
Optimizing Topology in Satellite–UAV Collaborative IoT: A Graph Partitioning Simulated Annealing Approach


Abstract
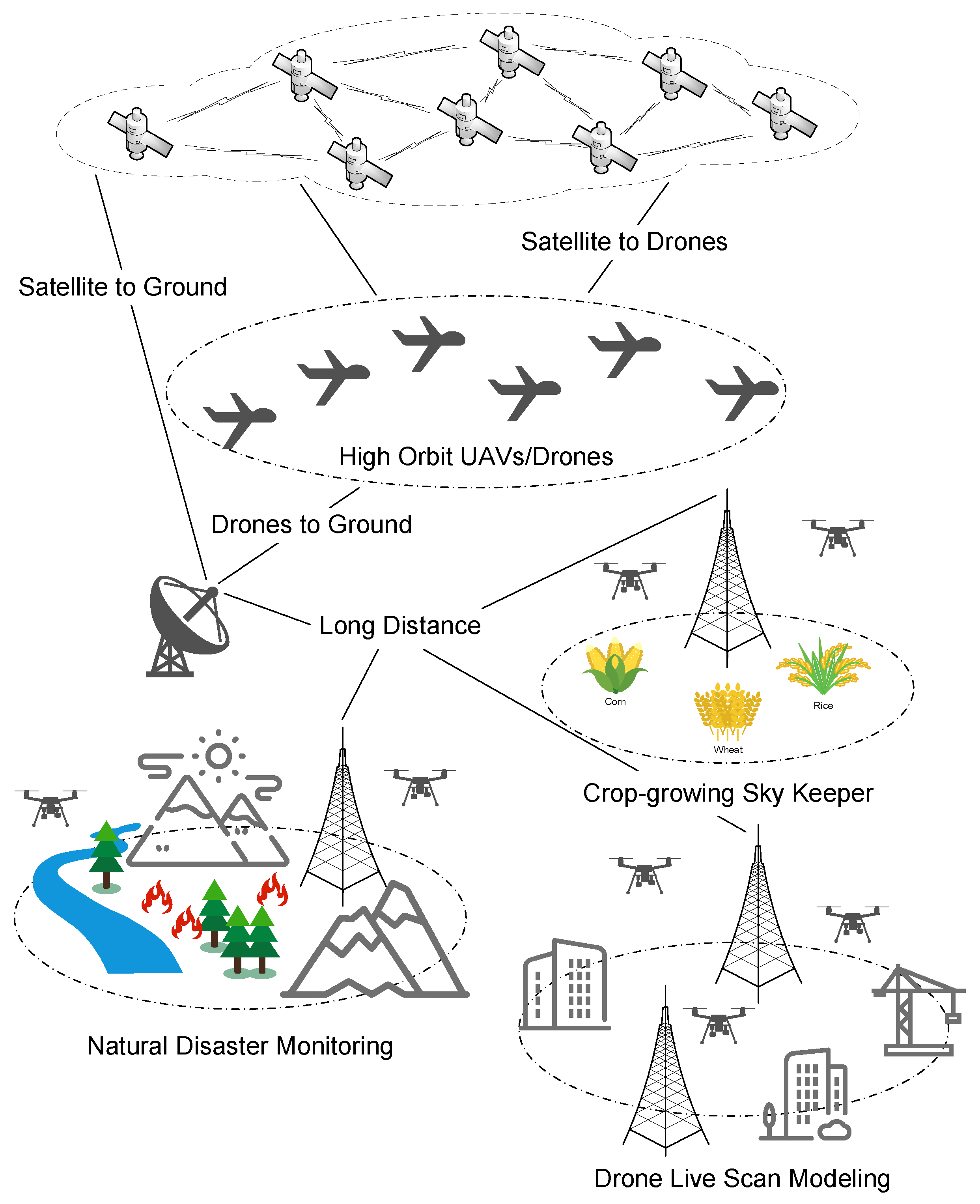
:1. Introduction
2. Related Work
3. Concepts and Models
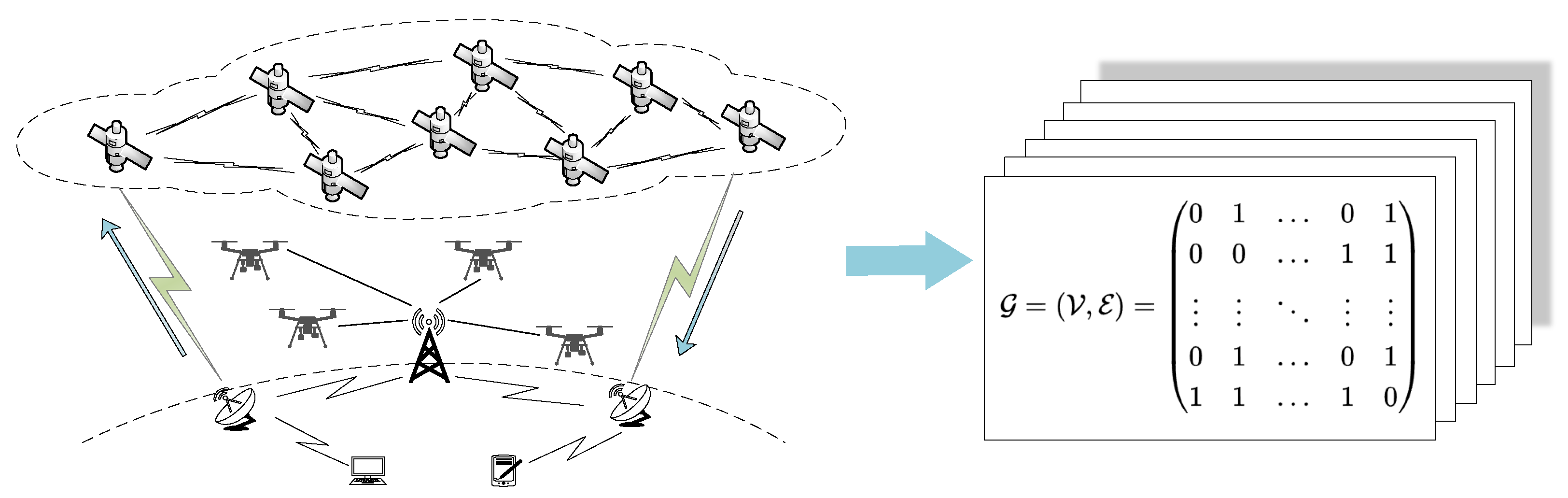
3.1. Network Modeling
3.2. Time Slice Modeling
3.3. Simulated Annealing
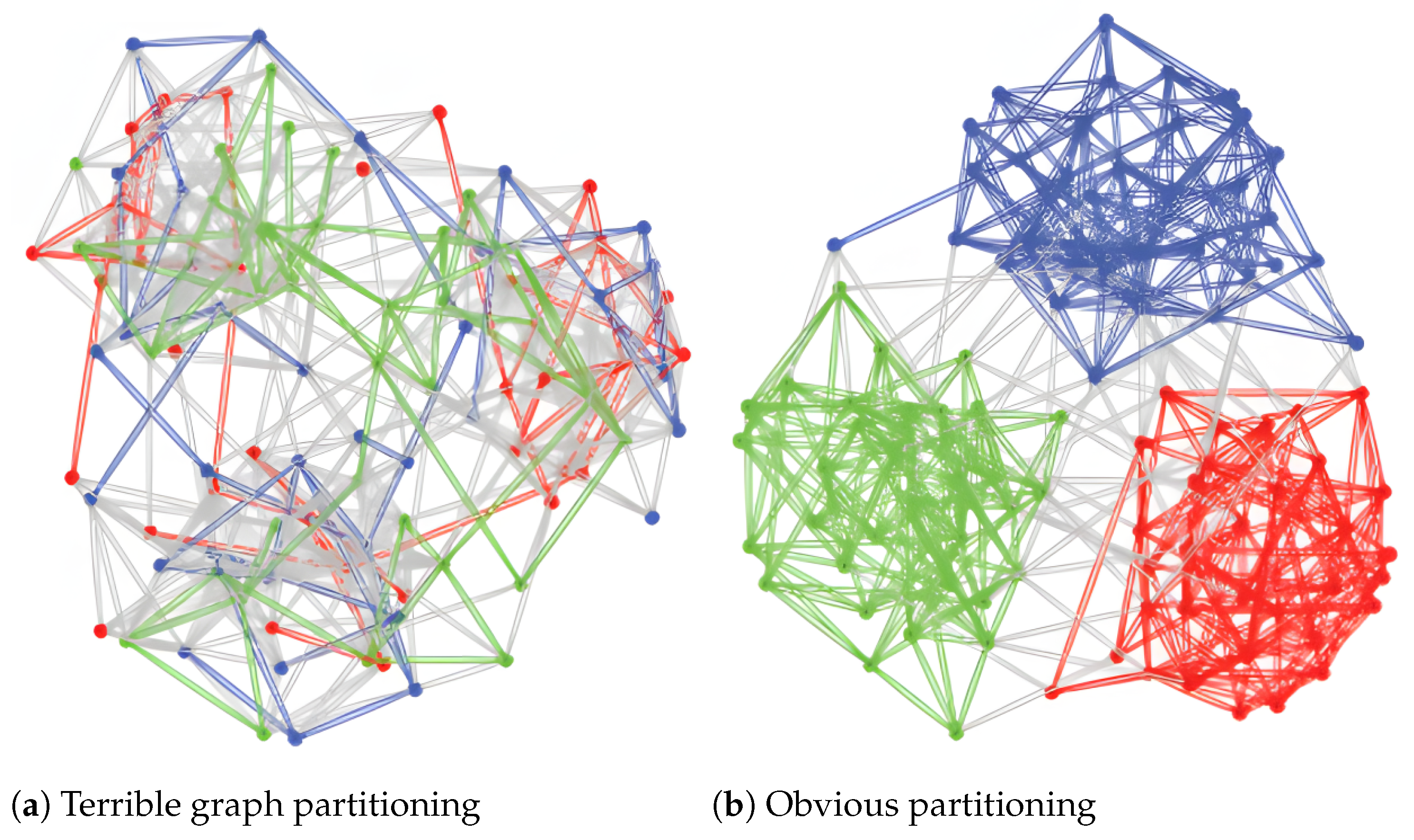
3.4. Graph Partitioning
4. Methodology
4.1. Optimization Objectives and Constraints
- For invisible node pairs, it is required that they cannot have links.
- Due to the limitation of the number of transmitters and receivers on satellites, the number of satellites that can be linked simultaneously with other satellites/drones is limited.
- Considering the load balancing of the overall network, the total number of links cannot exceed a given value.
- The internode communication is assumed to be bidirectional by default. For a link from to , there must be a corresponding edge from to .
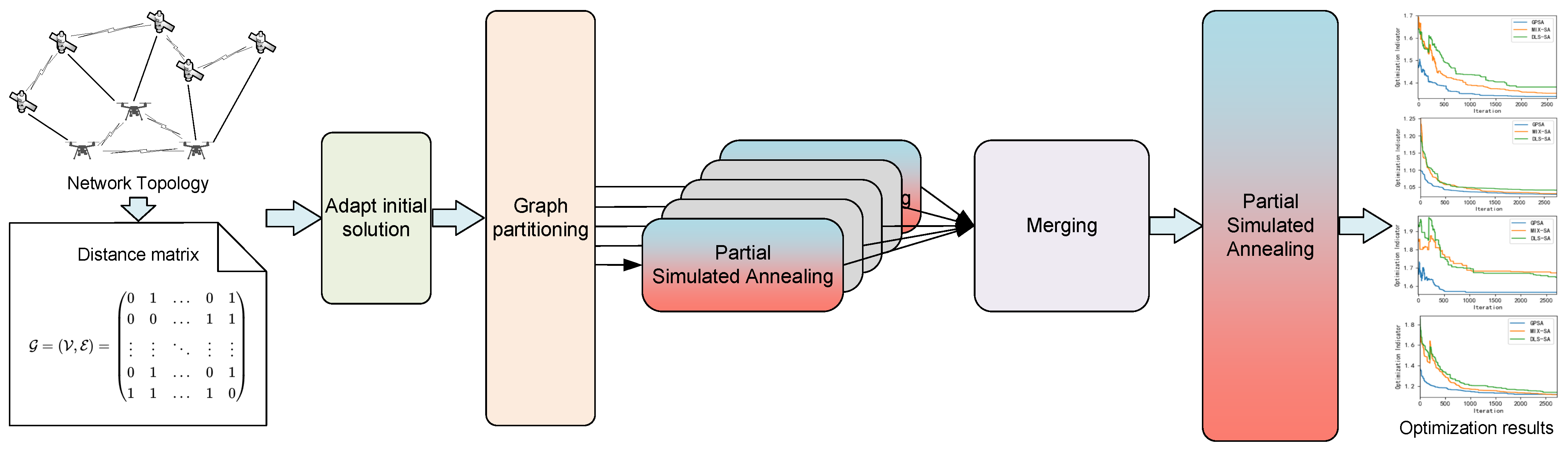
4.2. Simulated Annealing Optimization Based on Graph Partitioning
4.3. Complexity Analysis
4.3.1. Complexity Analysis of the Simulated Annealing Part
4.3.2. Complexity Analysis of the Graph Partitioning Part
4.3.3. Total Complexity Analysis
5. Implementation and Evaluation
5.1. Datasets
- Iridium. The Iridium constellation, consisting of 66 satellites, is composed of six circular orbits that pass over Earth’s poles. Each orbit plane contains 11 evenly distributed satellites, allowing for global coverage in this configuration.
- Globalstar. The Globalstar constellation consists of 48 satellites distributed among 8 circular orbits with an inclination of . Each orbit plane contains 6 satellites, and none of the Globalstar orbits pass over the poles. Due to the smaller number of satellites in the Globalstar constellation, the satellites are positioned at an altitude approximately twice that of the Iridium constellation to achieve global coverage.
- 108-Star-Drone. Additionally, in this section, a mega constellation in near-Earth orbit is generated using STK, comprising 96 satellites and 12 drones in formation. The 96 satellites are distributed across 6 orbital planes, with each plane containing 16 satellites, all at an orbit altitude of 550 km. The formation of 12 drones hovers uniformly near the ground.
5.2. Benchmark Methods
- MIX-SA [34]. Typically, the larger the connectivity of a network, the more stable and invulnerable it is. The size of the minimum cut represents the number of disjoint paths between two nodes in the network. The more disjoint paths there are, the stronger the network’s ability to maintain communication, even if a link fails. Simulated annealing algorithms based on maximum flow minimum cut exchange ensure that the connectivity of the solution is not reduced during each search for a neighboring solution.
- DLS-SA [13]. Dual-link random switching, as a heuristic local search strategy, is commonly used in combination with simulated annealing algorithms to solve combinatorial optimization problems. Its main idea is to randomly select two paths or links and exchange a portion of them to generate a new solution. This strategy helps to escape from local optima and increases the exploration capability of the search space.
5.3. Parameters and Indicators
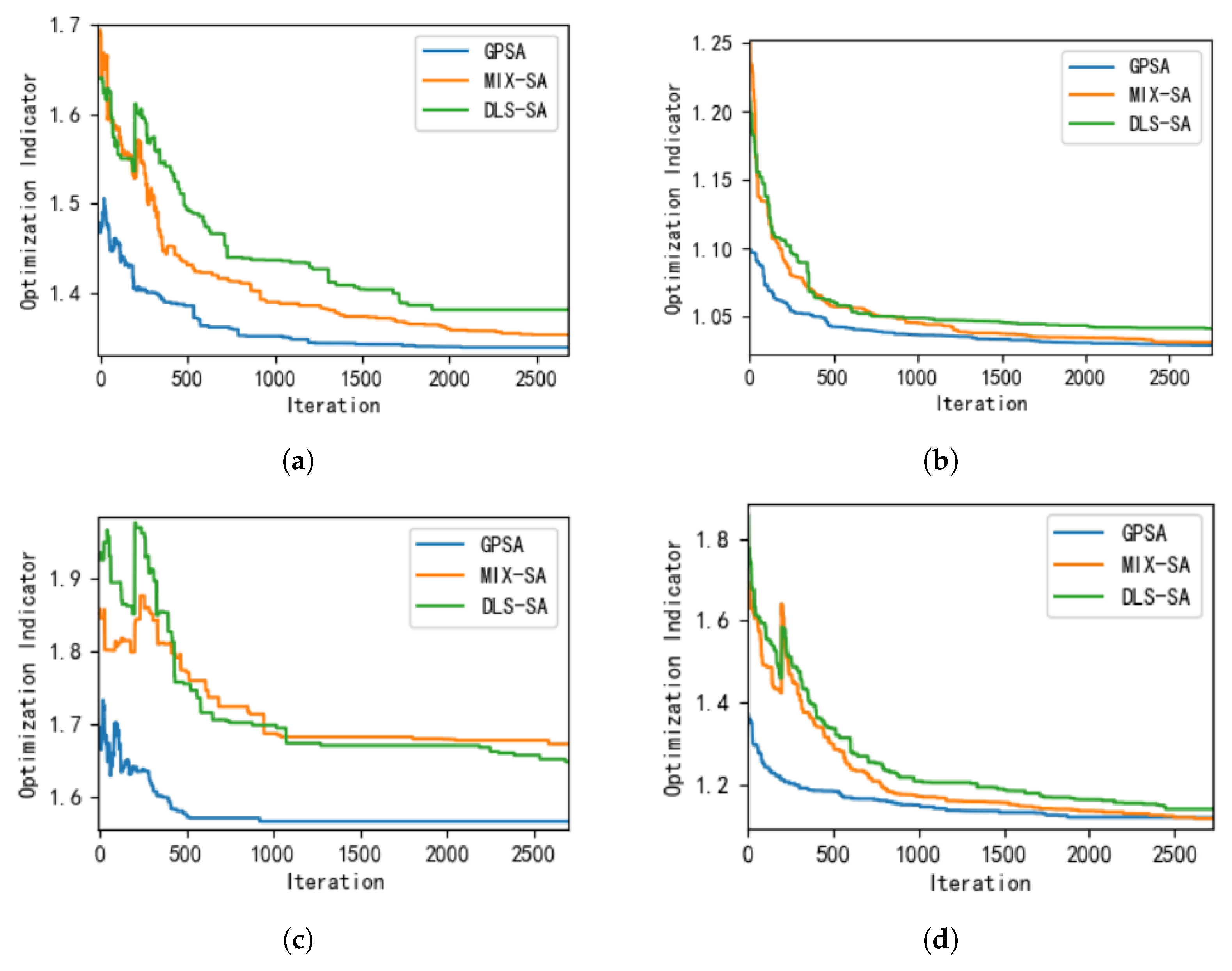
5.4. Performance Evaluation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhuo, M.; Liu, L.; Zhou, S.; Tian, Z. Survey on security issues of routing and anomaly detection for space information networks. Sci. Rep. 2021, 11, 22261. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Sheng, M.; Li, B.; Zhao, N. Survey on unmanned aerial vehicle communications for 6G. J. Electron. Inf. Technol. 2022, 44, 781–789. [Google Scholar]
- Wu, Y.; Feng, S.; Dong, C. Energy Constrained Data Collection in Multi-UAV-Assisted IoT. In Proceedings of the 2023 IEEE 97th Vehicular Technology Conference (VTC2023-Spring), Florence, Italy, 20–23 June 2023. [Google Scholar]
- Su, J.; Zhu, X.; Li, S.; Chen, W.H. AI meets UAVs: A survey on AI empowered UAV perception systems for precision agriculture. Neurocomputing 2022, 518, 242–270. [Google Scholar] [CrossRef]
- Reiss, M.; Mendes, T.; Pereira, F.; de Andrade, M.R.M.; Mendes, R.M.; Simões, S.J.C.; de Lara, R.; de Souza, S.F. Evaluation of an unmanned aerial vehicle (UAV) for measuring and monitoring natural disaster risk areas. ISPRS Arch. 2022, 43, 1077–1083. [Google Scholar] [CrossRef]
- Arafat, M.; Alam, M.; Moh, S. Vision-based navigation techniques for unmanned aerial vehicles: Review and challenges. Drones 2023, 7, 89. [Google Scholar] [CrossRef]
- Wu, Y.; Feng, S.; Dong, C.; Wang, W. Shooting utility maximization in UAV-assisted wireless camera sensor networks. Sensors 2022, 22, 3685. [Google Scholar] [CrossRef]
- Yang, S.; Feng, S.; Yu, H.; Zhang, S.; Cao, C.; Lin, W. UAV Assisted Outdoor Visible Light Positioning with Intelligent Ambient Light Noise Elimination. In Proceedings of the International Conference on Internet of Things, Communication and Intelligent Technology, Xuzhou, China, 22–24 September 2023. [Google Scholar]
- Tan, Y.; Li, G.; Cai, R.; Ma, J.; Wang, M. Mapping and modelling defect data from UAV captured images to BIM for building external wall inspection. Autom. Constr. 2022, 139, 104284. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q. Make more digital twins. Nature 2019, 573, 490–491. [Google Scholar] [CrossRef]
- Tian, Z.; Zhuo, M.; Liu, L.; Chen, J.; Zhou, S. Anomaly detection using spatial and temporal information in multivariate time series. Sci. Rep. 2023, 1, 4400. [Google Scholar] [CrossRef]
- Zhuo, M.; Huang, W.; Liu, L.; Zhou, S.; Tian, Z. A High-Utility Differentially Private Mechanism for Space Information Networks. Remote Sens. 2022, 14, 5844. [Google Scholar] [CrossRef]
- Yan, H.; Zhang, Q.; Sun, Y. Link assignment problem of navigation satellite networks with limited number of inter-satellite links. Acta Aeronaut. Astronaut. Sin. 2015, 36, 2329–2339. [Google Scholar]
- Shi, L.Y.; Xiang, W.; Tang, X.M. A link assignment algorithm applicable to crosslink ranging and data exchange for satellite navigation system. J. Astronaut. 2011, 32, 1971–1977. [Google Scholar]
- Dong, M.; Lin, B.; Liu, Y.; Zhou, L. Topology dynamic optimization for inter-satellite laser links of navigation satellite based on multi-objective simulated annealing method. Chin. J. Lasers 2018, 45, 0706004. [Google Scholar] [CrossRef]
- Song, W.; Yang, D. Research on GNSS Satellite-ground Service Information Transmission Scheduling Method Based on Inter-satellite Link. Acta Armamentarii 2019, 40, 1627. [Google Scholar]
- Zhou, Y.; Xie, Z.; Liu, P.; Liu, H. Inter-satellite load balancing routing algorithm for LEO satellite constellation based on regional-traffic-detour. J. UCA 2021, 38, 687. [Google Scholar]
- Dong, F.H.; Lv, J.; Gong, X.W.; Li, C. Optimization design of structure invulnerability in space information network. J. Commun. 2014, 35, 50–58. [Google Scholar]
- Han, Z.; Xu, C.; Zhao, G.; Wang, S.; Cheng, K.; Yu, S. Time-Varying Topology Model for Dynamic Routing in LEO Satellite Constellation Networks. IEEE Trans. Veh. Technol. 2022, 72, 3440–3454. [Google Scholar] [CrossRef]
- Wu, L.; Cui, P.; Pei, J.; Zhao, L.; Guo, X. Graph neural networks: Foundation, frontiers and applications. In Proceedings of the 28th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, 14–18 August 2022. [Google Scholar]
- Jiang, W. Graph-based deep learning for communication networks: A survey. Comput. Commun. 2022, 185, 40–54. [Google Scholar] [CrossRef]
- Li, H.; Yang, S.; Song, Y.; Luo, Y.; Li, J.; Zhou, T. Spatial dynamic graph convolutional network for traffic flow forecasting. Appl. Intell. 2023, 53, 14986–14998. [Google Scholar] [CrossRef]
- Veličković, P. Everything is connected: Graph neural networks. Curr. Opin. Struct. Biol. 2023, 79, 102538. [Google Scholar] [CrossRef] [PubMed]
- Schatzoff, M.; Tsao, R.; Wing, R. An experimental comparison of time sharing and batch processing. Commun. ACM 1967, 10, 261–265. [Google Scholar] [CrossRef]
- Huang, J.; Su, Y.; Liu, W.; Wang, F. Optimization design of inter-satellite link (ISL) assignment parameters in GNSS based on genetic algorithm. Adv. Space Res. 2017, 60, 2574–2580. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Liu, J.; Lai, Z.; Wu, Q.; Wang, X. A Timeslot Division Strategy for Availability in Integrated Satellite and Terrestrial Network. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Xu, W.; Zhou, M.; Fu, Z. Bi-Trajectory Hybrid Search to Solve Bottleneck-Minimized Colored Traveling Salesman Problems. IEEE Trans. Autom. Sci. Eng. 2023, 21, 895–905. [Google Scholar] [CrossRef]
- Vincent, F.Y.; Susanto, H.; Jodiawan, P.; Ho, T.W.; Lin, S.W.; Huang, Y.T. A simulated annealing algorithm for the vehicle routing problem with parcel lockers. IEEE Access 2022, 10, 20764–20782. [Google Scholar]
- Zhuo, M.; Yang, P.; Chen, J.; Liu, L.; Liu, C. Adaptive Optimization of Dynamic Heterogeneous Network Topologies: A Simulated Annealing Methodology. In Proceedings of the Artificial Intelligence and Security: 8th International Conference, Qinghai, China, 15–20 July 2022. [Google Scholar]
- Kassaymeh, S.; Al-Laham, M.; Al-Betar, M.A.; Alweshah, M.; Abdullah, S.; Makhadmeh, S.N. Backpropagation Neural Network optimization and software defect estimation modelling using a hybrid Salp Swarm optimizer-based Simulated Annealing Algorithm. Knowl.-Based Syst. 2022, 244, 108511. [Google Scholar] [CrossRef]
- Rahimian, F.; Payberah, A.H.; Girdzijauskas, S.; Jelasity, M.; Haridi, S. A distributed algorithm for large-scale graph partitioning. ACM Trans. Auton. Adapt. Syst. 2015, 10, 1–24. [Google Scholar] [CrossRef]
- Lee, D.S.; Rieger, H. Maximum flow and topological structure of complex networks. Europhys. Lett. 2005, 73, 471. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2022. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameters | Iridium | Globalstar | 108-Star-Drone |
|---|---|---|---|
| Orbital altitude (km) | 1414 | 780 | 550 |
| Orbital inclination | |||
| Number of orbital | 8 | 6 | 6 |
| Number of satellites in a single orbit | 6 | 11 | 16 |
| Polar constellation | Nonpolar | Polar | Nonpolar |
| Parameters | Range | Description |
|---|---|---|
| 48/66/108 | The number of satellites. | |
| 1/0 | The edges are weighted or unweighted. | |
| Number of time slices to be processed. | ||
| Restriction of sum of links. | ||
| Restriction of degree for each satellite. | ||
| Depends on the distribution of the data | Exit threshold for simulated annealing. |
| Algorithm | GPSA | MIX-SA | DLS-SA |
|---|---|---|---|
| Iterations Count | 105 | 11,119 | 34,044 |
| Runtime | 0.524 | 7.570 | 12.474 |
| Optimization Indicator | 1.4545 | 1.4947 | 1.4924 |
| Algorithm | GPSA | MIX-SA | DLS-SA |
|---|---|---|---|
| Iterations Count | 5998 | 6953 | 17,605 |
| Runtime | 2.436 | 2.562 | 4.164 |
| Optimization Indicator | 1.0282 | 1.0299 | 1.0298 |
| Algorithm | GPSA | MIX-SA | DLS-SA |
|---|---|---|---|
| Iterations Count | 2498 | 82,952 | 44,369 |
| Runtime | 0.508 | 7.034 | 6.925 |
| Optimization Indicator | 1.6897 | 1.6995 | 1.6963 |
| Algorithm | GPSA | MIX-SA | DLS-SA |
|---|---|---|---|
| Iterations Count | 51,370 | 73,645 | 199,869 |
| Runtime | 4.997 | 11.673 | 19.164 |
| Optimization Indicator | 1.1384 | 1.1458 | 1.1616 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuo, M.; Feng, Y.; Yang, P.; Tian, Z.; Liu, L.; Zhou, S. Optimizing Topology in Satellite–UAV Collaborative IoT: A Graph Partitioning Simulated Annealing Approach. Drones 2024, 8, 44. https://doi.org/10.3390/drones8020044
Zhuo M, Feng Y, Yang P, Tian Z, Liu L, Zhou S. Optimizing Topology in Satellite–UAV Collaborative IoT: A Graph Partitioning Simulated Annealing Approach. Drones. 2024; 8(2):44. https://doi.org/10.3390/drones8020044
Chicago/Turabian StyleZhuo, Ming, Yiming Feng, Peng Yang, Zhiwen Tian, Leyuan Liu, and Shijie Zhou. 2024. "Optimizing Topology in Satellite–UAV Collaborative IoT: A Graph Partitioning Simulated Annealing Approach" Drones 8, no. 2: 44. https://doi.org/10.3390/drones8020044
APA StyleZhuo, M., Feng, Y., Yang, P., Tian, Z., Liu, L., & Zhou, S. (2024). Optimizing Topology in Satellite–UAV Collaborative IoT: A Graph Partitioning Simulated Annealing Approach. Drones, 8(2), 44. https://doi.org/10.3390/drones8020044