
UAV Photogrammetric Surveys for Tree Height Estimation



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Areas
2.2. UAV Photogrammetric Surveys
2.3. UAV Data Processing
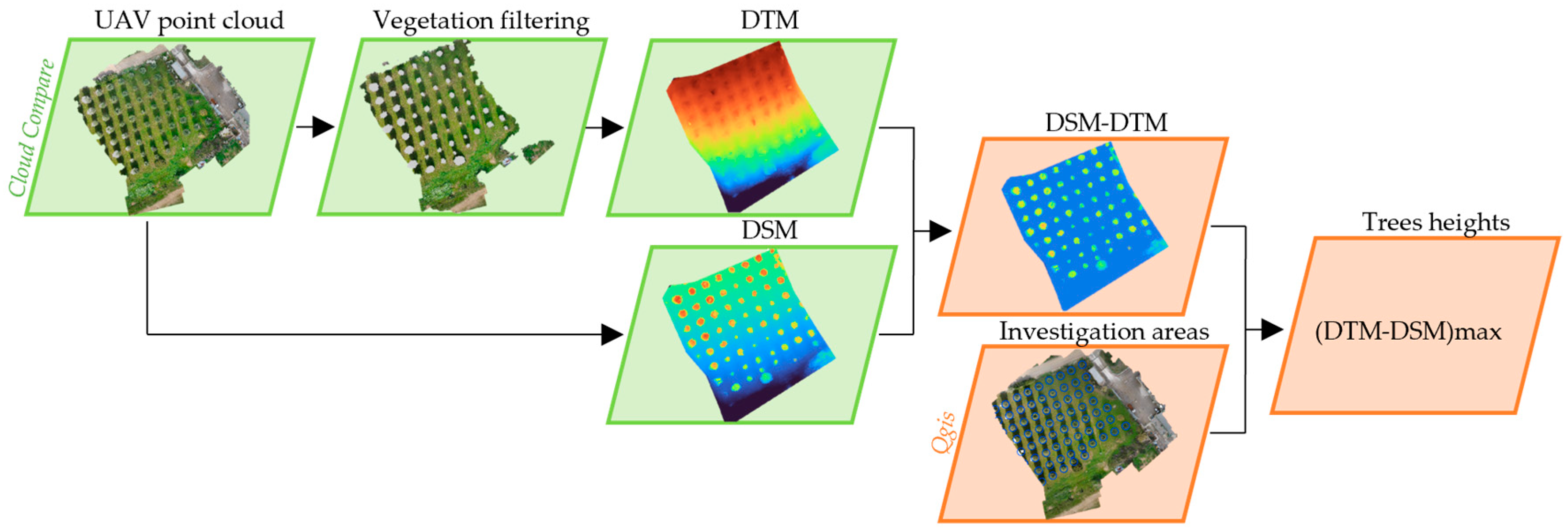
2.4. GIS-Based Approach for Tree Height Extraction
2.5. Field Measurements of Tree Heights and Statistical Analysis
3. Results
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ammoniaci, M.; Kartsiotis, S.-P.; Perria, R.; Storchi, P. State of the Art of Monitoring Technologies and Data Processing for Precision Viticulture. Agriculture 2021, 11, 201. [Google Scholar] [CrossRef]
- Pagliai, A.; Ammoniaci, M.; Sarri, D.; Lisci, R.; Perria, R.; Vieri, M.; D’Arcangelo, M.E.M.; Storchi, P.; Kartsiotis, S.-P. Comparison of Aerial and Ground 3D Point Clouds for Canopy Size Assessment in Precision Viticulture. Remote Sens. 2022, 14, 1145. [Google Scholar] [CrossRef]
- Crookston, R.K. A top 10 list of developments and issue impacting crop management and ecology during the past 50 years. Crop Sci. 2006, 46, 2253–2262. [Google Scholar] [CrossRef]
- Casa, R.; Airoldi, G.; Balsari, P.; Basso, B.; Boschetti, M.; Buttafuoco, G.; Calcante, A.; Cammarano, D.; Castaldi, F.; Castrignanò, A.; et al. Agricoltura diprecisione. Metodi etecnologie per migliorare l’efficienza e lasostenibilità dei sistemi colturali. In Agricoltura di Precisione; Edagricole—Edizioni Agricole di New Business Media srl: Milano, Italy, 2016; Available online: https://www.edagricole.it/wp-content/uploads/2020/03/5510-Agricoltura-di-precisione-SFOGLIA.pdf (accessed on 1 September 2023).
- Vacca, G.; Quaquero, E. BIM-3D GIS: An integrated system for the knowledge process of the buildings. J. Spat. Sci. 2020, 65, 193–208. [Google Scholar] [CrossRef]
- Belcore, E.; Angeli, S.; Colucci, E.; Musci, M.A.; Aicardi, I. Precision Agriculture Workflow, from Data Collection to Data Management Using FOSS Tools: An Application in Northern Italy Vineyard. ISPRS Int. J. Geo-Inf. 2021, 10, 236. [Google Scholar] [CrossRef]
- Hobart, M.; Pflanz, M.; Weltzien, C.; Schirrmann, M. Growth height determination of tree walls for precise monitoring in apple fruit production using UAV photogrammetry. Remote Sens. 2020, 12, 1656. [Google Scholar] [CrossRef]
- Zaru, N.; Rossi, M.; Vacca, G.; Vignoli, G. Spreading of Localized Information across an Entire 3D Electrical Resistivity Volume via Constrained EMI Inversion Based on a Realistic Prior Distribution. Remote Sens. 2022, 15, 3993. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high-resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Vecchi, E.; Tavasci, L.; De Nigris, N.; Gandolfi, S. GNSS and photogrammetric UAV derived data for coastal monitoring: A case of study in Emilia-Romagna, Italy. J. Mar. Sci. Eng. 2021, 9, 1194. [Google Scholar] [CrossRef]
- Zhang, H.L.; Tian, W.T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3d modelling–current status and future perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 25–31. [Google Scholar] [CrossRef]
- Wallace, L. Assessing the stability of canopy maps produced from UAV-LiDAR data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 3879–3882. [Google Scholar]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Argamosa, R.J.L.; Paringit, E.C.; Quinton, K.R.; Tandoc, F.A.M.; Faelga, R.A.G.; Ibañez, C.A.G.; Posilero, M.A.V.; Zaragosa, G.P. Fully automated GIS-based individual tree crown delineation based on curvature values from a lidar derived canopy height model in a coniferous plantation. Int. Arch. Photogramm Remote Sens. Spat. Inf. Sci. 2016, 41, 563–569. [Google Scholar] [CrossRef]
- Beloiu, M.; Heinzmann, L.; Rehush, N.; Gessler, A.; Griess, V.C. Individual Tree-Crown Detection and Species Identification in Heterogeneous Forests Using Aerial RGB Imagery and Deep Learning. Remote Sens. 2023, 15, 1463. [Google Scholar] [CrossRef]
- Tiede, D.; Hochleitner, G.; Blaschke, T. A full GIS-based workflow for tree identification and tree crown delineation using laser scanning. In Proceedings of the ISPRS Workshop CMRT 2005, Vienna, Australia, 29–30 August 2005; Volume 5. [Google Scholar]
- Latella, M.; Sola, F.; Camporeale, C. A density-based algorithm for the detection of individual trees from LiDAR data. Remote Sens. 2021, 13, 322. [Google Scholar] [CrossRef]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.-G. Unmanned Aerial Vehicles (UAV) in Precision Agriculture: Applications and Challenges. Energies 2022, 15, 217. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Slavik, M. 3D point cloud fusion from UAV and TLS to assess temperate managed forest structures. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102917. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.; Mund, J.P.; Greve, K. UAV-based photogrammetric tree height measurement for intensive forest monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Estimating tree height and volume using unmanned aerial vehicle photography and SfM technology, with verification of result accuracy. Drones 2020, 4, 19. [Google Scholar] [CrossRef]
- Yurtseven, H.; Akgul, M.; Coban, S.; Gulci, S. Determination and accuracy analysis of individual tree crown parameters using UAV based imagery and OBIA techniques. Measurement 2019, 145, 651–664. [Google Scholar] [CrossRef]
- Komárek, J.; Klápště, P.; Hrach, K.; Klouček, T. The potential of widespread UAV cameras in the identification of conifers and the delineation of their crowns. Forests 2022, 13, 710. [Google Scholar] [CrossRef]
- Huo, L.; Lindberg, E.; Holmgren, J. Towards low vegetation identification: A new method for tree crown segmentation from LiDAR data based on a symmetrical structure detection algorithm (SSD). Remote Sens. Environ. 2022, 270, 112857. [Google Scholar] [CrossRef]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef]
- Moudrý, V.; Klápště, P.; Fogl, M.; Gdulová, K.; Barták, V.; Urban, R. Assessment of LiDAR ground filtering algorithms for determining ground surface of non-natural terrain overgrown with forest and steppe vegetation. Measurement 2020, 150, 107047. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Pourreza, M.; Moradi, F.; Khosravi, M.; Deljouei, A.; Vanderhoof, M.K. GCPs-free photogrammetry for estimating tree height and crown diameter in Arizona Cypress plantation using UAV-mounted GNSS RTK. Forests 2022, 13, 1905. [Google Scholar] [CrossRef]
- Surový, P.; Ribeiro, N.A.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Gülci, S. The determination of some stand parameters using SfM-based spatial 3D point cloud in forestry studies: An analysis of data production in pure coniferous young forest stands. Environ. Monit. Assess. 2019, 191, 495. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Pearse, G.D.; Dash, J.P.; Persson, H.J.; Watt, M.S. Comparison of high-density LiDAR and satellite photogrammetry for forest inventory. ISPRS J. Photogramm. Remote Sens. 2018, 142, 257–267. [Google Scholar] [CrossRef]
- Belcore, E.; Latella, M. Riparian ecosystems mapping at fine scale: A density approach based on multi-temporal UAV photogrammetric point clouds. Remote Sens. Ecol. Conserv. 2022, 8, 644–655. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Vacca, G. Estimating tree height using low-cost UAV. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, 48, 381–386. [Google Scholar] [CrossRef]
- Naveed, M.; Ghaffar, M.; Khan, Z.; Gul, N.; Ijaz, I.; Bibi, A.; Pervaiz, S.; Alharby, H.F.; Tariq, M.S.; Ahmed, S.R.; et al. Morphological and Structural Responses of Albizia lebbeck to Different Lead and Nickel Stress Levels. Agriculture 2023, 13, 1302. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Zhao, Z.; Zhang, K.; Tian, C.; Mai, W. Progress of Euhalophyte Adaptation to Arid Areas to Remediate Salinized Soil. Agriculture 2023, 13, 704. [Google Scholar] [CrossRef]
- Matsuura, Y.; Heming, Z.; Nakao, K.; Qiong, C.; Firmansyah, I.; Kawai, S.; Yamaguchi, Y.; Maruyama, T.; Hayashi, H.; Nobuhara, H. High-precision plant height measurement by drone with RTK-GNSS and single camera for real-time processing. Sci. Rep. 2023, 13, 6329. [Google Scholar] [CrossRef]
- Shahbazi, M.; Sohn, G.; Théau, J.; Menard, P. Development and Evaluation of a UAV-Photogrammetry System for Precise 3D Environmental Modeling. Sensors 2015, 15, 27493–27524. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Sarnet, Web Server della Rete di Stazioni Permanenti Della Sardegna. Available online: www.sarnet.it/servizi.html (accessed on 1 January 2024).
- Centro Interregionale per I Sistemi Informatici Geografici e Statistici In Liquidazione. Trasformazioni di Coordinate—Il Software ConveRgo. Available online: https://www.cisis.it/?page_id=3214 (accessed on 1 January 2024).
- International Service for the Geoid (ISG). Italy (ITALGEO05). Available online: https://www.isgeoid.polimi.it/Geoid/Europe/Italy/italgeo05_g.html (accessed on 1 January 2024).
- AgiSoft PhotoScan Standard (Version 1.2.6) (Software). (2016*). Available online: http://www.agisoft.com/downloads/installer/ (accessed on 27 January 2024).
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Liang, Y.; Yang, Y.; Fan, X.; Cui, T. Efficient and Accurate Hierarchical SfM Based on Adaptive Track Selection for Large-Scale Oblique Images. Remote Sens. 2023, 15, 1374. [Google Scholar] [CrossRef]
- Lingua, A.M.; Maschio, P.; Spadaro, A.; Vezza, P.; Negro, G. Iterative Refraction-Correction Method on Mvs-Sfm for Shallow Stream Bathymetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-1/W1-2023, 249–255. [Google Scholar] [CrossRef]
- CloudCompare. Available online: https://www.danielgm.net/cc/ (accessed on 1 January 2024).
- Isenburg, M. LAStools—Efficient LiDAR Processing Software (Version 141017, Unlicensed). Available online: http://rapidlasso.com/LAStools (accessed on 1 September 2023).
- Qgis Documentation. Available online: https://docs.qgis.org/2.8/en/ (accessed on 1 January 2024).
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- European Commission. Agriculture and Rural Development, Common Agricultural Policy. Available online: https://agriculture.ec.europa.eu/common-agricultural-policy_en#:~:text=The%20CAP%20is%20a%20partnership,27%20commenced%201%20January%202023 (accessed on 1 January 2024).
- Alexandratos, N.; Bruinsma, J. World Agriculture towards 2030/2050: The 2012 Revision; ESA Working Paper 2012 12-03; FAO: Rome, Italy, 2012. [Google Scholar]
- Ecoserdiana. Progetto di Ricerca su Tecnologie di CARatterizzazione Monitoraggio e Analisi per il Ripristino e la Bonifica (CARMA)—Fondo Europeo di Sviluppo Regionale—Por Fesr Sardegna 2014–2020. Available online: https://www.ecoserdiana.com/servizi/progetti-di-ricerca.html (accessed on 1 December 2023).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Flight Name | Date and Time of the Survey | Flying Altitude (m) | Flight Path Pattern | GSD | n GCPs | n Frames (Nadiral) |
|---|---|---|---|---|---|---|---|
| Area 1 | 1 | 14 December 2023 From 11:13:49 to 11:28:22 | 50 | North-South | 1.61 cm/pix | 6 | 118 |
| 2 | 14 December 2023 From 11:34:23 to 11:43:51 | 40 | North-South | 1.14 cm/pix | 6 | 86 | |
| 3 | 14 December 2023 From 11:49:56 to 11:55:42 | 30 | North-South | 0.53 cm/pix | 6 | 59 | |
| Area 2 | a | 3 January 2023 From 10:01:22 to 10:15:22 | 42 | NE-SW | 1.07 cm/pix | 7 | 345 |
| Site | Sensor Size (Pixels) | Focal Length (mm) Full-Frame Equivalent | Pixel Size on the Sensor (µm) |
|---|---|---|---|
| Area 1 | 12 MP | 24 | 2.64 |
| Area 2 | 12.4 MP | 20 | 2.41 |
| Site | Flight Name | n GCPs | SD (cm) (X; Y; Z) | Min; Max Accuracy (cm) X | Min; Max Accuracy (cm) Y | Min; Max Accuracy (cm) Z |
|---|---|---|---|---|---|---|
| Area 1 | 1 | 6 | 1.4; 2.8; 2.3 | −1.2; 2.4 | 0.3; 5.4 | −3.3; 2.9 |
| 2 | 6 | 0.9; 2.5; 6.5 | −0.4; 1.6 | −3.8; 2.8 | −8.5; 1.6 | |
| 3 | 6 | 6.1; 7.9; 7.2 | −9.5; 2.8 | −3.0; 13.3 | −3.0; 11.3 | |
| Area 2 | a | 7 | 1.8; 0.8; 2.2 | −1.8; 4.0 | −1.3; 1.1 | −1.7; 2.2 |
| Site | Flight | N Points | File Size |
|---|---|---|---|
| Area 1 | 1 | 82 million | 2.30 GB |
| 2 | 104 million | 2.52 GB | |
| 3 | 95 million | 2.31 GB | |
| Area 2 | a | 105 million | 2.55 GB |
| Site | Flight | Min (m) | Max (m) | Mean (m) | SD (m) | 50%ile (m) | 90%ile (m) |
|---|---|---|---|---|---|---|---|
| Area 1 | 1 | −1.13 | 0.70 | −0.34 | 0.34 | 0.38 | 0.72 |
| 2 | −1.30 | 1.37 | −0.26 | 0.44 | 0.31 | 0.87 | |
| 3 | −0.42 | 1.46 | 0.14 | 0.28 | 0.16 | 0.49 | |
| Area 2 | a | −1.37 | −0.04 | −0.62 | 0.24 | 0.57 | 0.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vacca, G.; Vecchi, E. UAV Photogrammetric Surveys for Tree Height Estimation. Drones 2024, 8, 106. https://doi.org/10.3390/drones8030106
Vacca G, Vecchi E. UAV Photogrammetric Surveys for Tree Height Estimation. Drones. 2024; 8(3):106. https://doi.org/10.3390/drones8030106
Chicago/Turabian StyleVacca, Giuseppina, and Enrica Vecchi. 2024. "UAV Photogrammetric Surveys for Tree Height Estimation" Drones 8, no. 3: 106. https://doi.org/10.3390/drones8030106
APA StyleVacca, G., & Vecchi, E. (2024). UAV Photogrammetric Surveys for Tree Height Estimation. Drones, 8(3), 106. https://doi.org/10.3390/drones8030106