1. Introduction
Drone detection in complex, low-altitude environments is an important research area. Visible light images have high resolutions and can capture drone target detail information better, but visible-light-based drone detection systems cannot work in night scenes and low-light conditions. Millimeter-wave radar has a long detection range and wide coverage, but small quadrotor drones have a small reflection cross-section for millimeter-wave radar, making millimeter-wave-radar-based drone detection systems unable to detect drones better. Additionally, millimeter-wave radar is expensive. Infrared sensors are very sensitive to the detection of heat sources and can measure the temperatures of objects at a certain distance without making contact with the target. A working drone acts as a source of heat radiation and will continuously radiate heat outward in flight, so infrared-thermography-based detection is an important sensing method for defense against low-altitude drones, especially in dark environments.
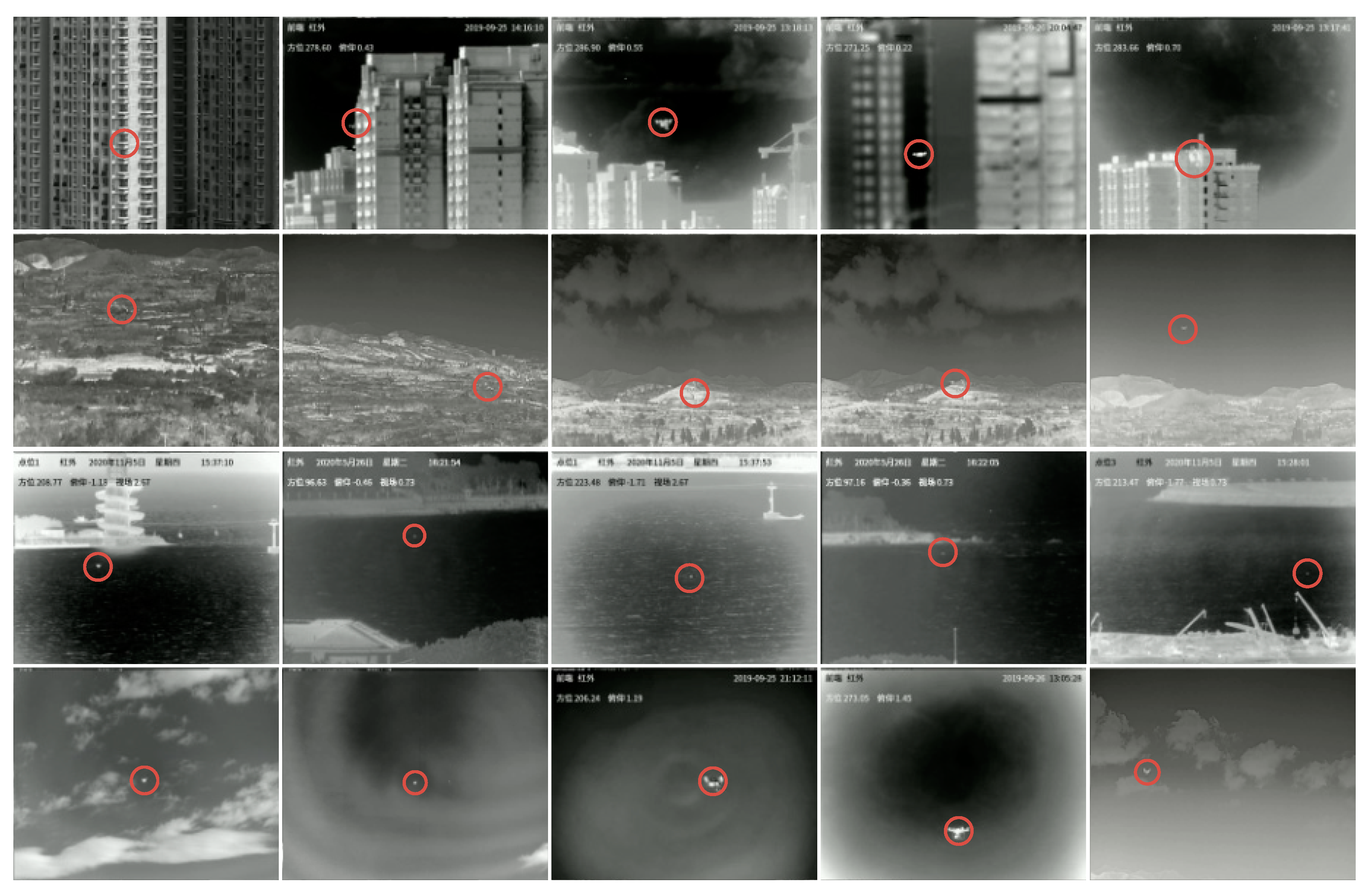
The accurate detection and identification of drones is extremely challenging due to three main factors. The first factor is that the air contains infrared interference sources such as high, bright backgrounds with radiation sources, the background edges of complex clouds and blind flash sourcein the system. The second factor is the small size of the drone target and the fact that one always wants to find the target at a longer distance in order to confirm the intrusion of the target as early as possible; such targets are imaged in the image with a smaller area after being imaged by the infrared system. The third factor is the poor quality of the resulting infrared image due to the sensitivity of the detection device, atmospheric scattering, background temperature noise and other factors. We show four infrared small drone targets in a complex scene at a low altitude in
Figure 1. The first image contains a ship in a complex urban scene with buildings in the background; the second image presents a mountainous scene with numerous miscellaneous sources of radiation similar in shape to the drone; the third image contains a faint, five-pixel-sized target in a sea scene; the fourth image contains a highlighted target against a cloudy background. The infrared images of the targets to be detected contain weak signals and lack contour and texture information.
There are a number of traditional infrared target detection methods that can be used to detect drones, including filter-based [
1], patch-image [
2], and rank-based [
3] methods. The detection performances of traditional detection methods rely heavily on the effectiveness of manually extracting target features, which is insufficient for use in complex scenarios. In particular, for drones flying at low altitudes with large target background differences and unpredictable scene information, traditional detection methods cannot guarantee that they will maintain their robustness in extreme environments. Therefore, the traditional methods based on the manual extraction of target features are not suitable for practical applications.
The current target detection methods based on convolutional neural networks (CNNs) have great potential because convolutional neural networks demonstrate strong representability and can effectively extract target features for learning and training detection algorithms [
4,
5,
6,
7]. The convolutional neural network algorithm effectively combines the candidate box and a convolutional neural network, making a significant breakthrough in the field of target detection. In the task of drone defense and identification based on infrared images, due to the existence of multiple scenes and multiple drone spans, which cause the target to present in a weak and small state in the IR image, the pixel resolution accounts for a small percentage. According to the definition of small targets by international standards, a target with fewer than 32 × 32 pixel values can be recognized as a small target, and most of the pixel values of drones in images are less than 32 × 32, which are typical of small infrared targets. Therefore, infrared small target detection based on a convolutional neural network (CNN) is a challenging problem.
Recently, strategies based on segmentation methods are attracting an increasing amount attention because of their ability to classify and locate objects at the pixel level [
8]. Hao et al. proposed the use of BlendMask to extract more accurate instance segmentation features by fusing top-level and low-level semantic information with a more reasonable blender module [
9]. Dai et al. proposed BoxInst, which only requires the box information of a target to predict the mask of a target [
10]. Zhi et al. was proposed CondInst to ensure high accuracy without the assistance of a detector [
11]. Daniel et al. proposed YOLACT++, which demonstrates detection speeds up to 33.5 fps [
12]. Wang et al. also proposed SOLOv2, which was based on SOLO, and then proposed the idea of using dynamic learning to segment the target mask, decomposing it into two branches: the learning mask kernel and the generation mask [
13]. He Keming et al. proposed Mask R-CNN, Mask R-CNN can effectively detect the target and output high quality instance segmentation mask [
14]. YOLOv5 and YOLOv7 implemented instance segmentation by adding mask branches [
15]. Pixel-level target detection based on instance segmentation is expected to suppress the influence of complex backgrounds and retain more infrared small target information [
16,
17]. However, in the process of feature extraction, approaches based on segmentation methods may still have the problem of target feature loss in the deep network, which can be attributed to the four factors described below.
The first factor is the large size of the convolutional step in the convolutional neural network. Target detection algorithms use convolutional neural networks as feature extraction tools; the feature map of the target continues to shrink during the convolution of the network [
18,
19], and the convolution step length is likely to be larger than the infrared small target size, which makes it difficult to transfer infrared small target features to the deep network [
20,
21,
22]. The second factor is that the distribution of the dataset is not ideal. In the target detection datasets that are currently commonly used, such as MSCOCO [
23], the number of samples of small targets accounts for a relatively small number, and the size difference between large and small targets is relatively large; thus, the detection algorithm has difficulty in adapting to changes in the scale of the target.
The third factor is the suboptimal hyperparameter setting of the a priori anchor. The sizes of infrared small targets often differ greatly from the set anchor box sizes, resulting in only a small portion of priori boxes overlapping with the true boxes, thus affecting detection performance. The fourth factor is the suboptimal setting of the intersection of union (IoU) threshold. The IoU between the candidate bounding box and ground truth box is small, the size of the IoU threshold directly affects the selection of positive and negative samples.
Currently, the means of improving the performance of infrared small target detection are mainly divided into four development directions.
- (1)
Generative Adversarial Networks
A generative adversarial network is a deep generative model that learns to generate new data via adversarial training. A generator is used to generate an image after receiving random noise. A discriminator is used to discriminate whether an image is a real image in the dataset or a generator-generated image [
24]. Li et al. proposed Perceptual to divide the images into those containing small and large targets, providing the first work to improve a small target detection algorithm based on GAN [
25]. Kim et al. proposed a method that can generate synthetic training data for infrared small target detection [
26]. Noh et al. modeled the target details by constantly adding new layers at the beginning of the training process when the output resolution of the Generator and Discriminator was low [
27]. A method based on adversarial generative learning can effectively enhance the detail information of images, but there are two difficulties. Firstly, the loss function of a GAN in the training process is difficult to converge, leading to unstable experimental results. Secondly, during the training process, the generator generates limited samples, and the model is prone to collapse when the learning process stops, leading to errors in the final detection.
- (2)
Multi-Scale Learning
The working theory of multi-scale learning is to use the details in the shallow convolution layer to help provide the location information of an infrared small target and to use the semantic information in the deep network to realize the classification of the target. However, the training of CNN models based on feature pyramids has very high computing power and memory requirements. In order to reduce computational resources and obtain better feature fusion, Lin et al. created a feature pyramid with strong semantic features at all levels using only one scale of input [
28]. Cui et al. proposed a jump connection to fuse more scale features for the problem that the feature information of small targets is still incomplete after multiple samplings [
29].
- (3)
Use of Feature Context Information
Infrared small targets account for a very small proportion of an image, and the information obtained from the local area of the image is very limited. In addition, infrared small target detectors usually ignore the contextual features outside the local area. Therefore, researchers have proposed a detection method based on contextual information by using the relationships between small targets and other targets or the background. Zagoruyko et al. used the region cropping method to crop four different multiples of regions at the center of the original region proposal and then performed region of interest pooling to cascade the pooled information together to achieve the effect of fusing contextual information [
30]. Guan et al. constructed context-aware features using the pyramidal pooling of multilayer context information [
31]. Hu et al. designed context-aware target region pooling by adding the proportion of context information to the feature map to avoid losing small target information [
32].
- (4)
Improvement of Loss Function
The loss function is a means of measuring the gap between the predicted and actual values of the output of a neural network. In a neural-network-based target detection task, a metric called the intersection of union (IoU) is commonly used. The IoU can describe the relationship between the prediction frame and the real frame well, but the value of the IoU will be zero if the two target frames do not overlap [
33]. Hamid et al. proposed the GIoU, which solves the problem that when the two target boxes do not intersect, the gradient is zero and cannot train the network [
34]. Zheng et al. proposed the DIoU, which considers the distance between the target and the prediction, overlap rate and scale to make the target box regression more stable [
35]. The authors of the DIOU also proposed the CIOU, which takes into account the aspect ratios of the boxes [
35]. Zhang et al. proposed EIOU loss and added focal to focus on high-quality predictor boxes, introducing focal loss to optimize the sample imbalance in the bounding box regression task so that the regression process focuses on high-quality anchor boxes [
36].
In short, detecting small drones in infrared images is challenging. The traditional target detection algorithm cannot adapt to the complex scene, especially when the drone target scale is small and the background noise is complex. The target detection method based on CNN cannot accurately detect the infrared small target. Pixel-level target detection based on instance segmentation is expected to suppress the influence of a complex background and retain more infrared small target information [
16,
17]. However, in the process of feature extraction, there may still be the problem of target feature loss. To solve this problem, we investigated the causes of infrared small target feature loss in the deep network and the corresponding solutions.
Our research contributions will be detailed later and can be summarized as follows:
- (1)
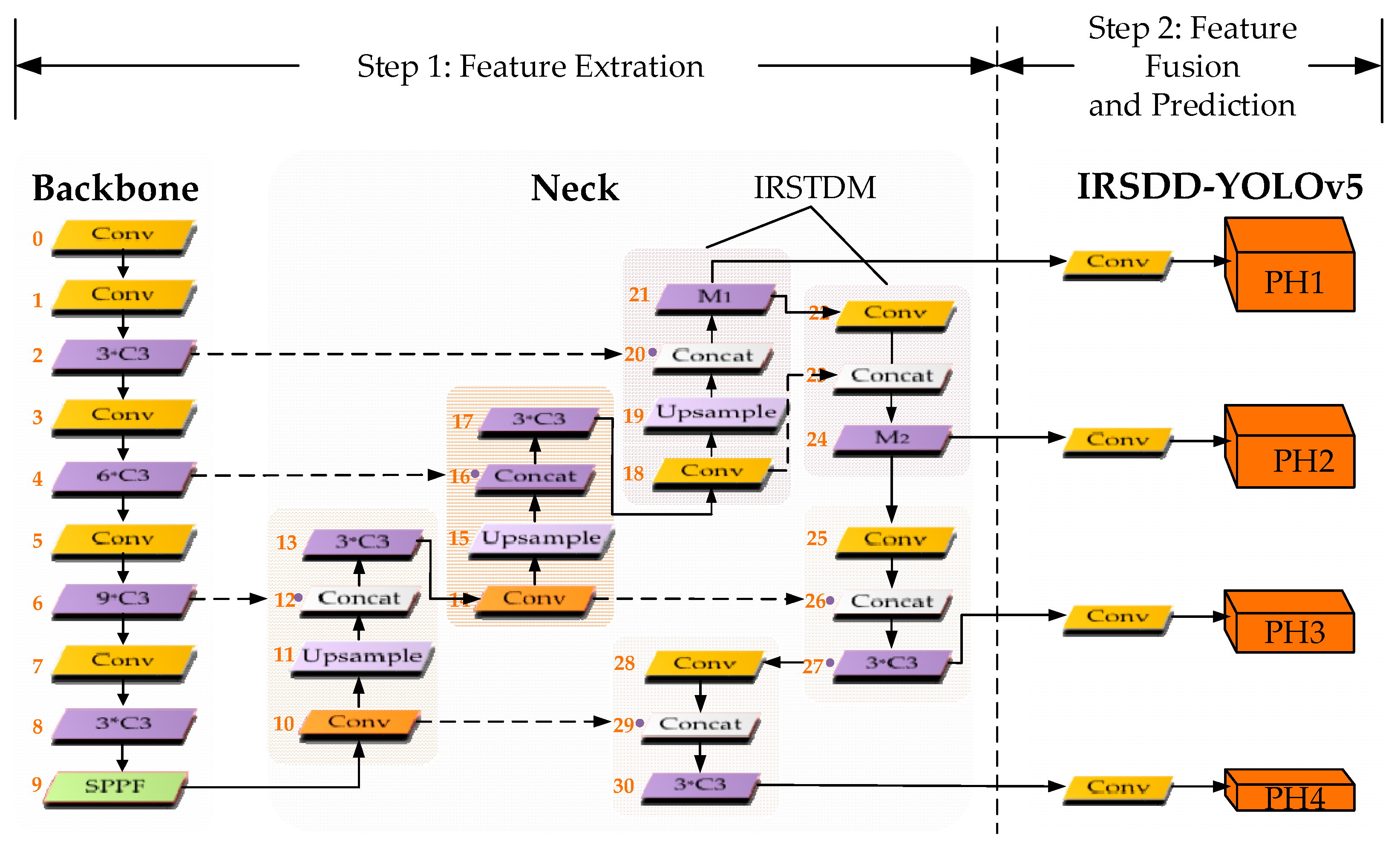
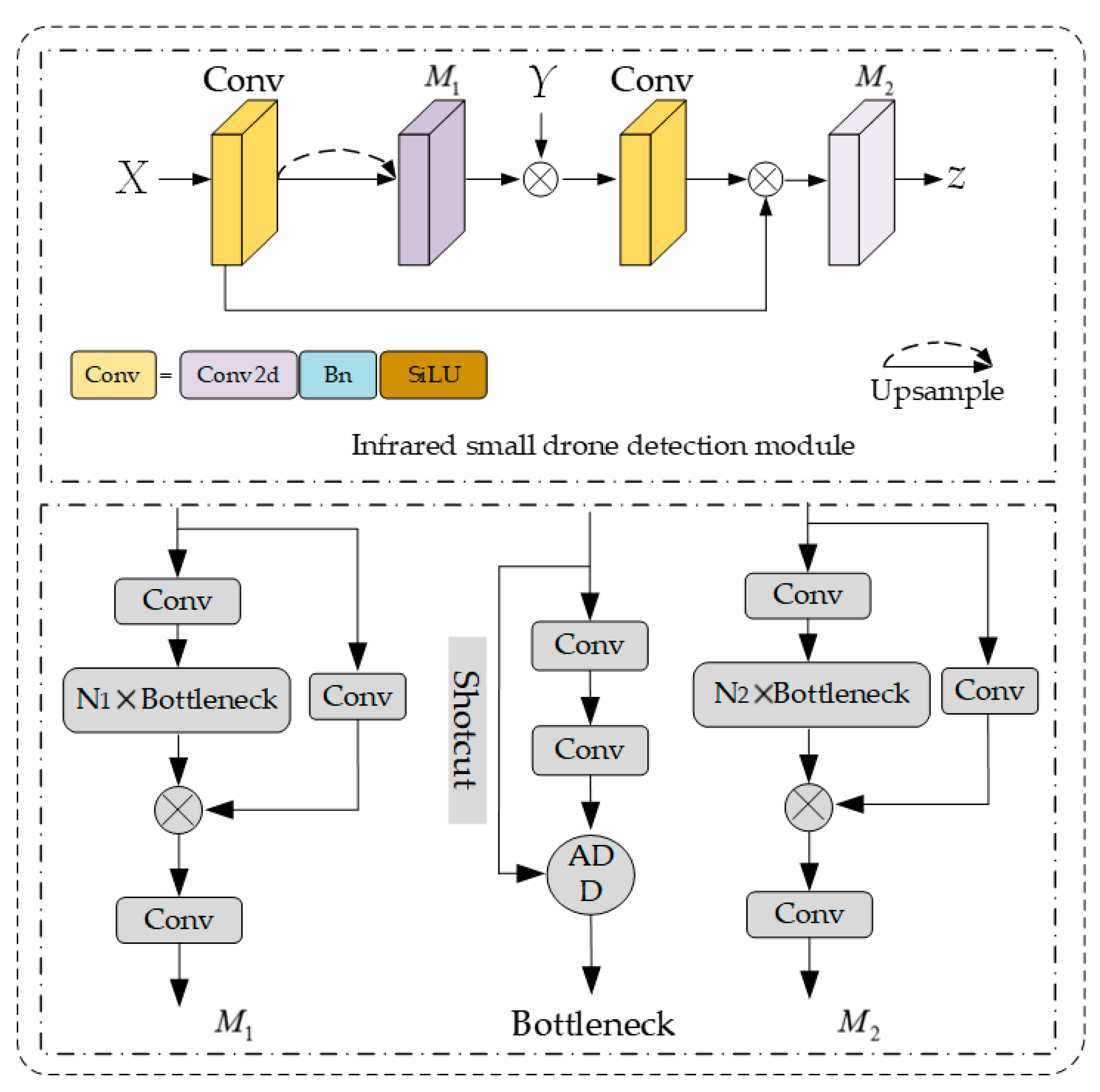
We added an infrared small target detection module (IRSTDM) to effectively realize the extraction and retention of infrared small target information based on the current advanced segmentation detector YOLOv5.
- (2)
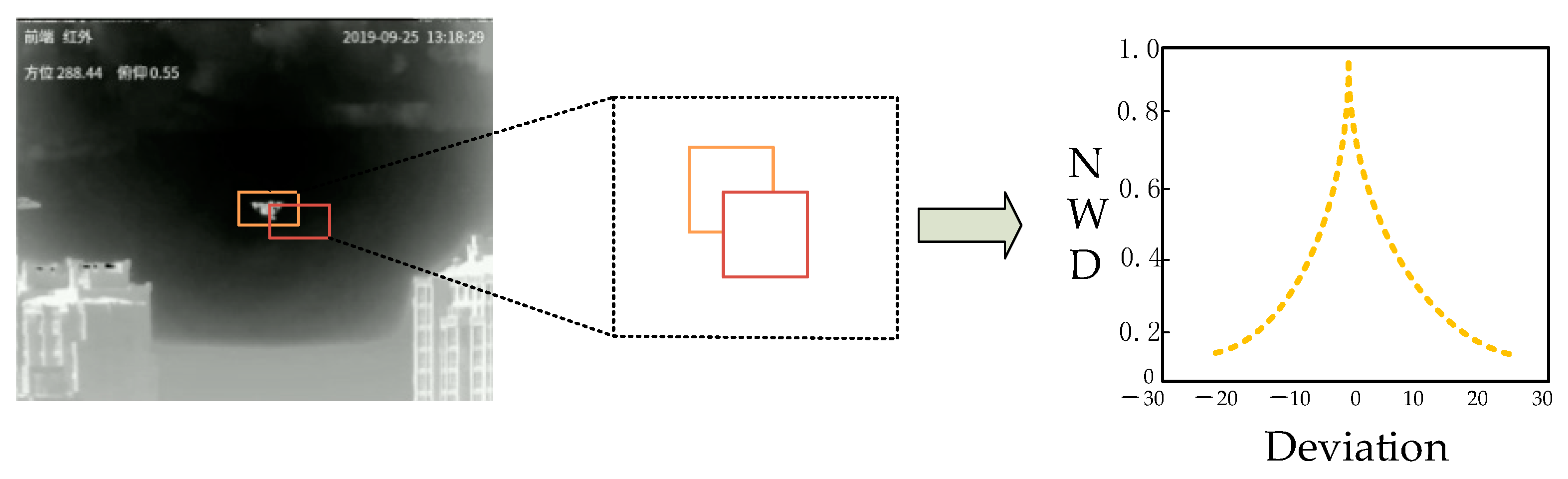
We introduced normalized Wasserstein distance (NWD) to optimize the boundary frame loss function, aiming to solve the problem that the calculated loss function based on the IOU is sensitive to the position of small targets.
- (3)
We built and published a new SIDD dataset, carried out pixel-level annotation on infrared drone images in the dataset and published all masks used for segmentation.
- (4)
We conducted a large number of experiments between the proposed IRSDD-YOLOv5 and eight mainstream segmentation detection methods in the SIDD dataset and verified that the proposed method is superior to the most advanced method.
The rest of this article is as follows. In
Section 2, we introduce the construction of the data set and describe in detail the IRSDD-YOLOv5 structure and improved methods. In
Section 3, we introduce the details of the experiment and analyze the obtained results, describing prospective work for future research. We summarize the entire research work in
Section 4.
3. Results and Discussion
In this section, we introduce qualitative and quantitative evaluations of the proposed method using a self-made single-frame infrared small target drone dataset (SIDD) and analyze the detection results. Firstly,
Section 3.1 describes the evaluation indexes of algorithm performance, and
Section 3.2 describes the details of the computer hardware configuration and experiment implementation. Subsequently, in
Section 3.3, qualitative and quantitative comparisons are made between IRSDD-YOLOv5 and the current most advanced instance segmentation methods, and the reasons for the different accuracies of drone detection achieved in different scenarios are analyzed. We present detailed results of the ablation study in
Section 3.4. Finally, in
Section 3.5, we present certain expectations for future research work based on current drone prevention and control technologies.
3.1. Evaluation Metrics
We consider drone detection a pixel-level instance segmentation task. Therefore, we compare the performances of different algorithms using classical instance segmentation evaluation metrics to assess the abilities of different algorithms to accurately localize and characterize the shape of small infrared targets to ensure that the network detects the target and ensures as few false positives as possible.
- (1)
Average precision (AP): The main algorithm evaluation metrics include , and . is the average value for an IoU of {0.5, 0.55, ----, 0.95}, and AP50 is the value taken for an IoU threshold of 0.5. is the AP value for small targets (less than 32 × 32 pixel values).
- (2)
Parameters (Para): The number of parameters refers to the value of the parameters included in the model. Each number corresponding to the weight matrix in the convolution and the fully connected layers used in the model is part of the number of parameters. The number of parameters is the key to the machine learning algorithm. The size of the model parameters reflects the complexity of the model to some extent.
- (3)
Frames per second (FPS): The higher the FPS value, the better is the real-time processing ability of the model when running the detection algorithm under the same hardware conditions. FPS = 1/latency, where latency is the time taken by the network to predict an image.
3.2. Implementation Details
We used PyTorch 1.8 and TorchVision 0.9 to implement the proposed model on a computer with a single GPU. The computer’s processor was the AMD Ryzen 7 5800H, the GPU was an RTX3060, the initial learning rate of the network was set to 0.0025, the weight attenuation was set to 0.005, the batch size was set to 2 and an AdaGrad training optimizer was used. All images were adjusted to 640 × 640 pixels before being fed into the network and were normalized to speed up network convergence. All CNN-based instance segmentation models were trained on SIDD datasets for 50 cycles.
3.3. Comparison with the Latest Methods
To verify the superiority of IRSDD-YOLOv5, we compared it with several state-of-the-art methods: a top-down meets bottom-up segmentation network (Blendmask) [
9], high-performance instance segmentation using only the box’s annotation (BoxInst) [
10], a segmentation network using dynamic mask headers (CondInst) [
11], Yolact++ [
12], a segmentation network with a double-branch output generation mask (Solov2) [
13], the generation of a high-quality segmentation mask network for each target instance (Mask-Rcnn) [
14] and the You Only Lock Once series (Yolov5 and Yolov7) [
15]. Traditional methods (top-hat filtering and infrared patch-image modeling) were not considered due to their inability to be trained by the dataset and their poor performance [
1,
2]. To ensure the completeness of the experiments, we compared quantitatively and qualitatively the detection results of different scenes in the SIDD dataset.
3.3.1. Quantitative Results
Table 1,
Table 2,
Table 3 and
Table 4 lists the quantization results of IRSDD-YOLOv5 and other advanced segmentation detection methods in different scenarios of SIDD dataset.
represents the detection accuracy, para(M) represents the complexity of each different model and the FPS calculation value describes the real-time computation of each of the different models. In the tables, the best results for each column are highlighted in orange bold, the second best in blue bold and the third best in green bold. The -- in each column represents a zero result or a null output for an indicator of the algorithm. The detection results of our proposed method in different scenes from the SIDD dataset are highlighted with grey shading. From
Table 1,
Table 2,
Table 3 and
Table 4, it can be seen that IRSDD-YOLOv5 obtained excellent detection results in different scenes from the SIDD dataset, significantly improving the accuracy of detecting an infrared small drone.
As1 shown in
Table 1 and
Table 2, the
and
values of IRSDD-YOLOv5 in urban scenes reached 47.3% and 93.9%, respectively, and the AP50 value is the second highest, only 0.01% lower than that of the first-ranked Blendmask. However, in terms of real-time performance, our algorithm is several orders of magnitude higher than Blendmask, ranking second among all algorithms. The
and
measurements of IRSDD-YOLOv5 in mountain scenarios reached 27.7% and 79.8%, respectively. Compared with other algorithms,
ranked first and reached a peak value of 79.8%, 3.8% higher than YOLOv5. However, in the process of training data on the mountain scene, the loss function value of the SOLOv2 algorithm did not converge because the background in the mountain scene is relatively complex. Therefore, this algorithm provides no result for the mountain scene.
As shown in
Table 3 and
Table 4, in the sea surface scenario, the
and
values of IRSDD-YOLOv5 reached 37.5% and 93.4%, respectively. The
value of IRSDD-YOLOv5 in the sea surface scenario reached 93.4%, ranking the first among all algorithms and 4% higher than the
value of YOLOv5. Its real-time performance ranked second. In the process of training on the sea surface scene data, the target in the sea surface scene is generally too small. As a result, the value of the loss function of the SOLOv2 algorithm did not converge, and the detection accuracy of BoxInst is close to 0. Therefore, these two algorithms provide no results for the sea surface scene. In the sky scene, due to the simple background, most detection methods achieved excellent detection results. However, the IRSDD-YOLOv5 proposed by us demonstrated faster real-time performance and fewer parameters, ranking second in terms of real-time performance.
In general, we adopted IRSDD-YOLOv5 by adding a small target detection layer and introducing the NWD to optimize the boundary frame loss function, which is improved in all scenarios when compared with YOLOv5. Due to the addition of the small target detection layer, the network complexity of IRSDD-YOLOv5 is increased. Compared with YOLOv5, the number of parameters is slightly increased, and the real-time performance is somewhat decreased. However, under the condition of obtaining the same accuracy, compared with other mainstream segmentation algorithms, the IRSDD-YOLOv5 algorithm proposed by us demonstrates greater real-time performance and detection accuracy. It is worth noting that the real-time performance of two-stage network-based methods (such as Mask-Rcnn) is poor, less than 5 FPS/s, because a two-stage algorithm usually first uses a selective search algorithm to locate the candidate regions in the image and then uses a classifier to classify each candidate region. These two steps require a large amount of computing resources, so the efficiency of a two-stage algorithm is relatively low.
3.3.2. Qualitative Results
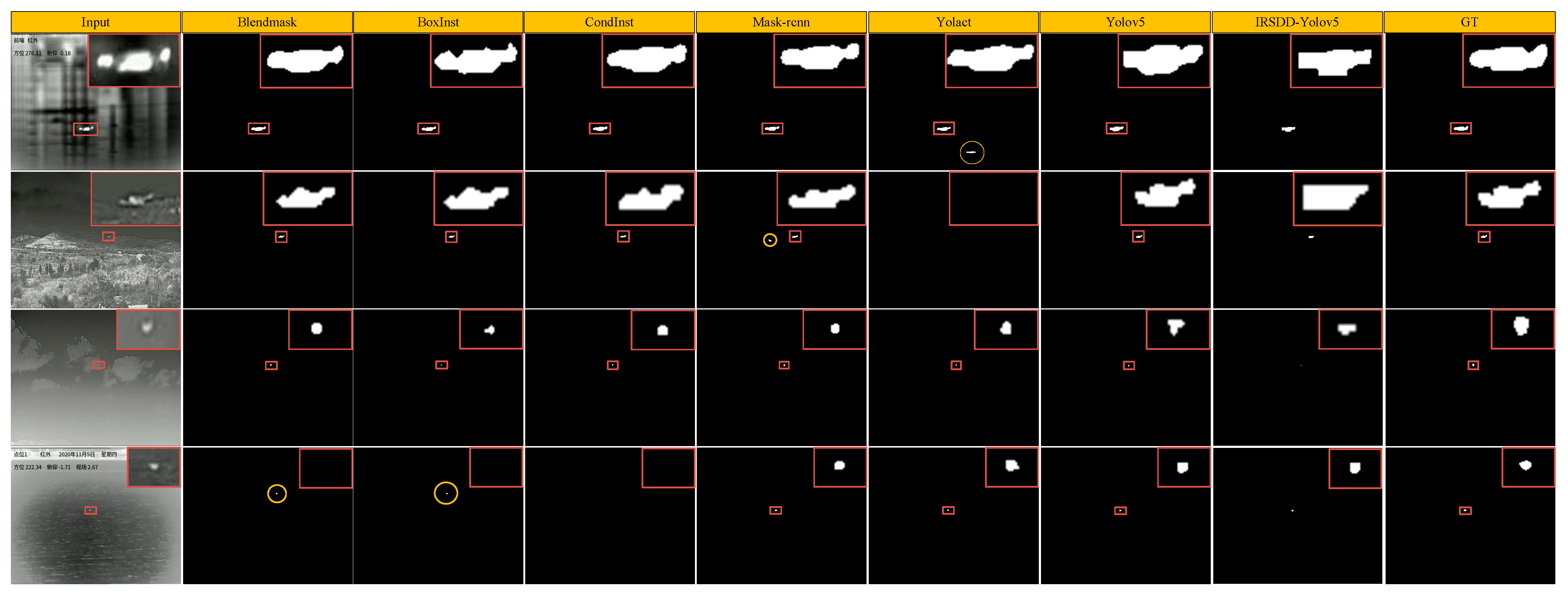
Figure 8 shows the qualitative results obtained using the proposed IRSDD-YOLOv5 algorithm and other methods in four scenes with different backgrounds on the SIDD dataset. In the sea scenario, Blendmask and BoxInst have missed and false detections for the target, CondInst has a missed detection for the target; in the mountain scenario, Mask-Rcnn has a false detection, Yolact++ has a missed detection for the target. It is worth noting that the segmentation results of IRSDD-YOLOv5 have no errors, which indicates that it shows good detection performance for small targets in complex backgrounds (such as mountains and the sea surface).
Figure 8 shows the segmentation results of IRSDD-YOLOv5 and other methods in four scenarios with different backgrounds on the SIDD dataset. As the detected target was too small, we kept the target mask areas of the segmentation results in the figure, and the background parts are represented in black area so that the instance segmentation results can be more clearly displayed. In the mountain scene, Mask-Rcnn misdetected the target, while Yolact++ failed to detect the target. In the sea surface scene, Blendmask and BoxInst have an omission and a false detection for the target, while CondInst has an omission for the target. It is worth noting that the segmentation result of IRSDD-YOLOv5 has no error, which indicates that it has good detection performance for small targets in complex background (such as mountains and the sea surface) and is more robust to these scenario changes.
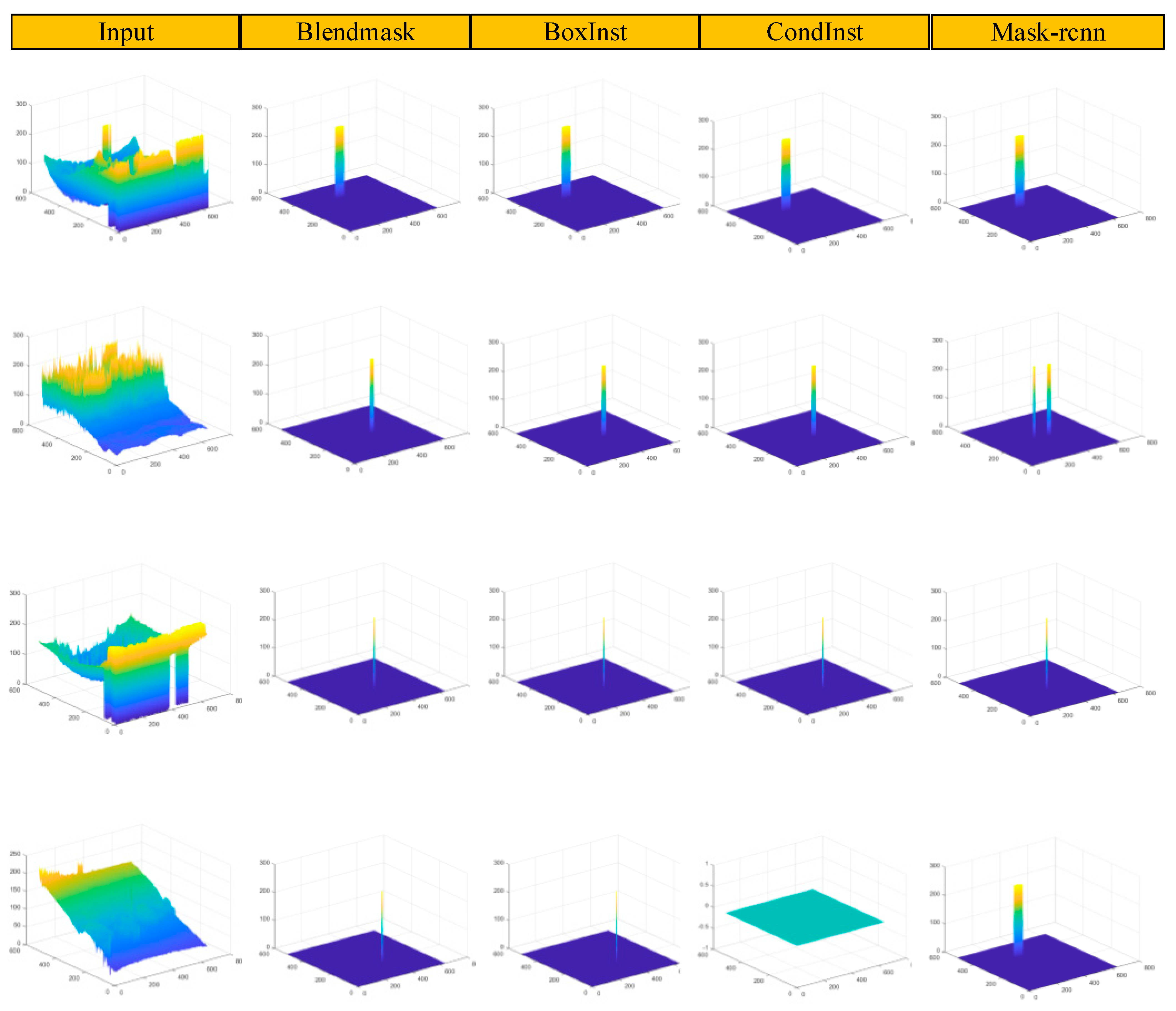
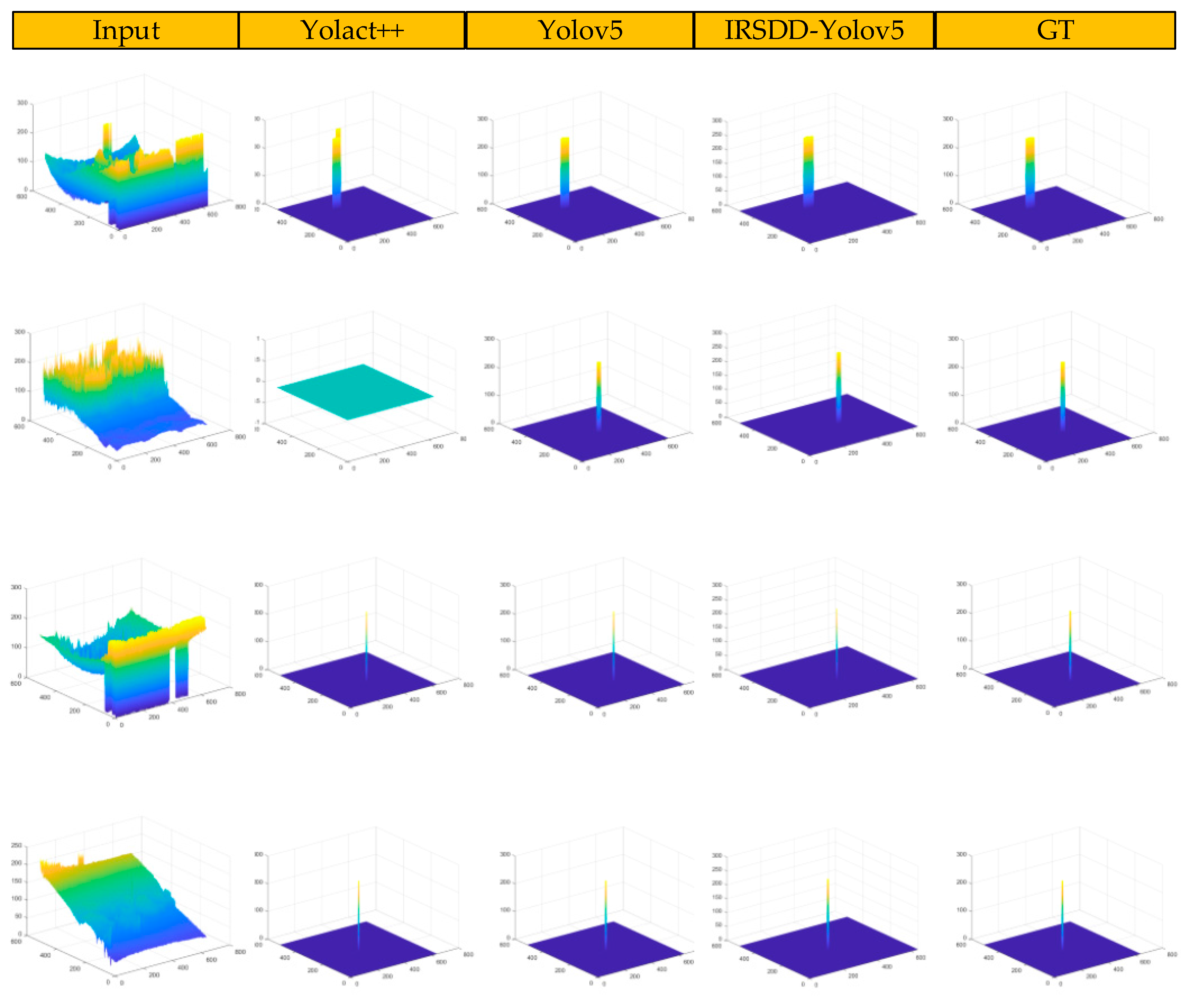
Figure 9 and
Figure 10 show the three-dimensional visualization detection results of different detection methods in different scenes in the SIDD dataset, with the images missed by this algorithm containing a blue plane. It can be seen from the synthesis of
Figure 9 and
Figure 10 that the scale of the drone in the urban scene is large, while that of the drone in the sea scene is the smallest. For targets with relatively large scales, although the current mainstream segmentation methods have achieved good detection performance, there are still false detections for small-scale targets. Because there’s no false detections, YOLOv5 was superior to the other segmentation methods in terms of its detection accuracy, but IRSDD-YOLOv5 obtained a position distribution more consistent with the real region of the target, and its detection results were more accurate.
In summary, the qualitative and quantitative results show that the scales of the drone targets in the SIDD datasets vary greatly, the backgrounds are complex, the shapes and sizes of targets vary and many targets have unclear boundaries. However, IRSDD-YOLOv5 can obtain a higher detection accuracy with a lower parameter number and a higher real-time performance and can accurately detect targets in different scenarios and different scales, indicating that the detection performance of IRSDD-YOLOv5 is robust and that our algorithm can more accurately detect complex scenarios and multi-scale changing targets. Our proposed method of adding a small target detection layer and improving the loss function not only obtains clear target boundary information but also maintains and integrates sufficient infrared drone target image context information so that IRSDD-YOLOv5 has excellent performance.
3.3.3. Analysis of the Reasons for Detection Accuracy
Due to the variability in the detection accuracy in different scenes, we quantitatively and qualitatively analyzed the relationships between the drone targets and backgrounds in different scenes and evaluated the impacts of noise and interference sources on detection accuracy in different scenes.
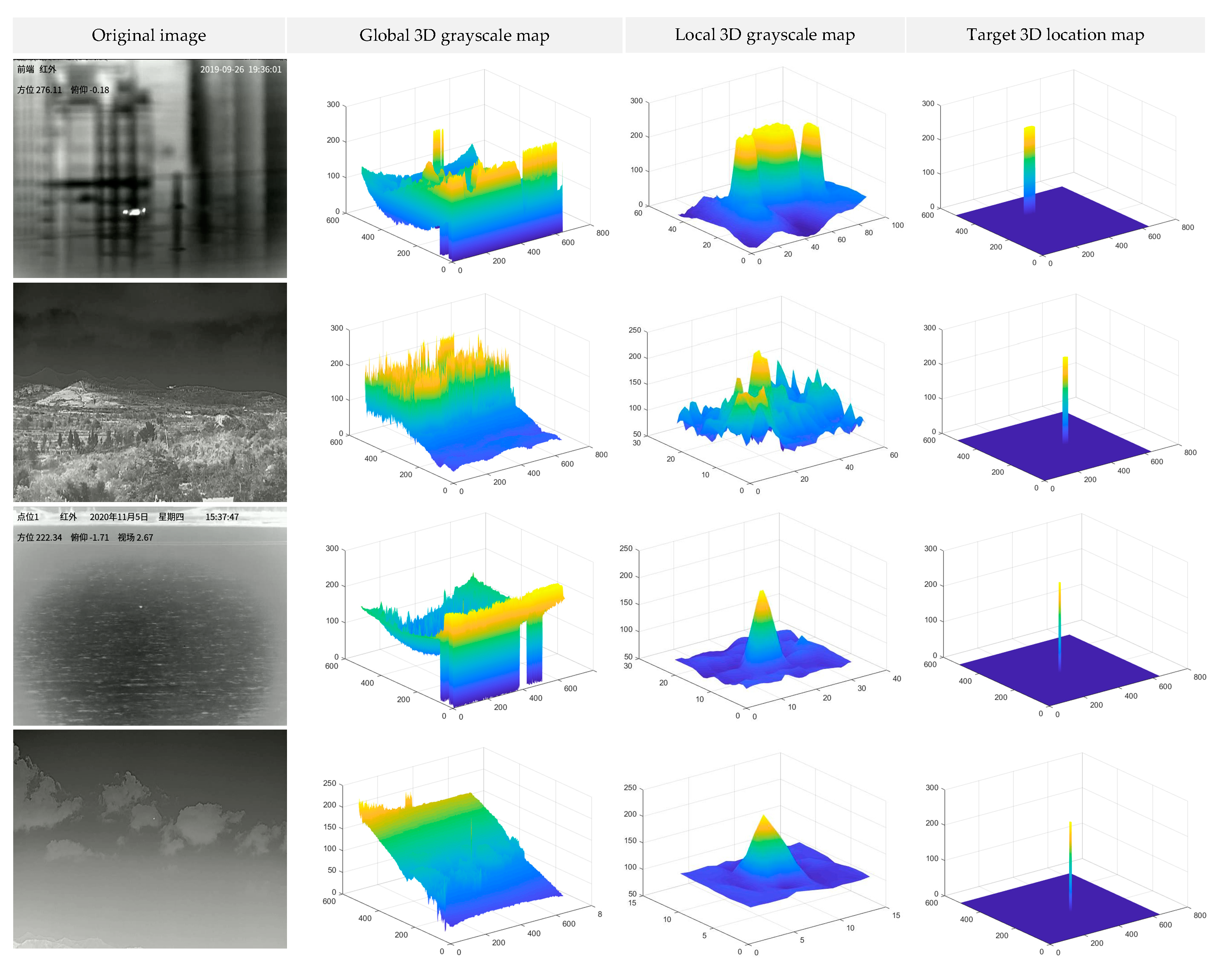
As can be seen from
Table 5, the signal-to-noise ratio (SNR) of the target in the sky scene is the highest, followed by the sea background, while the target SNR in the image with a mountain background is the lowest. As can be seen from
Figure 6, in the global three-dimensional gray scale image of the sky scene, there is less background clutter in the whole image, and the distinction between the target and the surrounding background is clear, followed by the city. However, in the mountain and sea scenes, the entire images contain significant amounts of clutter noise. In particular, it can be seen from the three-dimensional local gray scale that the drone target boundary is not clear, and there is a large amount of clutter near the target in the mountain scene.
It can also be seen from the combination of
Table 5 and
Figure 11 that drone detection in the mountain background image is the most complex, followed by the sea scene, and it is difficult to distinguish the target from the background. Although there are some complex objects in cities, such as buildings, the clutter noise in the city scene is relatively small. There are mainly clouds in the sky image, but there is almost no clutter. Although the target occupies fewer pixels in the image, it can still have relatively distinguishable features.
From the above analysis results, we know the reasons for the relatively low detection accuracies in the mountain scene and the sea scene. When generating the training data, although the location and area of the target are manually labeled, there will still be some challenges in detection using the current advanced segmentation methods.
3.4. Ablation Studies
In order to demonstrate the effectiveness of the structural design and network module of IRSDD-YOLOv5, different variables were constructed to perform detailed ablation experiments to determine whether the contributions of the different variables were reasonable. In addition, for the validity and reasonableness of the ablation, we selected mountain and sea scenarios for the ablation experiments. The results of the ablation experiments for the different variables are presented in
Table 6 and
Table 7, where the larger the measured values of
,
and
, the better the performance. The best results in each column of
Table 7 are highlighted in bold red font, and the second-best results are highlighted in bold blue font.
- (1)
Ablation study for small target detection module
We set up an ablation module for the cross-layer feature fusion of infrared small targets to explore the effect of information interaction between shallow detail features and deep semantic features. In the ablation study for the infrared small target detection module (IRSTDM), we fixed the β value of the bounding box loss function to 0.5 by adding or not adding the small target detection module to demonstrate the effectiveness of the small target detection module. The results in the table show that the of IRSDD-YOLOv5 in the mountain scenario decreases by 2.5% if the small target detection module is not added. The AP50 in the mountain scenario decreased by 2.5%, The AP50 in the sea scenario decreased by 3.6%. The experimental results show that the key to improving the network’s ability to detect small drones is to maximize the advantages of the small target feature layer.
- (2)
Ablation study for loss functions
We considered the advantages and disadvantages of different loss functions and designed the bounding box loss function as shown in Equation (11) by adjusting the value of β in order to explore the impact of optimizing the loss function by combining the CIOU with the NWD. The results in the table show that at a β value of 0.4, the and measurements of IRSDD-YOLOv5 in the mountain scenario are improved by 1.5% and 3.3%, respectively. The maximum improvement is achieved at a value of β of 0.8, when the AP50 value of IRSDD-YOLOv5 in sea scenes are are improved by 2.2%. The experimental results show that combining the advantages of different loss functions can effectively improve the detection performance of an infrared small target detection network.
3.5. Future Outlook
In this section, we discuss in detail the specific trends in infrared drone detection methods based on practical application requirements. Although our proposed IRSDD-YOLOv5 has made significant progress in drone detection based on single-frame infrared images, there are still two issues that need to be considered in future research.
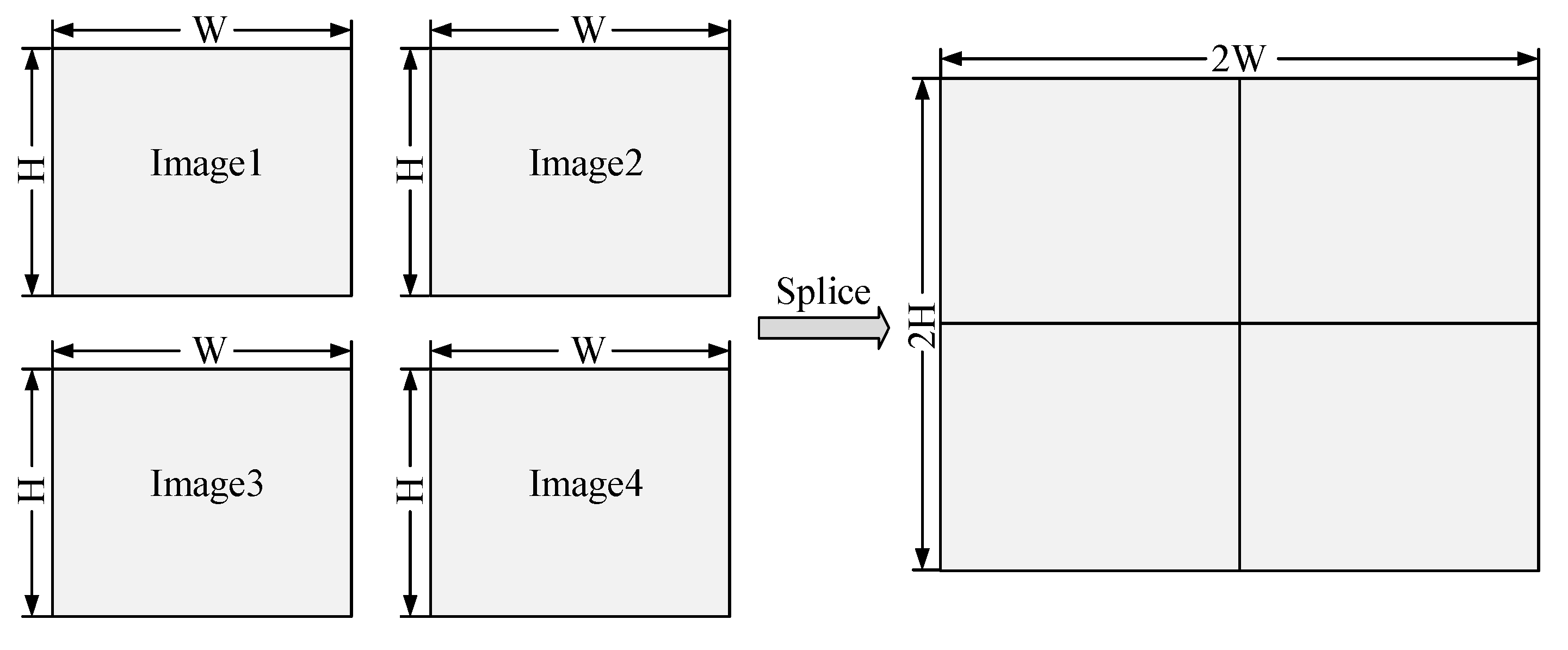
3.5.1. Multiple Infrared Drone Detection
In the SIDD dataset for infrared drone detection proposed in this paper, the image size is 640 × 512 pixels, and there is only one target in each image. To evaluate the performance of the proposed IRSDD-YOLOv5 for the infrared detection of multiple drones, we processed the SIDD dataset by stitching four images into one image containing four targets, and the stitching process is shown in
Figure 12.
3.5.2. Introduction of a Priori Clue Detection
At present, the identification of drone prevention is usually completed via radar-guided photoelectric or infrared cameras. When the radar detects the drone, the radar cannot accurately obtain the direction of the drone and conduct further tracking. At this time, the radar can provide the infrared camera with the general direction of the drone, and as a prior clue, the algorithm searches and detects small areas in the viewing field. The specific process is shown in
Figure 13. Limiting the field of view of an infrared image to the area detected by radar is a common practice in drone detection which helps to improve detection efficiency. Under different experimental conditions, the limit range of an infrared image should be selected according to the actual situation.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}