4.1. Attitude
Mean values indicate that at the beginning of the questionnaire, attitudes toward drones ranged from moderate to positive across all countries (see
Figure 1). The most positive attitude was observed in Poland and the most negative in Austria. A one-way ANOVA revealed an overall significant effect when comparing the mean values of attitude between the six countries (F(5,2724) = 46.6,
p < 0.001, η
p2 = 0.079,
n = 2730). It was a moderate effect with an effect size of f = 0.29. According to the pairwise comparison, Poland (M = 5.64, SD = 1.32) and Spain (M = 5.46, SD = 1.32) differed significantly from every other country (Germany: M = 4.68, SD = 1.55; UK: M = 4.67, SD = 1.51; Czech Republic: M = 4.84, SD = 1.47; Austria: M = 4.54, SD = 1.49). Moreover, there was a significant difference between the Czech Republic (M = 4.84, SD = 1.47) and Austria (M = 4.54, SD = 1.49).
Attitude was measured at the beginning and end of the drone-related section of the questionnaire. The findings revealed a slight increase in almost all countries except Poland and Spain, where a slight decrease could be observed.
A paired
t-test was conducted to analyze whether there was a significant change in attitude in the overall sample. Findings exhibited a significant improvement (t = −6.06,
p < 0.001,
n = 2687) between the first (M = 4.99, SD = 1.50) and the second measurement (M = 5.11, SD = 1.38). The effect size due to Cohen (1988) was d = 0.12, which is a weak effect. Paired
t-tests were also conducted for the single countries, pointing out that attitude significantly improved in the UK, the Czech Republic, and Austria, as well as in the total sample (see
Table 1).
4.2. Use Cases
Mean values related to the approval for various drone use cases suggested two categories of applications with different acceptance levels. The use cases (see
Figure 2), ranging from disaster management to monitoring transport networks and energy supply, were more accepted by people than the use cases ranging from photos and videos for news reports to passenger transport, which were moderately accepted.
Thus, an explorative factor analysis tested their structure to aggregate the items for further analyses. The Bartlett test (χ
2(55) = 16,150.52,
p < 0.001), as well as the Kaiser–Meyer–Olkin Measure of Sampling Adequacy (KMO = 0.919), suggested that the variables were appropriate for using factor analysis. Thus, a PCA with varimax rotation was conducted. The analysis suggested two factors with an eigenvalue bigger than 1.0. Therefore, a two-factor solution was chosen, which explains 66 percent of the variance. Factor 1 was defined as civil and public use cases, and factor 2 was defined as private and commercial use cases (see
Table 2). This is the same structure as the bar chart in
Figure 2 suggests. A reliability analysis indicated a high internal consistency for factors 1 (α = 0.896) and 2 (α = 0.853).
A paired
t-test revealed significant differences (t = 46.31,
p < 0.001,
n = 2572) between public and civil (M = 5.62, SD = 1.24) and private and commercial drone applications (M = 4.53, SD = 1.47) in the total sample. The effect size due to Cohen (1992) was r = 0.91, which is a strong effect. Paired
t-tests were also performed for the individual countries, demonstrating significant differences between the use cases (see
Table 3 and
Figure 3).
A one-way ANOVA further revealed a significant difference for both private and commercial F(5,2638) = 35.7, p < 0.001, ηp2 = 0.063, n = 2644) and public and civil use cases F(5,2766) = 11.5, p < 0.001, ηp2 = 0.020, n = 2772) between the countries. The effect size was moderate for private and commercial (f = 0.26) and small for public and civil use cases (f = 0.14).
In the case of private and commercial use cases, Games–Howell posthoc tests indicated that the mean value in Poland (M = 5.17, SD = 1.31) significantly differed from all other countries (Germany: M = 4.14, SD = 1.58; UK: M = 4.32, SD = 1.43; Spain: M = 4.73, SD = 1.32; Czech Republic; M = 4.62, SD = 1.43; Austria: M = 4.12, SD = 1.46). Spain (M = 4.73, SD = 1.32), and the Czech Republic (M = 4.62, SD = 1.43) significantly differed from Germany (M = 4.14, SD = 1.58), the UK (M = 4.32, SD = 1.43), Poland (M = 5.17, SD = 1.31), and Austria (M = 4.12, SD = 1.46).
In terms of public and civil use cases, Games–Howell posthoc tests showed that the mean values in Germany (M = 5.48, SD = 1.33) and the UK (M = 5.44, SD = 1.26) significantly differed from those in Poland (M = 5.90, SD = 1.17), Spain (M = 5.78, SD = 1.14), and the Czech Republic (M = 5.78, SD = 1.16). Additionally, Austria (M = 5.50, SD = 1.24) significantly differed from Poland (M = 5.90, SD = 1.17), Spain (M = 5.78, SD = 1.14), and the Czech Republic (M = 5.78, SD = 1.16).
4.3. Concerns
Responses related to various drone concerns showed that people were moderately to intensely concerned about the different aspects. The biggest concern was that drones might violate citizens’ privacy or be misused for criminal actions. Participants were least concerned about drone noises (see
Figure 4).
All concern-related items were aggregated to one scale by calculating mean values for further analyses. Mean values for the different countries revealed the highest level of concern in Germany and the UK and the lowest in Poland (see
Figure 5).
A one-way ANOVA revealed an overall significant effect when comparing the mean values of the concern scale between the six countries (F(5,2608) = 12.9, p < 0.001, ηp2 = 0.024, n = 2614). It was a small effect with an effect size of f = 0.16. Games–Howell posthoc tests indicate significant differences between Poland (M = 4.40, SD = 1.36) and Germany (M = 4.94, SD = 1.19), UK (M = 4.96, SD = 1.24), Spain (M = 4.84, SD = 1.20), and Austria (M = 4.85, SD = 1.17). Furthermore, there are significant differences between the Czech Republic (M = 4.63, SD = 1.25) and Germany (M = 4.94, SD = 1.19) and the UK (M = 4.96, SD = 1.24).
Concern-related statements from the open response format were analyzed according to the frequency of content-bearing keywords.
Figure 6 visualizes the outcome in a word cloud. It involves the results from the entire sample. The five most common concern-related words of each subsample are shown in
Table 4. The word privacy was mentioned most often across all countries. The results are consistent with the findings from the previous analysis, which indicates privacy concerns and concerns about criminal abuse are most important.
The relative frequency of people with no concerns was 28% for the whole sample.
Table 5 shows the relative frequencies of participants without concerns for each country. According to the findings, Poland and the UK had the highest number of respondents without concerns, whereas the Czech Republic had the lowest.
4.4. Flying Area and Flight Altitude
Mean values for flight areas where drone operations are acceptable showed that drone flights are most favorable in uninhabited regions. Only in this category were responses rather positive. The acceptance of flights over sparsely populated areas and small towns was moderate, whereas it dropped into the negative scale range for medium-sized and big cities (see
Figure 7).
As drone operations in big cities are unfavorable, the acceptance of flights in various city areas was moderate to negative (
Figure 8). In cities, flights were most tolerable in industrial parks and recreational areas, whereas they were less acceptable in city centers and housing areas.
According to relative frequencies of tolerable minimum flight altitudes for different drone applications, drones used for public functions can fly at lower altitudes of up to 20 m, which was acceptable to 50% of participants. In comparison, fewer people would tolerate such altitudes for private or commercial uses (see
Figure 9).
The results of a Friedman test revealed that the tolerated minimum flight altitude significantly differed between the three fields of use (ꭓ2 (2) = 141.39, p < 0.001, n = 2183). Lower altitudes were acceptable for drones with public functions, followed by privately used drones. Commercial drones should fly at high altitudes. According to a Dunn–Bonferroni posthoc test there were significant differences between public and private drones (z = 0.13, p < 0.001, Cohen’s r = 0.00), public and commercial drones (z = 0.30, p = < 0.001, Cohen’s r = 0.01), as well as between private and commercial drones (z = −0.18, p < 0.001, Cohen’s r = 0.00). However, the effect sizes mentioned show that this was an extremely weak effect. For each field of usage, 20 percent or more of the participants chose the “Don’t know” option. Thus, they were not considered in the Friedman test.
A look at the total frequencies was taken to see if the number of participants who chose the “Don’t know” option was associated with drone experience. The frequencies are presented in
Table 6. In all categories (drones with public, commercial, and private functions), it appears that within the group of participants with no experience, there was the highest number of individuals who chose “Don’t know” (around 40% in each category) compared to the groups of participants with first- or second-hand experience.
4.5. Impact of Demographic and Personal Attributes on Acceptance
A random forest analysis was conducted for four target variables, each involving eight predicting features. The correlation matrix in
Figure 10 shows that none of the factors in the model correlate too highly with each other, as all coefficients are below 0.8.
In each model’s first step, a 10-fold cross-validation was performed, followed by hyperparameter optimization to increase the model performance.
Table 7 provides an overview of each random forest analysis’s selected parameters, model performance, and sample size. The sample sizes differ because missing values were removed beforehand. The hyperparameters involved the maximum depth of the regression trees, the number of trees (estimators), and the minimum sample split. The selected hyperparameters resulting in the lowest RMSE, and thus being used for building the random forest, are shown. The out-of-bag (OOB) accuracy indicates the correct predictions and is a metric for the model performance. Its values range between 0 and 1. The OOB values indicate that more than 80% of the predictions were made correctly in each model.
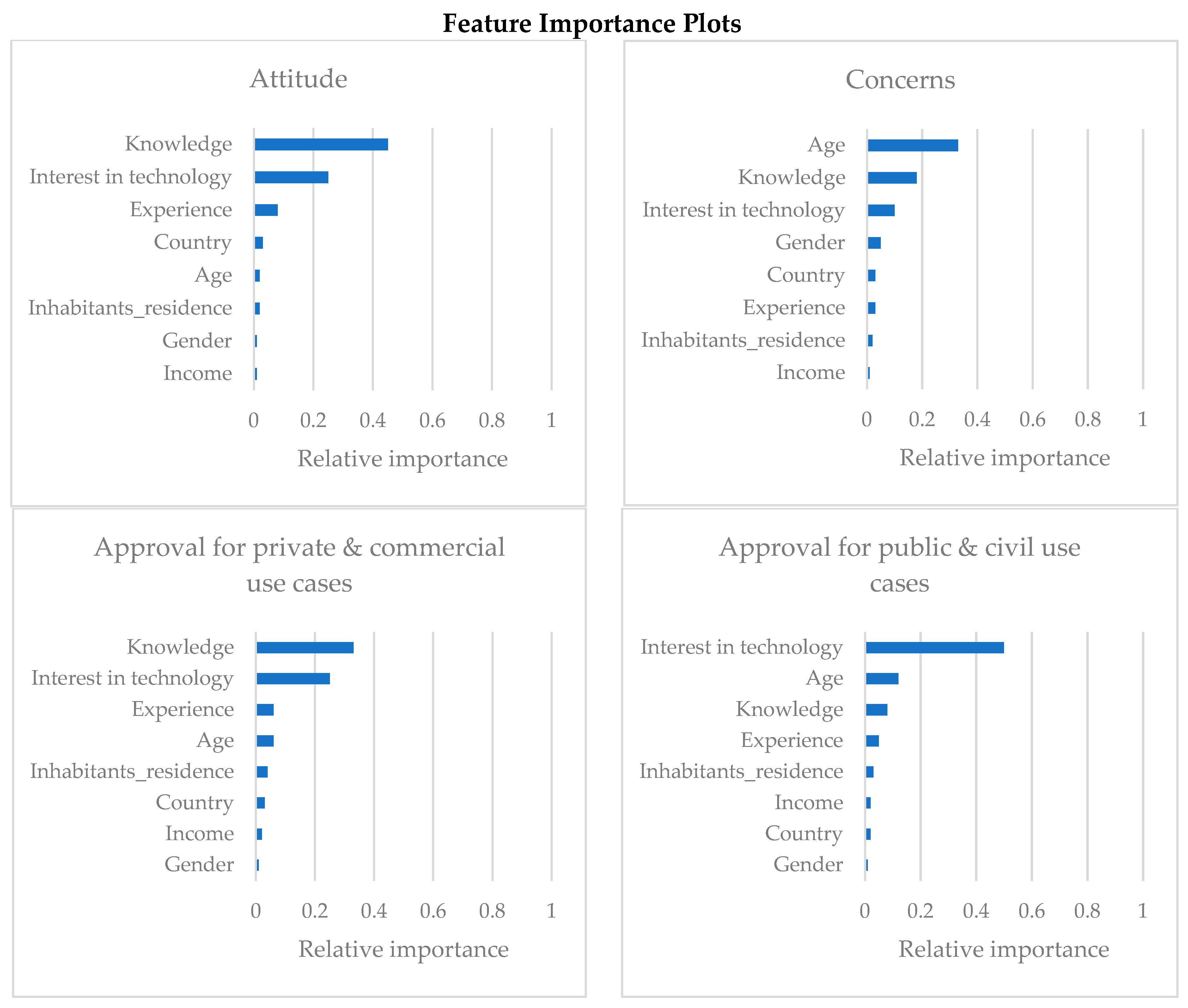
The outcome of the random forest analyses is presented in Feature Importance (
Figure 11) and Partial Dependence Plots (
Figure 12).
The Feature Importance Plots show how important each feature is for predicting the target variable. In the models referring to the attitude toward drones and the approval for private and commercial use cases, knowledge about drones had the most substantial impact, followed by general interest in technology. In case of public and civil use cases, technology interest was the dominant influence. Regarding concerns related to drones, age was the feature with the highest importance.
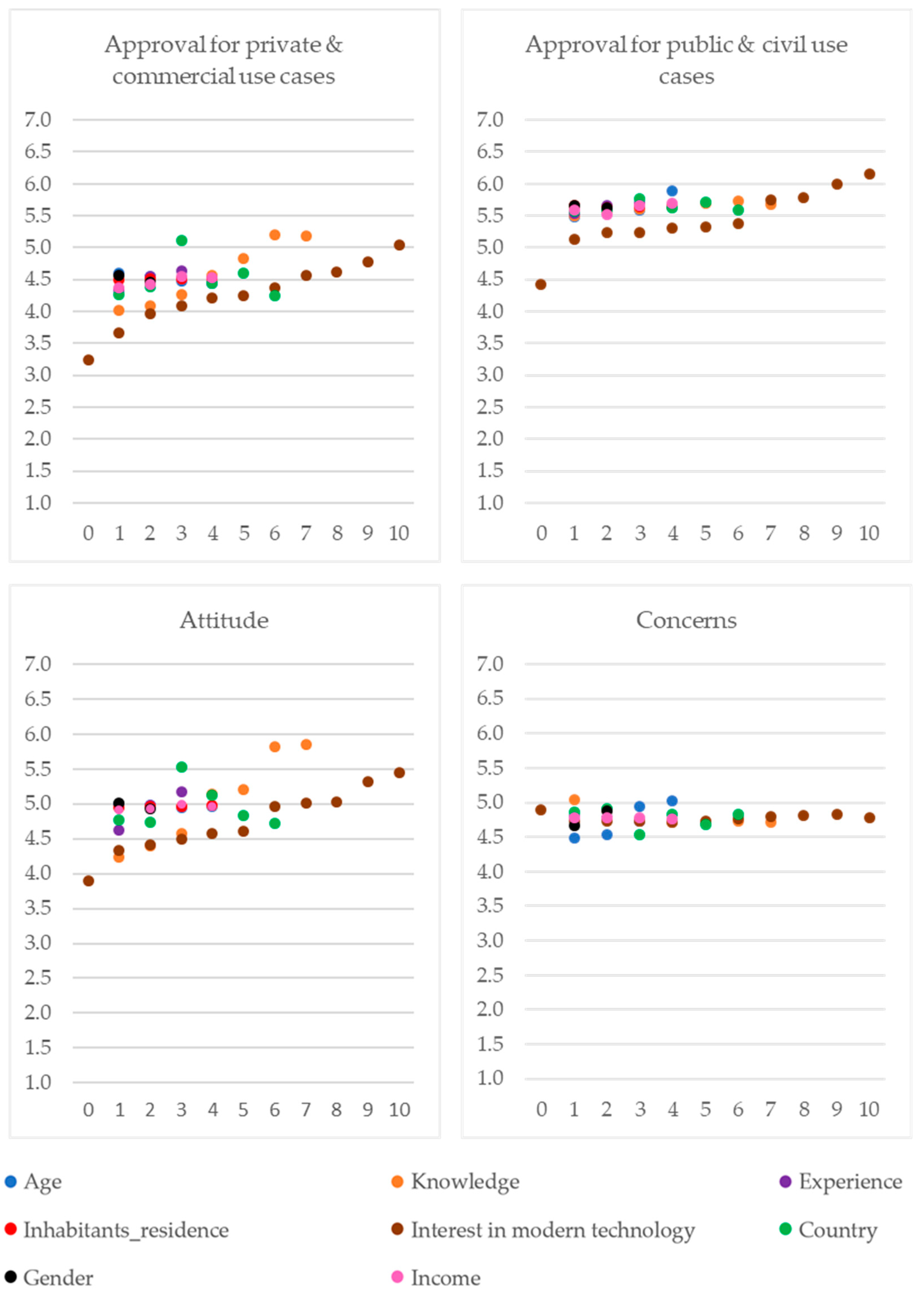
The Partial Dependence Plots present the predicted values of the target variable for each feature category. As the categories are shown as numeric values, the plots’ interpretation is guided by
Table 8. It lists the variable names and their categories as numeric and string values. The percentage of people in the sample is also given for categorical and ordinal variables.
Referring to the target variables attitude and approval for private and commercial use cases, as with the feature importance plots, the importance of knowledge and also interest in technologies is visible here. Both target variables gradually became more positive when people were more informed about drones or the more they were interested in modern technologies in general. There were also differences in the predictions for the country. As was already seen in the results in
Section 4.3 and
Section 4.4, the predicted values for Poland were noticeably more positive than for the other countries. Spain also reached higher values than the other countries, but the predictions were not as high as for Poland. More experience with drones led to a somewhat more positive attitude as well. The predicted values of the other features, however, differed little.
Similar observations can be made regarding concerns and approval for public and civil use cases. In particular, approval for private and commercial use cases also became more positive as interest in modern technologies increased. Still, the range of differences between the values of all other features was smaller than for the other target variables. Here, the predictions for the individual variables seemed to differ significantly less from one another. Regarding concerns, the fluctuations were most vigorous for the variable age, which aligns with the results presented in Feature Importance Plots.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}