
Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards



Abstract
:1. Introduction
2. Materials and Methods
2.1. DJI Matrice 600 and Spray System
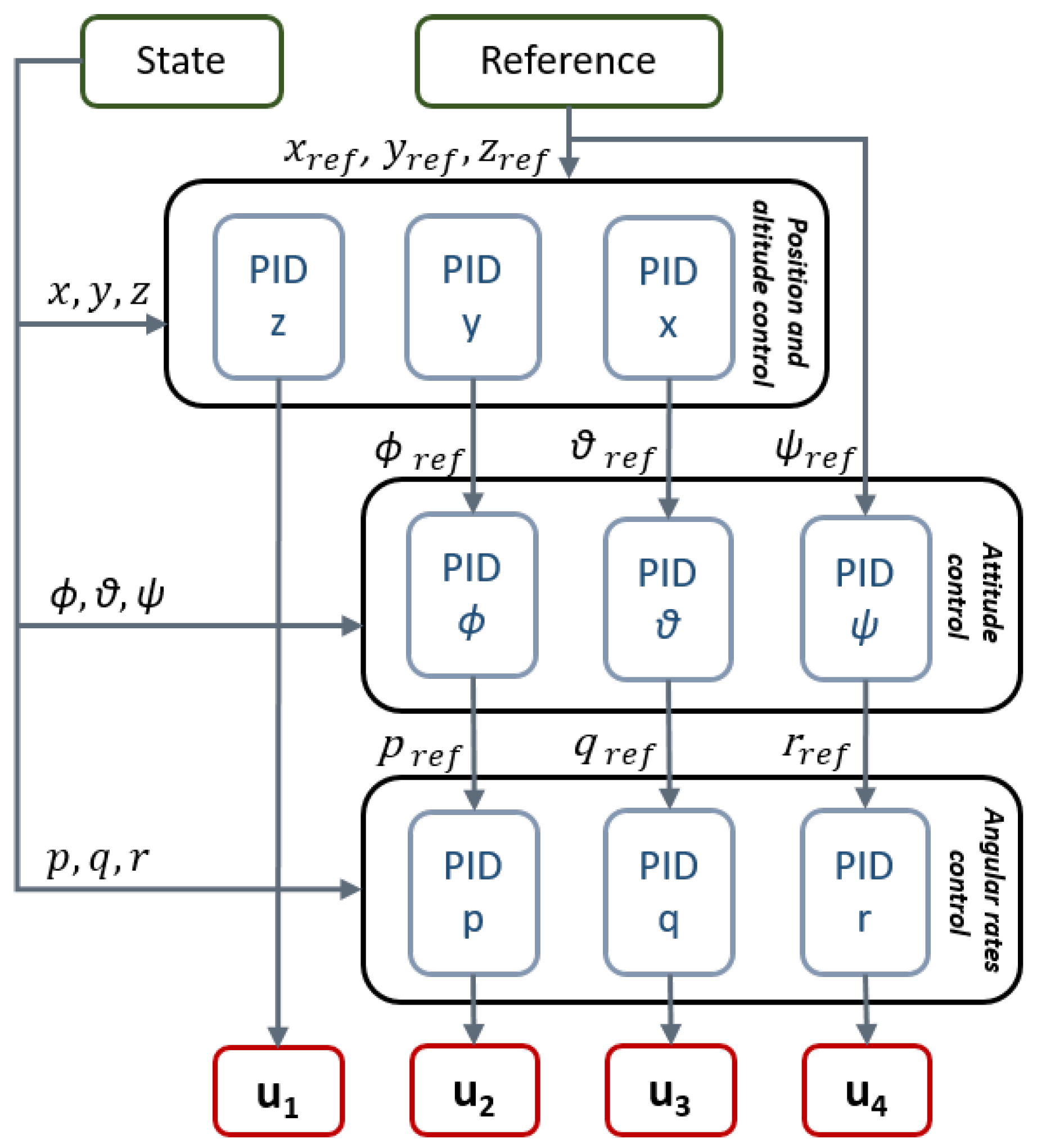
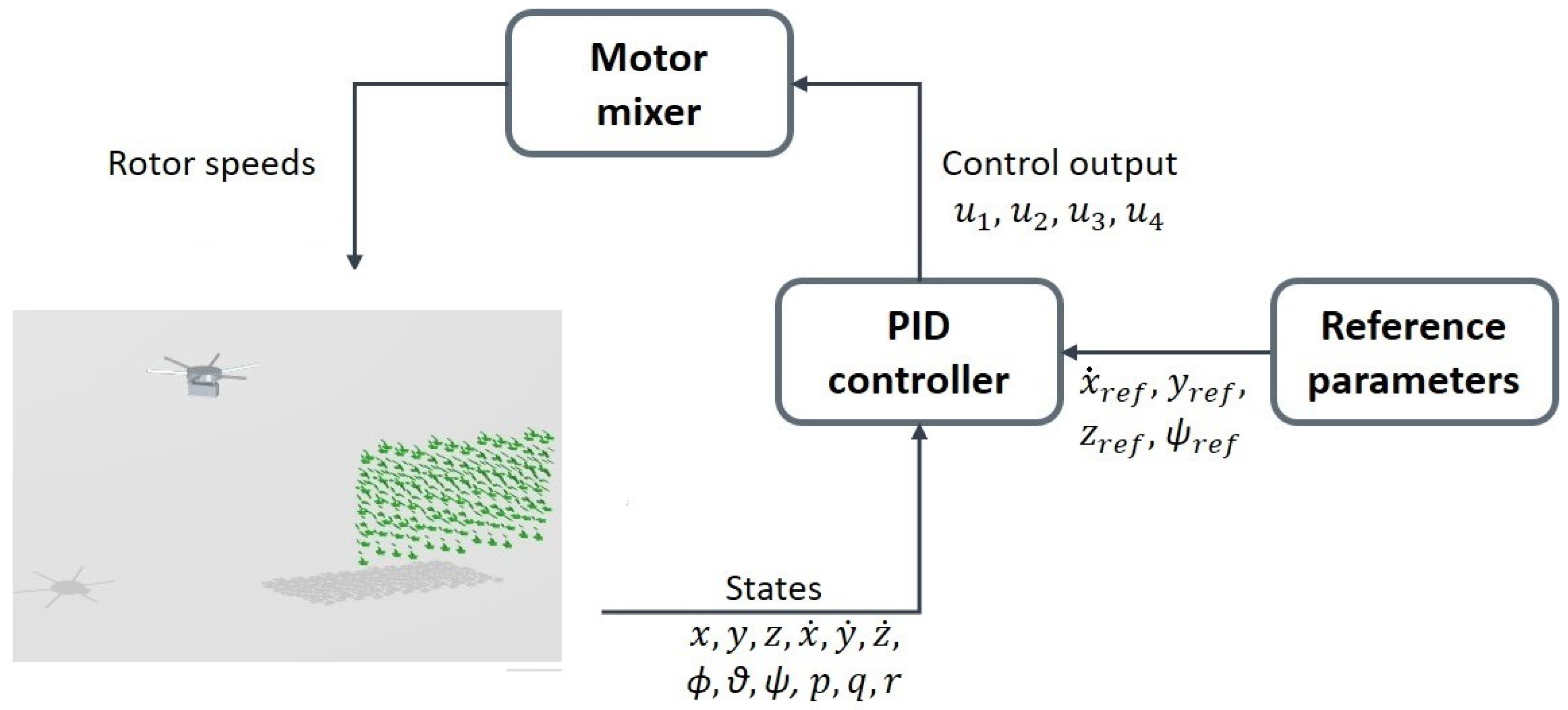
2.2. Hexacopter Dynamics and Control
2.3. Virtual Vineyard
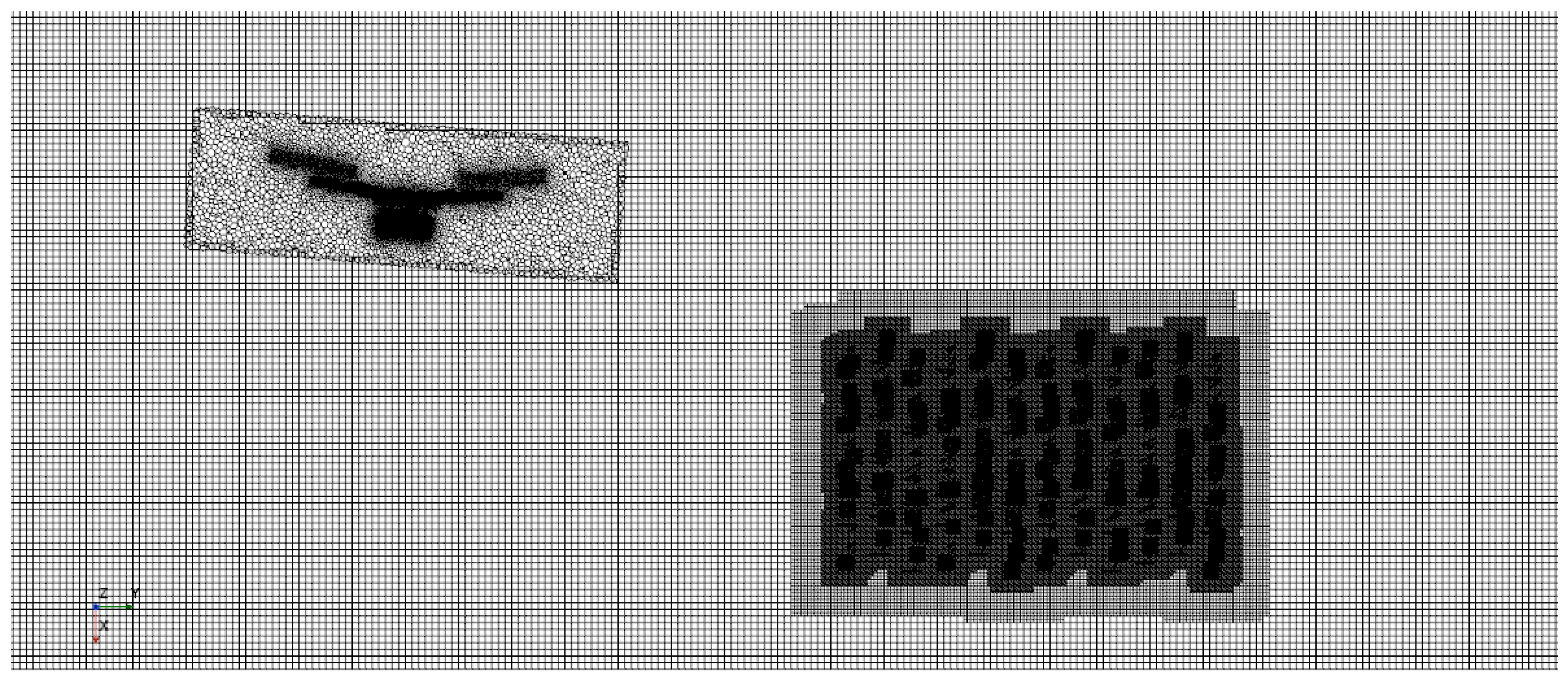
2.4. CFD Model
2.5. Spray Model
2.6. Sloshing Model
3. Results and Analysis
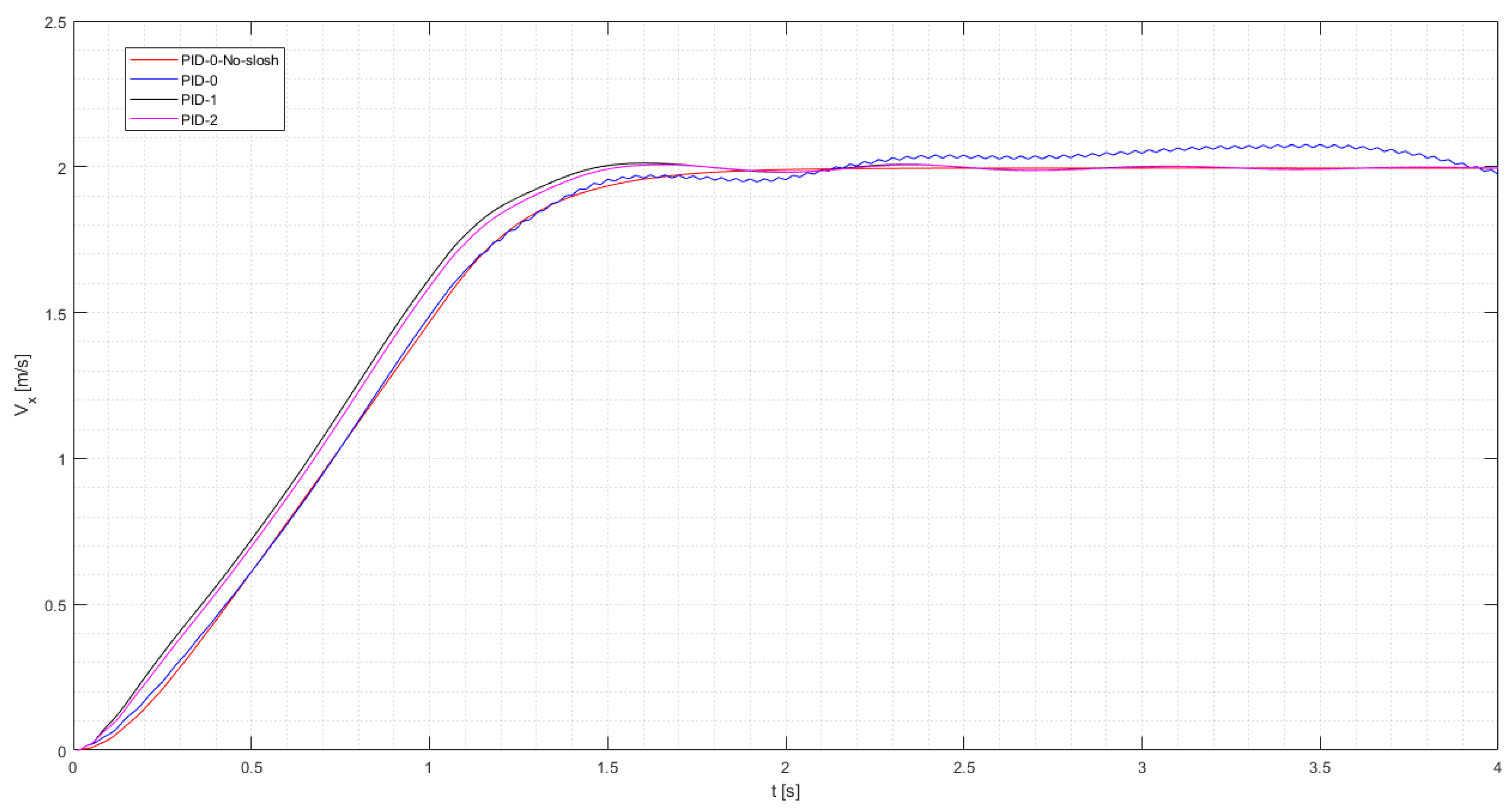
3.1. Hexacopter Dynamics Verification and Gain Scheduling
3.2. Droplet Deposition Analysis
4. Conclusions and Future Works
- The 40-degree hollow cone nozzles present improved efficiencies compared to the 80-degree hollow cone nozzles independent of the positions and orientation.
- The ground deposition reveals a laterally asymmetric distribution depending on the rotor handedness. This could be a relevant effect to consider for the development of adaptive path-planning strategies that might not fly in the middle of the vineyard and could also include the effect of crosswind.
- The rear rotor presents a much smaller lateral dispersion. The more vertical wake allows more momentum from the wake to be communicated to the particles reducing the ground imprint. Considering that PPPs are typically harmful, this is an interesting advantage compared to the leading rotor location, especially in the presence of crosswinds.
- In the tested case, the wake-compliant orientation of the nozzle increased the efficiency of the operation and reduced the lateral dispersion, showing that there is still room for the reduction of the spray drift and demonstrating that the downwash of the rotors has a positive effect on spray drift.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAS | Unmanned Aerial System |
| UASS | Unmanned Aerial Spraying System |
| CFD | Computational Fluid Dynamics |
| PA | Precision Agriculture |
| DPM | Dispersed Phase Model |
| RBF | Radial Basis Functions |
| VOF | Volume Of Fluid |
| MTOW | Maximum Take-Off Weight |
| URANS | Unsteady Reynolds-Averaged Navier–Stokes |
| CSF | Continuum Surface Force |
| CFL | Courant Friedrich Levy |
| CAD | Computer-Aided Design |
| PPP | Plant Protection Product |
| GPS | Global Positioning system |
References
- Nuyttens, D.; Baetens, K.; De Schampheleire, M.; Sonck, B. Effect of nozzle type, size and pressure on spray droplet characteristics. Biosyst. Eng. 2007, 97, 333–345. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Deng, X.; Cheng, S. Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Han, X.; Chen, S.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total Environ. 2020, 737, 139793. [Google Scholar] [CrossRef] [PubMed]
- Djouhri, M.; Loubet, B.; Bedos, C.; Dages, C.; Douzals, J.P.; Voltz, M. ADDI-Spraydrift: A comprehensive model of pesticide spray drift with an assessment in vineyards. Biosyst. Eng. 2023, 231, 57–77. [Google Scholar] [CrossRef]
- Meng, Y.; Su, J.; Song, J.; Chen, W.H.; Lan, Y. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron. Agric. 2020, 170, 105282. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Li, X.; Giles, D.K.; Niederholzer, F.J.; Andaloro, J.T.; Lang, E.B.; Watson, L.J. Evaluation of an unmanned aerial vehicle as a new method of pesticide application for almond crop protection. Pest Manag. Sci. 2021, 77, 527–537. [Google Scholar] [CrossRef]
- Sarri, D.; Martelloni, L.; Rimediotti, M.; Lisci, R.; Lombardo, S.; Vieri, M. Testing a multi-rotor unmanned aerial vehicle for spray application in high slope terraced vineyard. J. Agric. Eng. 2019, 50, 38–47. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Sci. Total Environ. 2022, 845, 157292. [Google Scholar] [CrossRef]
- Zhan, Y.; Chen, P.; Xu, W.; Chen, S.; Han, Y.; Lan, Y.; Wang, G. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution. Biosyst. Eng. 2022, 216, 32–45. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, S.; Wang, G.; Lan, Y. Drift Evaluation of a Quadrotor Unmanned Aerial Vehicle (UAV) Sprayer: Effect of Liquid Pressure and Wind Speed on Drift Potential Based on Wind Tunnel Test. Appl. Sci. 2021, 11, 7258. [Google Scholar] [CrossRef]
- Carreño Ruiz, M.; Bloise, N.; Guglieri, G.; D’Ambrosio, D. Numerical Analysis and Wind Tunnel Validation of Droplet Distribution in the Wake of an Unmanned Aerial Spraying System in Forward Flight. Drones 2022, 6, 329. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, T.; Song, C.; Yu, X.; Shan, C.; Gu, H.; Lan, Y. Evaluation of Spray Drift of Plant Protection Drone Nozzles Based on Wind Tunnel Test. Agriculture 2023, 13, 628. [Google Scholar] [CrossRef]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of unmanned aerial spraying systems and related spray drift: A review. Front. Plant Sci. 2022, 13, 870956. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Qi, L.; Wu, Y.; Musiu, E.M.; Cheng, Z.; Wang, P. Numerical simulation of airflow field from a six–rotor plant protection drone using lattice Boltzmann method. Biosyst. Eng. 2020, 197, 336–351. [Google Scholar] [CrossRef]
- Yang, F.; Xue, X.; Cai, C.; Sun, Z.; Zhou, Q. Numerical simulation and analysis on spray drift movement of multirotor plant protection unmanned aerial vehicle. Energies 2018, 11, 2399. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Ning, Z.; Lan, Y.; Yin, X.; Zhang, J.; Ge, Y. Numerical analysis and validation of spray distributions disturbed by quad-rotor drone wake at different flight speeds. Comput. Electron. Agric. 2019, 166, 105036. [Google Scholar] [CrossRef]
- Wang, L.; Xu, M.; Hou, Q.; Wang, Z.; Lan, Y.; Wang, S. Numerical verification on influence of multi-feature parameters to the downwash airflow field and operation effect of a six-rotor agricultural UAV in flight. Comput. Electron. Agric. 2021, 190, 106425. [Google Scholar] [CrossRef]
- Lefebvre, A.H.; McDonell, V.G. Atomization and Sprays; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Di Martino, M.; Ahirwal, D.; Maffettone, P.L. Three-dimensional computational fluid dynamics simulation of the hollow-cone spray process: The stability of the conical liquid sheet. Phys. Fluids 2021, 33, 063301. [Google Scholar] [CrossRef]
- Laurila, E.; Roenby, J.; Maakala, V.; Peltonen, P.; Kahila, H.; Vuorinen, V. Analysis of viscous fluid flow in a pressure-swirl atomizer using large-eddy simulation. Int. J. Multiph. Flow 2019, 113, 371–388. [Google Scholar] [CrossRef]
- Feng, H.; Xu, P.; Yang, S.; Zheng, Y.; Li, W.; Liu, W.; Zhao, H.; Jiang, S. Back Pressure Generated by Downwash and Crosswind on Spatial atomization characteristics during UAV Spraying: CFD Analysis and Verification. Pest Manag. Sci. 2023, 80, 1348–1360. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Zhang, J.; Zhang, C.; Zhou, H.; Jiang, X.; Yang, F.; Wang, Y. CFD analysis and RBFNN-based optimization of spraying system for a six-rotor unmanned aerial vehicle (UAV) sprayer. Crop Prot. 2023, 174, 106433. [Google Scholar] [CrossRef]
- Surico, P.; Bloise, N.; Primatesta, S.; Guglieri, G. Design and Stability Analysis of an Agricultural Sprayer UAS Integrated with an Anti-Sloshing Tank. In Proceedings of the 2023 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Pisa, Italy, 6–8 November 2023; pp. 378–383. [Google Scholar]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Carreño Ruiz, M.; Bloise, N.; Capello, E.; D’Ambrosio, D.; Guglieri, G. Assessment of Quadrotor PID Control Algorithms using six-Degrees of Freedom CFD simulations. In Proceedings of the 2022 61st IEEE Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022. [Google Scholar]
- Bloise, N.; Carreño Ruiz, M.; D’Ambrosio, D.; Guglieri, G. Wind Tunnel Testing of Remotely Piloted Aircraft Systems for Precision Crop-Spraying Applications. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento and Bolzano, Italy, 3–5 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 378–383. [Google Scholar]
- Biglia, A.; Comba, L.; Alcatrão, L.E.; Sopegno, A.; Messina, C.; Mozzanini, E.; Bloise, N.; Guglieri, G.; Grella, M. Comparison between 60° and 30° hollow cone nozzles for targeted UAV-spray applications in vineyards. In Precision Agriculture’23; Wageningen Academic Publishers: Wageningen, The Netherlands, 2023; pp. 67–73. [Google Scholar]
- Becce, L.; Bloise, N.; Guglieri, G. Optimal Path Planning for Autonomous Spraying UAS framework in Precision Agriculture. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 698–707. [Google Scholar]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992. [Google Scholar]
- Jin, S.; Peng, H.; Qiu, W.; Oldfield, C.; Stockdill, B. Best modeling practice for self-propulsion simulation of ship model in calm water. Phys. Fluids 2023, 35, 105129. [Google Scholar] [CrossRef]
- Pantel, H.; Falissard, F.; Dufour, G. Assessment of Reynolds-Averaged Navier–Stokes/Blade Element Theory Body Force Method for Propeller Modeling. AIAA J. 2023, 62, 758–775. [Google Scholar] [CrossRef]
- Kiffer, T.; Dufour, G.; Gojon, R.; Thollet, W.; López de Vega, L. Extension and validation of the Body Force Method to a propeller blade. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023; p. 3378. [Google Scholar]
- Carreño Ruiz, M. Numerical Simulation and Aerodynamic Design of Small-Scale Rotary-Wing for Unmanned Aerial Systems in Terrestrial and Martian Applications. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2023. Available online: https://hdl.handle.net/11583/2982720 (accessed on 1 January 2024).
- Schiller, L. Über die grundlegenden Berechnungen bei der Schwerkraftaufbereitung. Z. Vereines Dtsch. Inge. 1933, 77, 318–321. [Google Scholar]
- Sommerfeld, M. Theoretical and experimental modelling of particulate flows. VKI Lect. Ser. 2000, 6, 3–7. [Google Scholar]
- Bloise, N. Design of an Innovative Spraying System for High Precision Aerial Dispersion in Vineyards. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2023. Available online: https://hdl.handle.net/11583/2986291 (accessed on 1 January 2024).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters Description | Value |
|---|---|
| Wheelbase | 1133 mm |
| Rotor diameter | 533 mm |
| Rotor pitch | 127 mm |
| Number of rotors | 6 |
| Brushless motor | DJI 6010 |
| Angle [deg] | Rotor | Orientation | On-Target Deposition [Liters] | Spray Volume [Liters] | Efficiency [%] |
|---|---|---|---|---|---|
| 40 | Leading | Modified | 0.00694 | 0.0129 | 53.8 |
| 40 | Leading | Normal | 0.00614 | 0.0129 | 47.6 |
| 80 | Leading | Modified | 0.00400 | 0.0129 | 31.0 |
| 40 | Rear | Normal | 0.00614 | 0.0129 | 47.6 |
| 80 | Rear | Normal | 0.00433 | 0.0129 | 33.5 |
| 40 | Both | Modified | 0.01308 | 0.0258 | 50.7 |
| 80 | Both | Normal | 0.00830 | 0.0258 | 32.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carreño Ruiz, M.; Bloise, N.; Guglieri, G.; D’Ambrosio, D. Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards. Drones 2024, 8, 98. https://doi.org/10.3390/drones8030098
Carreño Ruiz M, Bloise N, Guglieri G, D’Ambrosio D. Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards. Drones. 2024; 8(3):98. https://doi.org/10.3390/drones8030098
Chicago/Turabian StyleCarreño Ruiz, Manuel, Nicoletta Bloise, Giorgio Guglieri, and Domenic D’Ambrosio. 2024. "Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards" Drones 8, no. 3: 98. https://doi.org/10.3390/drones8030098
APA StyleCarreño Ruiz, M., Bloise, N., Guglieri, G., & D’Ambrosio, D. (2024). Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards. Drones, 8(3), 98. https://doi.org/10.3390/drones8030098