1. Introduction
Disaster events such as fires, floods, and landslides are characterized by randomness, dynamics, and urgency. In most cases, these disaster events are inevitable. If urgent measures are not taken, it will cause significant economic losses and threaten human life. Therefore, how to reduce the losses caused by disaster events is the key issue in emergency rescue [
1]. With the advancement of science and technology, drones can complete complex tasks such as three-dimensional (3D) map reconstruction [
2], emergency mapping [
3], and environmental assessment [
4]. Compared with traditional disaster rescue applications [
5], multi-drone-based disaster rescue schemes can use drones to achieve damage assessment [
6], material delivery [
7], etc. In the context of disaster rescue, it is challenging for rescuers to promptly reach the affected area due to the complex terrain, obstructions from mountains and rivers, road collapse, and other factors. At this time, due to the characteristics of drones, their mission planning is particularly important [
8,
9]. Therefore, drones have emerged as pioneers in disaster rescue missions, swiftly reaching disaster areas, and reducing the harm caused by disasters to the public [
10]. There are many factors affecting drone disaster rescue, including the complexity of the mission itself, environmental factors [
11] (such as terrain obstacles, weather conditions, or electromagnetic interference), and drone performance factors [
12] (such as maximum load, energy consumption, or maximum flight distance). How to allocate disaster rescue missions to multiple drones reasonably and how to plan the flight path of drones to make them perform disaster rescue missions optimally and safely are the focus of current research.
Over the past few decades, various methods have been developed to solve mission assignments and path planning [
13,
14,
15]. Existing mission assignment methods are divided into two categories: traditional mathematical programming and heuristic algorithms. Traditional mathematical programming methods consider constraints and resource availability to address optimal mission assignments, including enumeration algorithms [
16] and dynamic programming [
17]. Although these methods have the advantages of computational efficiency and are simple to implement, they oversimplify the drone model and can only be applied to simple mission scenarios. Heuristic algorithms iteratively optimize mission assignment schemes through strategies based on experience or rules, including genetic algorithm (GA) [
18], evolutionary algorithm (EA) [
19], tabu search (TS) algorithm [
20], simulated annealing (SA) algorithm [
21], etc. Path planning methods are divided into five categories: graph-based methods accomplish path planning by constructing a robust path graph, such as the Voronoi diagram method [
22]. Random sampling search algorithms generate a path by iteratively sampling points between the start and end points and connecting them based on various constraints, such as the rapidly-exploring random tree (RRT) [
23,
24] and probabilistic roadmap (PRM) [
25]. Node-based optimal search algorithms construct a node topology to represent the path and employ heuristic functions to facilitate efficient path searching, such as the Dijkstra algorithm [
26], the A-star (A*) algorithm [
27], and the harmony search (HS) algorithm [
28]. The artificial potential field method [
29,
30] realizes path planning by constructing gravitational fields and repulsive fields to simulate the interaction forces between objects. Additionally, the bionic evolutionary algorithms optimize path planning solutions through the simulation of biological evolution processes, such as the particle swarm optimization (PSO) algorithm [
31,
32] and the ant colony optimization (ACO) algorithm [
33,
34].
Since mission planning is a NP-hard problem, it can be effectively solved using heuristic algorithms. However, these algorithms have the disadvantages of slow convergence speed and the tendency to fall into local optimums. So far, there is no complete solution to the problem of drone mission planning. Thus, the exploration of alternative and more efficacious remedies becomes indispensable. In [
35], the GA was employed to achieve a multi-drone cooperative reconnaissance mission. In [
36], the mission planning model was established according to the mission clustering of drones, and a mission assignment approach using the K-means clustering method of an improved simulated annealing algorithm was proposed. In [
37], a hierarchical mission assignment method was developed that decomposed the primitive problem into multiple subproblems, then used mixed integer programming and ACO to solve these sub-problems. In [
38], a hybrid algorithm based on PSO and the metropolis criterion was designed to reduce the local optimum of PSO. In [
39], a differential evolution algorithm combined with a quantum particle swarm optimization algorithm was introduced for path planning in a drone marine environment. In [
40], a pigeon swarm optimization considering path length, path curvature, and path risk was also created.
Clearly, extensive simulation results have demonstrated that when dealing with the problem of mission planning, the heuristic algorithm still suffers from the issue of premature convergence during the evolutionary process. Although the existing research has improved these algorithms and proposed many approaches with better performance, there are still some shortcomings among them: first, with the combination of algorithms, the calculation becomes more complicated. Second, global and local optimization abilities are two important factors to be considered in evaluating an algorithm [
41], and it is difficult to maintain an effective balance between them. Third, most studies only consider two-dimensional environments, and the flight environment is too simple, which makes it difficult to apply the research results to actual flight. Therefore, this paper improves the GA and PSO and applies the improved algorithm to the mission planning of multiple drones in complex three-dimensional disaster rescue environments.
This paper presents a mission assignment and path planning system for multiple drones for disaster rescue applications. Additionally, it is mainly to coordinate and control multiple drones for efficient material distribution within a 3D disaster area. First, an original digital terrain and three common threat sources [
42] for disaster rescue environments are designed, including the mountain, transmission tower, and severe weather. Then, a cost–revenue function considering drone performance, mission point requirements, elevation cost, and threat source factors is proposed. When using the AGA for mission assignment, the improved circle algorithm, adaptive crossover rate and mutation rate, and a strategy that uses both roulette and elite retention methods are used to increase the properties of the AGA. Finally, based on the sine–cosine function model, a SCPSO is proposed for searching the optimal flight path between adjacent task points. The inertia and acceleration coefficients of linear weights are designed to further maintain an effective balance of SCPSO between global exploration and local development.
The main contributions of this paper include: (1) A modeling method for multi-drone 3D disaster rescue is presented. The original digital terrain is defined. Three threat sources are proposed. A new cost–revenue function is established and formulated as a constrained, multi-objective optimization problem. (2) The AGA and SCPSO algorithms are proposed. A strategy of using both roulette and the elite retention method is proposed, and the capacity of AGA is improved by combining the improved circle algorithm. The inertia and acceleration coefficients of linear weights are designed for SCPSO to increase optimization efficiency. By integrating the mission assignment method with the path planning algorithm, multi-drone mission allocation and path planning in a complex 3D environment can be implemented.
In the following sections, first, the description of the multi-drone disaster rescue problem will be presented in
Section 2. Second, the digital terrain, threat sources, cost–revenue function, AGA, and SCPSO modeling methods are introduced in
Section 3. Third, a series of experiments and simulations under complex 3D terrain are carried out and discussed in
Section 4. Finally, the conclusion is given in
Section 5.
2. Problem Descriptions
The method proposed in this paper is utilized to deploy multiple drones that originate from a base and perform disaster rescue missions at different target locations within the disaster area. The primary aim of these missions is to efficiently distribute vital supplies to the disaster-stricken region.
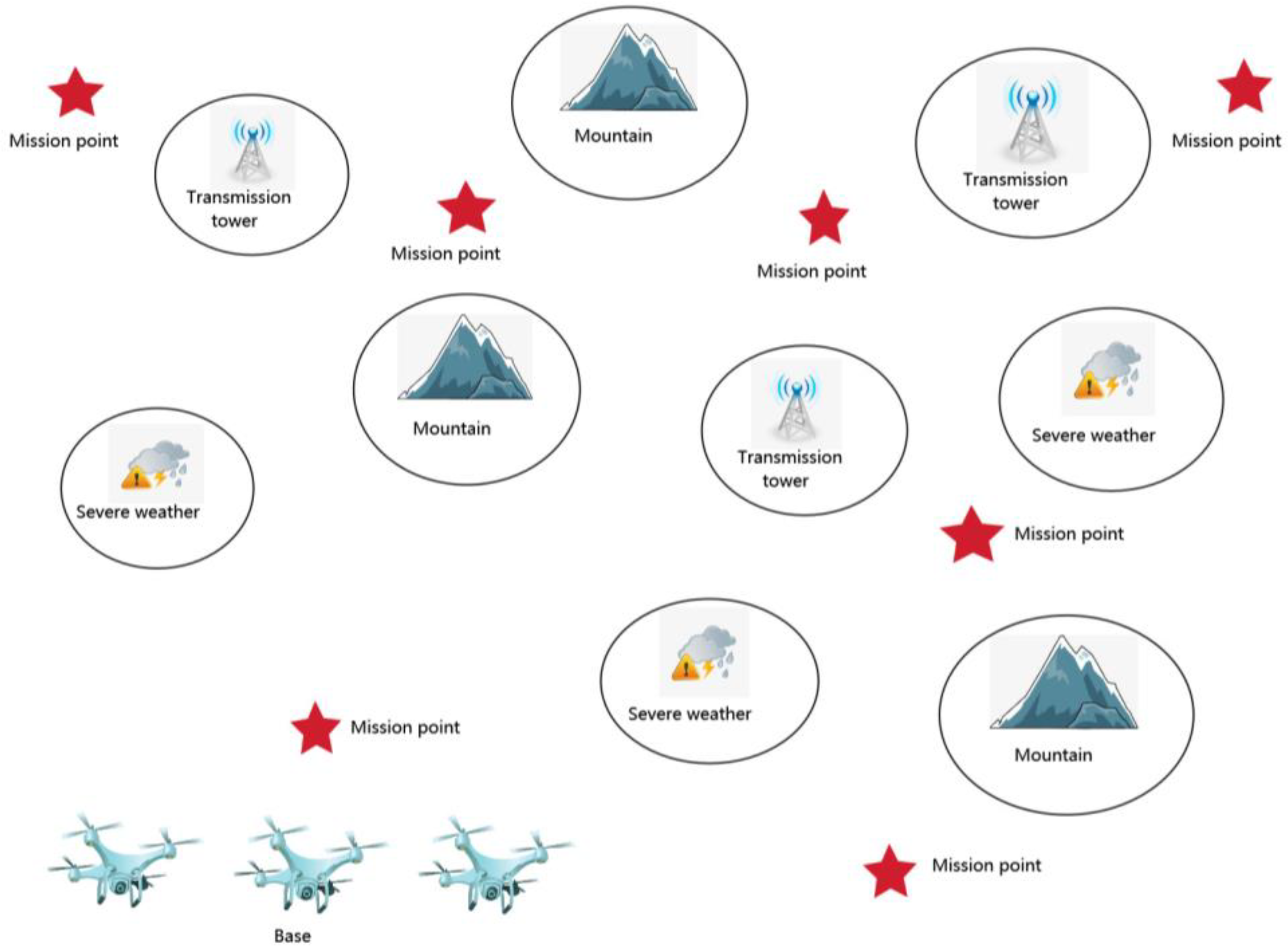
Figure 1 shows a sketch of multi-drone disaster relief. Multiple mission points are situated in different locations within the disaster area, each requiring a specific quantity of rescue materials. Commencing from a designated starting point, multiple drones initiate the mission, transporting the materials to each mission point in the assigned order, and subsequently returning. The flight of the drone is affected by many factors, such as the mountains, transmitting towers, and severe weather. The mountain may affect the flight safety of drones. The transmitting tower may affect the communication system of the drone. Moreover, the severe weather may change the original flight path of the drone. In addition, flight distance and load will also affect the assignment of the entire mission.
In the aforementioned application scenario, multiple drones traverse
N mission nodes in a specific sequence, starting from the base. Once the mission is accomplished, all drones return to the base. Assuming that
N mission points are {
x1,
x2, …,
xN}, the number of drones is
M. Since the drone needs to return to the base after the mission is completed, we need to copy the base node as an
M virtual base node. This enables the decomposition of the multi-path generation problem into one-way travel for a group of drones. This approach ensures that the flight path from the first drone to the last drone is connected from beginning to end, forming a single loop, as shown in
Figure 2. Among them,
O is the base node, and
O1,
O2, and
O3 are the virtual base nodes.
If the mission of drone
u includes the flight track from the mission point
xi to the mission point
xj, the decision variable is defined as
= 1, otherwise
= 0. The total flight distance of multiple drones is expressed as Equation (1). Equations (2) and (3) ensure that each mission point is visited only once during a mission cycle. Equations (4) and (5) specify that each drone can only take off and land at the base. Formula (6) ensures that the total flight displacement of each drone does not exceed its maximum flight displacement constraint. Equation (7) means that the load of each drone does not exceed its maximum load constraint.
where
sij is the displacement between any pairs of target points (
xi,
xj); (
Xi,
Yi,
Zi) and (
Xj,
Yj,
Zj) are the 3D coordinates of mission points
xi and
xj, respectively;
smax means the maximum displacement of drone driving;
qi represents the material demand of mission point
xi; and
qmax means the maximum load of the drone.
4. Results and Discussions
Based on the above model research and algorithm designs, Python programming is used for simulation experiments on our PC (Intel(R) Core(TM) i7-10700K CPU @ 3.80 GHz, 32 GB RAM, NVIDIA GeForce RTX 3090). For the purpose of proving the effectiveness of the presented system and method, first the GA and the AGA are used to evaluate the mission assignment. Then, the evaluation experiments of three-dimensional path planning are carried out, in which PSO and SCPSO are compared. Third, the simulation experiment of a multi-drone disaster rescue system is carried out by combining mission assignment and path planning.
4.1. Comparison of GA and AGA
In this section, GA and AGA algorithms are compared. Mission points are used for gene coding on chromosomes. The initial population size
NAGA of the algorithm is 200, the maximum crossover rate
PC,max, and minimum mutation rate
PC,min are 0.8 and 0.4, and the maximum crossover rate
PM,max, and minimum mutation rate
PM,min are 0.01 and 0.001. The experiment of multi-drone mission assignment is carried out in a 100 × 100 × 100 area. The drone base station coordinate is (2, 35, 1).
Table 1 shows the parameters of each threat source. The experiment of three drones performing 10 mission points is evaluated and tested. The minimum fitness function and the mean fitness function of each generation with the maximum iteration time
TAGA of 100, 200, and 300 are studied by performing 50 mission assignment experiments. Mission execution order, fitness function, and program running time are the main indexes of the mission assignment evaluation experiment. The fitness function is defined in Equation (24), where it is evident that a lower fitness function value indicates a better calculation outcome for the algorithm.
The maximum displacement of the drone is 300, the body weight is 1, and the maximum load is 4. Mission point coordinates and material requirements are shown in
Table 2.
Table 3 presents the comparison results of performance evaluation indexes between GA and AGA. The results indicate that the optimal value (OV), the worst value (WV), and the mean value (MV) of AGA are lower than those of GA except for the running time. Additionally, the lower standard deviation value (SDV) proves that AGA can obtain the optimal assignment stably.
Figure 7 shows the statistical results of the minimum fitness per generation and the mean fitness per generation of GA and AGA with 100, 200, and 300 iterations, respectively. It can be seen from
Figure 7 that the convergence speed and optimal value of AGA are much better than those of GA.
Table 4 gives out the optimal mission execution order comparison result: when the iteration time is small, there are significant differences in the optimal allocation results between GA and AGA. However, when the iteration time is large, the optimal allocation results of GA and AGA become similar. AGA can achieve better results with fewer iterations.
4.2. The Evaluation Experiment of SCPSO
In this section, the evaluation experiment of the 3D path planning algorithm is carried out, and the PSO and SCPSO algorithms are compared. The initial population size (
NSC) of the algorithm is 50. The number of path-control points (
NC) is 5. The maximum inertia weights
wmax and minimum inertia weights
wmin are 0.9 and 0.4, respectively. The maximum individual acceleration coefficients
c1max and minimum individual acceleration coefficients
c1min are 2.5 and 1, respectively. Additionally, the maximum sine and cosine amplitudes
R1max and minimum sine and cosine amplitudes
R1min are 2.25 and 1. The experiment of multi-drone path planning is carried out in a 100 × 100 × 100 area, and the simulation time is 50. The starting point coordinate of the drone is (2, 35, 1), and the end point coordinate is (95, 80, 10). There are three threat sources: mountains, transmission towers, and severe weather. The parameters of each threat source are shown in
Table 1.
Table 5 presents the comparison results of performance evaluation indexes between PSO and SCPSO.
Figure 8,
Figure 9 and
Figure 10 show the 3D path planning examples and statistical results of the minimum fitness and the mean fitness of each generation of PSO and SCPSO when the maximum iteration times
TSC are 100, 200, and 300. The fitness function and program running time are the main results of this experiment. In 3D path planning, the fitness function refers to the distance of drone flight. Therefore, the smaller the fitness function value, the better the calculation effect of the algorithm. All the aforementioned evaluation experiment results demonstrate that SCPSO is capable of achieving a shorter flight path.
4.3. The Disaster Relief Simulation Experiment
This section conducts a multi-drone disaster rescue simulation evaluation experiment. Four algorithms, GA + PSO, GA + SCPSO, AGA + PSO, and AGA + SCPSO, are used for testing. The comprehensive evaluation of the multi-drone disaster rescue simulation evaluation experiment is carried out in a 100 × 100 × 100 area. The experiment of three drones performing 10 missions is evaluated and tested. The drone base station coordinate is (2, 35, 1), the number of path-control points
NC is 2, the iteration times of GA and AGA are 300, the iteration times of PSO and SCPSO are 100, and the time of simulations is 20. The mission point, threat source, and other parameters of the algorithm are the same as those in
Section 4.1 and
Section 4.2.
Table 6 shows the multi-drone optimal mission results of GA and AGA when the maximum iteration time is 300.
Table 7 shows the evaluation results of four methods. It can be seen from
Table 7 that the performance of AGA + SCPSO is the best, i.e., its fitness function is optimal and the path is the shortest.
Figure 11 shows the visualization results of the drone disaster rescue experiment. It can be seen that the path planned by SCPSO is better, that is, its path is shorter and the route is smoother.
4.4. Discussions
After the disaster, due to the barrier of mountains and rivers, it is a challenging task for relief forces to reach the disaster area for the first time. Due to the urgency of disaster rescue, prompt execution of search and rescue operations within a short timeframe is often critical. The drone has the advantages of search and rescue [
46], efficient monitoring [
47], material distribution, and recovery of communication [
48], which can be used for a fast disaster response [
49]. Compared with a single drone, a multi-drone can undertake different rescue missions simultaneously and reduce rescue time. Therefore, it is necessary to study how to reasonably allocate different mission points for drones and plan their flight paths before implementing rescue. To this end, a multi-drone mission planning system and method that comprehensively consider factors such as flight distance, drone performance, threat source factors, and disaster site requirements are proposed in this paper. The research results can provide theoretical support for future disaster relief.
In this paper, three common threat sources in disaster rescue environments are modeled: mountains, transmission towers, and severe weather. Due to the characteristics of mountains, the mountain threat source is simplified by the bi-GMM. In future research, neural networks based on the truncated sign distance function (TSDF) can be used to model real mountain areas [
50], making the model closer to real 3D mountain scenes. Although many anti-interference technologies have been developed to reduce the electromagnetic interference of drones [
51], the signal is susceptible to weather, terrain, and other factors; so it is best to avoid entering the corresponding influence ranges. In the future, the interference of transmission towers and mining areas can also be studied. Modeling severe weather is a complex task due to its complexity and uncertainty and the vulnerability of drones to changes in airflow and pressure. In this paper, to enable fast computation, the range of influence of the severe weather threat source is abstracted using a cylinder. In the future, the difference in the response of drones’ own characteristics to weather phenomena and the temperature model [
52] can be considered.
A cost–revenue function is formulated to facilitate multi-drone disaster relief mission allocation. The cost function represents the cost and risk of the multi-drone rescue process. In addition, due to the influence of weight on overcoming the work conducted by gravity, the order of mission execution is different, and the energy consumption of the drone is also varied. Therefore, the elevation cost is taken into account in the cost function. The revenue function represents the relief value of the task completed by the drone. The cost–revenue function represents the difference between the cost and revenue functions. Therefore, a smaller cost–revenue function indicates a better calculation effect for our model. In this study, the flight distance, flight height, threat source factors, drone performance constraints, and mission point revenue are all considered in the cost–revenue function. In the future, additional aspects can be taken into consideration when designing the cost–revenue function, such as the time required for a drone to perform different missions or the smoothness of the drone’s flight trajectory.
In this paper, AGA and SCPSO are used to assign missions and plan paths for drones, respectively. In order to further verify the effectiveness of AGA, we further supplement the comparative experiments of GA and AGA. In the 100 × 100 × 100 area, the experiment of 5 drones performing 20 missions is evaluated. The maximum displacement of the drone is 400, the body weight is 1, and the maximum load is 5. Mission point coordinates and material requirements are shown in
Table 8. The remaining parameters are the same as those in
Section 4.1. A total of 50 mission assignment experiments are performed.
Table 9 presents a comparison of the performance evaluation indexes between GA and AGA for the corresponding disaster relief mission. It can be seen that in the case of increased task complexity, except for the program running time, the performance of AGA is significantly better than that of GA.
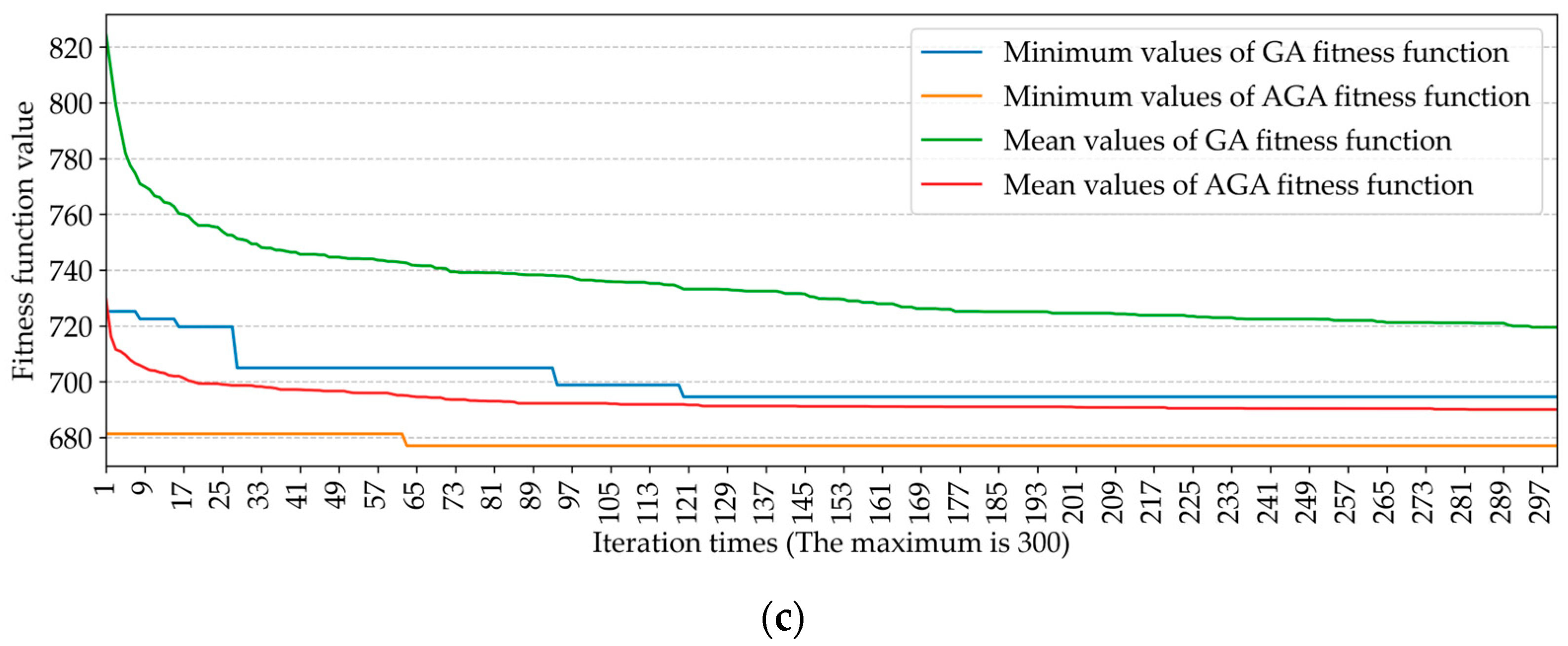
Figure 12 shows the statistical results of the minimum fitness of each generation and the mean fitness of each generation for the corresponding GA and AGA when iteration times are 100, 200, and 300. It can be seen that the convergence speed, optimal value, and average value of AGA are much better than those of GA. Compared with the previous results (see
Section 4.1), it can be seen that the higher the mission complexity, the better the performance of AGA. This means that the performance gap between AGA and GA is larger, and AGA is more suitable for mission assignments with high mission complexity.
Table 10 presents the corresponding optimal mission execution orders for GA and AGA: as task complexity increases, the results show significant differences.
After repeated experiments, it can be found that GA is difficult to obtain optimal mission assignment with high complexity; differently, the AGA proposed in this paper can obtain optimal allocation only with fewer iterations. In order to further verify the effectiveness of SCPSO, we further supplement the comparative experiments of AGA + PSO and AGA + SCPSO under the same simulation experiment of 5 drones performing 20 mission points. The algorithm parameters are the same as those in
Section 4.3. A total of 20 simulation experiments are performed.
Table 11 shows the evaluation indexes of AGA + PSO and AGA + SCPSO. It can be seen that the performance of AGA + SCPSO is better in environments with higher mission complexity, i.e., the path is shorter and the route is smoother. Compared with the previous results in
Section 4.3, it can be seen that SCPSO performs better when the mission complexity increases, and SCPSO is more suitable for path planning problems with high mission complexity.
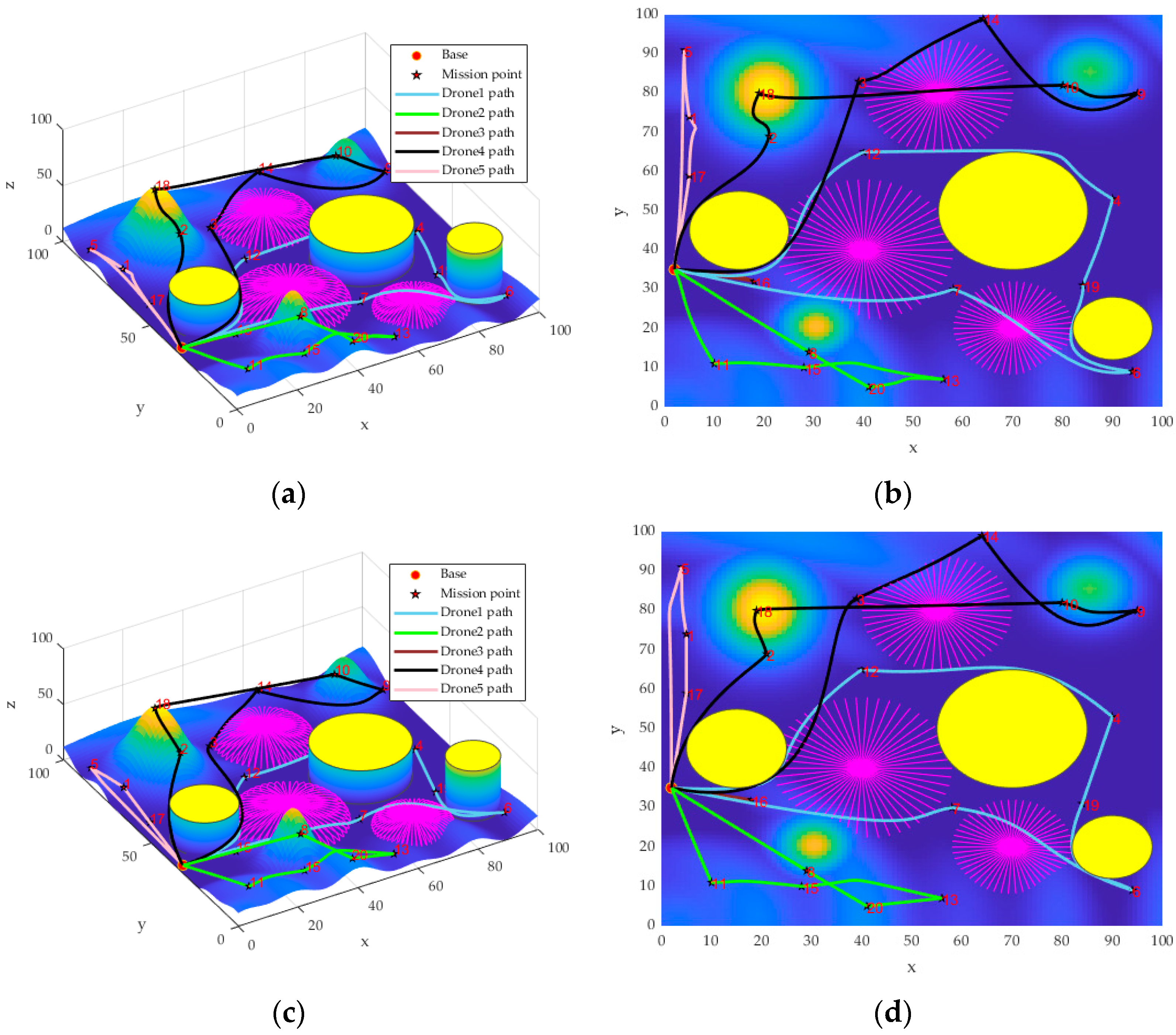
Figure 13 shows the visualization results of the corresponding drone disaster rescue experiment.
The effectiveness of the proposed model is demonstrated in this paper through a series of experiments. The fitness function and processing time are used in the experiment. When the number of missions is small, AGA generally reaches the optimal value within 10 generations, while GA needs hundreds of generations to reach the optimal value, and its optimal value is not as good as the optimal value of AGA. When the number of missions increases, AGA generally reaches the optimal value within 100 generations, while GA will use even 300 generations to reach the optimal value. Although AGA uses more computing resources and takes more computational time, it obviously takes less time if the time to reach the optimal value is discussed instead of the same number of iterations. For PSO and SCPSO, since SCPSO balances the ability of global and local optimizations, its convergence speed and optimal value are better than PSO. Clearly, all of the aforementioned experimental results demonstrate that our proposed method exhibits strong performance.
The method proposed in this paper has at least three advantages. First, the proposed system is designed to address the real-world scenarios of multi-drone disaster relief. The typical threat sources of disaster rescue scenarios, the requirements of disaster areas, and the performance of drones are considered when designing the cost–revenue function. This study can provide a basis for future drone disaster rescue. Second, for the problem of multi-drone disaster rescue, an optimization method with higher calculation accuracy is proposed, and this method is more suitable for optimization problems with high complexity. Third, the model has good scalability. Our model can simulate common disaster rescue scenarios and can be applied to various disaster relief environments with minimal modifications. Despite its advantages, our method also has limitations. For instance, our approach is specifically tailored for scenarios where complete environmental information is available. The presence of partially unknown information in the environment can potentially lead to mission planning failures. Moreover, an excessive amount of information regarding drones and mission points may have a detrimental impact on the real-time performance of the algorithm. These could be addressed in future work.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}