.; Ajmal, M.; Kokkinogenis, Z.; Bozorg, B. Ant Colony Optimization; University of Porto: Porto, Portugal, 2011. [Google Scholar]
- Selvi, V.; Umarani, R. Comparative analysis of ant colony and particle swarm optimization techniques. Int. J. Comput. Appl. 2010, 5, 1–6. [Google Scholar] [CrossRef]
- Valdez, F.; Chaparro, I. Ant colony optimization for solving the TSP symetric with parallel processing. In Proceedings of the 2013 Joint IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), Edmonton, AB, Canada, 24–28 June 2013; pp. 1192–1196. [Google Scholar]
- Tosun, U.; Dokeroglu, T.; Cosar, A. A robust island parallel genetic algorithm for the quadratic assignment problem. Int. J. Prod. Res. 2013, 51, 4117–4133. [Google Scholar] [CrossRef]
- Yagmahan, B.; Yenisey, M.M. A multi-objective ant colony system algorithm for flow shop scheduling problem. Expert Syst. Appl. 2010, 37, 1361–1368. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Elkhodary, S.M.; Osama, R.A. Distribution networks reconfiguration for loss reduction using the Hyper Cube Ant Colony Optimization. In Proceedings of the 2011 International Conference on Computer Engineering & Systems, Cairo, Egypt, 29 November–1 December 2011; pp. 79–84. [Google Scholar]
- Kumar, S.B.; Myilsamy, G. Multi-target tracking in mobility sensor networks using Ant Colony Optimization. In Proceedings of the 2013 IEEE International Conference On Emerging Trends in Computing, Communication and Nanotechnology (ICECCN), Tirunelveli, India, 25–26 March 2013; pp. 350–354. [Google Scholar]
- Agrawal, P.; Kaur, S.; Kaur, H.; Dhiman, A. Analysis and synthesis of an ant colony optimization technique for image edge detection. In Proceedings of the 2012 International Conference on Computing Sciences, Phagwara, India, 14–15 September 2012; pp. 127–131. [Google Scholar]
- He, Y.; Zeng, Q.; Liu, J.; Xu, G.; Deng, X. Path planning for indoor UAV based on Ant Colony Optimization. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 2919–2923. [Google Scholar]
- Abdallah, H.; Emara, H.M.; Dorrah, H.T.; Bahgat, A. Using ant colony optimization algorithm for solving project management problems. Expert Syst. Appl. 2009, 36, 10004–10015. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization: An overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Del Valle, Y.; Venayagamoorthy, G.K.; Mohagheghi, S.; Hernandez, J.C.; Harley, R.G. Particle swarm optimization: Basic concepts, variants and applications in power systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Yan, X.; Wu, Q.; Liu, H.; Huang, W. An improved particle swarm optimization algorithm and its application. Int. J. Comput. Sci. Issues 2013, 10, 316. [Google Scholar]
- Arumugam, M.S.; Rao, M.V.; Tan, A.W. A novel and effective particle swarm optimization like algorithm with extrapolation technique. Appl. Soft Comput. 2009, 9, 308–320. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Ince, T.; Yildirim, A.; Gabbouj, M. Fractional particle swarm optimization in multidimensional search space. IEEE Trans. Syst. Man Cybern. Part B 2009, 40, 298–319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Banks, A.; Vincent, J.; Anyakoha, C. A review of particle swarm optimization. Part I: Background and development. Nat. Comput. 2007, 6, 467–484. [Google Scholar] [CrossRef]
- Banks, A.; Vincent, J.; Anyakoha, C. A review of particle swarm optimization. Part II: Hybridisation, combinatorial, multicriteria and constrained optimization, and indicative applications. Nat. Comput. 2008, 7, 109–124. [Google Scholar] [CrossRef]
- Gong, D.; Lu, L.; Li, M. Robot path planning in uncertain environments based on particle swarm optimization. In Proceedings of the 2009 IEEE Congress on Evolutionary Computation, Trondheim, Norway, 18–21 May 2009; pp. 2127–2134. [Google Scholar]
- Gong, M.; Cai, Q.; Chen, X.; Ma, L. Complex network clustering by multiobjective discrete particle swarm optimization based on decomposition. IEEE Trans. Evol. Comput. 2013, 18, 82–97. [Google Scholar] [CrossRef]
- Sivakumar, P.; Grace, S.S.; Azeezur, R.A. Investigations on the impacts of uncertain wind power dispersion on power system stability and enhancement through PSO technique. In Proceedings of the 2013 International Conference on Energy Efficient Technologies for Sustainability, Nagercoil, India, 10–12 April 2013; pp. 1370–1375. [Google Scholar]
- Li, F.; Li, D.; Wang, C.; Wang, Z. Network signal processing and intrusion detection by a hybrid model of LSSVM and PSO. In Proceedings of the 2013 15th IEEE International Conference on Communication Technology, Guilin, China, 17–19 November 2013; pp. 11–14. [Google Scholar]
- Jun, Z.; Kanyu, Z. A Particle Swarm Optimization Approach for Optimal Design of PID Controller for Temperature Control in HVAC. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; pp. 230–233. [Google Scholar]
- Atyabi, A.; Luerssen, M.; Fitzgibbon, S.P.; Powers, D.M.W. PSO-Based Dimension Reduction of EEG Recordings: Implications for Subject Transfer in BCI. Neurocomputing 2013, 119, 319–331. [Google Scholar] [CrossRef]
- Mohan, S.; Mahesh, T.R. Particle Swarm Optimization based Contrast Limited enhancement for mammogram images. In Proceedings of the 2013 7th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 4–5 January 2013; pp. 384–388. [Google Scholar]
- Gorai, A.; Ghosh, A. Hue-preserving colour image enhancement using particle swarm optimization. In Proceedings of the 2011 IEEE Recent Advances in Intelligent Computational Systems, Trivandrum, India, 22–24 September 2011; pp. 563–568. [Google Scholar]
- Na, L.; Yuanxiang, L. Image Restoration Using Improved Particle Swarm Optimization. In Proceedings of the 2011 International Conference on Network Computing and Information Security, Guilin, China, 14–15 May 2011; pp. 394–397. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Price, K.; Storn, R.; Lampinen, J. Differential Evolution: A Practical Approach to Global Optimization; Springer: Berlin/Heidelberg, Germany, 2005; Volume 104, p. 542. [Google Scholar]
- Wu, Y.; Lee, W.; Chien, C. Modified the Performance of Differential Evolution Algorithm with Dual Evolution Strategy. Int. Conf. Mach. Learn. Comput. 2011, 3, 57–63. [Google Scholar]
- Muñoz, J.; López, B.; Quevedo, F.; Barber, R.; Garrido, S.; Moreno, L. Geometrically constrained path planning for robotic grasping with Differential Evolution and Fast Marching Square. Robotica 2023, 41, 414–432. [Google Scholar] [CrossRef]
- Mahmoud, Z.S.; Powers, D.; Sammut, K.; Yazdani, A.M. Differential evolution for efficient AUV path planning in time variant uncertain underwater environment. arXiv 2016, arXiv:1604.02523. [Google Scholar]
- Dragoi, E.; Curteanu, S.; Vlad, D. Differential evolution applications in electromagnetics. In Proceedings of the 2012 International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 25–27 October 2012; pp. 636–640. [Google Scholar]
- Myeong-Chun, L.; Sung-Bae, C. Interactive differential evolution for image enhancement application in smart phone. In Proceedings of the IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012; pp. 1–6. [Google Scholar]
- Yilmaz, A.R.; Yavuz, O.; Erkmen, B. Training multilayer perceptron using differential evolution algorithm for signature recognition application. In Proceedings of the 2013 21st Signal Processing and Communications Applications Conference (SIU), Haspolat, Turkey, 24–26 April 2013; pp. 1–4. [Google Scholar]
- Chiou, J.; Chang, C.; Wang, C. Hybrid differential evolution for static economic dispatch. In Proceedings of the 2014 International Symposium on Computer, Consumer and Control, Taichung, Taiwan, 10–12 June 2014; pp. 950–953. [Google Scholar]
- Karaboga, D. An Idea Based on Honeybee Swarm for Numerica Optimization; Technical Report TR06; Erciyes University: Talas/Kayseri, Türkiye, 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numeric function optimization: Artificial Bee Colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Karaboga, D. Artificial bee colony algorithm. Scholarpedia 2010, 5, 6915. [Google Scholar] [CrossRef]
- Singh, A. An artificial bee colony algorithm for the leaf-constrained minimum spanning tree problem. Appl. Soft Comput. 2009, 9, 625–631. [Google Scholar] [CrossRef]
- Abu-Mouti, F.S.; El-Hawary, M.E. Overview of Artificial Bee Colony (ABC) algorithm and its applications. In Proceedings of the 2012 IEEE International Systems Conference SysCon, Vancouver, BC, Canada, 19–22 March 2012; pp. 1–6. [Google Scholar]
- Gerhardt, E.; Gomes, H.M. Artificial Bee Colony (ABC) algorithm for engineering optimization problems. In Proceedings of the International Conference on Engineering Optimization, Rio de Janeiro, Brazil, 1–5 July 2012; pp. 1–11. [Google Scholar]
- Tan, L.; Shi, J.; Gao, J.; Wang, H.; Zhang, H.; Zhang, Y. Multi-UAV path planning based on IB-ABC with restricted planned arrival sequence. Robotica 2023, 41, 1244–1257. [Google Scholar] [CrossRef]
- Sharma, T.K.; Pant, M. Golden search based artificial bee colony algorithm and its application to solve engineering design problems. In Proceedings of the 2012 Second International Conference on Advanced Computing & Communication Technologies, Rohtak, India, 7–8 January 2012; pp. 156–160. [Google Scholar]
- Lee, C.H.; Park, J.Y.; Park, J.Y.; Han, S.Y. Application of artificial bee colony algorithm for structural topology optimization. In Proceedings of the 2012 8th International Conference on Natural Computation, Chongqing, China, 29–31 May 2012; pp. 1023–1025. [Google Scholar]
- Lee, T.E.; Cheng, J.H.; Jiang, L.L. A new artificial bee colony based clustering method and its application to the business failure prediction. In Proceedings of the 2012 International Symposium on Computer, Consumer and Control, Taichung, Taiwan, 4–6 June 2012; pp. 72–75. [Google Scholar]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]
- Krishnan, K.N.; Ghose, D. Glowworm swarm optimization for simultaneous capture of multiple local optima of multimodal functions. Swarm Intell. 2009, 3, 87–124. [Google Scholar] [CrossRef]
- Krishnan, K.N.; Ghose, D. Glowworm swarm optimisation: A new method for optimising multi-modal functions. Int. J. Comput. Intell. Stud. 2009, 1, 93–119. [Google Scholar]
- Krihnanand, K.N.; Amruth, P.; Guruprasad, M.H. Glowworm-inspired Robot Swarm for Simultaneous Taxis towards Multiple Radiation Sources. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 958–963. [Google Scholar]
- Zainal, N.; Zain, A.M.; Radzi, N.H.; Udin, A. Glowworm swarm optimization (GSO) algorithm for optimization problems: A state-of-the-art review. Appl. Mech. Mater. 2013, 421, 507–511. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, X.; Miao, Y. Localization of multiple odor sources using modified glowworm swarm optimization with collective robots. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 1899–1904. [Google Scholar]
- Goel, U.; Varshney, S.; Jain, A.; Maheshwari, S.; Shukla, A. Three dimensional path planning for UAVs in dynamic environment using glow-worm swarm optimization. Procedia Comput. Sci. 2018, 133, 230–239. [Google Scholar] [CrossRef]
- Khan, A.; Aftab, F.; Zhang, Z. Self-organization based clustering scheme for FANETs using Glowworm Swarm Optimization. Phys. Commun. 2019, 36, 100769. [Google Scholar] [CrossRef]
- He, D.X.; Zhu, H.Z.; Liu, G.-Q. Glowworm swarm optimization algorithm for solving multi-constrained QoS multicast routing problem. In Proceedings of the 2011 Seventh International Conference on Computational Intelligence and Security, Sanya, China, 3–4 December 2011; pp. 66–70. [Google Scholar]
- Krishnan, K.N.; Ghose, D. Detection of multiple source locations using a glowworm metaphor with applications to collective robotics. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, Pasadena, CA, USA, 8–10 June 2005; pp. 84–91. [Google Scholar]
- Senthilnath, J.; Omkar, S.N.; Mani, V.; Tejovanth, N.; Diwakar, P.G.; Shenoy, A. Multi-spectral satellite image classification using glowworm swarm optimization. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 47–50. [Google Scholar]
- McGill, K.; Taylor, S. Comparing swarm algorithms for large scale multi-source localization. In Proceedings of the 2009 IEEE International Conference on Technologies for Practical Robot Applications, Woburn, MA, USA, 9–10 November 2009; pp. 48–54. [Google Scholar]
- Menon, P.P.; Ghose, D. Simultaneous source localization and boundary mapping for contaminants. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 4174–4179. [Google Scholar]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S.; Deb, S. Engineering optimisation by cuckoo search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Multi-objective cuckoo search for design optimization. Comput. Oper. Res. 2013, 40, 1616–1624. [Google Scholar] [CrossRef]
- Xie, C.; Zheng, H. Application of improved Cuckoo search algorithm to path planning unmanned aerial vehicle. In Proceedings of the Intelligent Computing Theories and Application: 12th International Conference, ICIC 2016, Lanzhou, China, 2–5 August 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 722–729. [Google Scholar]
- Chaowanawatee, K.; Heednacram, A. Implementation of cuckoo search in RBF neural network for flood forecasting. In Proceedings of the 2012 4th International Conference on Computational Intelligence, Communication Systems and Networks, Phuket, Thailand, 24–26 July 2012; pp. 22–26. [Google Scholar]
- Kumar, A.; Chakarverty, S. Design optimization for reliable embedded system using Cuckoo Search. In Proceedings of the 2011 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; Volume 1, pp. 264–268. [Google Scholar]
- Khodier, M. Optimisation of antenna arrays using the cuckoo search algorithm. IET Microwaves Antennas Propag. 2013, 7, 458–464. [Google Scholar] [CrossRef]
- Vo, D.N.; Schegner, P.; Ongsakul, W. Cuckoo search algorithm for non-convex economic dispatch. Gener. Transm. Distrib. 2013, 7, 645–654. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S.; Karamanoglu, M.; Xingshi, N. Cuckoo search for business optimization applications. In Proceedings of the 2012 National Conference on Computing and Communication Systems, Durgapur, India, 21–22 November 2012; pp. 1–5. [Google Scholar]
- Jati, G.K.; Manurung, H.M.; Suyanto, S. Discrete cuckoo search for traveling salesman problem. In Proceedings of the 2012 7th International Conference on Computing and Convergence Technology (ICCCT), Seoul, Republic of Korea, 3–5 December 2012; pp. 993–997. [Google Scholar]
- Sharkey, A.J. Swarm robotics and minimalism. Connect. Sci. 2007, 19, 245–260. [Google Scholar] [CrossRef]
- Programmable Robot Swarms. Available online: https://wyss.harvard.edu/technology/programmable-robot-swarms/ (accessed on 6 November 2019).
- Caprari, G.; Balmer, P.; Piguet, R.; Siegwart, R. The Autonomous Micro Robot “Alice”: A platform for scientific and commercial applications. In Proceedings of the MHA’98, 1998 International Symposium on Micromechatronics and Human Science Creation of New Industry (Cat. No. 98TH8388), Nagoya, Japan, 25–28 November 1998; pp. 231–235. [Google Scholar]
- Arvin, F.; Samsudin, K.; Ramli, A.R. Development of a miniature robot for swarm robotic application. Int. J. Comput. Electr. Eng. 2009, 1, 436–442. [Google Scholar] [CrossRef]
- Arvin, F.; Murray, J.; Zhang, C.; Yue, S. Colias: An autonomous micro robot for swarm robotic applications. Int. J. Adv. Robot. Syst. 2014, 11, 113. [Google Scholar] [CrossRef]
- Soares, J.M.; Navarro, I.; Martinoli, A. The Khepera IV mobile robot: Performance evaluation, sensory data and software toolbox. In Proceedings of the Robot 2015: Second Iberian Robotics Conference: Advances in Robotics, Lisbon, Portugal, 19–21 November 2015; Volume 1, pp. 767–781. [Google Scholar]
- Pickem, D.; Lee, M.; Egerstedt, M. The GRITSBot in its natural habitat-a multi-robot testbed. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4062–4067. [Google Scholar]
- Jones, S.; Studley, M.; Hauert, S.; Winfield, A.F. A two teraflop swarm. Front. Robot. AI 2018, 5, 11. [Google Scholar] [CrossRef] [Green Version]
- Riedo, F.; Chevalier, M.; Magnenat, S.; Mondada, F. Thymio II, a robot that grows wiser with children. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and Its Social Impacts, Tokyo, Japan, 7–9 November 2013; pp. 187–193. [Google Scholar]
- Wilson, S.; Gameros, R.; Sheely, M.; Lin, M.; Dover, K.; Gevorkyan, R.; Haberl, M.; Bertozzi, A.; Berman, S. Pheeno, a versatile swarm robotic research and education platform. IEEE Robot. Autom. Lett. 2016, 1, 884–891. [Google Scholar] [CrossRef] [Green Version]
- Jdeed, M.; Zhevzhyk, S.; Steinkellner, F.; Elmenreich, W. Spiderino-a low-cost robot for swarm research and educational purposes. In Proceedings of the 2017 13th Workshop on Intelligent Solutions in Embedded Systems (WISES), Hamburg, Germany, 12–13 June 2017; pp. 35–39. [Google Scholar]
- Seyfried, J.; Szymanski, M.; Bender, N.; Estana, R.; Thiel, M.; Wörn, H. The I-SWARM project: Intelligent small world autonomous robots for micro-manipulation. In Proceedings of the Swarm Robotics: SAB 2004 International Workshop, Santa Monica, CA, USA, 17 July 2004. [Google Scholar]
- Le Goc, M.; Kim, L.H.; Parsaei, A.; Fekete, J.D.; Dragicevic, P.; Follmer, S. Zooids: Building blocks for swarm user interfaces. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 97–109. [Google Scholar]
- Dhanaraj, N.; Hewitt, N.; Edmonds-Estes, C.; Jarman, R.; Seo, J.; Gunner, H. Adaptable platform for interactive swarm robotics (apis): A human-swarm interaction research testbed. In Proceedings of the 19th International Conference on Advanced Robotics (Belo Horizonte), Belo Horizonte, Brazil, 2–6 December 2019; pp. 720–726. [Google Scholar] [CrossRef]
- Kettler, A.; Szymanski, M.; Wörn, H. The wanda robot and its development system for swarm algorithms. In Advances in Autonomous Mini Robots, Proceedings of the 6-th AMiRE Symposium, Bielefeld, Germany, 23–25 May 2011; Springer: Berlin/Heidelberg, Germany, 2012; pp. 133–146. [Google Scholar]
- Klingner, J.; Kanakia, A.; Farrow, N.; Reishus, D.; Correll, N. A stick-slip omnidirectional powertrain for low-cost swarm robotics: Mechanism, calibration, and control. In Proceedings of the 2014 IEEE International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 846–851. [Google Scholar] [CrossRef]
- Mondada, F.; Pettinaro, G.C.; Kwee, I.W.; Guignard, A.; Gambardella, L.M.; Floreano, D.; Nolfi, S.; Deneubourg, J.L.; Dorigo, M. SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities; Technical Report; ETH-Zürich: Zürich, Switzerland, 2002. [Google Scholar]
- Groß, R.; Bonani, M.; Mondada, F.; Dorigo, M. Autonomous self-assembly in swarm-bots. IEEE Trans. Robot. 2006, 22, 1115–1130. [Google Scholar]
- Dorigo, M.; Floreano, D.; Gambardella, L.M.; Mondada, F.; Nolfi, S.; Baaboura, T.; Birattari, M.; Bonani, M.; Brambilla, M.; Brutschy, A.; et al. Swarmanoid: A novel concept for the study of heterogeneous robotic swarms. IEEE Robot. Autom. Mag. 2013, 20, 60–71. [Google Scholar] [CrossRef] [Green Version]
- Petersen, K.H.; Nagpal, R.; Werfel, J.K. Termes: An autonomous robotic system for three-dimensional collective construction. In Robotics: Science and Systems VII; MIT Press: Cambridge, CA, USA, 2011. [Google Scholar]
- Kernbach, S.; Meister, E.; Schlachter, F.; Jebens, K.; Szymanski, M.; Liedke, J.; Laneri, D.; Winkler, L.; Schmickl, T.; Thenius, R.; et al. Symbiotic robot organisms: REPLICATOR and SYMBRION projects. In Proceedings of the 8th Workshop on Performance Metrics for Intelligent Systems, Gaithersburg, MD, USA, 19–21 August 2008; pp. 62–69. [Google Scholar]
- Duff, D.; Yim, M.; Roufas, K. Evolution of polybot: A modular reconfigurable robot. In Proceedings of the Harmonic Drive Intelligent Symposium, Nagano, Japan, 19 November 2001. [Google Scholar]
- Murata, S.; Yoshida, E.; Kamimura, A.; Kurokawa, H.; Tomita, K.; Kokaji, S. M-TRAN: Self-reconfigurable modular robotic system. IEEE/ASME Trans. Mechatronics 2002, 7, 431–441. [Google Scholar] [CrossRef]
- Kurokawa, H.; Kamimura, A.; Yoshida, E.; Tomita, K.; Kokaji, S.; Murata, S. M-TRAN II: Metamorphosis from a four-legged walker to a caterpillar. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 3, pp. 2454–2459. [Google Scholar]
- Kurokawa, H.; Tomita, K.; Kamimura, A.; Kokaji, S.; Hasuo, T.; Murata, S. Distributed self-reconfiguration of M-TRAN III modular robotic system. Int. J. Robot. Res. 2008, 27, 373–386. [Google Scholar] [CrossRef]
- Brandt, D.; Christensen, D.J.; Lund, H.H. ATRON robots: Versatility from self-reconfigurable modules. In Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 26–32. [Google Scholar]
- Castano, A.; Behar, A.; Will, P.M. The Conro modules for reconfigurable robots. IEEE/ASME Trans. Mechatronics 2002, 7, 403–409. [Google Scholar] [CrossRef] [Green Version]
- Wei, H.; Cai, Y.; Li, H.; Li, D.; Wang, T. Sambot: A self-assembly modular robot for swarm robot. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 66–71. [Google Scholar]
- Zykov, V.; Mytilinaios, E.; Desnoyer, M.; Lipson, H. Evolved and designed self-reproducing modular robotics. IEEE Trans. Robot. 2007, 23, 308–319. [Google Scholar] [CrossRef]
- Cheng, J.; Cheng, W.; Nagpal, R. Robust and self-repairing formation control for swarms of mobile agents. In Proceedings of the Twentieth National Conference on Artificial Intelligence and the Seventeenth Innovative Applications of Artificial Intelligence Conference, Pittsburgh, PA, USA, 9–13 July 2005; Volume 5. [Google Scholar]
- Swetha, S.; Anandan, R.; Kalaivani, K. An investigation of micro aerial vehicles (μAV). Int. J. Eng. Technol. 2018, 7, 174–177. [Google Scholar] [CrossRef]
- Roberts, J.F.; Stirling, T.S.; Zufferey, J.; Floreano, D. Quadrotor using minimal sensing for autonomous indoor flight. In Proceedings of the European Micro Air Vehicle Conference and Flight Competition (Toulouse), Toulouse, France, 20 September 2007. [Google Scholar]
- Oung, R.; D’Andrea, R. The distributed flight array. Mechatronics 2011, 21, 908–917. [Google Scholar] [CrossRef] [Green Version]
- Preiss, J.A.; Honig, W.; Sukhatme, G.S.; Ayanian, N. Crazyswarm: A large nano-quadcopter swarm. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3299–3304. [Google Scholar]
- Heckert, A. Entwicklung eines Dynamischen Modells und Parameterschätzung für den FINken 3 Quadkopter. Bachelor’s Thesis, Fakultät für Elektrotechnik und Informationstechnik, Otto-von-Guericke-Universitat Magdeburg, Magdeburg, Germany, 2016. [Google Scholar]
- Osterloh, C.; Pionteck, T.; Maehle, E. MONSUN II: A small and inexpensive AUV for underwater swarms. In Proceedings of the 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; pp. 1–6. [Google Scholar]
- Christensen, A.L.; Duarte, M.; Postolache, O.; Sargento, S.; Oliveira, M.J.; Santana, P.; Nunes, L.; Velez, F.; Oliveira, S.M.; Sebastião, P.; et al. Design of communication and control for swarms of aquatic surface drones. Des. Commun. Control. Swarms Aquat. Surf. Drones 2015, 548–555. [Google Scholar] [CrossRef] [Green Version]
- Duarte, M.; Costa, V.; Gomes, J.; Rodrigues, T.; Silva, F.; Oliveira, S.M.; Christensen, A.L. Evolution of collective behaviors for a real swarm of aquatic surface robots. PLoS ONE 2016, 11, e0151834. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, C.K.; Fahimi, F.; Griffin, R.; Landrum, D.B.; Mesmer, B.; Zhang, G.; Lee, T.; Aono, H.; Pohly, J.; McCain, J.; et al. Marsbee-Swarm of Flapping Wing Flyers for Enhanced Mars Exploration. 2019. Available online: https://ntrs.nasa.gov/citations/20190002496 (accessed on 1 March 2023).
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global food demand and the sustainable intensification of agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ball, D.; Ross, P.; English, A.; Patten, T.; Upcroft, B.; Fitch, R.; Sukkarieh, S.; Wyeth, G.; Corke, P. Robotics for sustainable broad-acre agriculture. In Proceedings of the Field and Service Robotics: Results of the 9th International Conference, Brisbane, Australia, 9–11 December 2013; Springer: Berlin/Heidelberg, Germany, 2015; pp. 439–453. [Google Scholar]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a mobile agricultural robot swarm for a seeding task. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6879–6886. [Google Scholar]
- Saez-Pons, J.; Alboul, L.; Penders, J.; Nomdedeu, L. Multi-robot team formation control in the GUARDIANS project. Ind. Robot. Int. J. 2010, 37, 372–383. [Google Scholar] [CrossRef] [Green Version]
- Telegraph, T. The Science Behind the Swarm of Robots Picking Your Grocery Order. Available online: https://www.telegraph.co.uk/technology/2018/06/04/science-behind-swarm-robots-picking-grocery-order/ (accessed on 2 August 2018).
- Brown, A. Rise of the Machines? Amazon’s Army of More Than 100,000 Warehouse Robots Still Can’t Replace Humans Because They Lack ‘Common Sense’. Available online: http://www.dailymail.co.uk/sciencetech/article5808319/Amazon-100-000-warehouse-robots-company-insists-replacehumans.html (accessed on 2 August 2019).
- Pickering, J. Take a Look Inside Alibaba’s Smart Warehouse Where Robots do 70% of the Work. Available online: https://www.businessinsider.com/inside-alibaba-smart-warehouse-robots-70-per-cent-work-technologylogistics-2017-9?IR=T (accessed on 2 August 2019).
- Chung, T.H. OFFensive Swarm-Enabled Tactics (OFFSET). Available online: https://www.darpa.mil/attachments/OFFSET_ProposersDay.pdf (accessed on 2 April 2019).
- Mizokami, K. The Pentagon’s Autonomous Swarming Drones Are the Most Unsettling Thing You’ll See Today. Available online: https://www.popularmechanics.com/military/aviation/a24675/pentagon-autonomousswarming-drones/ (accessed on 2 April 2018).
- Varga, M.; Basiri, M.; Heitz, G.; Floreano, D. Distributed formation control of fixed wing micro aerial vehicles for area coverage. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 669–674. [Google Scholar]
- Hauert, S.; Zufferey, J.C.; Floreano, D. Evolved swarming without positioning information: An application in aerial communication relay. Auton. Robot. 2009, 26, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Flushing, E.F.; Gambardella, L.M.; Di Caro, G.A. A mathematical programming approach to collaborative missions with heterogeneous teams. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 396–403. [Google Scholar]
- Albani, D.; Manoni, T.; Arik, A.; Nardi, D.; Trianni, V. Field coverage for weed mapping: Toward experiments with a UAV swarm. In Proceedings of the Bio-inspired Information and Communication Technologies: 11th EAI International Conference, BICT 2019, Pittsburgh, PA, USA, 13–14 March 2019; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Barrett, B. Intel Lights Up the Night with 500 ‘Shooting Star’ Drones. Available online: https://www.wired.com/story/more-inclusive-fourth-of-july-drone-show/ (accessed on 2 August 2019).
- Jeradi, A.; Raeissi, M.M.; Farinelli, A.; Brooks, N.; Scerri, P. Focused Exploration for Cooperative Robotic Watercraft. In Proceedings of the 2015 International Workshop on Artificial Intelligence and Robotics, Las Vegas, NV, USA, 9–10 May 2015; pp. 83–93. [Google Scholar]
- Maccready, T. Multiscale vorticity from a swarm of drifters. In Proceedings of the 2015 IEEE/OES Eleveth Current, Waves and Turbulence Measurement (CWTM), St. Petersburg, FL, USA, 2–6 March 2015; pp. 1–6. [Google Scholar]
- Real-Arce, D.A.; Morales, T.; Barrera, C.; Hernández, J.; Llinás, O. Smart and networking underwater robots in cooperation meshes: The swarms ECSEL: H2020 project. Instrum. Viewp. 2016, 19. [Google Scholar]
- Rodríguez-Molina, J.; Bilbao, S.; Martínez, B.; Frasheri, M.; Cürüklü, B. An optimized, data distribution service-based solution for reliable data exchange among autonomous underwater vehicles. Sensors 2017, 17, 1802. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Cürüklü, B.; Bastos, J.; Sucasas, V.; Fernandez, J.A.; Rodriguez, J. A probabilistic and highly efficient topology control algorithm for underwater cooperating AUV networks. Sensors 2017, 17, 1022. [Google Scholar] [CrossRef] [Green Version]
- Smalley, D. Autonomous Swarmboats: New Missions, Safe Harbors. Off. Nav. Res. 2016, 14. [Google Scholar]
- Hsu, J. US navy’s drone boat swarm practices harbor defense. IEEE Spectr. 2016, 19. [Google Scholar]
- Escoubet, C.P.; Fehringer, M.; Goldstein, M. Introduction the cluster mission. In Proceeding Annual Geophysics; Copernicus GmbH: Göttingen, Germany, 2001; Volume 19, pp. 1197–1200. [Google Scholar]
- Sneyd, J.; Theraula, G.; Bonabeau, E.; Deneubourg, J.L.; Franks, N.R. Self-Organization in Biological Systems; Princeton University Press: Princeton, NJ, USA, 2003. [Google Scholar]
- Sumpter, D.J. Collective animal behavior. In Collective Animal Behavior; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Dorigo, M. Ant colony optimization. Scholarpedia 2007, 2, 1461. [Google Scholar] [CrossRef]
- Dorigo, M.; de Oca, M.A.; Engelbrecht, A. Particle swarm optimization. Scholarpedia 2008, 3, 1486. [Google Scholar] [CrossRef]
- Di Caro, G.; Dorigo, M. AntNet: Distributed stigmergetic control for communications networks. J. Artif. Intell. Res. 1998, 9, 317–365. [Google Scholar] [CrossRef]
- Moussaïd, M.; Helbing, D.; Theraulaz, G. How simple rules determine pedestrian behavior and crowd disasters. Proc. Natl. Acad. Sci. USA 2011, 108, 6884–6888. [Google Scholar] [CrossRef] [Green Version]
- Jeon, S.; Kim, S.; Ha, S.; Lee, S.; Kim, E.; Kim, S.Y.; Park, S.H.; Jeon, J.H.; Kim, S.W.; Moon, C.; et al. Magnetically actuated microrobots as a platform for stem cell transplantation. Sci. Robot. 2019, 4, eaav4317. [Google Scholar] [CrossRef]
- Dong, X.; Sitti, M. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. Int. J. Robot. Res. 2020, 39, 617–638. [Google Scholar] [CrossRef]
- Sitti, M. Mobile Microrobotics; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Nouyan, S.; Groß, R.; Bonani, M.; Mondada, F.; Dorigo, M. Teamwork in self-organized robot colonies. IEEE Trans. Evol. Comput. 2009, 13, 695–711. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1990–2000 | The first robot tests show self-organization through indirect and local interactions, clearly inspired by swarm intelligence. | SW |
| 2000–2005 | The ability to generate swarms of robots that work together has now been expanded to a variety of additional tasks, including object handling, task allocation, and occupations that require significant teamwork to achieve. | SW |
| 2002–2006 | Swarm-bots is a project that shows how robot swarms self-assemble. Robots can construct pulling chains and massive constructions capable of transporting large loads and dealing with tough terrain. | HW and SW |
| 2004–2008 | The evolving swarm robotics technique was devised after the first demonstrations of autonomous assembly of robot swarms using evolutionary algorithms. | SW |
| 2005–2009 | For swarm robotics research, the first attempts at building standard swarm robotics platforms and small robots. | HW |
| 2006–2010 | Swarmanoid showed heterogeneous robot swarms made up of three different types of robots: flying, climbing, and ground-based robots for the first time. | HW and SW |
| 2010–2015 | Advanced autonomous design methods such as AutoMoDe, novelty search, design patterns, mean-field models, and optimal stochastic approaches are all employed in the creation of robot swarms. | SW |
| 2016–2020 | Decentralized solutions have been investigated and deployed as swarms of flying drones become available for investigation. | HW and SW |
| 2020–2025 | The first example of robot swarms that may self-learn suitable swarm behaviour in response to a specific set of challenges. | SW |
| 2025–2030 | Marine and deep-sea robotic swarms will be utilized for ecological monitoring, surveillance, and fishing, among other things. | HW |
| 2030–2040 | Small rover swarms will be utilized for the first mission to the Moon and Mars to expand the exploration area and showcase on-site construction capabilities. | HW |
| 2040–2045 | Soft-bodied robot swarms measuring in millimeters will be deployed to explore agricultural fields and aquatic areas to identify plastic usage and assist with pest control. | HW and SW |
| 2035–2050 | Clinical research with human volunteers will begin after nanoscale robot swarms have been shown for therapeutic objectives such as customized medication delivery. | HW and SW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahzad, M.M.; Saeed, Z.; Akhtar, A.; Munawar, H.; Yousaf, M.H.; Baloach, N.K.; Hussain, F. A Review of Swarm Robotics in a NutShell. Drones 2023, 7, 269. https://doi.org/10.3390/drones7040269
Shahzad MM, Saeed Z, Akhtar A, Munawar H, Yousaf MH, Baloach NK, Hussain F. A Review of Swarm Robotics in a NutShell. Drones. 2023; 7(4):269. https://doi.org/10.3390/drones7040269
Chicago/Turabian StyleShahzad, Muhammad Muzamal, Zubair Saeed, Asima Akhtar, Hammad Munawar, Muhammad Haroon Yousaf, Naveed Khan Baloach, and Fawad Hussain. 2023. "A Review of Swarm Robotics in a NutShell" Drones 7, no. 4: 269. https://doi.org/10.3390/drones7040269
APA StyleShahzad, M. M., Saeed, Z., Akhtar, A., Munawar, H., Yousaf, M. H., Baloach, N. K., & Hussain, F. (2023). A Review of Swarm Robotics in a NutShell. Drones, 7(4), 269. https://doi.org/10.3390/drones7040269