
A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements




Abstract
:1. Introduction
- The model should be a spatiotemporal model, and therefore, be capable of predicting changes in chemical concentrations in both space and time.
- The model should also be a control-theoretic or parametric model since it is required for our model-based controller.
- The model should require limited data for learning since it is very difficult to obtain wildfire chemical data to learn a data-driven model.
- Finally, the model should be computationally inexpensive since it must be computed onboard the UAVs using limited computational resources.
2. Materials and Methods
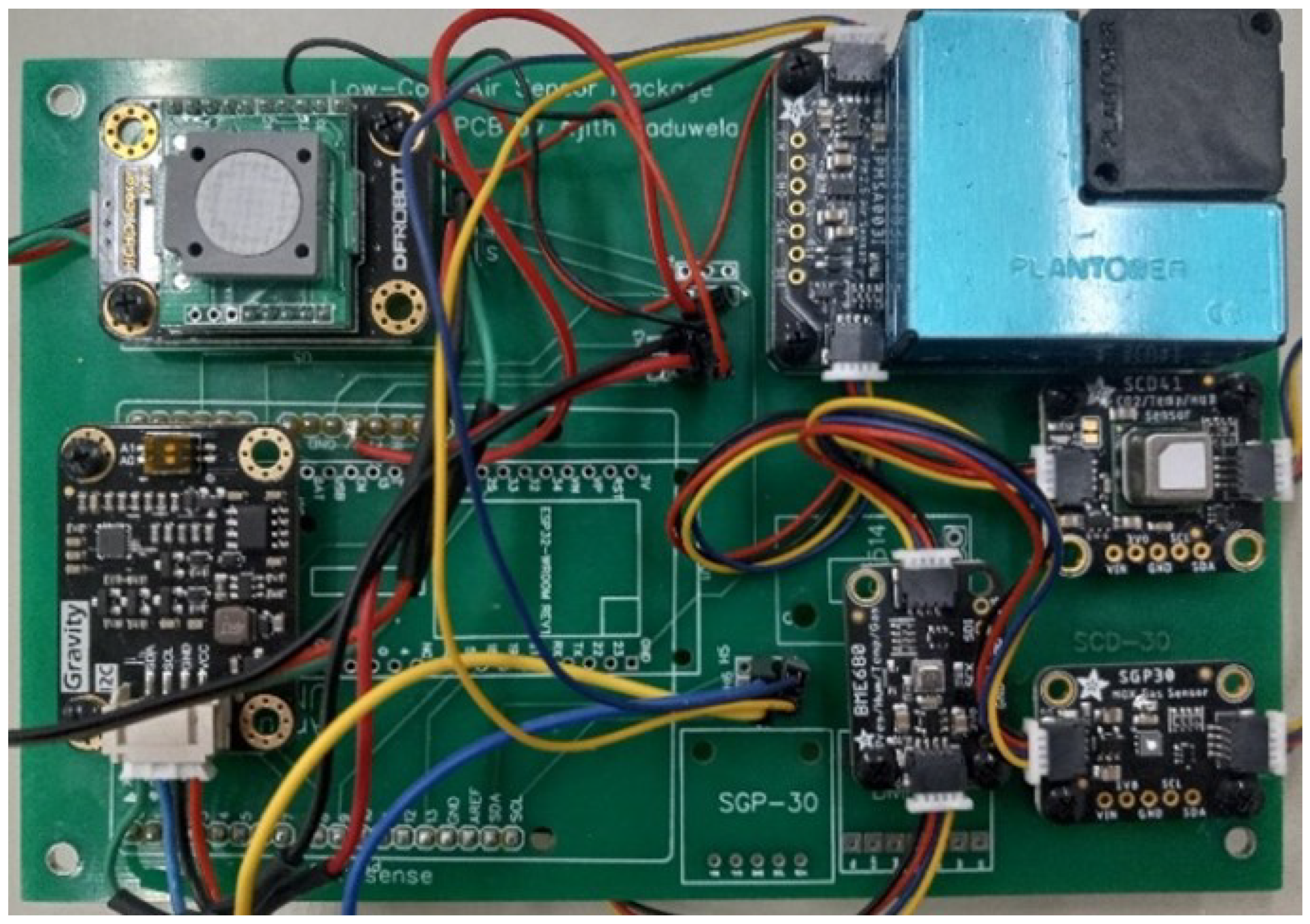
2.1. UAV Platform and Air Quality Sensor Package
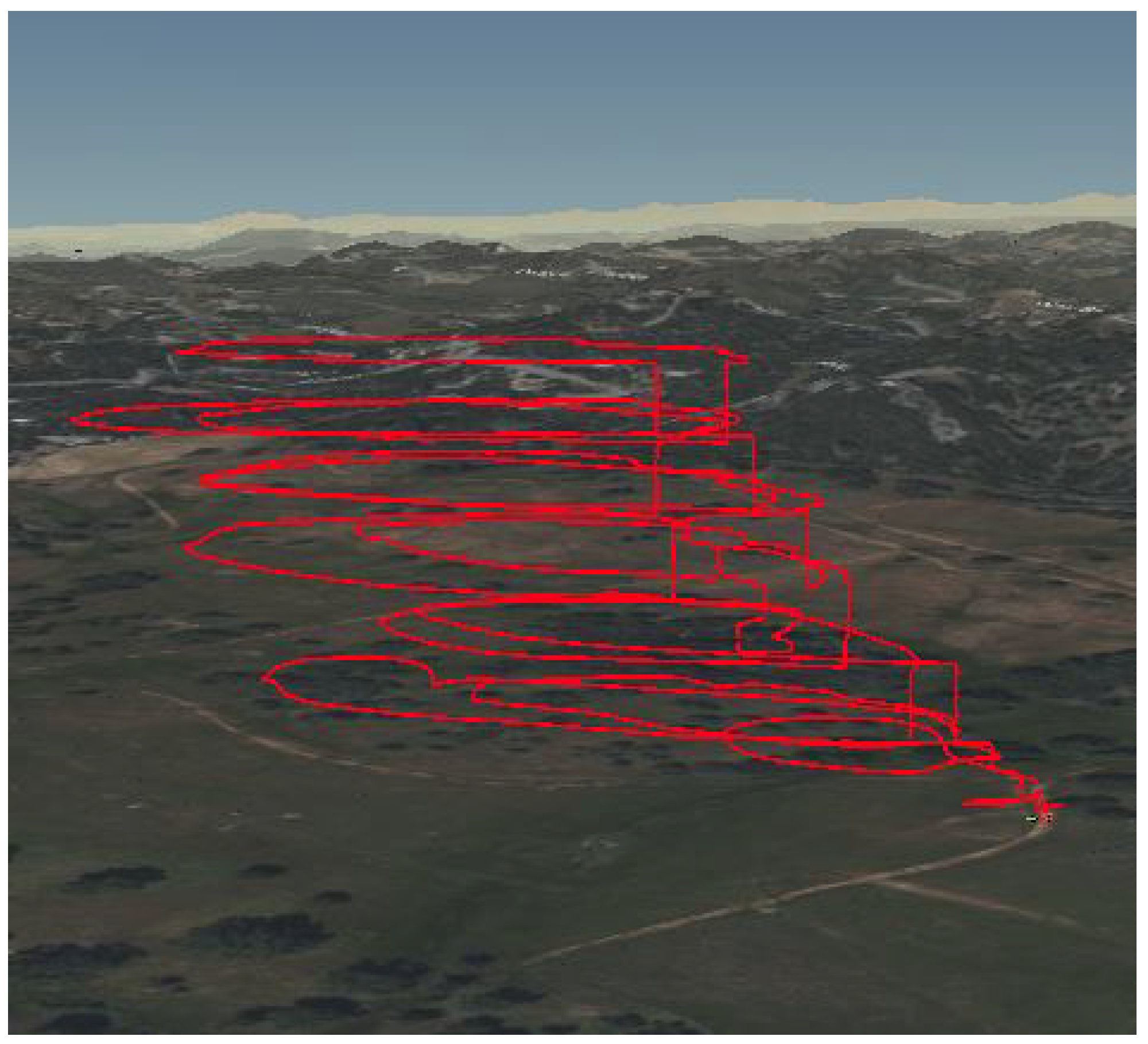
2.2. Chemical Data Collection
- (1)
- Use one mobile sensing robot where the robot must stop at each waypoint for more than one time step to collect data at that point.
- (2)
- Use one mobile sensing robot and one static reference sensor where the mobile sensor can continuously move while collecting data and the static sensor continuously collects data at a specific location within the field being sampled. For this to work, the static sensor must be the same as the mobile sensor and both must be synchronized in time.
- (3)
- Use multiple mobile robots where all robots start at different waypoints but follow the same trajectory such that if one robot collects data at a specific waypoint at the current time step, another robot will collect measurements at that waypoint in the future time step.
2.3. Spatio-Temporal Modelling
2.4. Learning the Spatiotemporal Model from Data
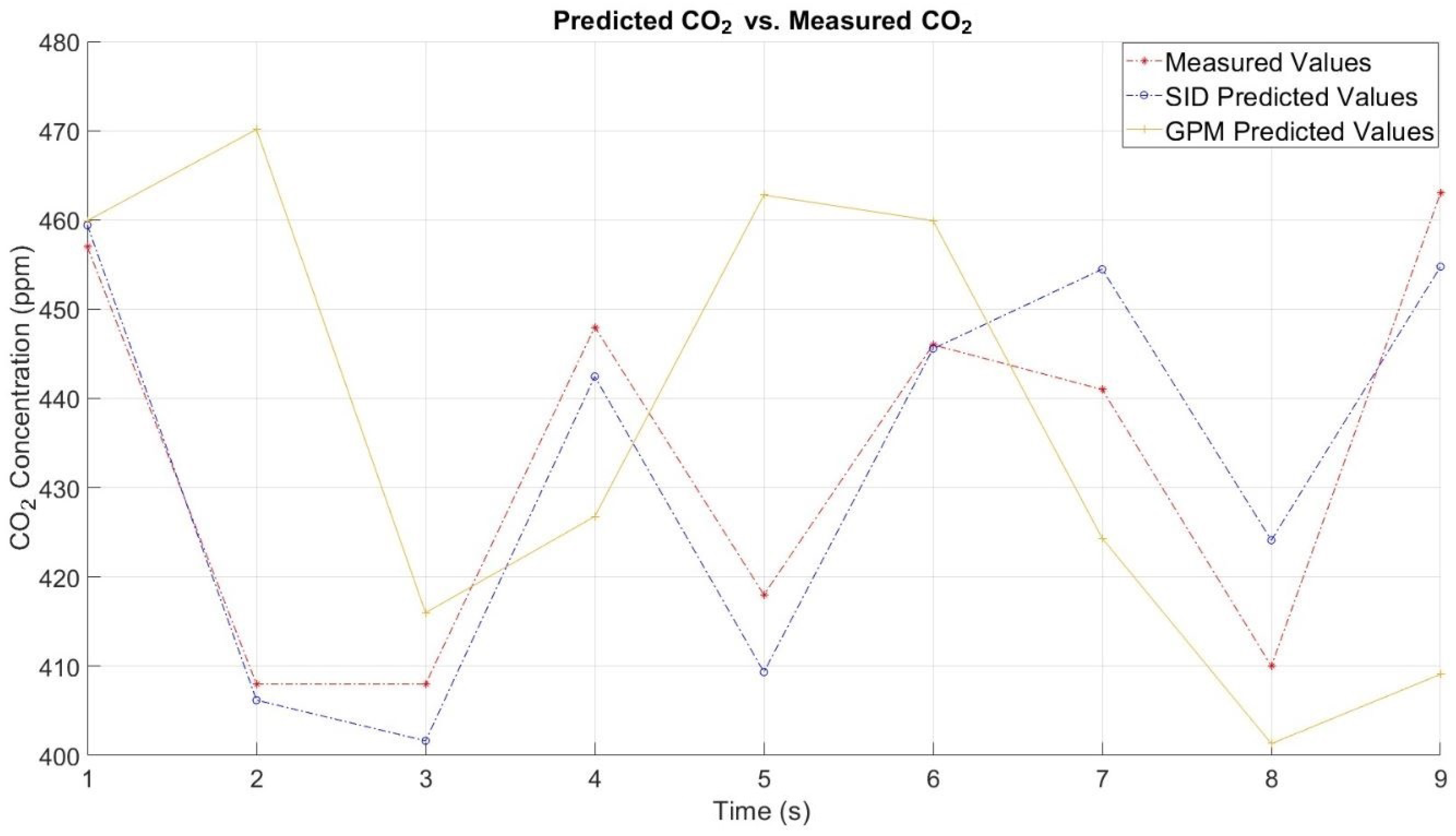
2.5. Comparison with Existing Model
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| VOC | Volatile Organic Compound |
| SID | Subspace Identification |
| GPM | Gaussian Puff Model |
| MAE | Mean Absolute Error |
| RMSE | Root Mean Squared Error |
| ppm | Parts Per Million |
| CAL FIRE | California Department of Forestry and Fire Protection |
| CARB | California Air Resources Board |
References
- Sullivan, A.L. Wildland surface fire spread modelling, 1990–2007. 2: Empirical and quasi-empirical models. Int. J. Wildland Fire 2009, 18, 369–386. [Google Scholar] [CrossRef]
- ALERTCalifornia. Available online: https://alertcalifornia.org/ (accessed on 27 March 2024).
- EOSDIS Worldview. Available online: https://worldview.earthdata.nasa.gov/ (accessed on 27 March 2024).
- Jain, P.; Coogan, S.C.; Subramanian, S.G.; Crowley, M.; Taylor, S.; Flannigan, M.D. A review of machine learning applications in wildfire science and management. Environ. Rev. 2020, 28, 478–505. [Google Scholar] [CrossRef]
- Bailon-Ruiz, R.; Lacroix, S. Wildfire remote sensing with UAVs: A review from the autonomy point of view. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; IEEE: Piscateville, NJ, USA, 2020; pp. 412–420, ISBN 9781728142784. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Taberkit, A.M.; Kechida, A. A review on early wildfire detection from unmanned aerial vehicles using deep learning-based computer vision algorithms. Signal Process. 2022, 190, 108309. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total. Environ. 2020, 748, 141172. [Google Scholar] [CrossRef] [PubMed]
- Maqbool, A.; Mirza, A.; Afzal, F.; Shah, T.; Khan, W.Z.; Zikria, Y.B.; Kim, S.W. System-Level Performance Analysis of Cooperative Multiple Unmanned Aerial Vehicles for Wildfire Surveillance Using Agent-Based Modeling. Sustainability 2022, 14, 5927. [Google Scholar] [CrossRef]
- Ragbir, P.; Kaduwela, A.; Passovoy, D.; Amin, P.; Ye, S.; Wallis, C.; Alaimo, C.; Young, T.; Kong, Z. UAV-Based Wildland Fire Air Toxics Data Collection and Analysis. Sensors 2023, 23, 3561. [Google Scholar] [CrossRef]
- Reid, C.E.; Brauer, M.; Johnston, F.H.; Jerrett, M.; Balmes, J.R.; Elliott, C.T. Critical Review of Health Impacts of Wildfire Smoke Exposure. Environ. Health Perspect. 2016, 124, 1334–1343. [Google Scholar] [CrossRef] [PubMed]
- Ford, B.; Val Martin, M.; Zelasky, S.E.; Fischer, E.V.; Anenberg, S.C.; Heald, C.L.; Pierce, J.R. Future Fire Impacts on Smoke Concentrations, Visibility, and Health in the Contiguous United States. GeoHealth 2018, 2, 229–247. [Google Scholar] [CrossRef] [PubMed]
- Larsen, A.E.; Reich, B.J.; Ruminski, M.; Rappold, A.G. Impacts of fire smoke plumes on regional air quality, 2006–2013. J. Expo. Sci. Environ. Epidemiol. 2018, 28, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Fann, N.; Alman, B.; Broome, R.A.; Morgan, G.G.; Johnston, F.H.; Pouliot, G.; Rappold, A.G. The health impacts and economic value of wildland fire episodes in the U.S.: 2008–2012. Sci. Total. Environ. 2018, 610–611, 802–809. [Google Scholar] [CrossRef] [PubMed]
- Cascio, W.E. Wildland fire smoke and human health. Sci. Total. Environ. 2018, 624, 586–595. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Heilman, W.E.; Potter, B.E.; Clements, C.B.; Jackson, W.A.; French, N.H.F.; Goodrick, S.L.; Kochanski, A.K.; Larkin, N.K.; Lahm, P.W.; et al. Smoke Plume Dynamics. In Wildland Fire Smoke in the United States: A Scientific Assessment; Peterson, D.L., McCaffrey, S.M., Patel-Weynand, T., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 83–119. ISBN 9783030870454. [Google Scholar] [CrossRef]
- Zannetti, P. The Tool—Mathematical Modeling. In Air Pollution Modeling: Theories, Computational Methods and Available Software; Zannetti, P., Ed.; Springer: Boston, MA, USA, 1990; pp. 27–40. ISBN 9781475744651. [Google Scholar] [CrossRef]
- Johnson, J.B. An Introduction to Atmospheric Pollutant Dispersion Modelling. In Proceedings of the ECAS, online, 14 July 2022; MDPI: Basel, Switzerland, 2022; p. 18. [Google Scholar] [CrossRef]
- Nanni, A.; Tinarelli, G.; Solisio, C.; Pozzi, C. Comparison between Puff and Lagrangian Particle Dispersion Models at a Complex and Coastal Site. Atmosphere 2022, 13, 508. [Google Scholar] [CrossRef]
- Jia, M.; Daniels, W.; Hammerling, D. Comparison of the Gaussian plume and puff atmospheric dispersion models for methane modeling on oil and gas sites. ChemRxiv, 2023; preprint. [Google Scholar] [CrossRef]
- Lee, J.; Lee, S.; Son, H.; Yi, W.H. Development of PUFF–Gaussian dispersion model for the prediction of atmospheric distribution of particle concentration. Sci. Rep. 2021, 11, 6456. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Roy, G.; Hurley, W.J.; Andrews, W.S. Dispersion Coefficients for Gaussian Puff Models. Bound.-Layer Meteorol. 2011, 139, 487–500. [Google Scholar] [CrossRef]
- Mandel, J.; Beezley, J.D.; Kochanski, A.K. Coupled atmosphere-wildland fire modeling with WRF-Fire. Geosci. Model Dev. Discuss. 2011, 4, 497–545. [Google Scholar] [CrossRef]
- Yanosky, J.D.; Paciorek, C.J.; Laden, F.; Hart, J.E.; Puett, R.C.; Liao, D.; Suh, H.H. Spatio-temporal modeling of particulate air pollution in the conterminous United States using geographic and meteorological predictors. Environ. Health 2014, 13, 63. [Google Scholar] [CrossRef]
- Dimakopoulou, K.; Samoli, E.; Analitis, A.; Schwartz, J.; Beevers, S.; Kitwiroon, N.; Beddows, A.; Barratt, B.; Rodopoulou, S.; Zafeiratou, S.; et al. Development and Evaluation of Spatio-Temporal Air Pollution Exposure Models and Their Combinations in the Greater London Area, UK. Int. J. Environ. Res. Public Health 2022, 19, 5401. [Google Scholar] [CrossRef]
- Iyer, S.R.; Balashankar, A.; Aeberhard, W.H.; Bhattacharyya, S.; Rusconi, G.; Jose, L.; Soans, N.; Sudarshan, A.; Pande, R.; Subramanian, L. Modeling fine-grained spatio-temporal pollution maps with low-cost sensors. Npj Clim. Atmos. Sci. 2022, 5, 76. [Google Scholar] [CrossRef]
- Sampson, P.D.; Szpiro, A.A.; Sheppard, L.; Lindström, J.; Kaufman, J.D. Pragmatic estimation of a spatio-temporal air quality model with irregular monitoring data. Atmos. Environ. 2011, 45, 6593–6606. [Google Scholar] [CrossRef]
- Sánchez-Balseca, J.; Pérez-Foguet, A. Spatio-temporal air pollution modelling using a compositional approach. Heliyon 2020, 6, e04794. [Google Scholar] [CrossRef]
- Le, V.D. Spatiotemporal Graph Convolutional Recurrent Neural Network Model for Citywide Air Pollution Forecasting. arXiv 2023, arXiv:2304.12630. [Google Scholar] [CrossRef]
- Beloconi, A.; Probst-Hensch, N.M.; Vounatsou, P. Spatio-temporal modelling of changes in air pollution exposure associated to the COVID-19 lockdown measures across Europe. Sci. Total. Environ. 2021, 787, 147607. [Google Scholar] [CrossRef]
- Tsokov, S.; Lazarova, M.; Aleksieva-Petrova, A. A Hybrid Spatiotemporal Deep Model Based on CNN and LSTM for Air Pollution Prediction. Sustainability 2022, 14, 5104. [Google Scholar] [CrossRef]
- Amato, F.; Guignard, F.; Robert, S.; Kanevski, M. A novel framework for spatio-temporal prediction of environmental data using deep learning. Sci. Rep. 2020, 10, 22243. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, X.; Song, H.; Pan, H.; Wang, B. Air Quality Prediction Model Based on Spatiotemporal Data Analysis and Metalearning. Wirel. Commun. Mob. Comput. 2021, 2021, 9627776. [Google Scholar] [CrossRef]
- Alyousifi, Y.; Ibrahim, K.; Kang, W.; Zin, W.Z.W. Modeling the spatio-temporal dynamics of air pollution index based on spatial Markov chain model. Environ. Monit. Assess. 2020, 192, 719. [Google Scholar] [CrossRef] [PubMed]
- Peralta, B.; Sepúlveda, T.; Nicolis, O.; Caro, L. Space-Time Prediction of PM2.5 Concentrations in Santiago de Chile Using LSTM Networks. Appl. Sci. 2022, 12, 11317. [Google Scholar] [CrossRef]
- Liu, H.; Han, Q.; Sun, H.; Sheng, J.; Yang, Z. Spatiotemporal adaptive attention graph convolution network for city-level air quality prediction. Sci. Rep. 2023, 13, 13335. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X. Three-dimensional spatiotemporal wind field reconstruction based on physics-informed deep learning. Appl. Energy 2021, 300, 117390. [Google Scholar] [CrossRef]
- Muthukumar, P.; Nagrecha, K.; Comer, D.; Calvert, C.F.; Amini, N.; Holm, J.; Pourhomayoun, M. PM2.5 Air Pollution Prediction through Deep Learning Using Multisource Meteorological, Wildfire, and Heat Data. Atmosphere 2022, 13, 822. [Google Scholar] [CrossRef]
- Jadaliha, M.; Lee, J.; Choi, J. Adaptive Control of Multiagent Systems for Finding Peaks of Uncertain Static Fields. J. Dyn. Syst. Meas. Control. 2012, 134, 051007. [Google Scholar] [CrossRef]
- Salam, T.; Hsieh, M.A. Adaptive Sampling and Reduced-Order Modeling of Dynamic Processes by Robot Teams. IEEE Robot. Autom. Lett. 2019, 4, 477–484. [Google Scholar] [CrossRef]
- Leonard, N.E.; Paley, D.A.; Lekien, F.; Sepulchre, R.; Fratantoni, D.M.; Davis, R.E. Collective Motion, Sensor Networks, and Ocean Sampling. Proc. IEEE 2007, 95, 48–74. [Google Scholar] [CrossRef]
- Lan, X. Learning and Monitoring of Spatio-Temporal Fields with Sensing Robots. Doctoral Dissertation, Boston University, Boston, MA, USA, 2015. Available online: https://open.bu.edu/handle/2144/13640 (accessed on 27 March 2024).
- Lan, X.; Schwager, M. Learning a dynamical system model for a spatiotemporal field using a mobile sensing robot. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; IEEE: Piscateville, NJ, USA, 2017; pp. 170–175, ISBN 9781509059928. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems; Springer: Boston, MA, USA, 1996; ISBN 9781461380610/9781461304654. [Google Scholar] [CrossRef]
- Katayama, T. Subspace Methods for System Identification; Springer: London, UK, 2005; ISBN 9781852339814/9781846281587. [Google Scholar] [CrossRef]
- Qin, S.J. An overview of subspace identification. Comput. Chem. Eng. 2006, 30, 1502–1513. [Google Scholar] [CrossRef]
- Ermak, D.L. An analytical model for air pollutant transport and deposition from a point source. Atmos. Environ. (1967) 1977, 11, 231–237. [Google Scholar] [CrossRef]
- Fisher, B.E.A.; Macqueen, J.F. A Theoretical Model for Particulate Transport from an Elevated Source in the Atmosphere. IMA J. Appl. Math. 1981, 27, 359–371. [Google Scholar] [CrossRef]
- Llewelyn, R.P. An analytical model for the transport, dispersion and elimination of air pollutants emitted from a point source. Atmos. Environ. (1967) 1983, 17, 249–256. [Google Scholar] [CrossRef]
- Okamoto, S.; Ohnishi, H.; Yamada, T.; Mikami, T.; Momose, S.; Shinji, H.; Itohiya, T. A model for simulating atmospheric dispersion in low-wind conditions. Int. J. Environ. Pollut. 2001, 16, 69. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Measurement | Operating Range |
|---|---|---|
| Temperature | −40 to 85 °C | |
| BME680 | Barometric Pressure | 300 to 1100 hPa |
| Relative Humidity | 0 to 100% r.H. | |
| SGP30 | eCO2 | 400–60,000 ppm |
| Total VOC | 0–60,000 ppb | |
| SCD41 | CO2 | 400–5000 ppm |
| PMSA003I | Particulate Matter | 0–500 g/m3 |
| SEN0231 | Formaldehyde (HCHO) | 0–5 ppm |
| CO | 1–1000 ppm | |
| MiCS-4514 | NO2 | 0.05–10 ppm |
| NH3 | 1–500 ppm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ragbir, P.; Kaduwela, A.; Lan, X.; Watts, A.; Kong, Z. A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements. Drones 2024, 8, 169. https://doi.org/10.3390/drones8050169
Ragbir P, Kaduwela A, Lan X, Watts A, Kong Z. A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements. Drones. 2024; 8(5):169. https://doi.org/10.3390/drones8050169
Chicago/Turabian StyleRagbir, Prabhash, Ajith Kaduwela, Xiaodong Lan, Adam Watts, and Zhaodan Kong. 2024. "A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements" Drones 8, no. 5: 169. https://doi.org/10.3390/drones8050169
APA StyleRagbir, P., Kaduwela, A., Lan, X., Watts, A., & Kong, Z. (2024). A Control-Theoretic Spatio-Temporal Model for Wildfire Smoke Propagation Using UAV-Based Air Pollutant Measurements. Drones, 8(5), 169. https://doi.org/10.3390/drones8050169