
Development and Field Testing of a Wireless Data Relay System for Amphibious Drones

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
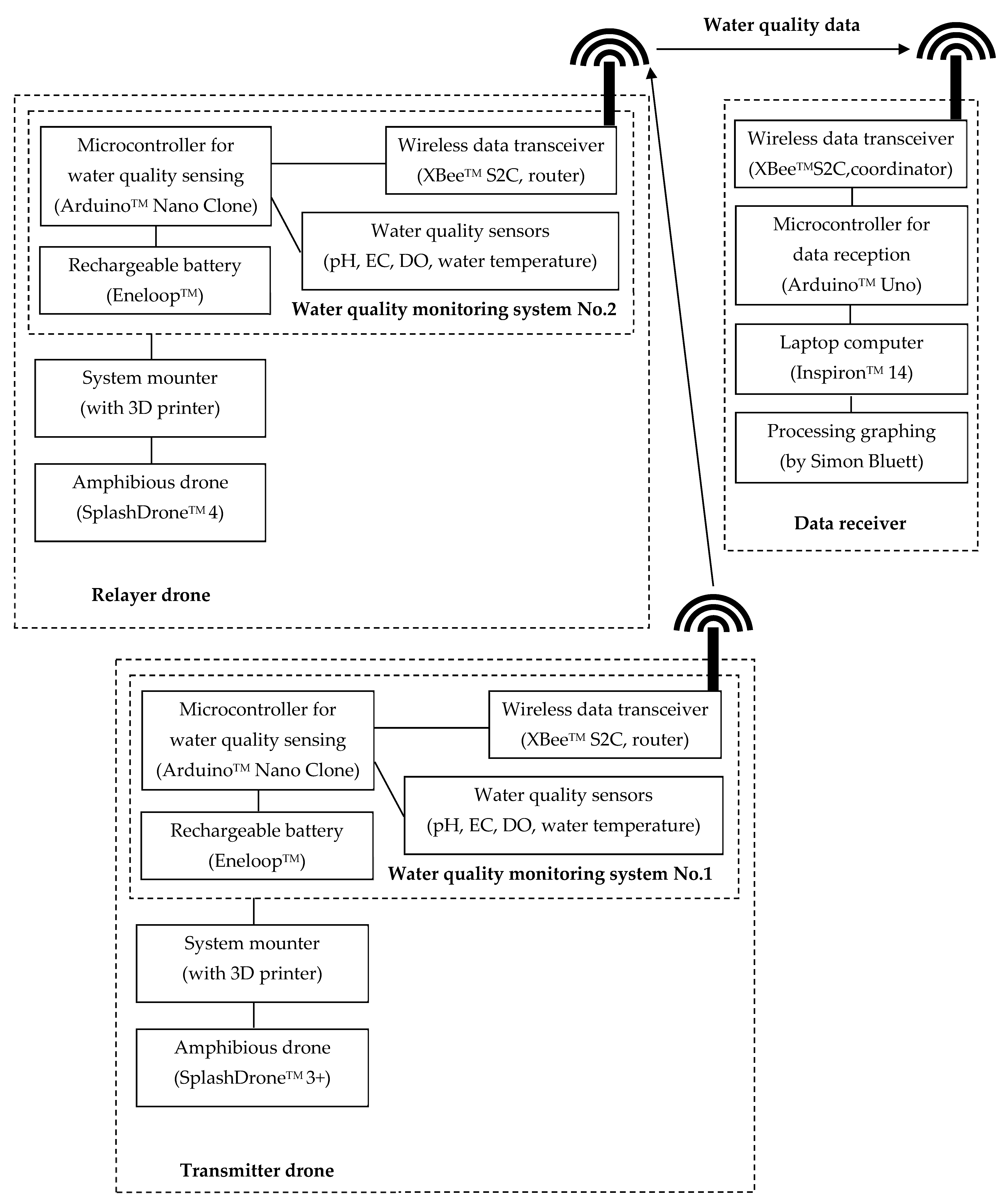
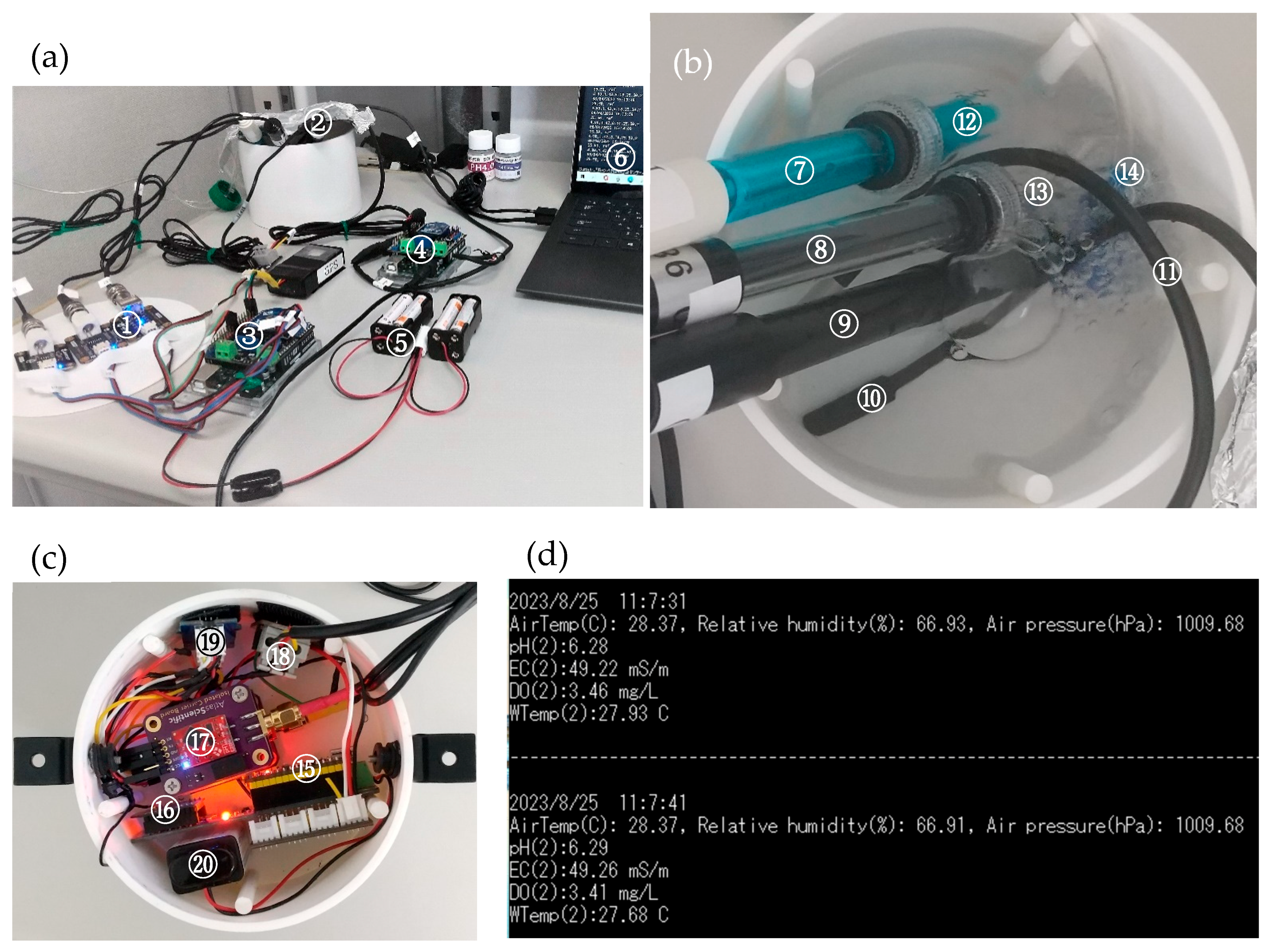
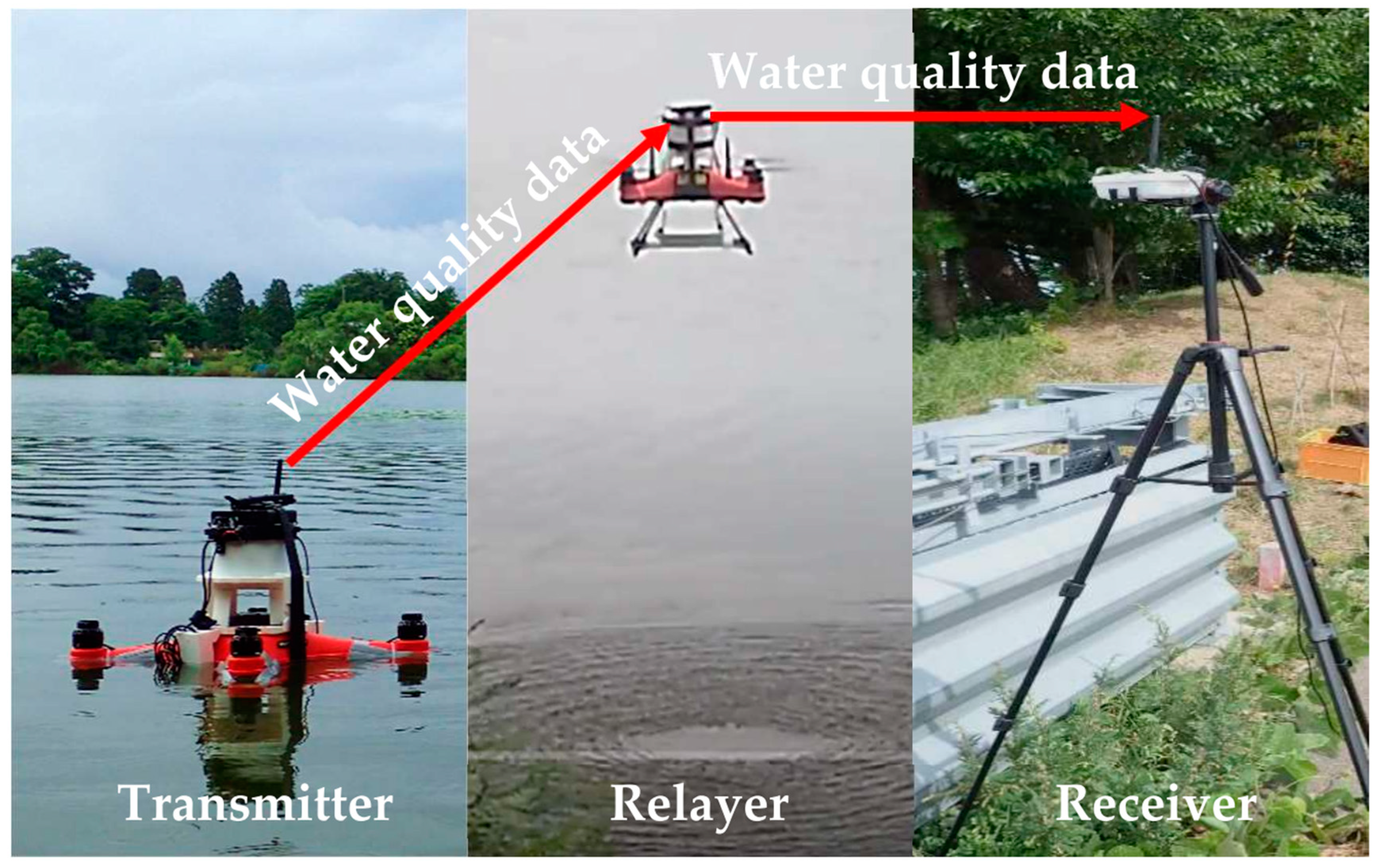
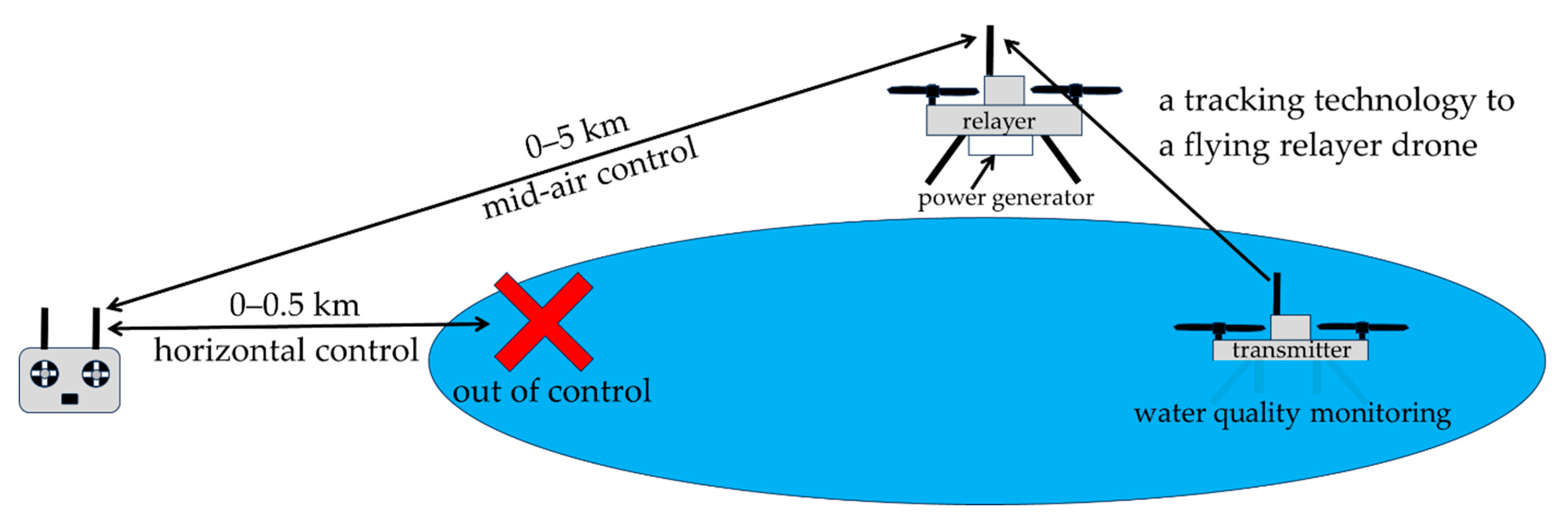
2.1. Water Quality Monitoring System with Amphibious Drones
2.2. Wireless Communication Modules and Configurations
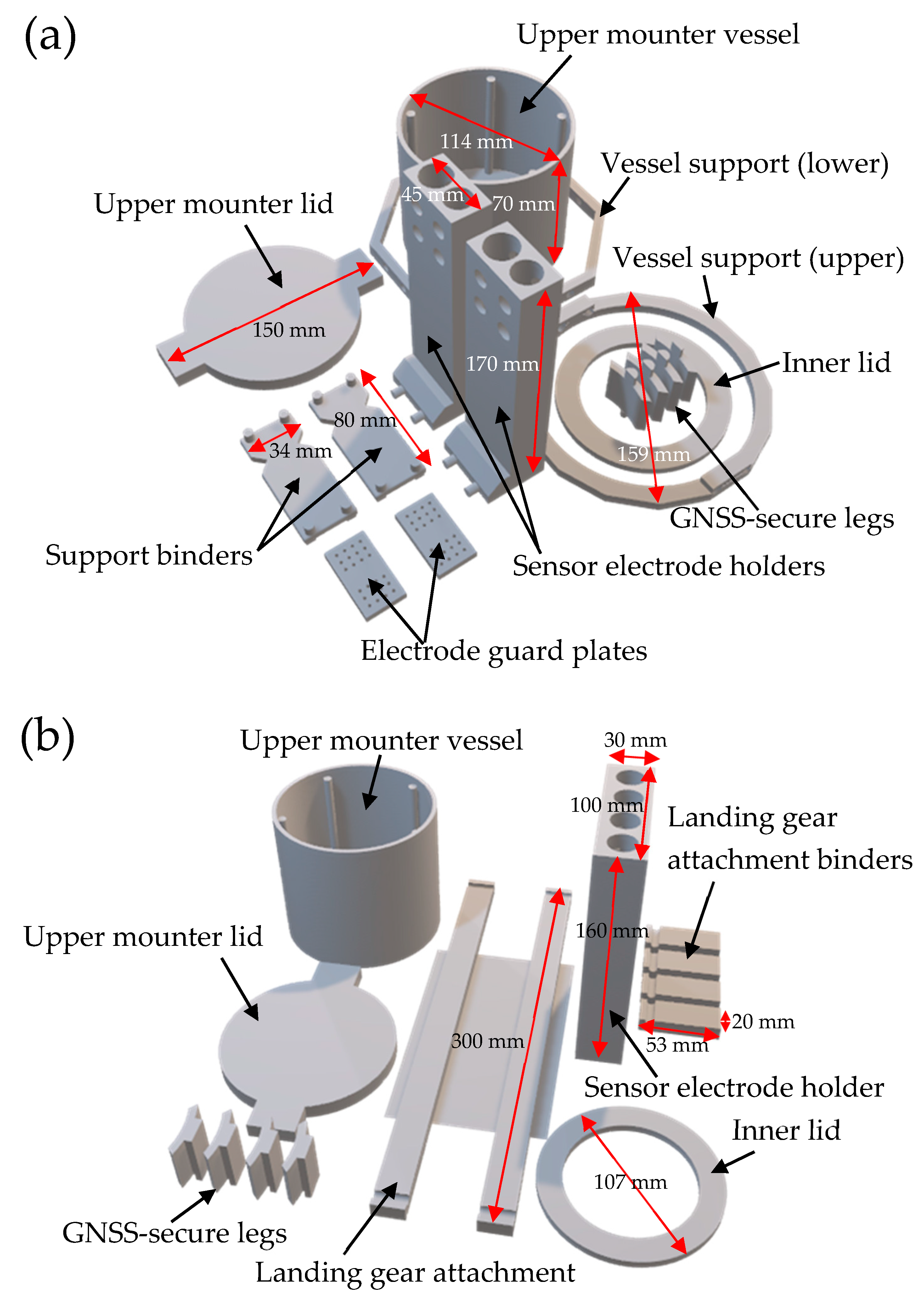
2.3. Drone Mounters for the Water Quality Monitoring System
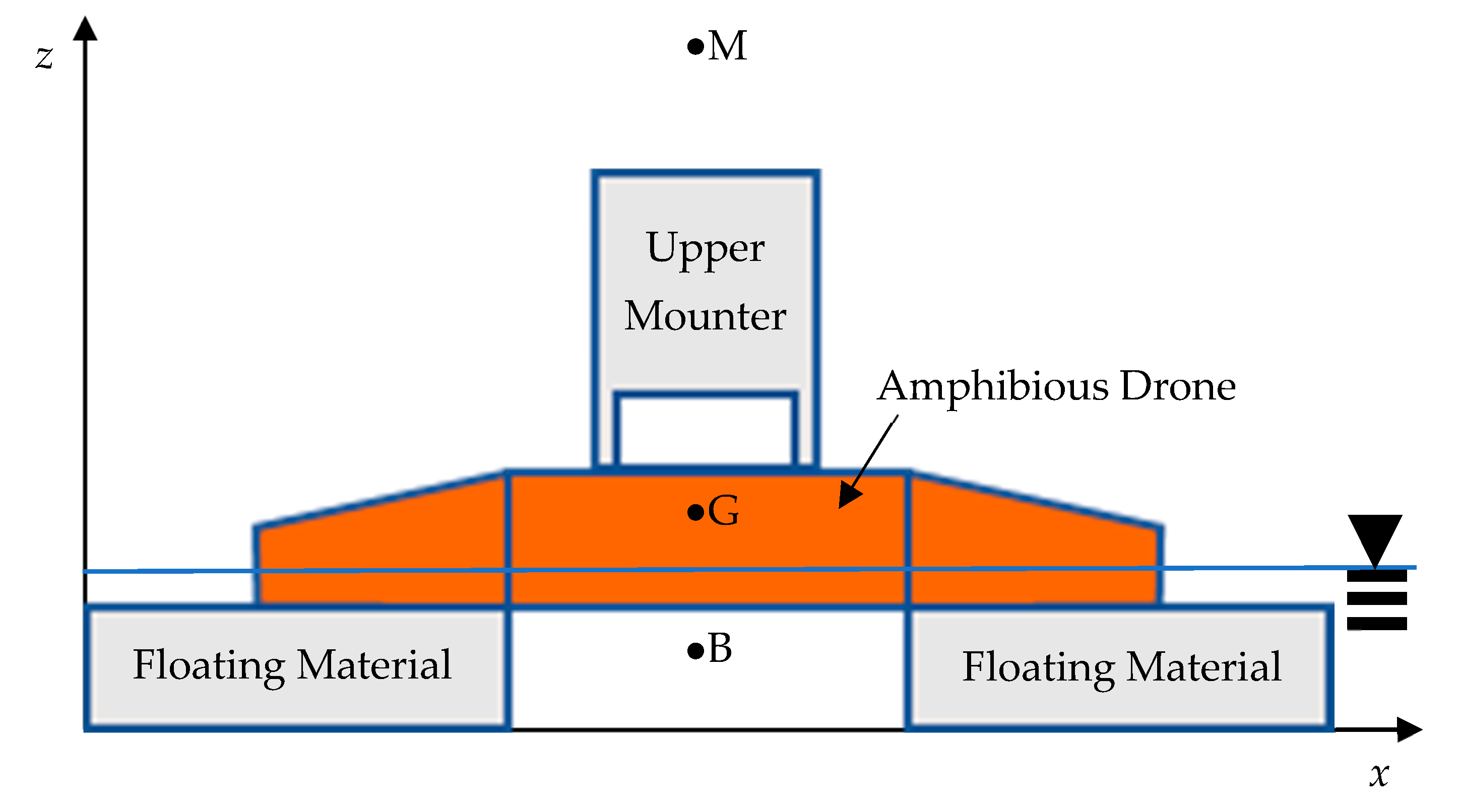
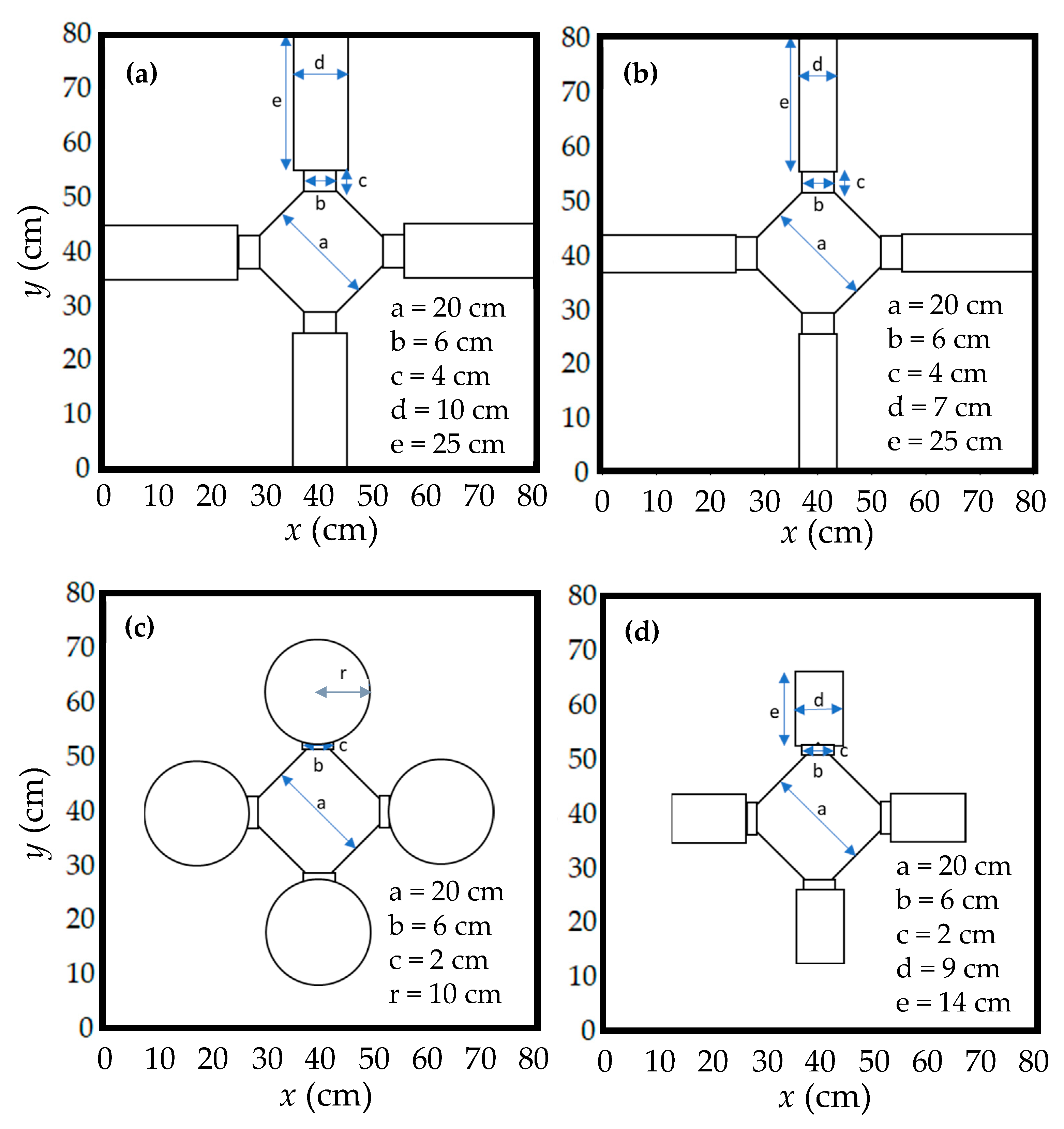
2.4. Preliminary Selection of a Reinforcing Float for the Amphibious Drone System
2.5. System Stability Evaluations
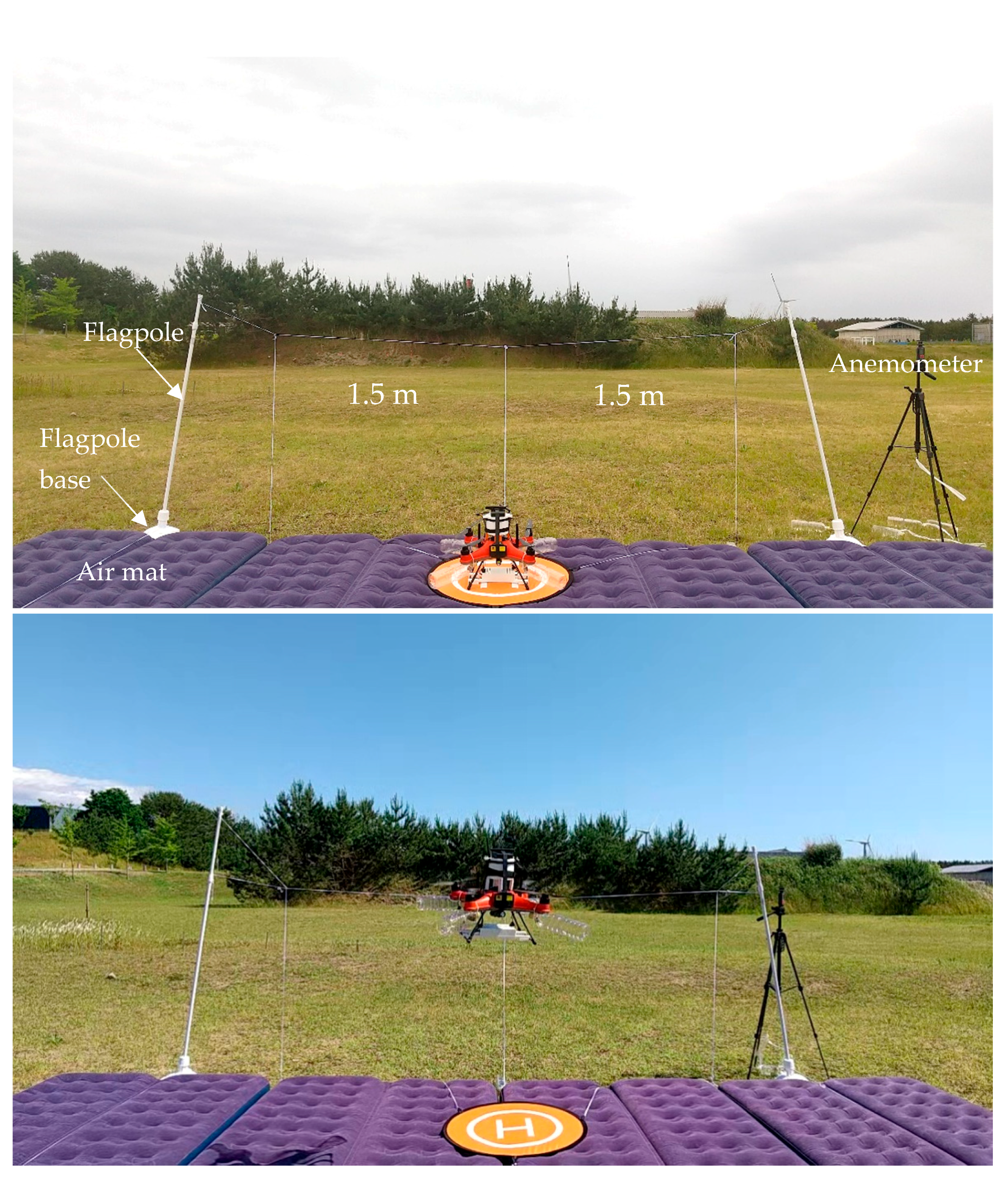
2.5.1. Flight Stability Test
2.5.2. Water Quality Data Stability Test
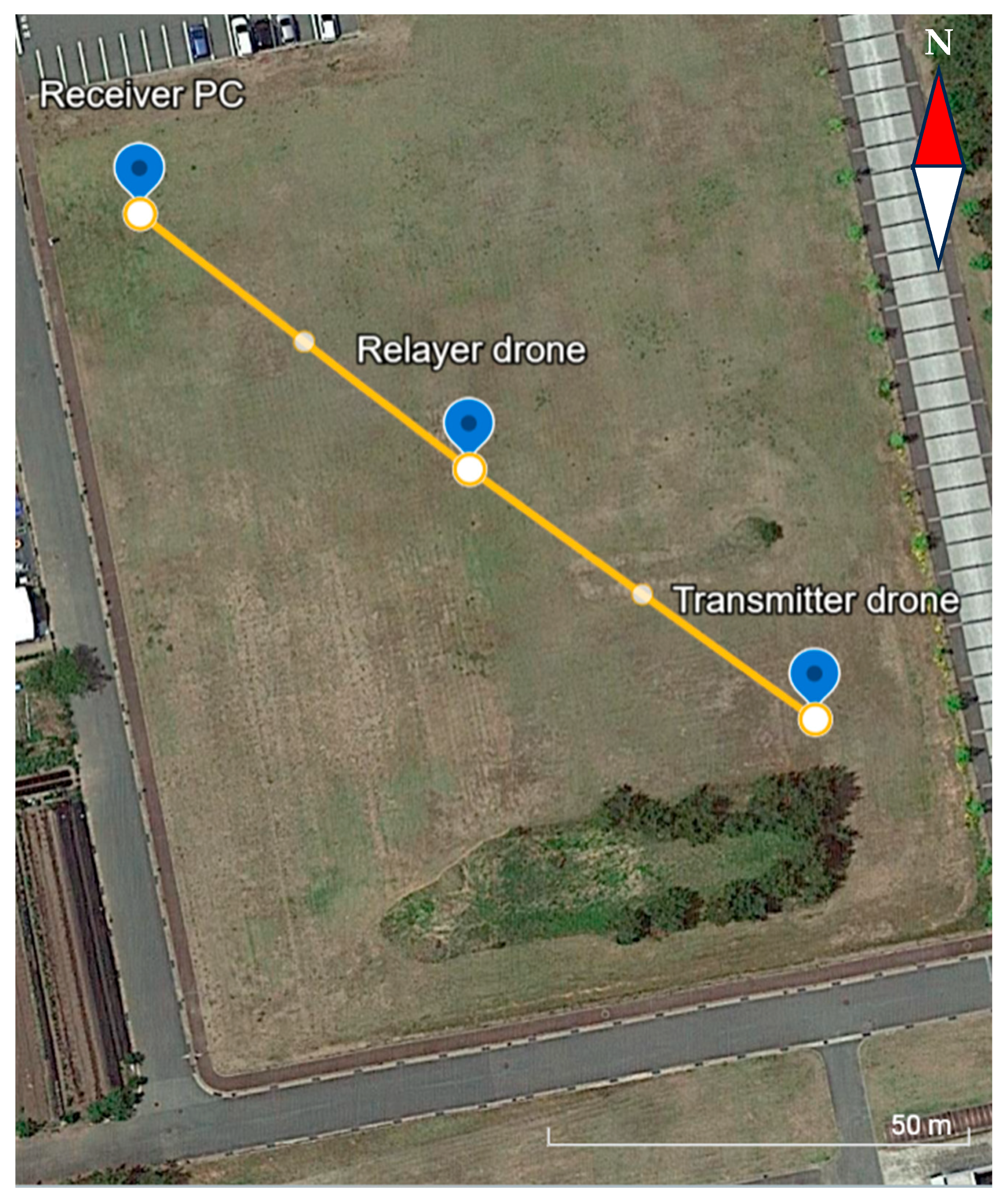
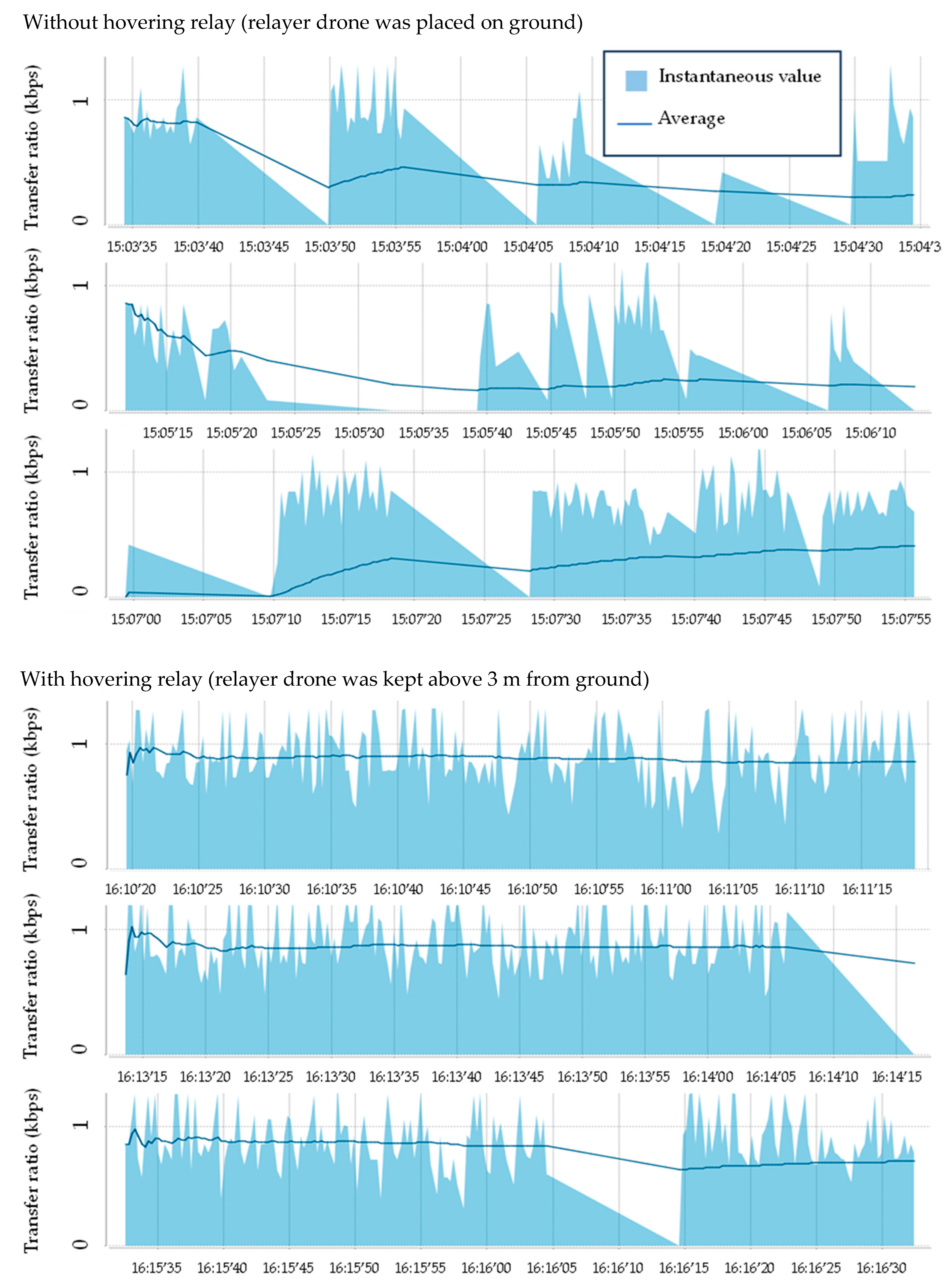
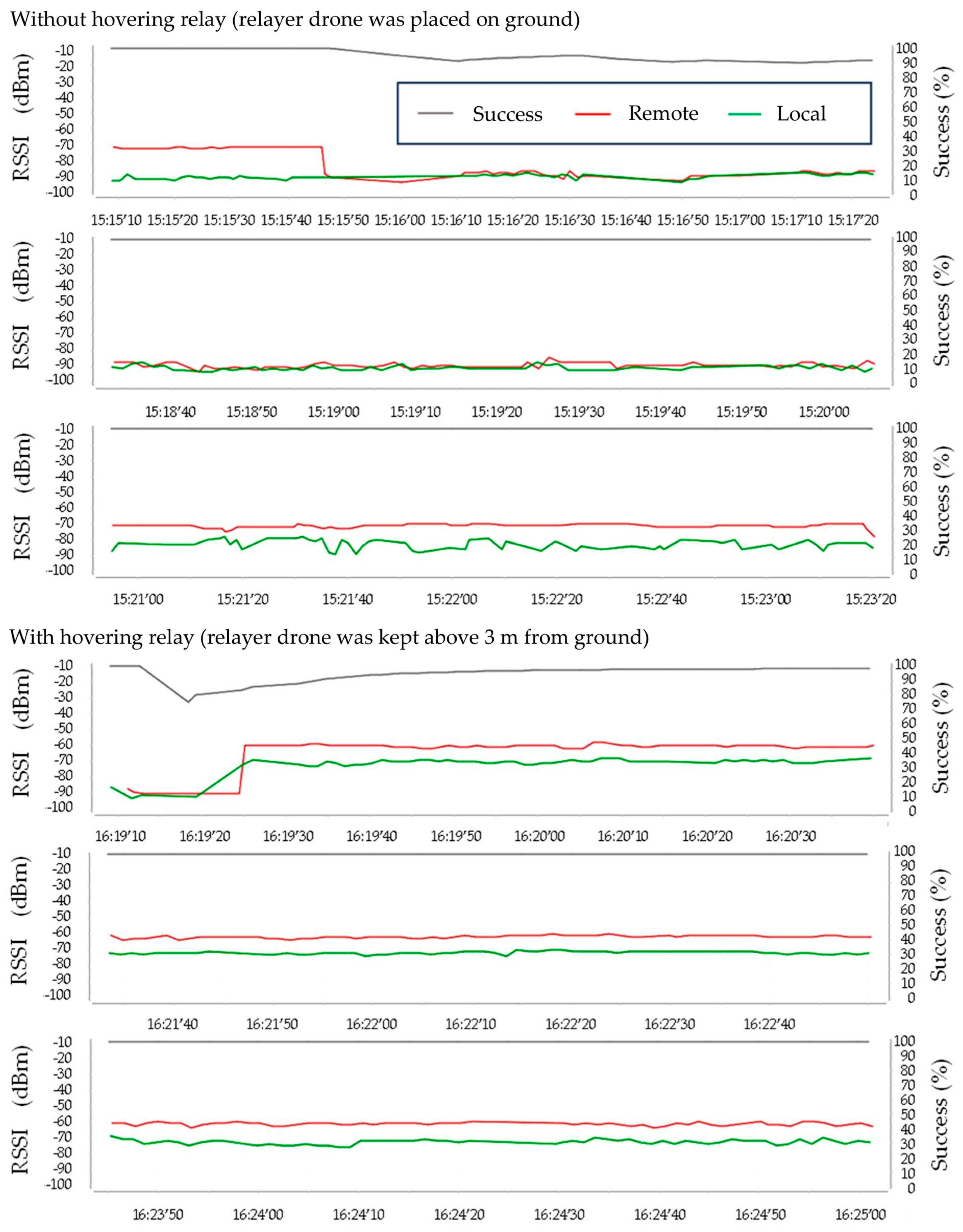
2.6. Evaluation of the Efficiency of Hovering Relay by Networking Metrics
2.7. Field Tests for the Wireless Data Relay
2.8. Legal Procedures for Field Tests
3. Results
3.1. System Stability Evaluations
3.1.1. Flight Stability Test
3.1.2. Water Quality Data Stability Test
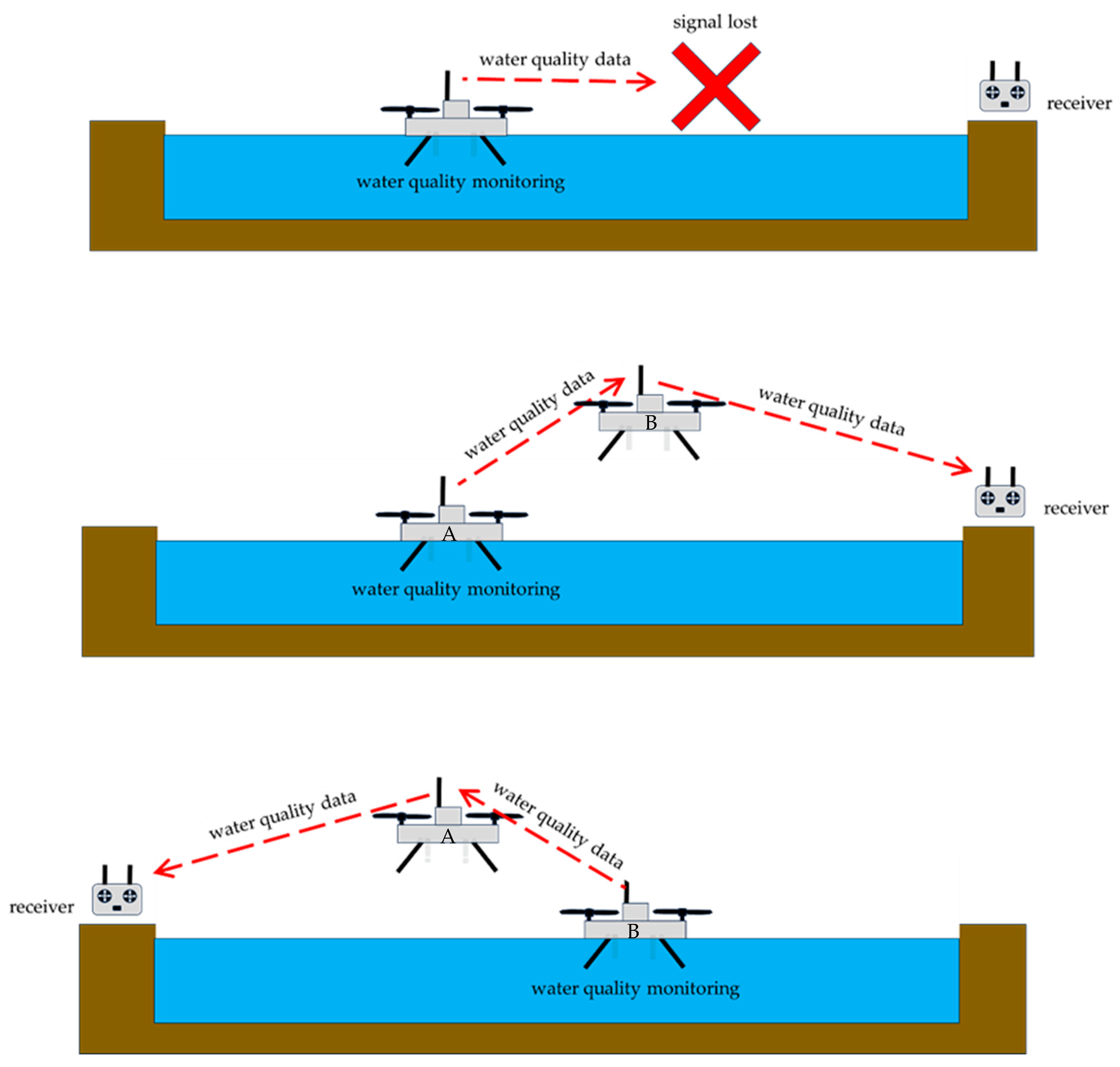
3.2. Wireless Data Relay by Introducing Additional (Relayer) Drone
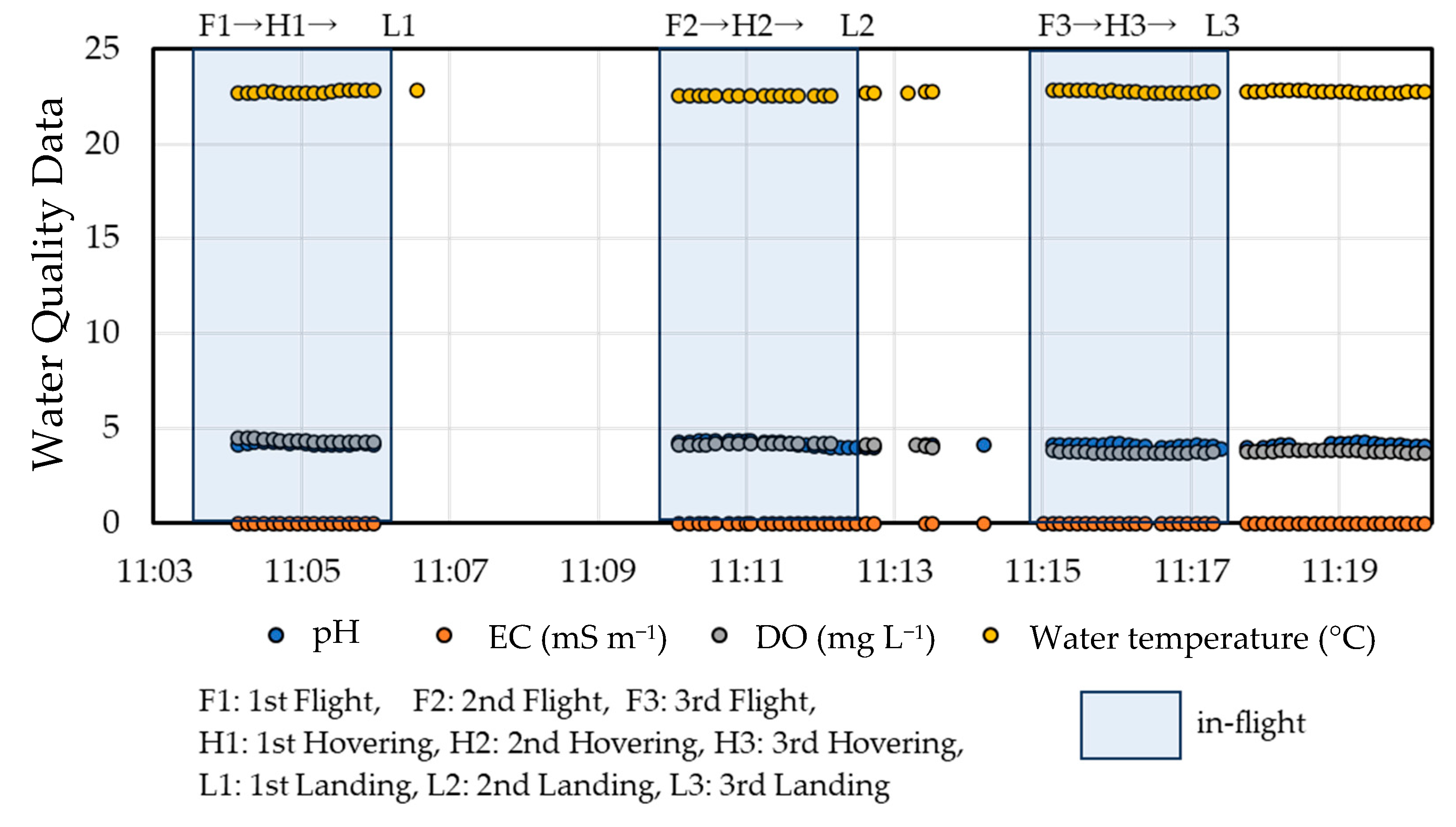
3.2.1. Evaluation of the Efficiency of Hovering Relay by Networking Metrics
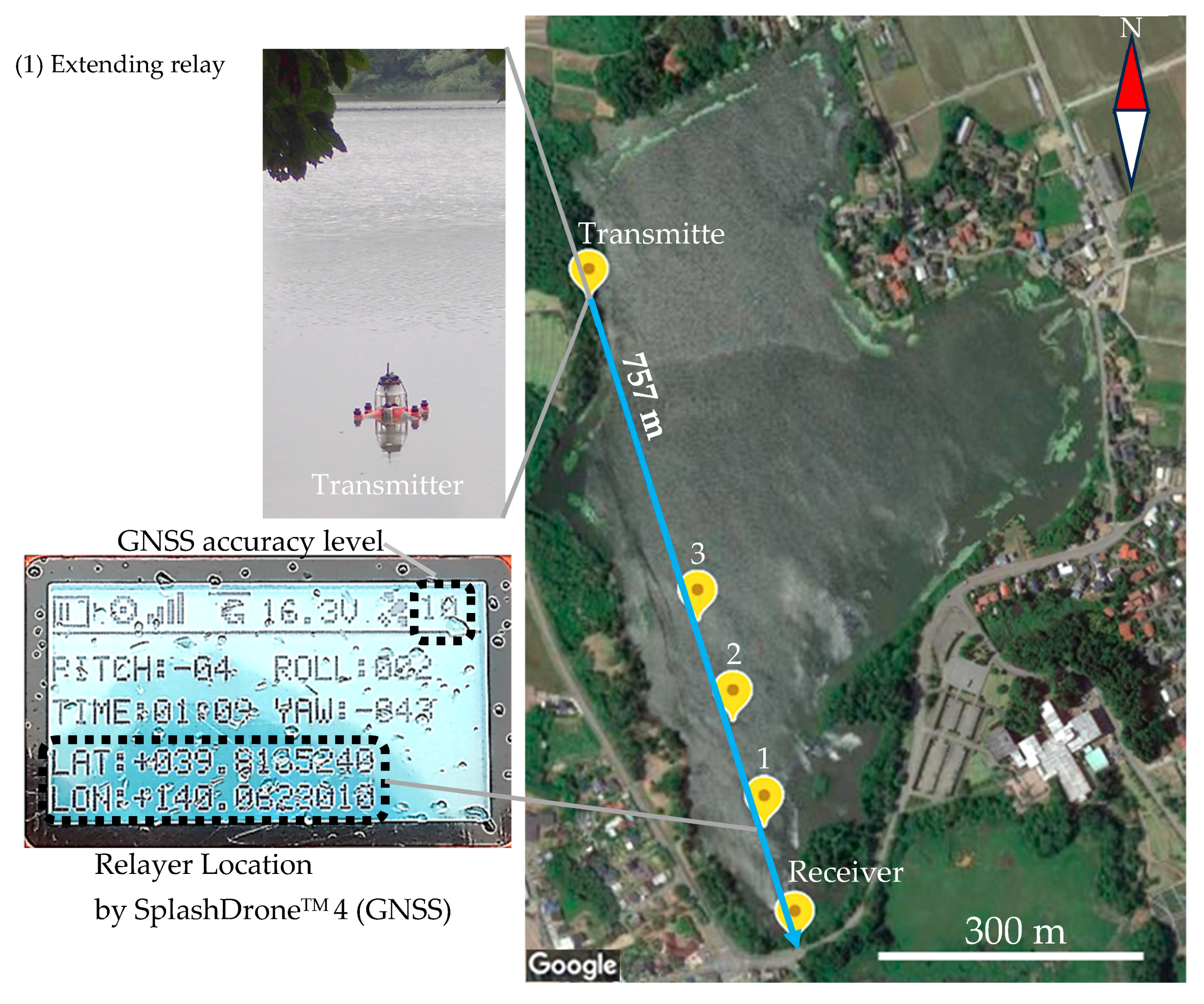
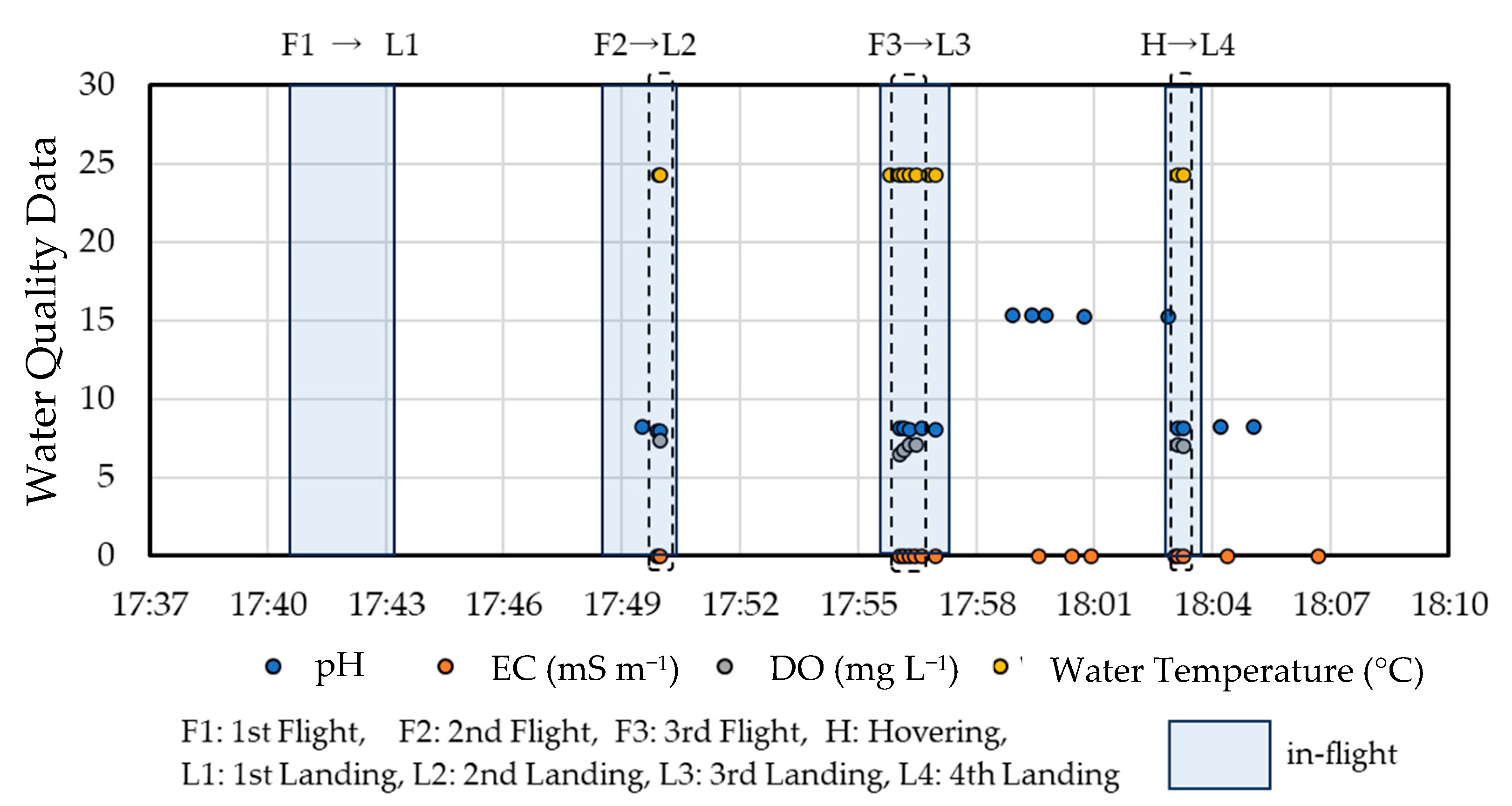
3.2.2. Extending Relay
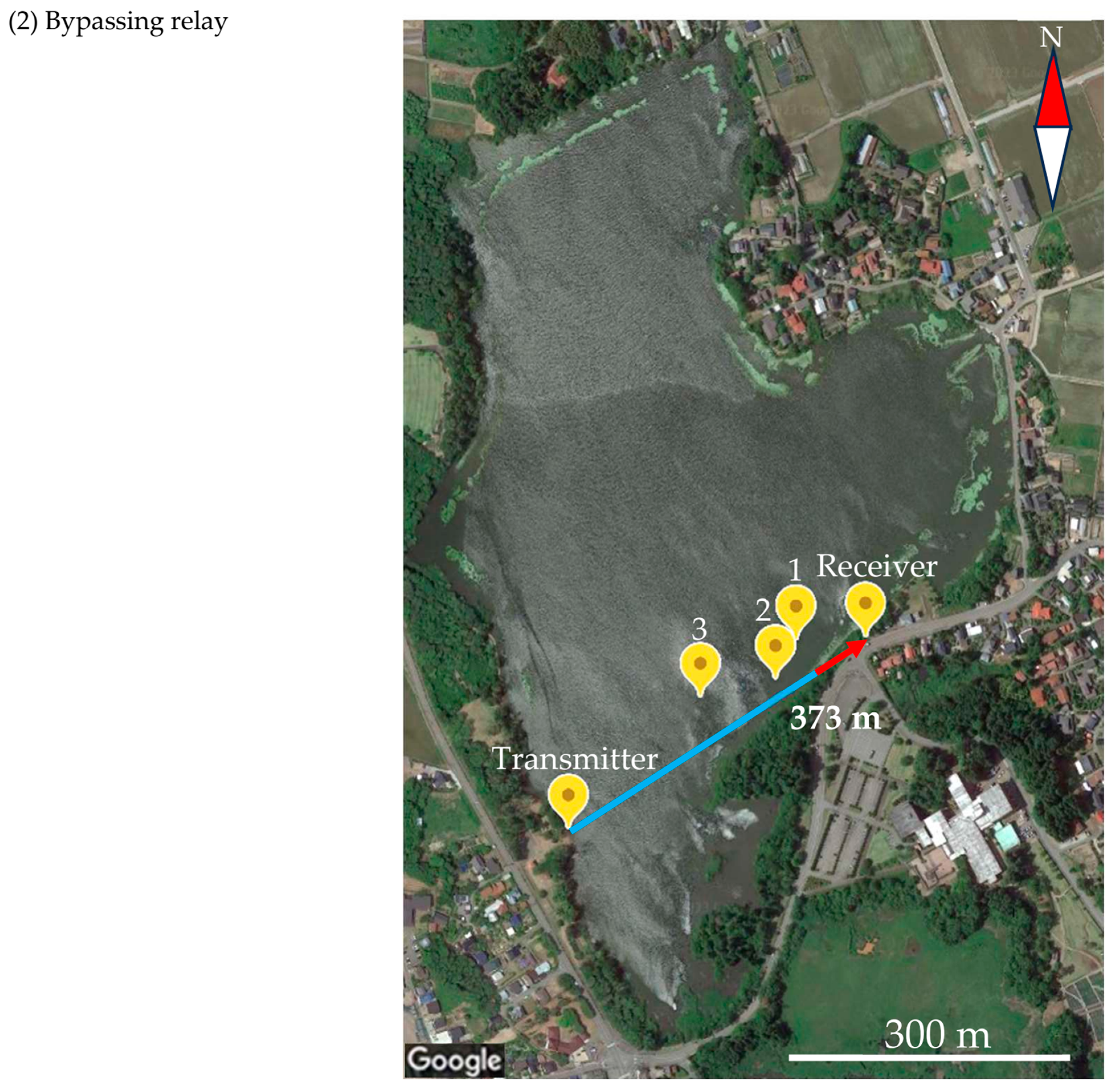
3.2.3. Bypassing Relay
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, X.; Wang, T.; Liang, J.; Yao, G.; Liu, M. Survey on the Novel Hybrid Aquatic–Aerial Amphibious Aircraft: Aquatic Unmanned Aerial Vehicle (AquaUAV). Prog. Aerosp. Sci. 2015, 74, 131–151. [Google Scholar] [CrossRef]
- Rodrigues, P.; Marques, F.; Pinto, E.; Pombeiro, R.; Lourenço, A.; Mendonça, R.; Santana, P.; Barata, J. An Open-Source Watertight Unmanned Aerial Vehicle for Water Quality Monitoring. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef] [PubMed]
- Faraji, A.; Haas-Stapleton, E.; Sorensen, B.; Scholl, M.; Goodman, G.; Buettner, J.; Schon, S.; Lefkow, N.; Lewis, C.; Fritz, B.; et al. Toys or Tools? Utilization of Unmanned Aerial Systems in Mosquito and Vector Control Programs. J. Econ. Entomol. 2021, 114, 1896–1909. [Google Scholar] [CrossRef] [PubMed]
- Den Ouden, C.J.; Wills, P.S.; Lopes, L.; Sanderson, J.; Ouyang, B. Evolution of the Hybrid Aerial Underwater Robotic System (HAUCS) for Aquaculture: Sensor Payload and Extension Development. Vehicles 2022, 4, 390–408. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV Remote Sensing Applications in Marine Monitoring: Knowledge Visualization and Review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Swellpro Technology Co., Ltd. SplashDrone 4 WQMS (Water Quality Monitoring System) User Manual; Version 1.0; Swellpro Technology Co., Ltd.: Shenzhen, China, 2022; pp. 6–7. Available online: https://support.swellpro.com/hc/article_attachments/14003389713433 (accessed on 13 September 2023).
- Spreng, J. Expanded Development of Consumer-Level Unmanned Aerial Vehicles for Oceanographic Research. Graduate Thesis, University of Washington, Seattle, WA, USA, 2 June 2019. Available online: https://digital.lib.washington.edu/researchworks/bitstream/handle/1773/45633/sprengjohncolvin_3569755_56886300_SprengThesis.pdf (accessed on 13 September 2023).
- Ryu, J.H. UAS-Based Real-Time Water Quality Monitoring, Sampling, and Visualization Platform (UASWQP). HardwareX 2022, 11, e00277. [Google Scholar] [CrossRef]
- Potter, B.; Valentino, G.; Yates, L.; Benzing, T.; Salman, A. Environmental Monitoring Using a Drone-Enabled Wireless Sensor Network. In Proceedings of the 2019 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 26 April 2019; pp. 1–6. [Google Scholar]
- Heng, F. Construction and Research of Water Quality Monitoring System Based on ZigBee Technology. In Proceedings of the E3S Web of Conferences 2020 (2nd International Conference on Civil Architecture and Energy Science), Changchun, China, 20–22 March 2020; Volume 165, p. 03060. [Google Scholar]
- Forcella, M. Creating a Mesh Sensor Network Using Raspberry Pi and XBee Radio Modules. Master’s Thesis, State University of New York, New Paltz, NY, USA, 2017. Available online: https://soar.suny.edu/bitstream/handle/20.500.12648/705/Forcella_Thesis.pdf (accessed on 13 September 2023).
- Ab Aziz, M.A.; Abas, M.; Faudzi, A.; Saad, N.M.; Irawan, A. Development of Wireless Passive Water Quality Catchment Monitoring System. J. Telecommun. Electron. Comput. Eng. 2018, 10, 37–40. [Google Scholar]
- Cheng, L.; Tan, X.; Yao, D.; Xu, W.; Wu, H.; Chen, Y. A Fishery Water Quality Monitoring and Prediction Evaluation System for Floating UAV Based on Time Series. Sensors 2021, 21, 4451. [Google Scholar] [CrossRef] [PubMed]
- Pan, M.; Chen, C.; Yin, X.; Huang, Z. UAV-Aided Emergency Environmental Monitoring in Infrastructure-Less Areas: LoRa Mesh Networking Approach. IEEE Internet Things J. 2021, 9, 2918–2932. [Google Scholar] [CrossRef]
- Campagnaro, F.; Steinmetz, F.; Renner, B.-C. Survey on Low-Cost Underwater Sensor Networks: From Niche Applications to Everyday Use. J. Mar. Sci. Eng. 2023, 11, 125. [Google Scholar] [CrossRef]
- Digi International Inc. XBee/XBee-PRO® S2C Zigbee® RF Module User Guide; Revision AN; Digi International Inc.: Hopkins, MN, USA, 2022; pp. 32–71. Available online: https://www.digi.com/resources/documentation/digidocs/pdfs/90002002.pdf (accessed on 13 September 2023).
- Swellpro Technology Co., Ltd. SplashDrone 4 User Manual; Version 2.3.2; Swellpro Technology Co., Ltd.: Shenzhen, China, 2022; pp. 37–39. Available online: https://support.swellpro.com/hc/article_attachments/14995989756569 (accessed on 13 September 2023).
- Loyka, S.; Kouki, A. Using Two Ray Multipath Model for Microwave Link Budget Analysis. IEEE Antennas Propag. Mag. 2001, 43, 31–36. [Google Scholar] [CrossRef]
- Jakes, W. Microwave Mobile Communication; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1974; pp. 81–83. Available online: https://courses.engr.illinois.edu/ece458/Jakes_Book_optim.pdf (accessed on 7 September 2023).
- Barrios-Ulloa, A.; Ariza-Colpas, P.P.; Sánchez-Moreno, H.; Quintero-Linero, A.P.; De la Hoz-Franco, E. Modeling Radio Wave Propagation for Wireless Sensor Networks in Vegetated Environments: A Systematic Literature Review. Sensors 2022, 22, 5285. [Google Scholar] [CrossRef]
- Nadziejko, A. Wireless Sensor Networking Applied to Swarms of Aquatic Drones. Ph.D. Thesis, Universidade da Beira Interior, Covilhã, Portugal, June 2016. Available online: https://ubibliorum.ubi.pt/bitstream/10400.6/5875/1/4906_10783.pdf (accessed on 13 September 2023).
- Fan, J.; Cui, M.; Zhang, G.; Chen, Y. Throughput Improvement for Multi-Hop UAV Relaying. IEEE Access 2019, 7, 147732–147742. [Google Scholar] [CrossRef]
- Kawamoto, Y.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. Toward Future Unmanned Aerial Vehicle Networks: Architecture, Resource Allocation and Field Experiments. IEEE Wirel. Commun. 2019, 26, 94–99. [Google Scholar] [CrossRef]
- Miura, R.; Kagawa, T.; Ono, F.; Shan, L.; Matsuda, T.; Kojima, F. Propagation Measurements of Multi-Hop Command and Telemetry Communications System in the 169 MHz Band for Drones. J. Robot. Mechatron. 2021, 33, 363–370. [Google Scholar] [CrossRef]
- Swellpro Technology Co., Ltd. SplashDrone 3+ User Manual; Version 1.5.4; Swellpro Technology Co., Ltd.: Shenzhen, China, 2021; p. 40. Available online: https://www.swellpro.co.za/wp-content/uploads/2021/04/84eca2209d-splashdrone-3-user-manual-v154en.pdf (accessed on 13 September 2023).
- Nowacki, H.; Ferreiro, L.D. Historical Roots of the Theory of Hydrostatic Stability of Ships. In Proceedings of the Eighth International Conference Stability of Ships and Ocean Vehicles, Madrid, Spain, 15–19 September 2003; pp. 1–30. [Google Scholar]
- Molland, A.F. Floatation and stability. In The Maritime Engineering Reference Book; Elsevier: Amsterdam, The Netherlands, 2011; pp. 75–115. [Google Scholar]
- Benson, B.B.; Krause, D., Jr. The Concentration and Isotopic Fractionation of Gases Dissolved in Freshwater in Equilibrium with the Atmosphere. 1. Oxygen. Limnol. Oceanogr. 1980, 25, 662–671. [Google Scholar] [CrossRef]
- de Camargo, E.T.; Spanhol, F.A.; Slongo, J.S.; da Silva, M.V.R.; Pazinato, J.; de Lima Lobo, A.V.; Coutinho, F.R.; Pfrimer, F.W.D.; Lindino, C.A.; Oyamada, M.S.; et al. Low-Cost Water Quality Sensors for IoT: A Systematic Review. Sensors 2023, 23, 4424. [Google Scholar] [CrossRef] [PubMed]
- Atlas Scientific LLC. pH Circuit; Version 5.0; Atlas Scientific LLC: Long Island, NY, USA, 2013; p. 14. Available online: http://www.codbyte.com.br/wp-content/uploads/2017/12/pH_Circuit_5.0.pdf (accessed on 30 August 2023).
- Yamamoto, B.; Wong, A.; Agcanas, P.J.; Jones, K.; Gaspar, D.; Andrade, R.; Trimble, A.Z. Received Signal Strength Indication (RSSI) of 2.4 GHz and 5 GHz Wireless Local Area Network Systems Projected over Land and Sea for near-Shore Maritime Robot Operations. J. Mar. Sci. Eng. 2019, 7, 290. [Google Scholar] [CrossRef]
- Mathew, K.; Tabassum, M. Analysis of bluetooth and zigbee signal penetration and interference in foliage. In Proceedings of the International MultiConference of Engineers and Computer Scientists (IMECS), Hong Kong, China, 16–18 March 2016; Volume 2, pp. 547–552. [Google Scholar]
- Haque, K.F.; Abdelgawad, A.; Yelamarthi, K. Comprehensive Performance Analysis of Zigbee Communication: An Experimental Approach with XBee S2C Module. Sensors 2022, 22, 3245. [Google Scholar] [CrossRef] [PubMed]
- Son, K.J.; Hong, S.H.; Moon, S.-P.; Chang, T.G.; Cho, H. Segmentized Clear Channel Assessment for IEEE 802.15. 4 Networks. Sensors 2016, 16, 815. [Google Scholar] [CrossRef] [PubMed]
- Chandhar, P.; Danev, D.; Larsson, E.G. Massive MIMO for Communications with Drone Swarms. IEEE Trans. Wirel. Commun. 2017, 17, 1604–1629. [Google Scholar] [CrossRef]
- Short, J.E.; Merrill, D.J.; Liao, E.W.; Kalanithi, J.J.; Loehr, K.; Guinn, C.A. Systems and Methods for Controlling Pilotless Aircraft. International Patent WO2016/161426 A1, 6 October 2016. [Google Scholar]
- Rangel, R.K.; Freitas, J.L.; Rodrigues, V.A. Development of a Multipurpose Hydro Environmental Tool Using Swarms, UAV and USV. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–15. [Google Scholar]
- Barbatei, R.; Skavhaug, A.; Johansen, T.A. Acquisition and Relaying of Data from a Floating Wireless Sensor Node Using an Unmanned Aerial Vehicle. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 677–686. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Float Type | Stable Hovering Time (s) | |
|---|---|---|
| Wind Scale 1–2 | Wind Scale 2–3 | |
| Polystyrene-foam bar (Figure 6a) | 41 ± 26 | 14 ± 1 |
| PET bottle (Figure 6b) | 43 ± 25 | 34 ± 6 |
| Coiled polyethylene-foam disc (Figure 6c) | Not Determined | Not Determined |
| Drone-only | >180 | 90 ± 47 |
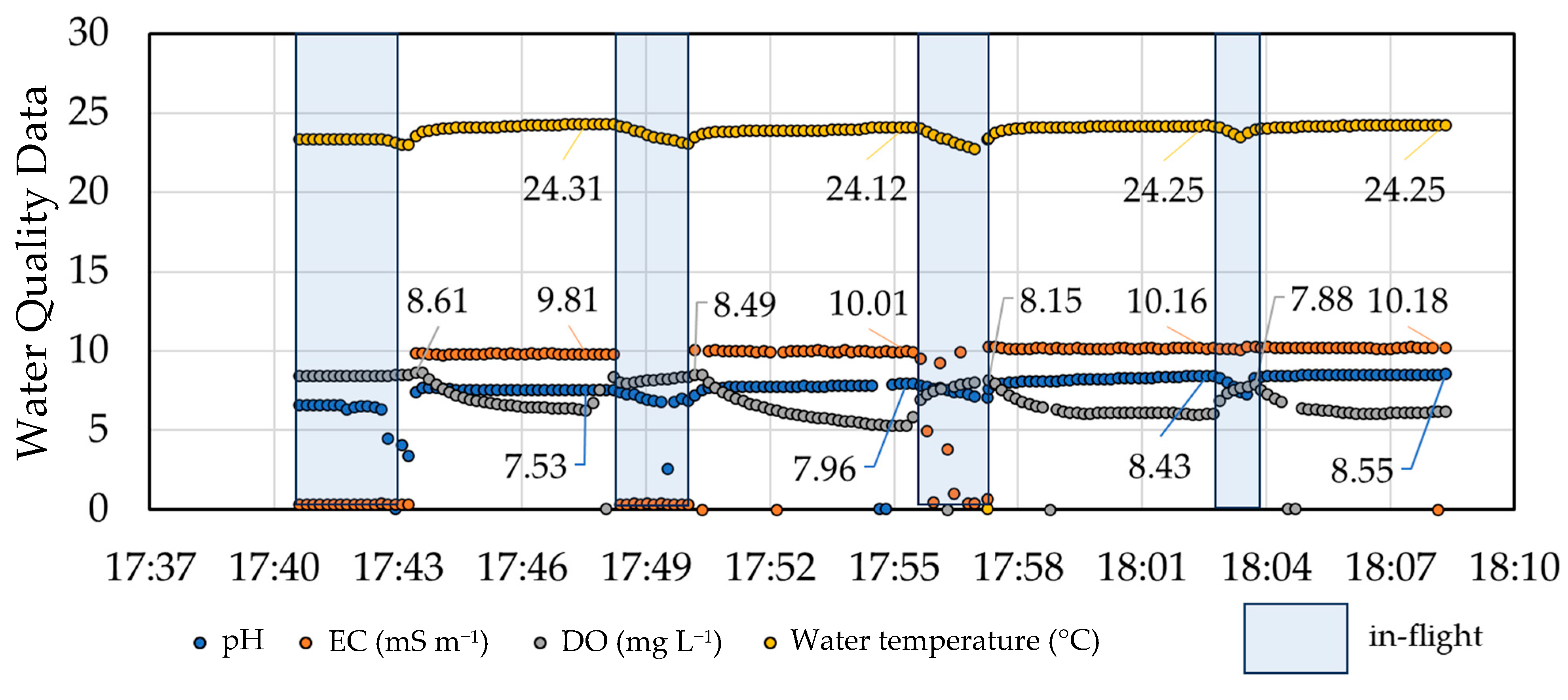
| Event | Time | pH | EC (mS m−1) | DO (mg L−1) | Water Temperature (°C) |
|---|---|---|---|---|---|
| 1st landing | 17:43–17:48 | 7.53 | 9.81 | 8.61 | 24.31 |
| 2nd landing | 17:50–17:55 | 7.96 | 10.01 | 8.49 | 24.12 |
| 3rd landing | 17:57–18:02 | 8.43 | 10.16 | 8.15 | 24.25 |
| 4th landing | 18:03–18:08 | 8.55 | 10.18 | 7.88 | 24.25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suetsugu, A.; Madokoro, H.; Nagayoshi, T.; Kikuchi, T.; Watanabe, S.; Inoue, M.; Yoshida, M.; Osawa, H.; Kurisawa, N.; Kiguchi, O. Development and Field Testing of a Wireless Data Relay System for Amphibious Drones. Drones 2024, 8, 38. https://doi.org/10.3390/drones8020038
Suetsugu A, Madokoro H, Nagayoshi T, Kikuchi T, Watanabe S, Inoue M, Yoshida M, Osawa H, Kurisawa N, Kiguchi O. Development and Field Testing of a Wireless Data Relay System for Amphibious Drones. Drones. 2024; 8(2):38. https://doi.org/10.3390/drones8020038
Chicago/Turabian StyleSuetsugu, Atsushi, Hirokazu Madokoro, Takeshi Nagayoshi, Takero Kikuchi, Shunsuke Watanabe, Makoto Inoue, Makoto Yoshida, Hitoshi Osawa, Nobumitsu Kurisawa, and Osamu Kiguchi. 2024. "Development and Field Testing of a Wireless Data Relay System for Amphibious Drones" Drones 8, no. 2: 38. https://doi.org/10.3390/drones8020038
APA StyleSuetsugu, A., Madokoro, H., Nagayoshi, T., Kikuchi, T., Watanabe, S., Inoue, M., Yoshida, M., Osawa, H., Kurisawa, N., & Kiguchi, O. (2024). Development and Field Testing of a Wireless Data Relay System for Amphibious Drones. Drones, 8(2), 38. https://doi.org/10.3390/drones8020038