A Novel Ramp Metering Approach Based on Machine Learning and Historical Data


Abstract
:1. Introduction
2. Background
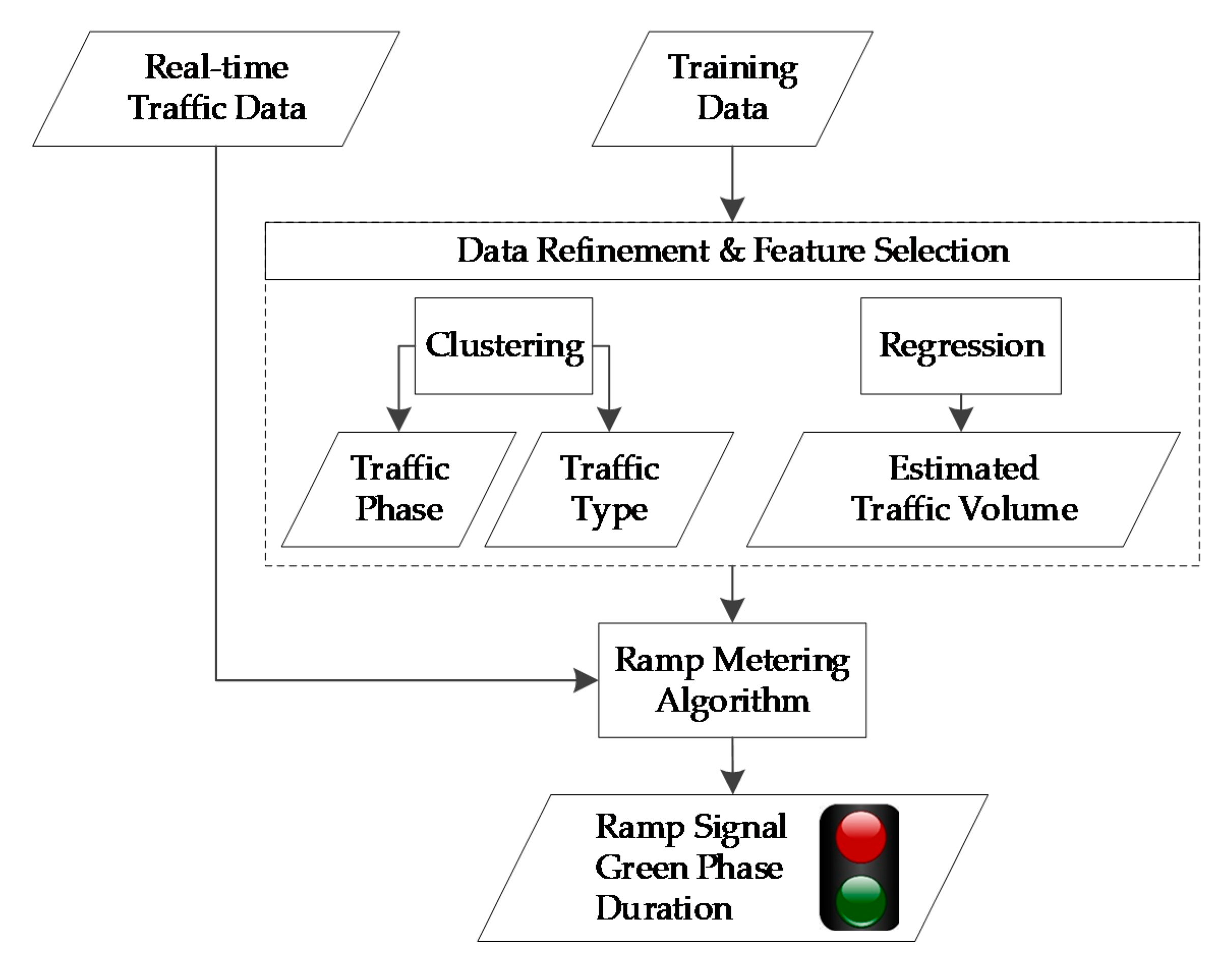
3. Methodology
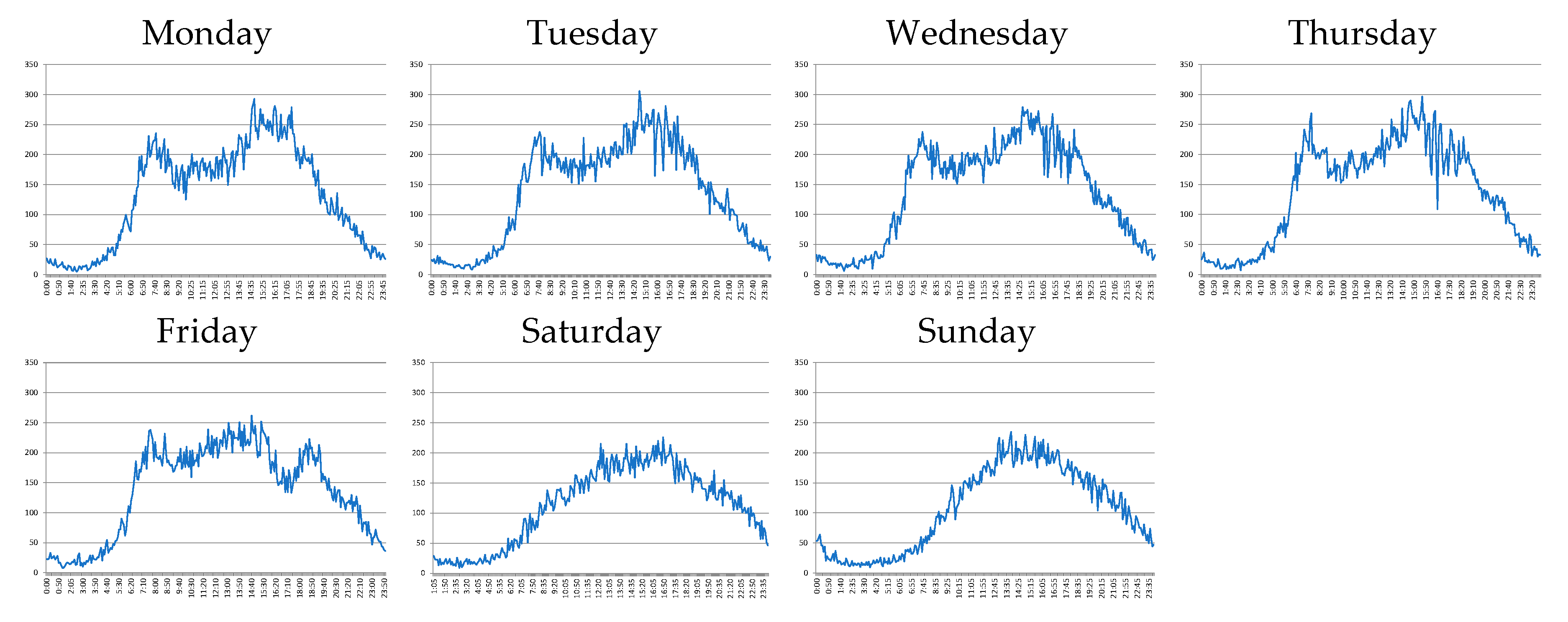
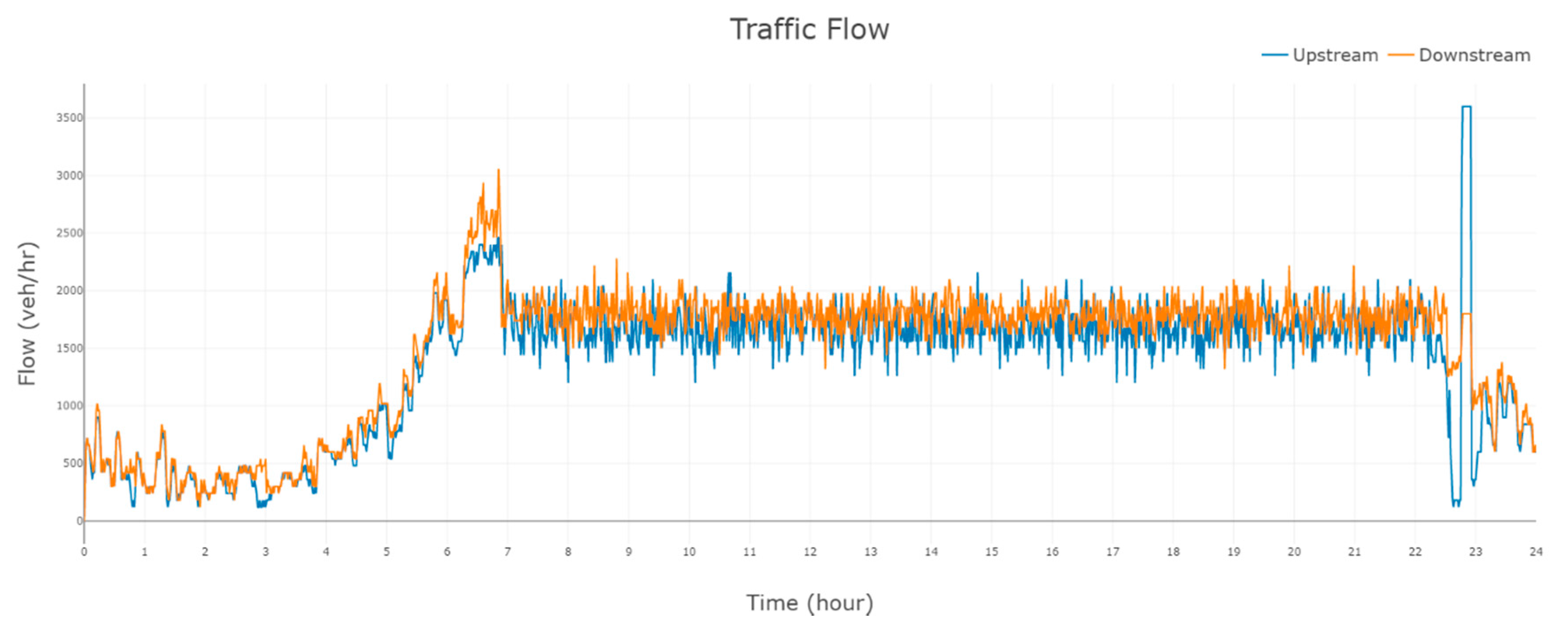
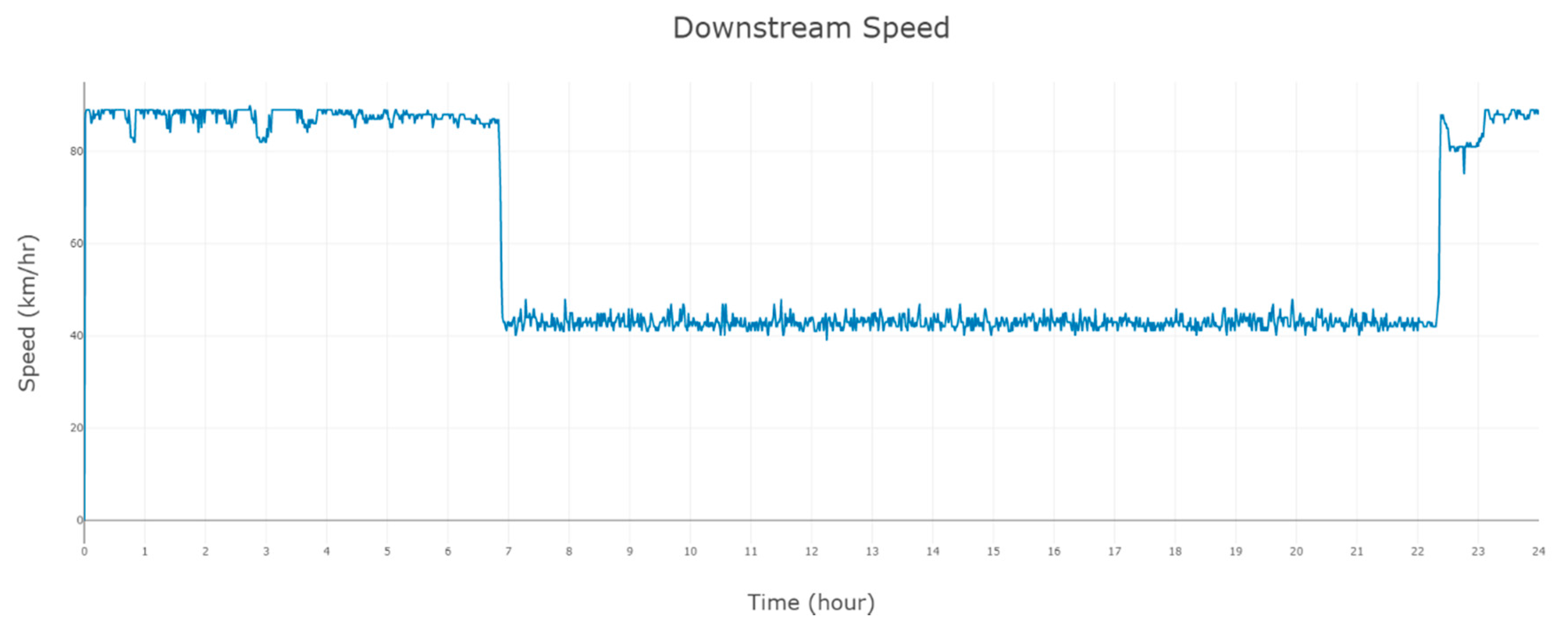
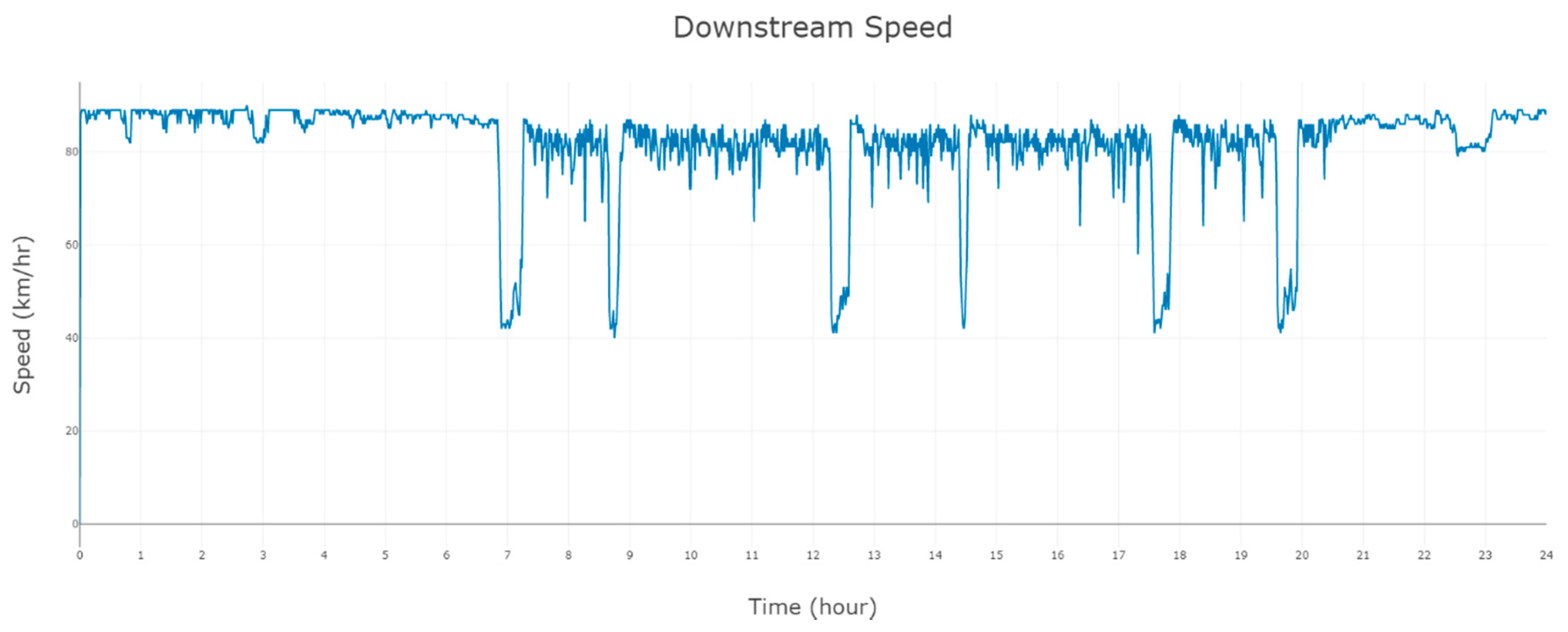
3.1. Data Refinement and Feature Selection
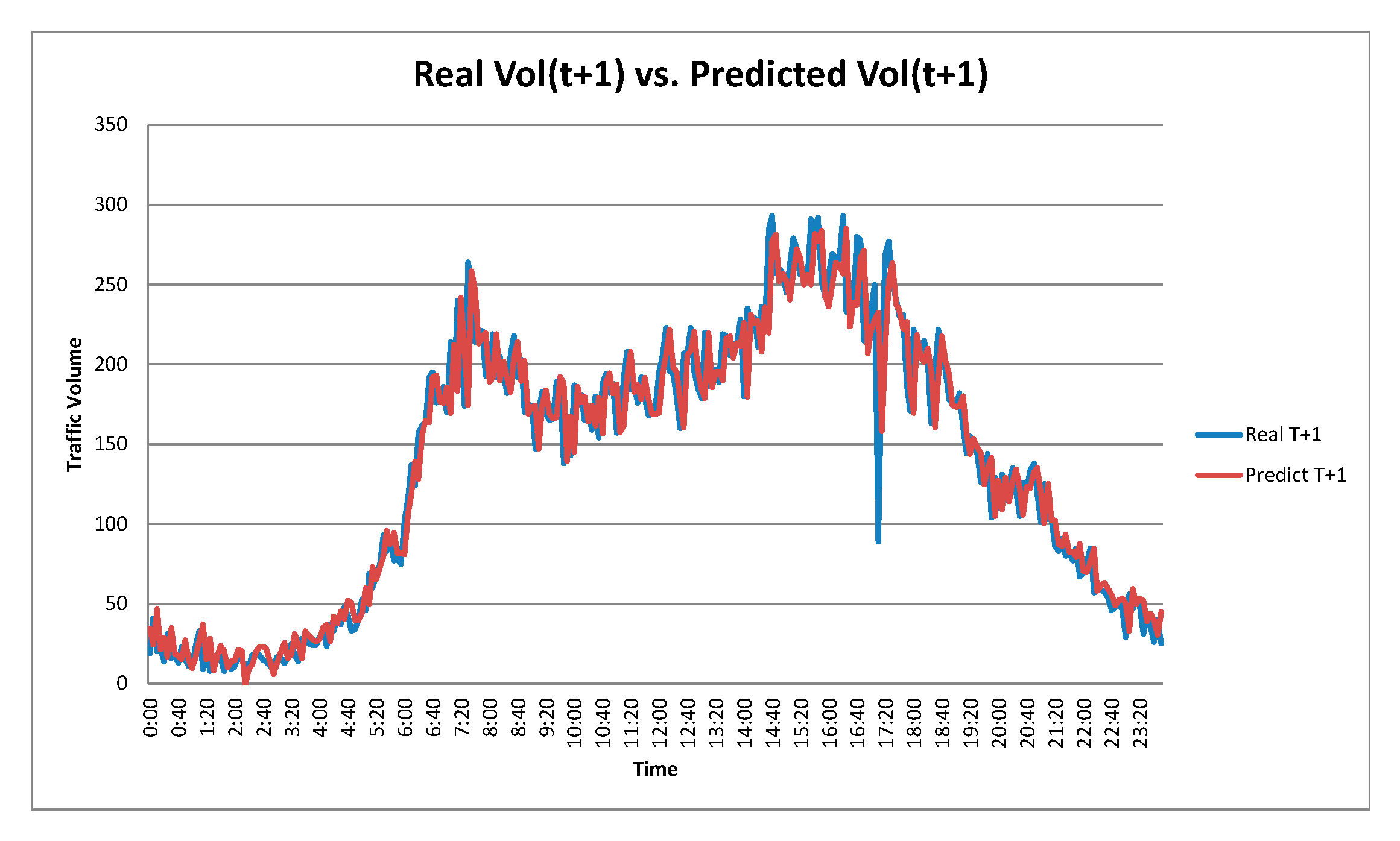
3.2. Regression
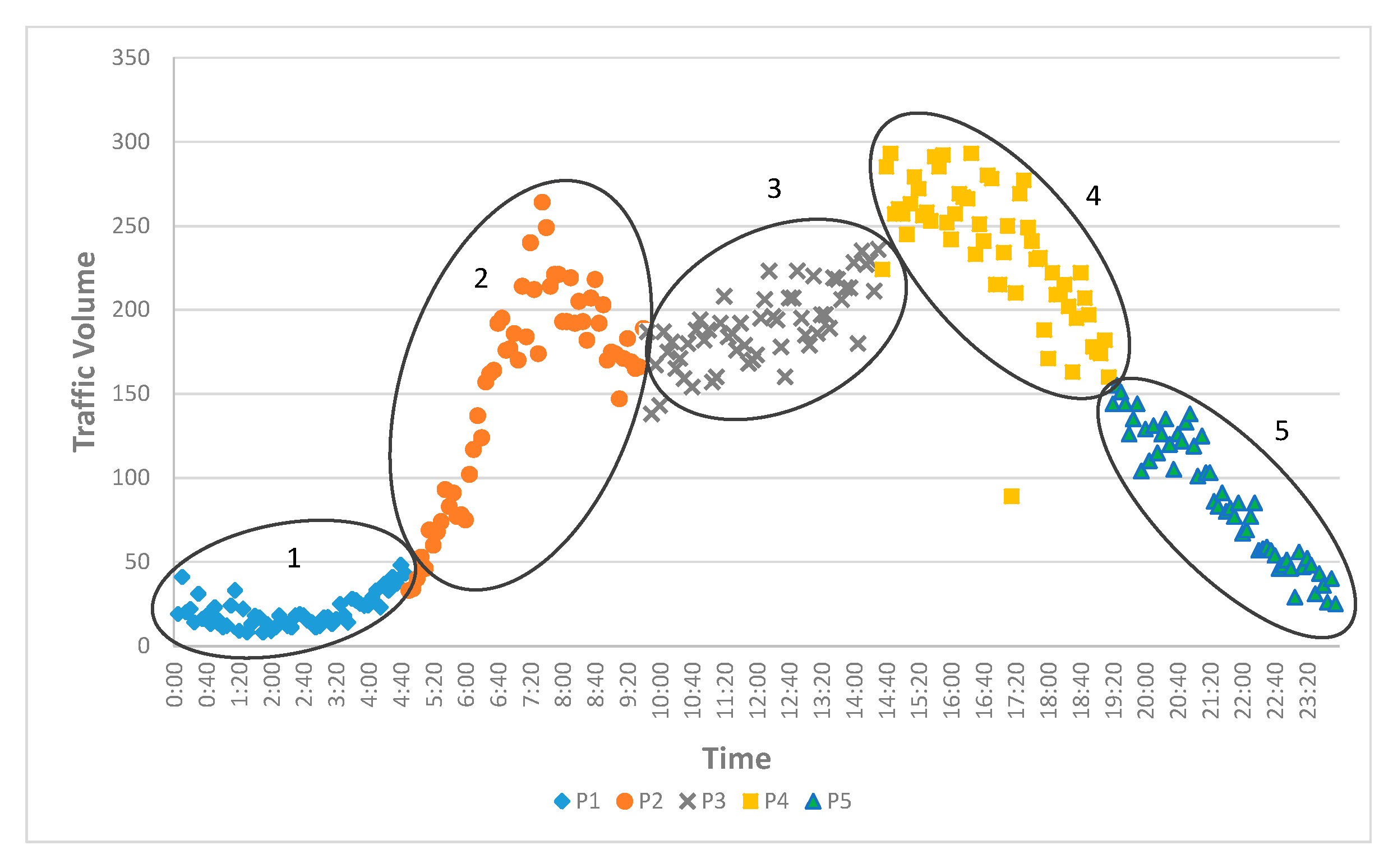
3.3. Clustering
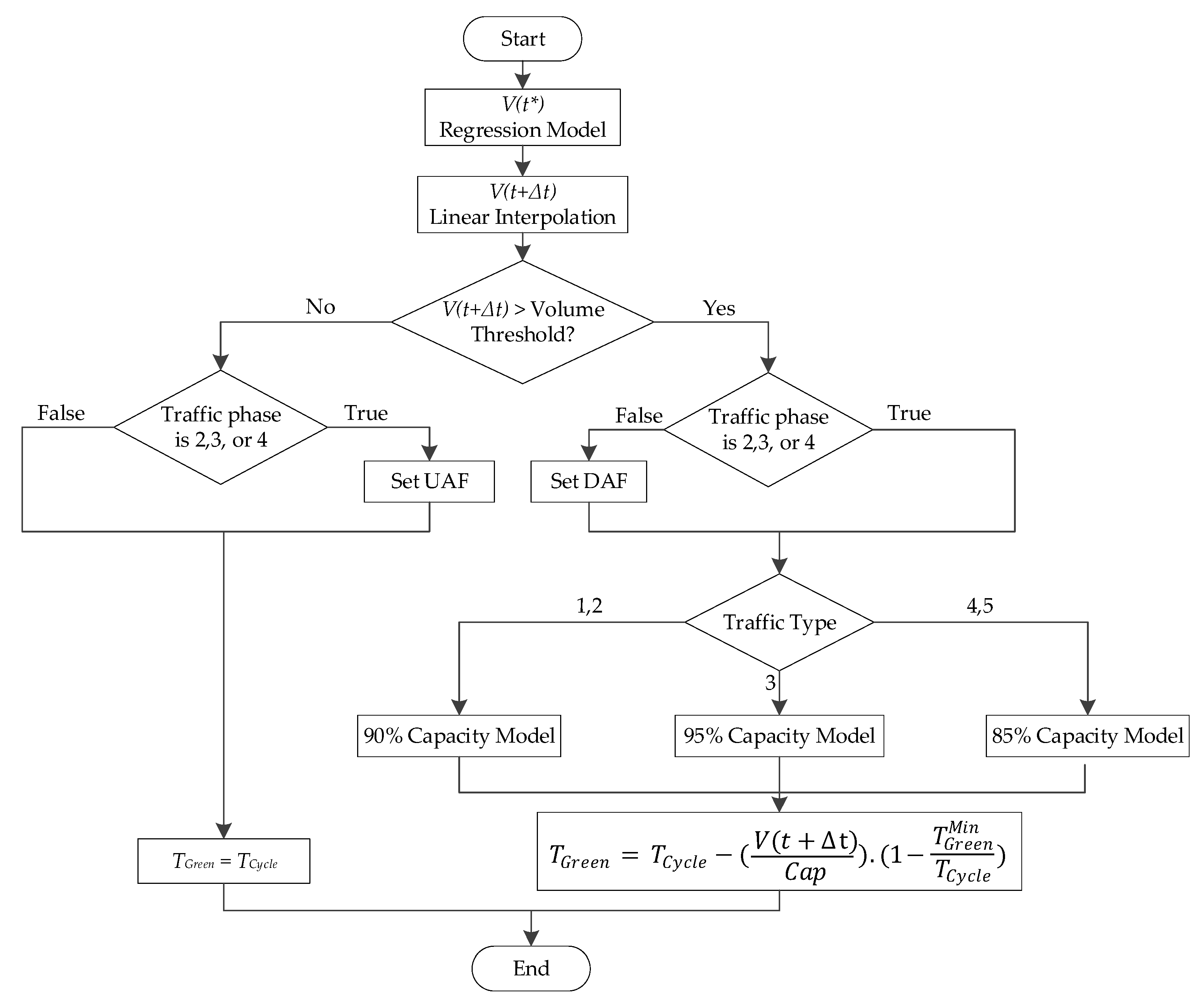
3.4. Proposed Ramp Metering Algorithm
4. Evaluation and Results
4.1. No Control Scenario
4.2. ALINEA Ramp Control Scenario
- g(k): Green phase duration at time interval k
- g(k − 1): Green phase duration at time interval k − 1
- C: Traffic cycle (red phase + green phase duration)
- : The ramp capacity flow (vehicles/hour)
- : Regulator parameter (vehicles/hour)
- : Critical occupancy (%)
- : Occupancy downstream of the merge area at time interval k (%).
4.3. The Proposed Ramp Control Scenario
4.4. Ramp Signal State and Queue Length
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Papageorgiou, M.; Kotsialos, A. Freeway ramp metering: An overview. IEEE Trans. Intell. Transp. Syst. 2002, 3, 271–281. [Google Scholar] [CrossRef]
- Qu, X.; Zhang, J.; Wang, S. On the stochastic fundamental diagram for freeway traffic: Model development, analytical properties, validation, and extensive applications. Transp. Res. Part B Methodol. 2017, 104, 256–271. [Google Scholar] [CrossRef]
- Chung, K.; Rudjanakanoknad, J.; Cassidy, M.J. Relation between traffic density and capacity drop at three freeway bottlenecks. Transp. Res. Part B Methodol. 2007, 41, 82–95. [Google Scholar] [CrossRef]
- Leclercq, L.; Laval, J.A.; Chiabaut, N. Capacity drops at merges: An endogenous model. Transp. Res. Part B Methodol. 2011, 45, 1302–1313. [Google Scholar] [CrossRef]
- Muñoz, J.C.; Daganzo, C.F. The bottleneck mechanism of a freeway diverge. Transp. Res. Part Policy Pract. 2002, 36, 483–505. [Google Scholar] [CrossRef]
- Cassidy, M.J. Freeway On-Ramp Metering, Delay Savings, and Diverge Bottleneck. Transp. Res. Rec. 2003. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, F.; Bai, Q.; Tao, C.; Qi, X. Coordinated Ramp Metering Based on Real-Time OD Information. IEEE Access 2019, 7, 79233–79243. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Hadj-Salem, H.; Blosseville, J.-M. ALINEA: A Local Feedback Control Law for On-Ramp Metering. Transp. Res. Rec. 1991, 1320, 58–64. [Google Scholar]
- Papageorgiou, M. Optimal mainstream traffic flow control of large scale motorway networks. In Proceedings of the 2008 IEEE International Conference on Service Operations and Logistics, and Informatics, Beijing, China, 12–15 October 2008; Volume 2, p. 17. [Google Scholar]
- Gordon, R.L. Ramp Metering. In Intelligent Freeway Transportation Systems: Functional Design; Gordon, R.L., Ed.; Springer: Boston, MA, USA, 2010; pp. 115–145. ISBN 978-1-4419-0733-2. [Google Scholar]
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M. Local Feedback-Based Mainstream Traffic Flow Control on Motorways Using Variable Speed Limits. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1261–1276. [Google Scholar] [CrossRef]
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M.; Messmer, A. Optimal mainstream traffic flow control of large-scale motorway networks. Transp. Res. Part C Emerg. Technol. 2010, 18, 193–212. [Google Scholar] [CrossRef]
- Dabiri, A.; Kulcsár, B. Distributed Ramp Metering—A Constrained Discharge Flow Maximization Approach. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2525–2538. [Google Scholar] [CrossRef]
- Li, Z.; Xu, C.; Li, D.; Liu, P.; Wang, W. Comparing the effects of ramp metering and variable speed limit on reducing travel time and crash risk at bottlenecks. IET Intell. Transp. Syst. 2018, 12, 120–126. [Google Scholar] [CrossRef]
- Chaudhary, N.A.; Tian, Z.; Messer, C.J. Ramp Metering Algorithms and Approaches for Texas; Texas Department of Transportation Research and Technology Transfer Office: Austin, TX, USA, 2004; p. 94. [Google Scholar]
- Shaaban, K.; Khan, M.A.; Hamila, R. Literature Review of Advancements in Adaptive Ramp Metering. Procedia Comput. Sci. 2016, 83, 203–211. [Google Scholar] [CrossRef] [Green Version]
- Chu, L.; Liu, H.X.; Recker, W.; Zhang, H.M. Michael Performance Evaluation of Adaptive Ramp-Metering Algorithms Using Microscopic Traffic Simulation Model. J. Transp. Eng. 2004, 130, 330–338. [Google Scholar] [CrossRef] [Green Version]
- Fares, A.; Gomaa, W. Freeway ramp-metering control based on Reinforcement learning. In Proceedings of the 11th IEEE International Conference on Control Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 1226–1231. [Google Scholar]
- Jacobson, L.; Stribiak, J.; Nelson, L.; Sallman, D. Ramp Management and Control Handbook; Office of Transportation Management Federal Highway Administration: Washington, DC, USA, 2006; p. 342.
- Liu, Z.; Wu, Y.; Cao, S.; Zhu, L.; Shen, G. A Ramp Metering Method Based on Congestion Status in the Urban Freeway. IEEE Access 2020, 8, 76823–76831. [Google Scholar] [CrossRef]
- Portland State University PORTAL: Transportation Data Archive for Portland-Vancouver. Available online: https://portal.its.pdx.edu/home (accessed on 22 September 2018).
- Smaragdis, E.; Papageorgiou, M. Series of New Local Ramp Metering Strategies: Emmanouil Smaragdis and Markos Papageorgiou. Transp. Res. Rec. 2003, 1856, 74–86. [Google Scholar] [CrossRef]
- Smaragdis, E.; Papageorgiou, M.; Kosmatopoulos, E. A flow-maximizing adaptive local ramp metering strategy. Transp. Res. Part B Methodol. 2004, 38, 251–270. [Google Scholar] [CrossRef]
- Jiang, R.; Chung, E.; Lee, J.B. Local On-ramp Queue Management Strategy with Mainline Speed Recovery. Procedia-Soc. Behav. Sci. 2012, 43, 201–209. [Google Scholar] [CrossRef] [Green Version]
- Chi, R.; Hou, Z.; Jin, S.; Wang, D.; Hao, J. A Data-Driven Iterative Feedback Tuning Approach of ALINEA for Freeway Traffic Ramp Metering With PARAMICS Simulations. IEEE Trans. Ind. Inform. 2013, 9, 2310–2317. [Google Scholar] [CrossRef]
- Wang, Y.; Kosmatopoulos, E.B.; Papageorgiou, M.; Papamichail, I. Local Ramp Metering in the Presence of a Distant Downstream Bottleneck: Theoretical Analysis and Simulation Study. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2024–2039. [Google Scholar] [CrossRef]
- Frejo, J.R.D.; De Schutter, B. Feed-Forward ALINEA: A Ramp Metering Control Algorithm for Nearby and Distant Bottlenecks. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2448–2458. [Google Scholar] [CrossRef]
- van de Weg, G.S.; Hegyi, A.; Hoogendoorn, S.P.; De Schutter, B. Efficient Freeway MPC by Parameterization of ALINEA and a Speed-Limited Area. IEEE Trans. Intell. Transp. Syst. 2019, 20, 16–29. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Blosseville, J.; Hadj-Salem, H. Modelling and real-time control of traffic flow on the southern part of boulevard peripherique in paris i. modelling. Transp. Res. Part Policy Pract. 1990, 24, 345–359. [Google Scholar] [CrossRef]
- Hou, Z.; Xu, J.; Zhong, H. Freeway Traffic Control Using iterative Learning Control-Based Ramp Metering and Speed Signaling. IEEE Trans. Veh. Technol. 2007, 56, 466–477. [Google Scholar] [CrossRef]
- Stephanedes, Y.J. Implementation of on-line zone control strategies for optimal ramp metering in the Minneapolis Ring Road. In Proceedings of the Seventh International Conference on Road Traffic Monitoring and Control, London, UK, 26–28 April 1994; pp. 181–184. [Google Scholar]
- Jacobson, L.N.; Henry, K.C.; Mehyar, O. Real-Time Metering Algorithm for Centralized Control; Transportation Research Board: Washington, DC, USA, 1989. [Google Scholar]
- Paesani, G.F. System wide adaptive ramp metering in southern California. In Proceedings of the ITS America 7th Annual Meeting and Exposition: Merging the Transportation and Communications Revolutions, Washington, DC, USA, 2–5 June 1997. [Google Scholar]
- Taylor, C.; Meldrum, D.; Jacobson, L. Fuzzy ramp metering: Design overview and simulation results. Transp. Res. Rec. 1998, 1634, 10–18. [Google Scholar] [CrossRef]
- Taylor, C.; Meldrum, D. Algorithm Design, User Interface, and Optimization Procedure for a Fuzzy Logic Ramp Metering Algorithm: A Training Manual for Freeway Operations Engineers; Washington State Department of Transportation: Olympia, WA, USA, 2000.
- Ghods, A.H.; Kian, A.R.; Tabibi, M. Adaptive freeway ramp metering and variable speed limit control: A genetic-fuzzy approach. IEEE Intell. Transp. Syst. Mag. 2009, 1, 27–36. [Google Scholar] [CrossRef]
- Yu, X.F.; Xu, W.L.; Alam, F.; Potgieter, J.; Fang, C.F. Genetic fuzzy logic approach to local ramp metering control using microscopic traffic simulation. In Proceedings of the 2012 19th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 28–30 November 2012; pp. 290–297. [Google Scholar]
- Xu, J.; Zhao, X.; Srinivasan, D. On optimal freeway local ramp metering using fuzzy logic control with particle swarm optimisation. IET Intell. Transp. Syst. 2013, 7, 95–104. [Google Scholar] [CrossRef]
- Yu, X.F.; Alam, F.; Xu, W.L. Genetic-fuzzy logic ramp metering control for ramp metering of motorway. Int. J. Comput. Appl. Technol. 2014, 50, 30–44. [Google Scholar] [CrossRef]
- Davarynejad, M.; Hegyi, A.; Vrancken, J.; van den Berg, J. Motorway ramp-metering control with queuing consideration using Q-learning. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1652–1658. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 1998; ISBN 978-0-262-19398-6. [Google Scholar]
- Demuth, H.B.; Beale, M.H.; De Jess, O.; Hagan, M.T. Neural Network Design, 2nd ed.; Oklahoma State University: Stillwater, OK, USA, 2014; ISBN 978-0-9717321-1-7. [Google Scholar]
- Jacob, C.; Abdulhai, B. Machine learning for multi-jurisdictional optimal traffic corridor control. Transp. Res. Part Policy Pract. 2010, 44, 53–64. [Google Scholar] [CrossRef]
- Jacob, C.; Abdulhai, B. Integrated traffic corridor control using machine learning. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; Volume 4, pp. 3460–3465. [Google Scholar]
- Jacob, C.; Abdulhai, B. Automated Adaptive Traffic Corridor Control Using Reinforcement Learning: Approach and Case Studies. Transp. Res. Rec. J. Transp. Res. Board 2006, 1959, 1–8. [Google Scholar] [CrossRef]
- Wang, X.-J.; Xi, X.-M.; Gao, G.-F. Reinforcement Learning Ramp Metering without Complete Information. J. Control Sci. Eng. 2012, 2012, 208456. [Google Scholar] [CrossRef] [Green Version]
- Rezaee, K.; Abdulhai, B.; Abdelgawad, H. Application of reinforcement learning with continuous state space to ramp metering in real-world conditions. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1590–1595. [Google Scholar]
- Lu, C.; Huang, J.; Deng, L.; Gong, J. Coordinated Ramp Metering with Equity Consideration Using Reinforcement Learning. J. Transp. Eng. Part Syst. 2017, 143, 04017028. [Google Scholar] [CrossRef]
- Watkins, C.J.C.H.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Li, Z.; Liu, P.; Xu, C.; Duan, H.; Wang, W. Reinforcement Learning-Based Variable Speed Limit Control Strategy to Reduce Traffic Congestion at Freeway Recurrent Bottlenecks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3204–3217. [Google Scholar] [CrossRef]
- Yang, H.; Rakha, H. Reinforcement Learning Ramp Metering Control for Weaving Sections in a Connected Vehicle Environment. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Zhang, H.; Ritchie, S.G.; Lo, Z. A Local Neural Network Controller for Freeway Ramp Metering. IFAC Proc. Vol. 1994, 27, 655–658. [Google Scholar] [CrossRef]
- Zhang, H.M.; Ritchie, S.G. Freeway ramp metering using artificial neural networks. Transp. Res. Part C Emerg. Technol. 1997, 5, 273–286. [Google Scholar] [CrossRef]
- Wei, C.-H. Analysis of artificial neural network models for freeway ramp metering control. Artif. Intell. Eng. 2001, 15, 241–252. [Google Scholar] [CrossRef]
- Mohammed, O.; Kianfar, J. A Machine Learning Approach to Short-Term Traffic Flow Prediction: A Case Study of Interstate 64 in Missouri. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; pp. 1–7. [Google Scholar]
- Deng, F.; Jin, J.; Shen, Y.; Du, Y. Advanced Self-Improving Ramp Metering Algorithm based on Multi-Agent Deep Reinforcement Learning. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3804–3809. [Google Scholar]
- Belletti, F.; Haziza, D.; Gomes, G.; Bayen, A.M. Expert Level Control of Ramp Metering Based on Multi-Task Deep Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1198–1207. [Google Scholar] [CrossRef]
- Yang, M.; Li, Z.; Ke, Z.; Li, M. A Deep Reinforcement Learning-based Ramp Metering Control Framework for Improving Traffic Operation at Freeway Weaving Sections. In Proceedings of the Transportation Research Board 98th Annual Meeting, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Zunhwan, H.; Bldg, G.G.; Ee-Dong, B.; Pa-Ku, S.; Jumsan, K.; Sungmo, R. Developmemt of a New Highway Capacity Estimation Method. In Proceedings of the 6th Eastern Asia Society for Transportation Studies, Bangkok, Thailand, 21–24 September 2005; Volume 5, pp. 984–995. [Google Scholar]
- Abtahi, S.M.; Tamannaei, M.; Haghshenash, H. Analysis and modeling time headway distributions under heavy traffic flow conditions in the urban highways: Case of Isfahan. Transport 2011, 26, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Treiber, M.; Kesting, A. MovSim. Available online: https://civitas.eu/tool-inventory/movsim (accessed on 17 August 2020).
- Treiber, M.; Kesting, A. movsim/traffic-simulation-de. Available online: https://github.com/movsim/traffic-simulation-de (accessed on 17 August 2020).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster | Cluster 1: Traffic Phases | Cluster 2: Traffic Types |
|---|---|---|
| 1 | 0:00–4:40 AM (early morning) | Sharp negative slope |
| 2 | 4:45–9:35 AM (morning) | Moderate negative slope |
| 3 | 9:40 AM–2:25 PM (afternoon) | Small slope or constant |
| 4 | 2:30–7:10 PM (evening) | Moderate positive slope |
| 5 | 7:15–23:55 (night) | Sharp positive slope |
| Model | Equation | Relative Time Headway |
|---|---|---|
| 95% | Shortest | |
| 90% | Medium | |
| 85% | Longest |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghanbartehrani, S.; Sanandaji, A.; Mokhtari, Z.; Tajik, K. A Novel Ramp Metering Approach Based on Machine Learning and Historical Data. Mach. Learn. Knowl. Extr. 2020, 2, 379-396. https://doi.org/10.3390/make2040021
Ghanbartehrani S, Sanandaji A, Mokhtari Z, Tajik K. A Novel Ramp Metering Approach Based on Machine Learning and Historical Data. Machine Learning and Knowledge Extraction. 2020; 2(4):379-396. https://doi.org/10.3390/make2040021
Chicago/Turabian StyleGhanbartehrani, Saeed, Anahita Sanandaji, Zahra Mokhtari, and Kimia Tajik. 2020. "A Novel Ramp Metering Approach Based on Machine Learning and Historical Data" Machine Learning and Knowledge Extraction 2, no. 4: 379-396. https://doi.org/10.3390/make2040021
APA StyleGhanbartehrani, S., Sanandaji, A., Mokhtari, Z., & Tajik, K. (2020). A Novel Ramp Metering Approach Based on Machine Learning and Historical Data. Machine Learning and Knowledge Extraction, 2(4), 379-396. https://doi.org/10.3390/make2040021