Wireless Motion Capture System for Upper Limb Rehabilitation




Abstract
:1. Introduction
1.1. Types of Upper Limb Rehabilitation Systems
1.2. WSN-based Upper Limb Rehabilitation Systems
1.3. Upper Limb Motion Reconstruction
1.4. Motivation & Objectives
2. Upper Limb Modeling
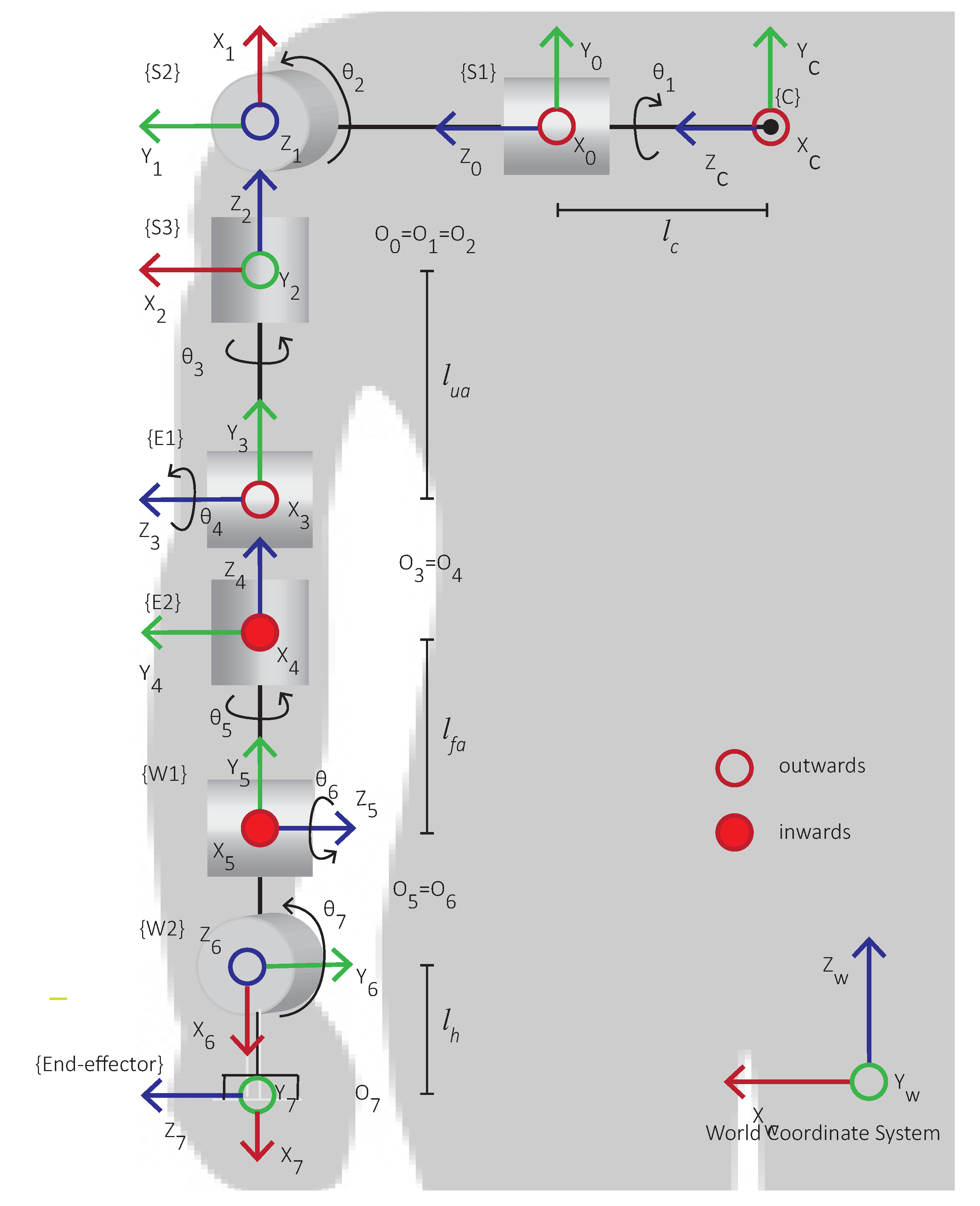
2.1. Upper Limb Kinematic Model
2.2. Range of Motion for the Upper Limb Model
2.3. Dh Parameters of Upper Limb Model
3. DoFs Angles Estimation
3.1. Sensor Fusion and Orientation Estimation
3.2. Estimation of the Shoulder Joint Angles
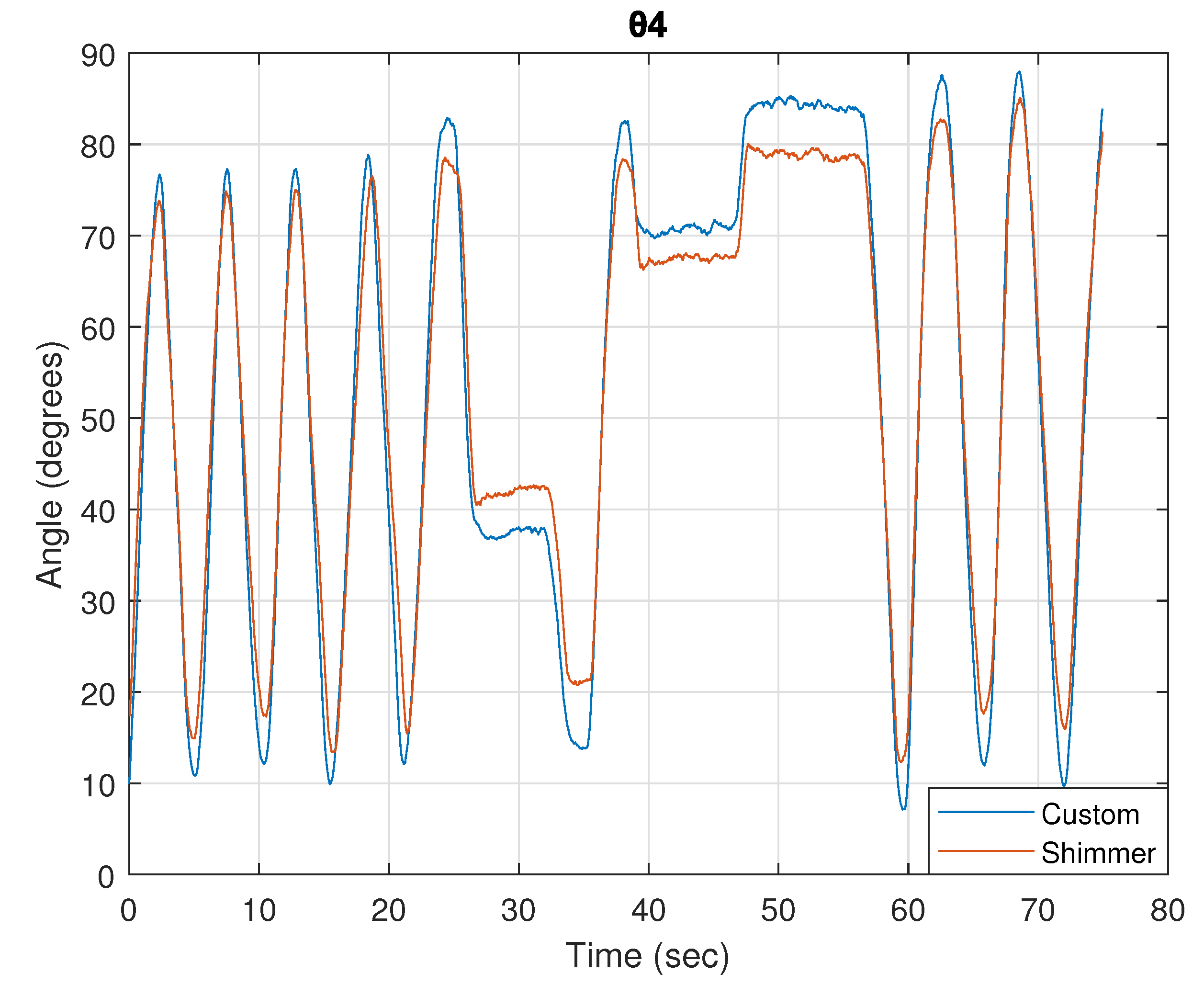
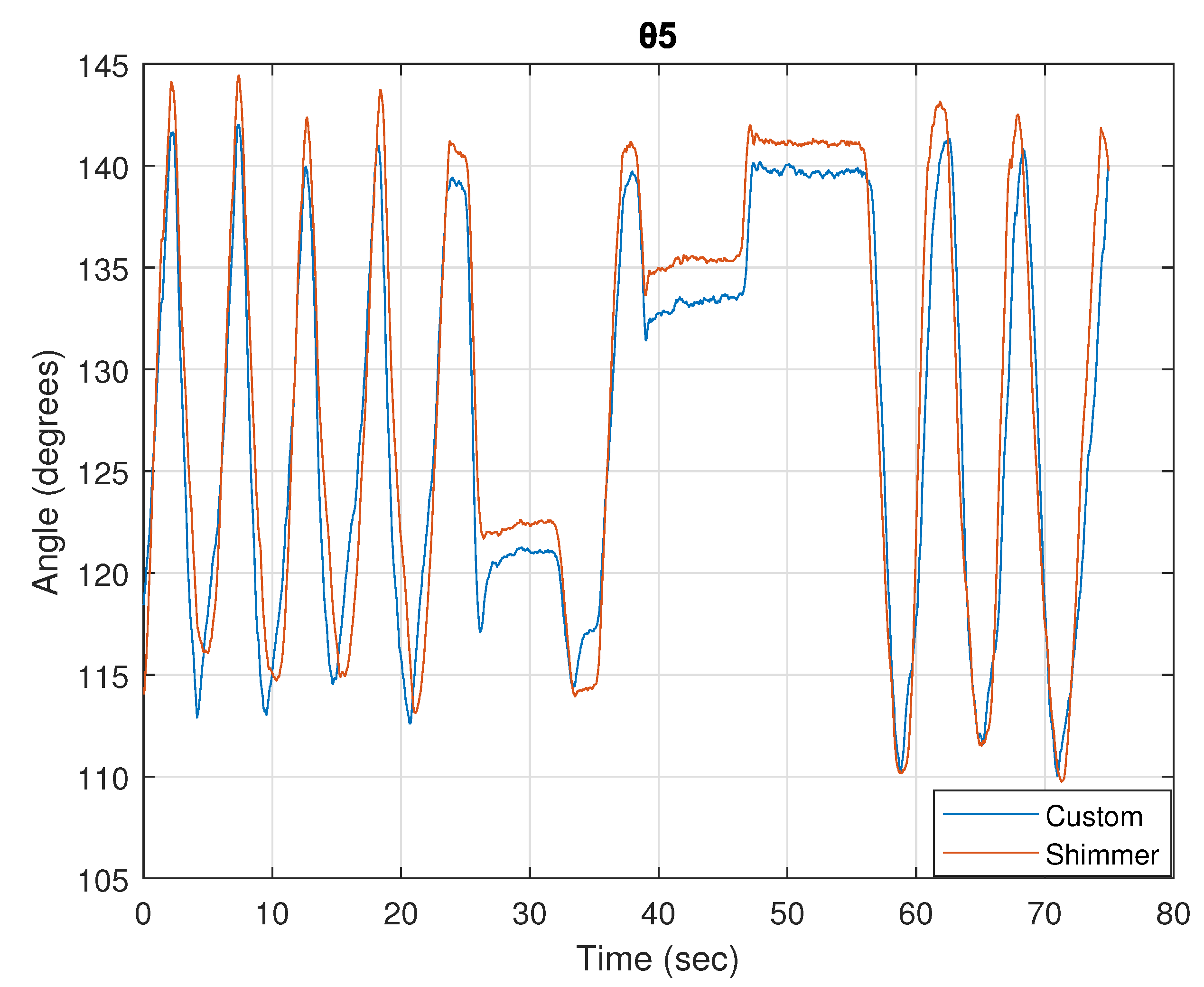
3.3. Estimation of the Elbow Joint Angles
3.4. Estimation of the Wrist Joint Angles
4. System Implementation and Experimental Results
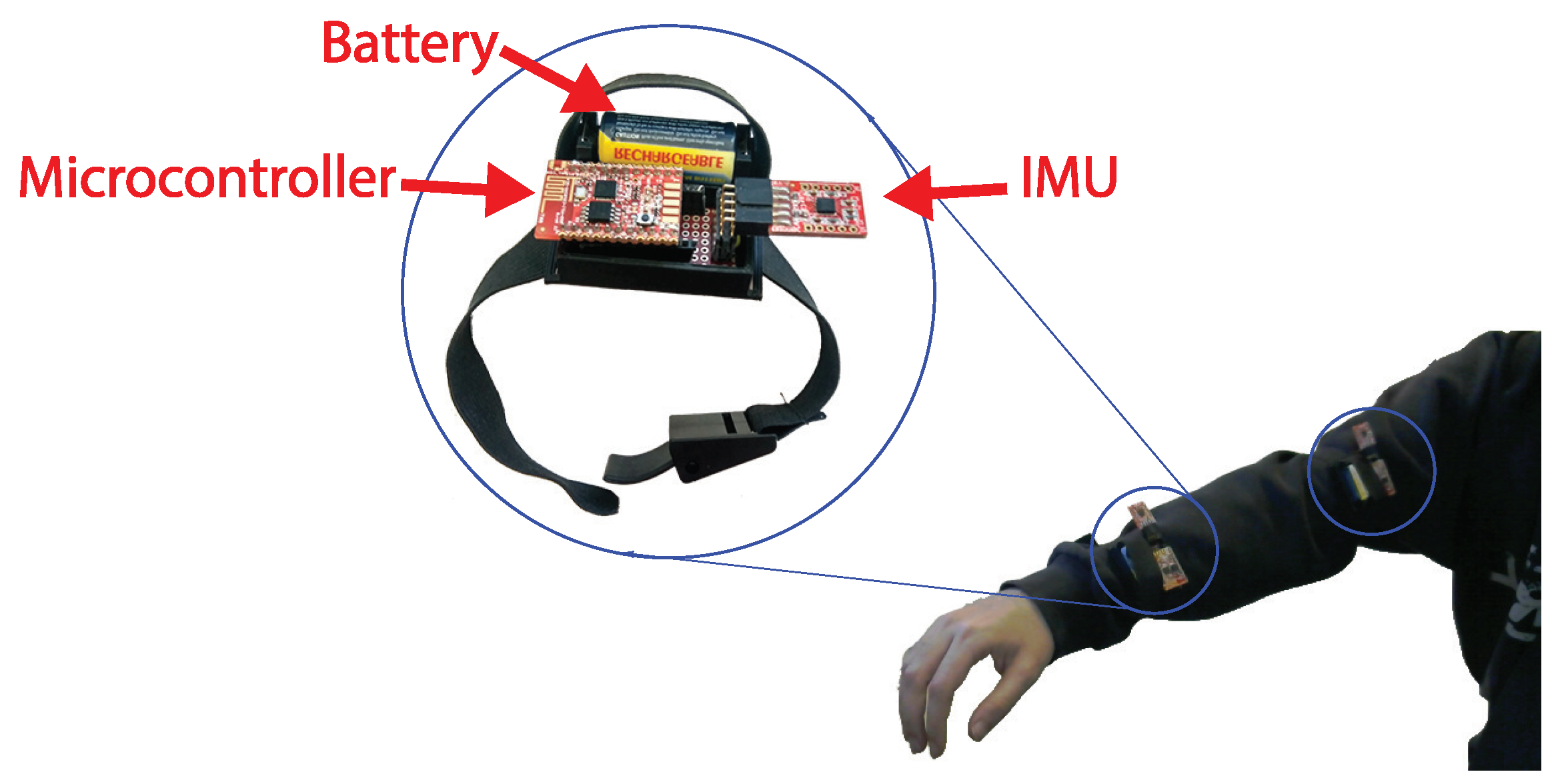
4.1. Motion Sensors
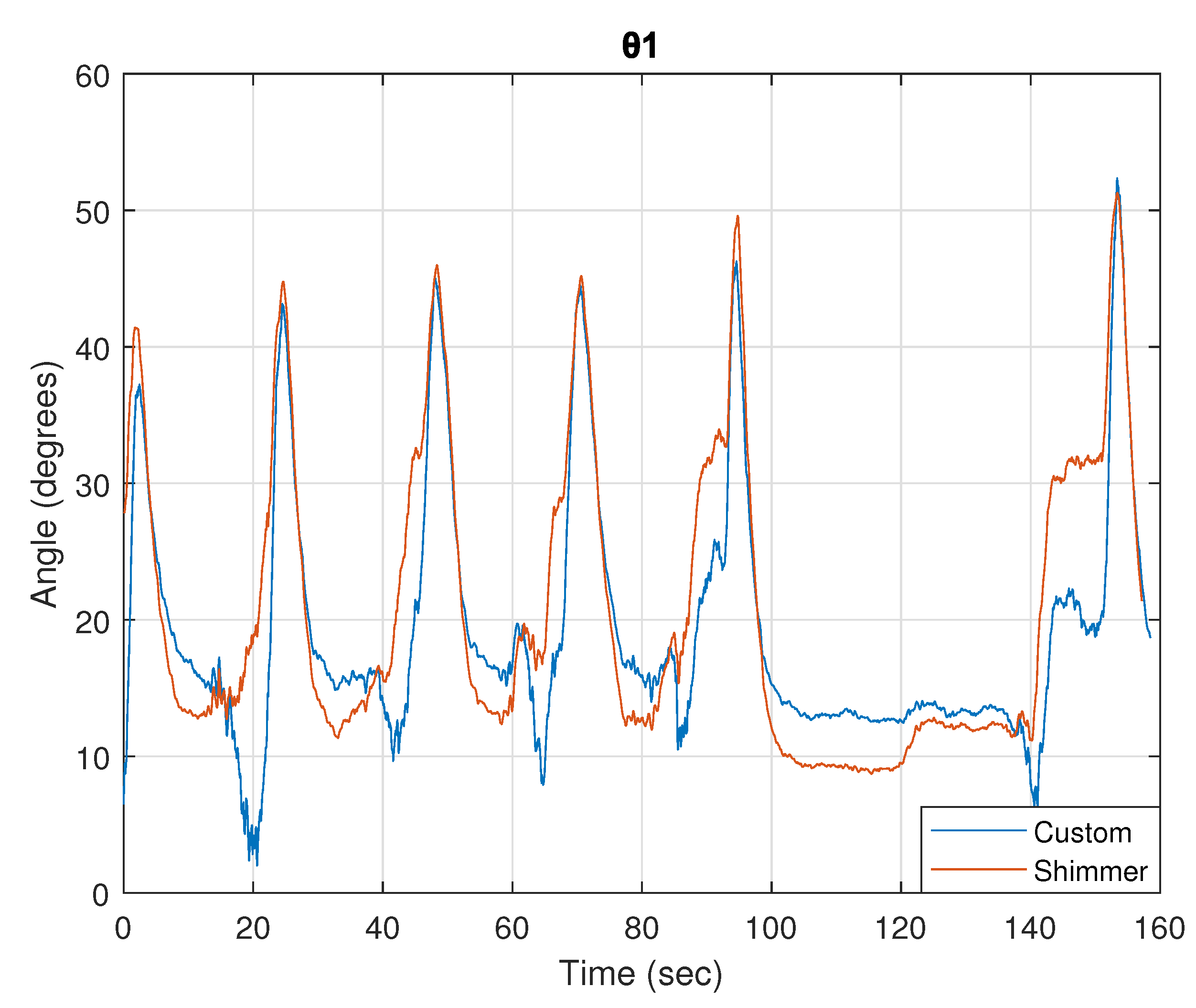
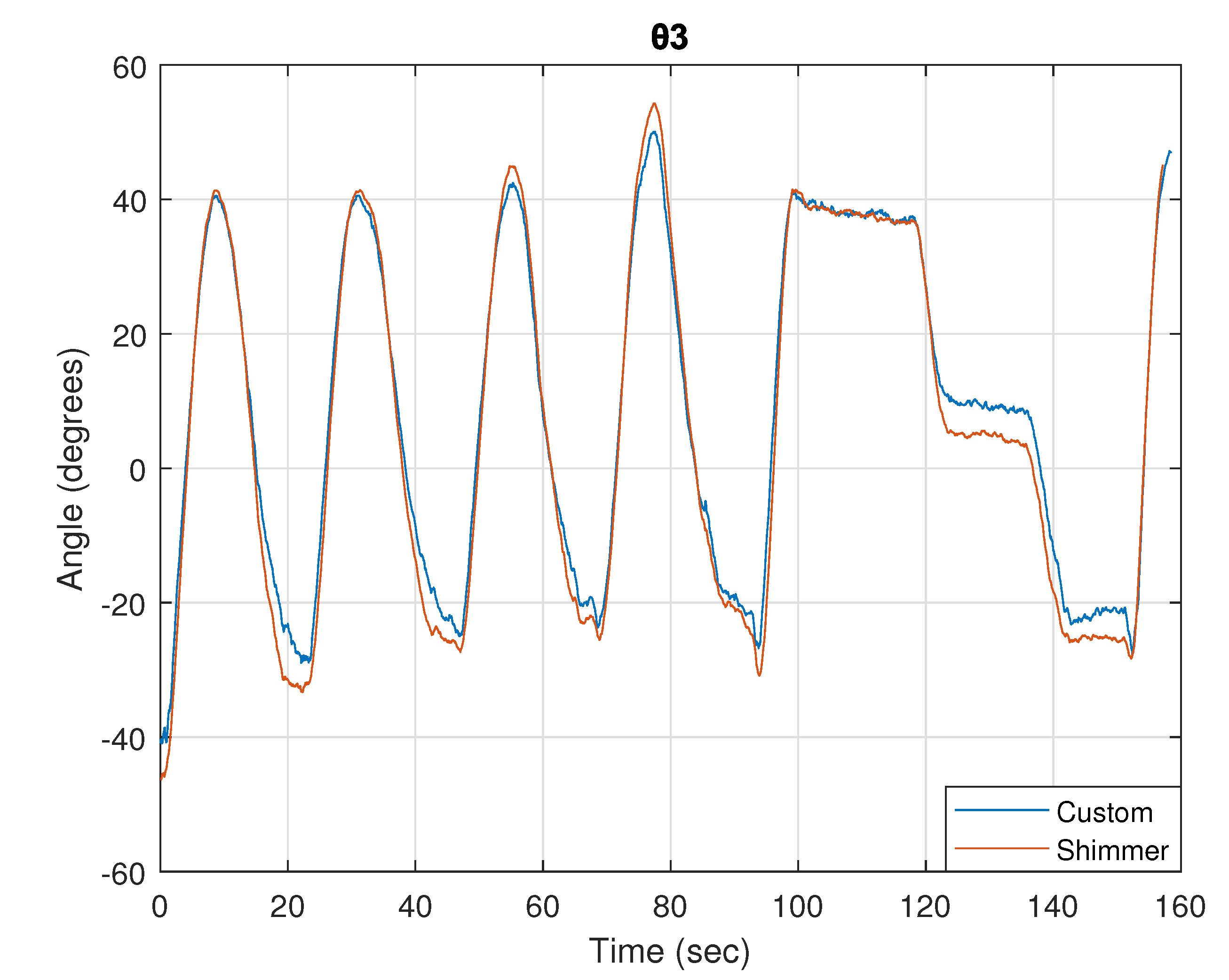
4.2. Elbow Joint Flexion-Extension Exercise
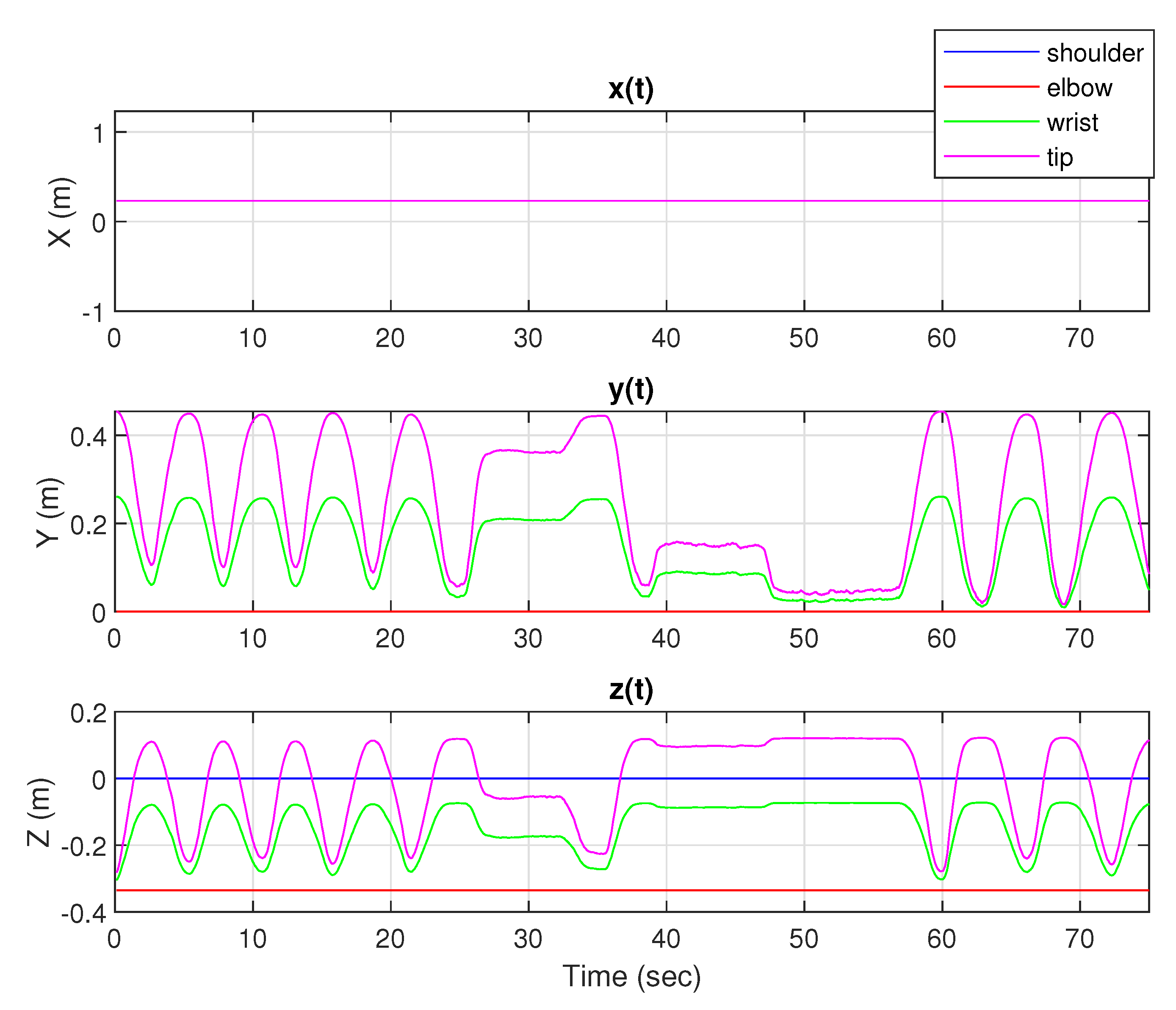
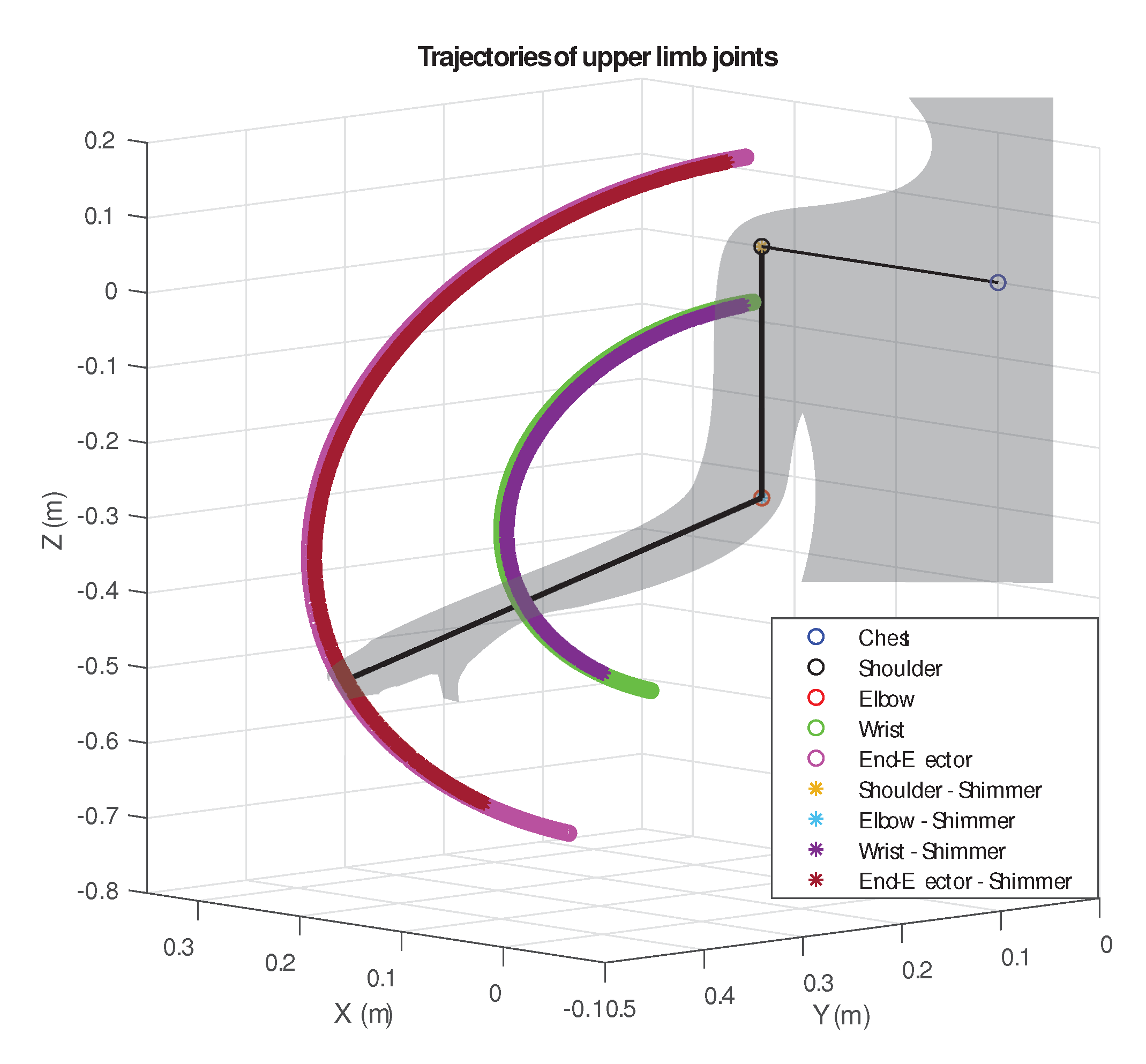
4.3. Shoulder Joint Abduction-Adduction Exercise
4.4. Wrist Joint Flexion-Extension Exercise
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3D | 3-Dimensional |
| CSMA/CA | Carrier Sense Multiple Access/Collision Detection |
| DH | Denavit-Hartenberg |
| DoF | Degrees of Freedom |
| IC | Inter Integrated Circuit |
| IMU | Inertial Measurement Unit |
| LoS | Line of Sight |
| MEMS | Micro-Electro-Mechanical System |
| OLE | Optical Linear Encoders |
| PCA | Principal Component Analysis |
| TDMA | Time Division Multiple Access |
| WSN | Wireless Sensor Network |
References
- García-Rudolph, A.; Laxe, S.; Sauri, J.; Opisso, E.; Tormos, J.; Bernabeu, M. Evidence of chronic stroke rehabilitation interventions in activities and participation outcomes: Systematic review of meta-analyses of randomized controlled trials. Eur. J. Phys. Rehabil. Med. 2019, 55, 695–709. [Google Scholar] [CrossRef]
- Kwakkel, G.; van Peppen, R.; Wagenaar, R.C.; Dauphinee, S.W.; Richards, C.; Ashburn, A.; Miller, K.; Lincoln, N.; Partridge, C.; Wellwood, I.; et al. Effects of augmented exercise therapy time after stroke: A meta-analysis. Stroke 2004, 35, 2529–2539. [Google Scholar] [CrossRef] [Green Version]
- López-Nava, I.H.; Muñoz-Meléndez, A. Wearable Inertial Sensors for Human Motion Analysis: A Review. IEEE Sens. J. 2016, 16, 7821–7834. [Google Scholar] [CrossRef]
- Zhou, H.; Hu, H. Human motion tracking for rehabilitation-A survey. Biomed. Signal Process. Control 2008, 3, 1–18. [Google Scholar] [CrossRef]
- Onose, G.; Popescu, N.; Munteanu, C.; Ciobanu, V.; Sporea, C.; Mirea, M.D.; Daia, C.; Andone, I.; Spînu, A.; Mirea, A. Mobile Mechatronic/Robotic Orthotic Devices to Assist–Rehabilitate Neuromotor Impairments in the Upper Limb: A Systematic and Synthetic Review. Front. Neurosci. 2018, 12, 577. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. NeuroEng. Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef] [Green Version]
- Yoon, J.; Novandy, B.; Yoon, C.H.; Park, K.J. A 6-DOF gait rehabilitation robot with upper and lower limb connections that allows walking velocity updates on various terrains. IEEE/ASME Trans. Mechatron. 2010, 15, 201–215. [Google Scholar] [CrossRef]
- Wong, W.Y.; Wong, M.S.; Lo, K.H. Clinical applications of sensors for human posture and movement analysis: A review. Prosthetics Orthot. Int. 2007, 31, 62–75. [Google Scholar] [CrossRef] [PubMed]
- Hadjidj, A.; Souil, M.; Bouabdallah, A.; Challal, Y.; Owen, H. Wireless sensor networks for rehabilitation applications: Challenges and opportunities. J. Netw. Comput. Appl. 2013, 36, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-Sensor Fusion in Body Sensor Networks: State-of-the-art and research challenges. Inf. Fusion 2016, 35, 68–80. [Google Scholar] [CrossRef]
- Macedo, P.; Afonso, J.A.; Rocha, L.A.; Simoes, R. A telerehabilitation system based on wireless motion capture sensors. In Proceedings of the International Conference on Physiological Computing Systems, Lisbon, Portugal, 7–9 January 2014; pp. 55–62. [Google Scholar]
- Arnold, D.; Li, X.; Lin, Y.; Wang, Z.; Yi, W.J.; Saniie, J. IoT Framework for 3D Body Posture Visualization. In Proceedings of the 2020 IEEE International Conference on Electro Information Technology (EIT), Chicago, IL, USA, 31 July–1 August 2020; pp. 117–120. [Google Scholar] [CrossRef]
- Lee, G.X.; Low, K.S.; Taher, T. Unrestrained measurement of arm motion based on a wearable wireless sensor network. IEEE Trans. Instrum. Meas. 2010, 59, 1309–1317. [Google Scholar] [CrossRef]
- Mazomenos, E.B.; Biswas, D.; Cranny, A.; Rajan, A.; Maharatna, K.; Achner, J.; Klemke, J.; Jöbges, M.; Ortmann, S.; Langendörfer, P. Detecting elementary arm movements by tracking upper limb joint angles with MARG sensors. IEEE J. Biomed. Health Inform. 2016, 20, 1088–1099. [Google Scholar] [CrossRef] [PubMed]
- Hadjidj, A.; Bouabdallah, A.; Challal, Y. Rehabilitation supervision using wireless sensor networks. In Proceedings of the 2011 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Lucca, Italy, 20–24 June 2011; pp. 1–3. [Google Scholar]
- Nguyen, K.D.; Chen, I.M.; Luo, Z.; Yeo, S.H.; Duh, H.B.L. A wearable sensing system for tracking and monitoring of functional arm movement. IEEE/ASME Trans. Mechatron. 2011, 16, 213–220. [Google Scholar] [CrossRef]
- Lim, C.K.; Chen, I.M.; Luo, Z.; Yeo, S.H. A low cost wearable wireless sensing system for upper limb home rehabilitation. In Proceedings of the 2010 IEEE Conference on Robotics Automation and Mechatronics (RAM), Singapore, 28–30 June 2010; pp. 1–8. [Google Scholar]
- Lim, K.Y.; Goh, F.Y.K.; Dong, W.; Nguyen, K.D.; Chen, I.M.; Yeo, S.H.; Duh, H.B.L.; Kim, C.G. A wearable, self-calibrating, wireless sensor network for body motion processing. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1017–1022. [Google Scholar]
- Jiang, Y.; Qin, Y.; Kim, I.; Wang, Y. Towards an IoT-based upper limb rehabilitation assessment system. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Korea, 11–15 July 2017; pp. 2414–2417. [Google Scholar]
- Papazoglou, P.; Laskari, T.; Fourlas, G. Towards a low cost open architecture wearable sensor network for health care applications. In Proceedings of the 7th International Conference on Pervasive Technologies Related to Assistive Environments, St Petersburg, Russia, 23–25 September 2014; p. 10. [Google Scholar]
- Alves, R.C.; Gabriel, L.B.; de Oliveira, B.T.; Margi, C.B.; dos Santos, F.C.L. Assisting physical (hydro) therapy with wireless sensors networks. IEEE Internet Things J. 2015, 2, 113–120. [Google Scholar] [CrossRef]
- Libelium Pushes Its eHealth IoT Platform with a New Cloud and Medical Development Kits. Available online: https://www.libelium.com/libeliumworld/libelium-pushes-its-ehealth-iot-platform-with-a-new-cloud-and-medical-development-kits/ (accessed on 15 December 2020).
- Deltason Medical Ltd. Available online: www.deltason.com (accessed on 15 December 2020).
- Xsens 3D Motion Tracking. Available online: www.xsens.com (accessed on 15 December 2020).
- The IoT Marketplace. Available online: www.the-iot-marketplace.com/mysignals-sport-performance-monitoring-development-kit-ble (accessed on 15 December 2020).
- Shimmer Wireless Sensing Technology. Available online: www.shimmer-research.com (accessed on 15 December 2020).
- De Baets, L.; van der Straaten, R.; Matheve, T.; Timmermans, A. Shoulder Assessment according to the International Classification of Functioning by means of Inertial Sensor Technologies: A Systematic Review. Gait Posture 2017, 57, 278–294. [Google Scholar] [CrossRef] [Green Version]
- de Lucena, D.S.; Stoller, O.; Rowe, J.B.; Chan, V.; Reinkensmeyer, D.J. Wearable sensing for rehabilitation after stroke: Bimanual jerk asymmetry encodes unique information about the variability of upper extremity recovery. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1603–1608. [Google Scholar]
- Tsilomitrou, O.; Gkountas, K.; Evangeliou, N.; Dermatas, E. On the development of a wireless motion capture sensor node for upper limb rehabilitation. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1568–1573. [Google Scholar]
- Phillips, W.; Hailey, C.; Gebert, G. A review of attitude kinematics for aircraft flight simulation. In Proceedings of the Modeling and Simulation Technologies Conference, Denver, CO, USA, 14–17 August 2000; p. 4302. [Google Scholar]
- Marieb, E.N.; Hoehn, K. Human Anatomy & Physiology; Pearson Education: London, UK, 2007. [Google Scholar]
- Theofanidis, M.; Lioulemes, A.; Makedon, F. A motion and force analysis system for human upper-limb exercises. In Proceedings of the 9th ACM International Conference on Pervasive Technologies Related to Assistive Environments, Corfu, Greece, 29 June–1 July 2016; p. 9. [Google Scholar]
- Peppoloni, L.; Filippeschi, A.; Ruffaldi, E.; Avizzano, C.A. A novel 7 degrees of freedom model for upper limb kinematic reconstruction based on wearable sensors. In Proceedings of the 2013 IEEE 11th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 26–28 September 2013; pp. 105–110. [Google Scholar]
- Ruffaldi, E.; Peppoloni, L.; Filippeschi, A.; Avizzano, C.A. A novel approach to motion tracking with wearable sensors based on probabilistic graphical models. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1247–1252. [Google Scholar]
- Ethier, C.R.; Simmons, C.A. Introductory Biomechanics: From Cells to Organisms; Cambridge University Press: Cambridge, UK, 2007; pp. 381, 468–470. [Google Scholar]
- Holzbaur, K.R.; Murray, W.M.; Delp, S.L. A model of the upper extremity for simulating musculoskeletal surgery and analyzing neuromuscular control. Ann. Biomed. Eng. 2005, 33, 829–840. [Google Scholar] [CrossRef]
- Ruby, L.; Conney, W., III; An, K.; Linscheid, R.; Chao, E. Relative motion of selected carpal bones: A kinematic analysis of the normal wrist. J. Hand Surg. 1988, 13, 1–10. [Google Scholar] [CrossRef]
- Spong, M.W.; Vidyasagar, M. Robot Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- InvenSense MPU-9150. Available online: www.invensense.com/products/motion-tracking/9-axis/mpu-9150/ (accessed on 15 December 2020).
- Gallagher, A.; Matsuoka, Y.; Ang, W.T. An efficient real-time human posture tracking algorithm using low-cost inertial and magnetic sensors. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2967–2972. [Google Scholar]
- Tian, Y.; Wei, H.; Tan, J. An adaptive-gain complementary filter for real-time human motion tracking with MARG sensors in free-living environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 21, 254–264. [Google Scholar] [CrossRef]
- Fourati, H. Heterogeneous Data Fusion Algorithm for Pedestrian Navigation via Foot-Mounted Inertial Measurement Unit and Complementary Filter. IEEE Trans. Instrum. Meas. 2015, 64, 221–229. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef] [Green Version]
- Mahony, R.; Hamel, T.; Pflimlin, J. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef] [Green Version]
- Gui, P.; Tang, L.; Mukhopadhyay, S. MEMS based IMU for tilting measurement: Comparison of complementary and kalman filter based data fusion. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 2004–2009. [Google Scholar] [CrossRef]
- Pedley, M. High precision calibration of a three-axis accelerometer. Free. Semicond. Appl. Note 2013, 1, AN4399. [Google Scholar]
- Tait-Bryan Angles. Available online: https://en.wikipedia.org/wiki/Euler_angles (accessed on 15 December 2020).
- Espressif Systems. Available online: www.espressif.com (accessed on 15 December 2020).
- Semiconductors, P. The I2C-bus specification. Philips Semicond. 2000, 9397, 00954. [Google Scholar]
- Fielding, R.; Gettys, J.; Mogul, J.; Frystyk, H.; Masinter, L.; Leach, P.; Berners-Lee, T. Hypertext Transfer Protocol–HTTP/1.1. Technical Report. Available online: http://www.rfc-editor.org/rfc/rfc2616.txt (accessed on 17 February 2021).
- Fette, I.; Melnikov, A. The Websocket Protocol. Technical Report. Available online: http://www.rfc-editor.org/rfc/rfc6455.txt (accessed on 17 February 2021).
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Huang, Z.; Wu, J. Hierarchical information fusion for human upper limb motion capture. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 1704–1711. [Google Scholar]
- Zhang, S.; Jin, W.; Zhang, Y. Implementation and complexity analysis of orientation estimation algorithms for human body motion tracking using low-cost sensors. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 49–54. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Description |
|---|---|
| Chest {C} | Chest Position—Origin Frame |
| Shoulder {S1} | Flexion and Extension |
| Shoulder {S2} | Ab- and Adduction |
| Shoulder {S3} | In- and External Rotation |
| Elbow {E1} | Flexion and Extension |
| Elbow {E2} | Pronation and Supination |
| Wrist {W1} | Flexion and Extension |
| Wrist {W2} | Deviation |
| Hand {End-effector} | End-effector |
| Motion | DoF Range |
|---|---|
| Shoulder extension-flexion | –180 |
| Shoulder adduction-abduction | 0–180 |
| Shoulder internal-external rotation | –20 |
| Elbow extension-flexion | 0–130 |
| Elbow supination-pronation | –90 |
| Wrist extension-flexion | –70 |
| Wrist radial-ulnar deviation | –25 |
| Frames | Links | ai | |||
|---|---|---|---|---|---|
| {C} | 0 | 0 | 0 | ° | |
| {S1} | 1 | 0 | 90° | 0 | ° |
| {S2} | 2 | 0 | 90° | 0 | ° |
| {S3} | 3 | 0 | 90° | ° | |
| {E1} | 4 | 0 | 90° | 0 | ° |
| {E2} | 5 | 0 | ° | ||
| {W1} | 6 | 0 | 90° | 0 | ° |
| {W2} | 7 | 90° | 0 |
| Trajectory | MAE [m] | MaxError [m] | RMSE [m] |
|---|---|---|---|
| Wrist | 0.0126 | 0.0509 | 0.0161 |
| End-Effector | 0.0182 | 0.0706 | 0.0229 |
| Trajectory | MAE [m] | MaxError [m] | RMSE [m] |
|---|---|---|---|
| Elbow | 0.0061 | 0.0462 | 0.0087 |
| Wrist | 0.0072 | 0.0547 | 0.0103 |
| End-Effector | 0.0076 | 0.0577 | 0.0109 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsilomitrou, O.; Gkountas, K.; Evangeliou, N.; Dermatas, E. Wireless Motion Capture System for Upper Limb Rehabilitation. Appl. Syst. Innov. 2021, 4, 14. https://doi.org/10.3390/asi4010014
Tsilomitrou O, Gkountas K, Evangeliou N, Dermatas E. Wireless Motion Capture System for Upper Limb Rehabilitation. Applied System Innovation. 2021; 4(1):14. https://doi.org/10.3390/asi4010014
Chicago/Turabian StyleTsilomitrou, Ourania, Konstantinos Gkountas, Nikolaos Evangeliou, and Evangelos Dermatas. 2021. "Wireless Motion Capture System for Upper Limb Rehabilitation" Applied System Innovation 4, no. 1: 14. https://doi.org/10.3390/asi4010014
APA StyleTsilomitrou, O., Gkountas, K., Evangeliou, N., & Dermatas, E. (2021). Wireless Motion Capture System for Upper Limb Rehabilitation. Applied System Innovation, 4(1), 14. https://doi.org/10.3390/asi4010014