1. Introduction
There are various decision stages in OR scheduling and planning. These decision stages can be classified as strategic, tactical, or operational.
The strategic stage contains long-term decisions such as capacity planning and allocation, which usually takes a long time. A problem within the strategic level is called a “case mix problem (CMP)”, in which the amount of time in OR devoted to a surgical department is defined to optimize profit/cost over a long period. Decisions such as the number and departments of surgeries to be developed and the number of resources involved could be classified into the strategic stage. The time frame of these decisions usually takes from several months to 1 year or longer.
Problems with cyclic OR schedules, such as master surgical scheduling, are classified at the tactical stage. In tactical stage problems or “master surgery scheduling (MSS) problems”, surgical specialties over the scheduling window (medium time horizon) are designated to the OR’s time slot to optimize and level resource utilization. The tactical stage (cyclic timetable) output as training is applied for decision-making in operational problems. MSS is recognized as a cyclic schedule, and it is usually monthly or quarterly. MSS allocates OR time to specialties corresponding to their specific conditions.
The last decision stage considered in this study, the operational stage, is recognized as the SCSP. In SCSP, scheduling resources and patients are usually planned, and surgical cases are scheduled for specific days and times. It is the shortest and involves resource allocation, surgical cases, and advanced scheduling decisions.
Production scheduling is a key to structural productivity, which organizes a calendar for making components/products. The scheduling problems are categorized into single machine scheduling problems (SMSP), flow shop scheduling problems (FSSP), job shop scheduling problems (JSSP), open shop scheduling problems (OSSP), and hybrid scheduling problems (HSP). In this paper, the OSSP problem is considered. The OSSP is also called moderated-JSSP between the FSSP and JSSP. The FSSP contains “” jobs, each with “” operations. The process sequences of these jobs are the same for this problem. The OSSP consists of jobs, each with at most operations. The operations of each job can be managed in any sequence. If a job consists of three operations of 1, 2, and 3, then this job can be controlled by employing any one of the following six sequences, which is n: Sequence 1: 1–2–3; Sequence 2: 1–3–2; Sequence 3: 2–1–3; Sequence 4: 2–3–1; Sequence 5: 3–1–2; and Sequence 6: 3–2–1.
This study considers the OSSP with transportation times to minimize the makespan. The number of machines or ORs is described by the parameter
, and the subscripts related to the ORs are
and l, in such a way
. Given that in an open shop scheduling problem, sequencing is not simple, and each operation can be processed on any OR, the subscript l is used to express the arrangement of ORs in parameters and decision variables. Thus,
, in which zero-OR is a virtual OR.
Figure 1 shows the suggested approach.
The parameter exemplifies the number of jobs or surgical operations, and the subscript of the surgical operations are and , in such a way that . Given that in the OSSP, the scheduling of surgical operations on ORs is still being defined, the planner’s responsibility, subscript , is to express surgical operations’ chronology in the parameters and decision variables. Therefore, , in which zero-surgical operation is a simulated surgical operation for the model.
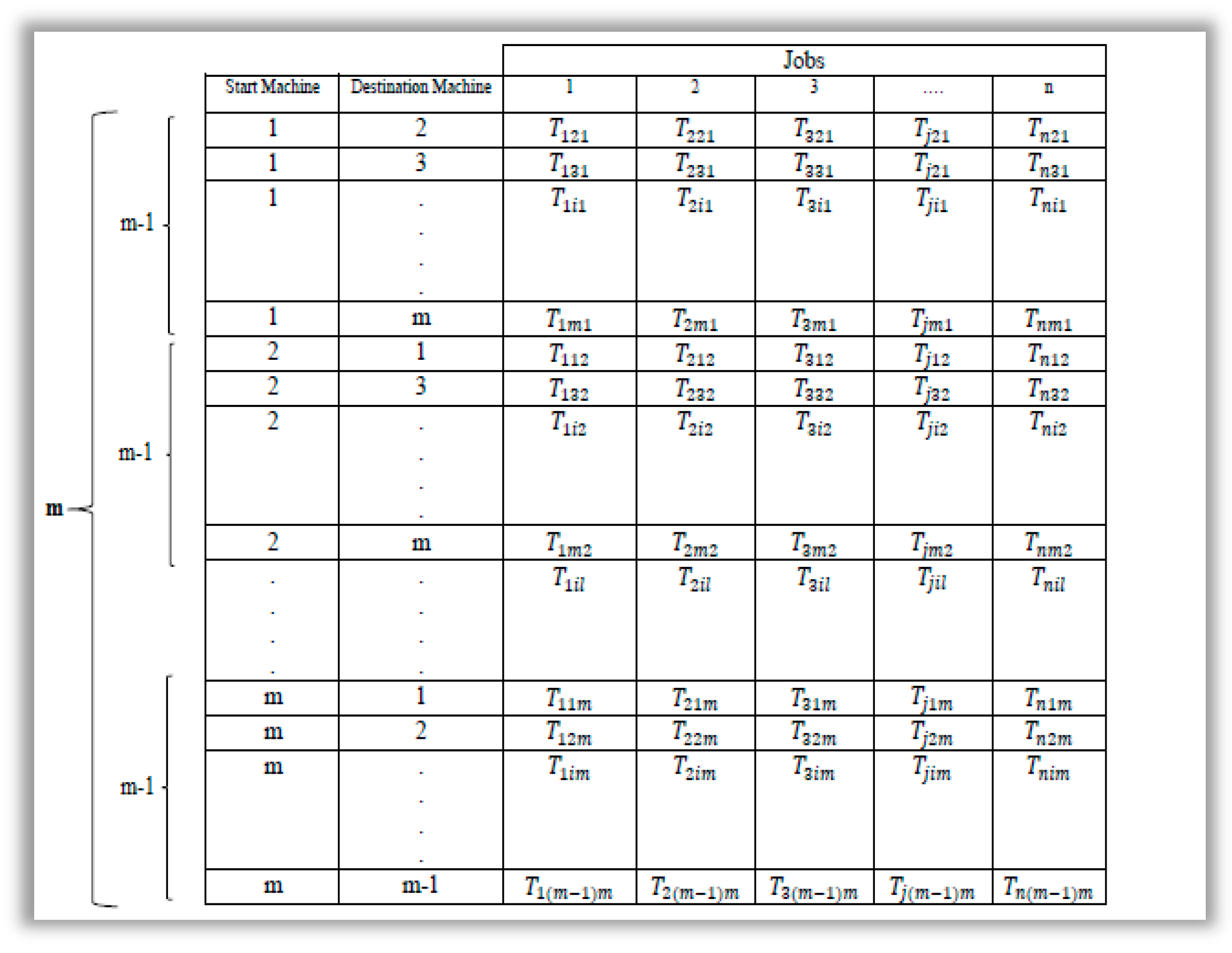
One of the primary conditions of the scheduling problem is the parameter of processing time that is characterized by and is the concept of processing time of on OR it is designed by . In this research, it is believed that the number of operations is equal to the number of ; this means that all surgical operations on all ORs perform just one operation, with the processing time of .
parameter identifies the transportation time of surgical operation from OR one to OR , and the amount of data in each problem is .
The structure of this paper is as follows.
The literature review is provided in
Section 2. A flowchart of the proposed heuristic algorithm and problem assumptions are presented in
Section 3. The scheduling problem modeling with the multi-transportation system is discussed in
Section 4. The comparison of SA metaheuristic algorithm and the heuristic algorithm in this study is considered in
Section 5. The hybrid SA algorithm is presented in
Section 6. Numerical analysis in Nova Scotia health centers is considered in
Section 7. The comparison of the hybrid SA algorithm and the SA algorithm is discussed in
Section 8. Finally, the conclusion is given in
Section 9.
2. Literature Review
The constant increase in patients and surgeries requires additional unconventional techniques to develop efficiency, particularly in creating ORs [
1,
2]. ORs are one of the most significant customer services that require high-cost resources, including human resources, equipment, and medicine [
3]. The surgery takes place in a setting of challenging advancements such as vital expenditure on health care [
4,
5], growing fees in health care costs [
6], rising surgery demand caused by aging people, and industrial developments that have increased the range of surgical interventions [
7]. OR surgery scheduling deals with characterizing the operation start times of surgeries and allocating the proposed sources to the scheduled surgeries. This allows for several constraints to secure a comprehensive surgery flow, source availability, and specialty supplies of human sources [
8,
9]. The suggested mission plays an essential role in maintaining timely medications for the patients by maintaining the stability of the hospital’s source operation [
10]. Current patient scheduling is necessary for operation research, such as multi-objective optimization. Several operation research methods [
11,
12,
13], such as a discrete-event simulation model [
14] and an optimization-based scheduling tool [
15], are used to decrease the size of the patient wait list significantly [
16]. To simplify the scheduling process, a general method is used to schedule the venesection and clinic visit one day and the infusion the following day [
17].
Sequencing and scheduling are critical decision-making processes in developing efficiency in manufacturing and services industries such as healthcare. Scheduling is a decision-making process that allocates resources to activities in given time intervals and optimizes one or more objects [
18]. Some researchers detected any scheduling problem as having one of three characteristics: the machine environment, problem conditions, and the objective function of a problem [
19,
20,
21,
22]. In the first field, the background of the problem is stated [
23,
24]; in the second field, the acronyms suggest the condition of the problem; and in the third field, the objective function of the scheduling problem is resolved. The second and third fields have numerous modes [
25]. A scheduling problem is illustrated with the triple
. Field
defines the machine environment and only contains one input. Field
includes details of process types and constraints without input or with one or more inputs. Field
defines the object which should be minimized and often has one input [
26,
27]. The initial study [
28], which offered a solving algorithm for the open-shop problem, recommended a linear time algorithm to solve open-shop problems with two machines. The objective function is minimizing the makespan. They also created a polynomial algorithm for the case where the shop has more than two machines. Preemptions are not allowed to minimize the makespan, which has been applied in several studies [
29,
30,
31,
32,
33,
34,
35]. Optimal finish time (OFT) is used in different scheduling problems to find the OFT of open-shop problems and offers a linear time algorithm to see the OFT of open-shop problems with two machines [
36,
37,
38,
39]. Preemptions were permitted to find the OFT of open-shop problems with more than two machines [
40,
41,
42]. In these problems, it is believed that the number of operations with a non-zero processing time is more than the number of machines and jobs [
43]. Some methods offered a heuristic algorithm for solving the open-shop problem with two machines and transportation times [
44,
45,
46,
47,
48,
49,
50]. In another suggested model, the transportation time between machines, as a fixed one, was described and associated with a delay time between the completion time of one operation and the start time of the following operation on the same job [
51]. The problem of an open shop with two machines and different transportation times was suggested. Two solution methods were provided; a linear time algorithm for a problem case is expected. The transportation times between machines were less than the minimum tasks’ processing times. Heuristic algorithms for a problem case in transportation times are process-dependent. They considered transportation times independent of the jobs but dependent on the route. It was believed that the transportation times depended on the distance between the shops and not on the size or weight of the jobs [
52,
53,
54]. For the first time, transportation problems are divided numerically [
55]:
They examined complexity and the results of scheduling problems in the flow shop and open shop (limited machine numbers) with transportation times; in their research, the most complex issue of the open shop was finally solved with two machines. In the multi-transportation system, there is no limitation on the number of transportation; in other words, there is no expected time or delay for transferring any halfway job from one machine to the next, and transportation is always available. In scheduling problems, based on the transportation times, there are two modes:
The transportation system in our research is based on Naderi et al. [
58]. The transportation times are dependent on jobs. According to the problem’s NP-hardness and the development of the above problem in this study, the present problem is also NP-hard. Optimization approaches [
59,
60,
61,
62], including heuristic and meta-heuristic algorithms [
63,
64,
65,
66,
67] and recently recommended well-known hybrid methods [
68,
69,
70,
71,
72,
73], are used to solve the model.
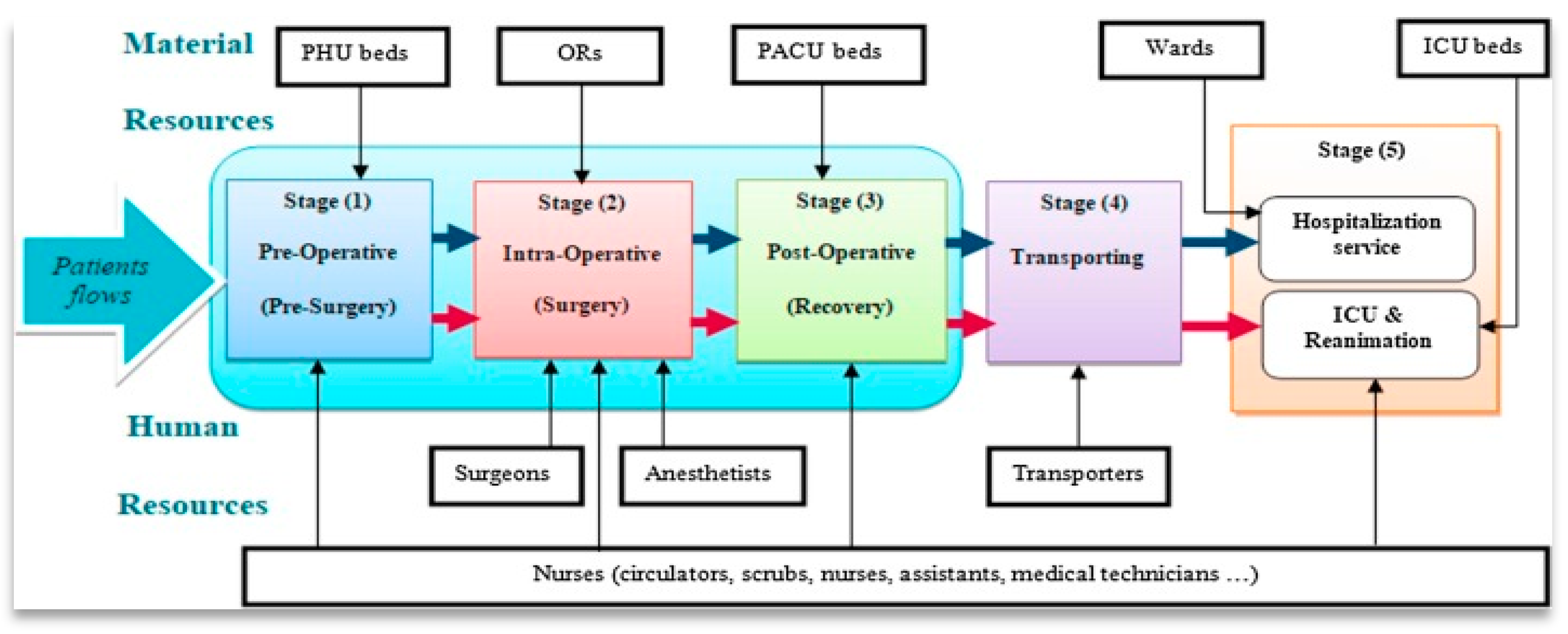
Many resources in OR are used in mathematical modeling. There are two kinds of patient arrival: elective and non-elective. Elective patients can be scheduled, while non-elective patients require surgery instantly. Considering inpatients admitted for an overnight stay, different resources, such as a post-anesthesia care unit (PHU), an OR, and intensive care units, could be applied. Measuring performance could expand to services other than an OR, such as ward, PHU, post-anesthesia care unit (PACU), and intensive care unit (ICU) [
74,
75,
76,
77,
78].
Figure 2 shows a three-step surgery procedure with the following steps: (1) pre-operative step, in which the required resources are nurses and PHU; (2) intra-operative, which is the step in which surgery will be accomplished. Surgeons, anesthetists, nurses, and ORs are required in this step. (3) Post-operative step, patients are shifted to the PACU and ICU following surgery [
78].
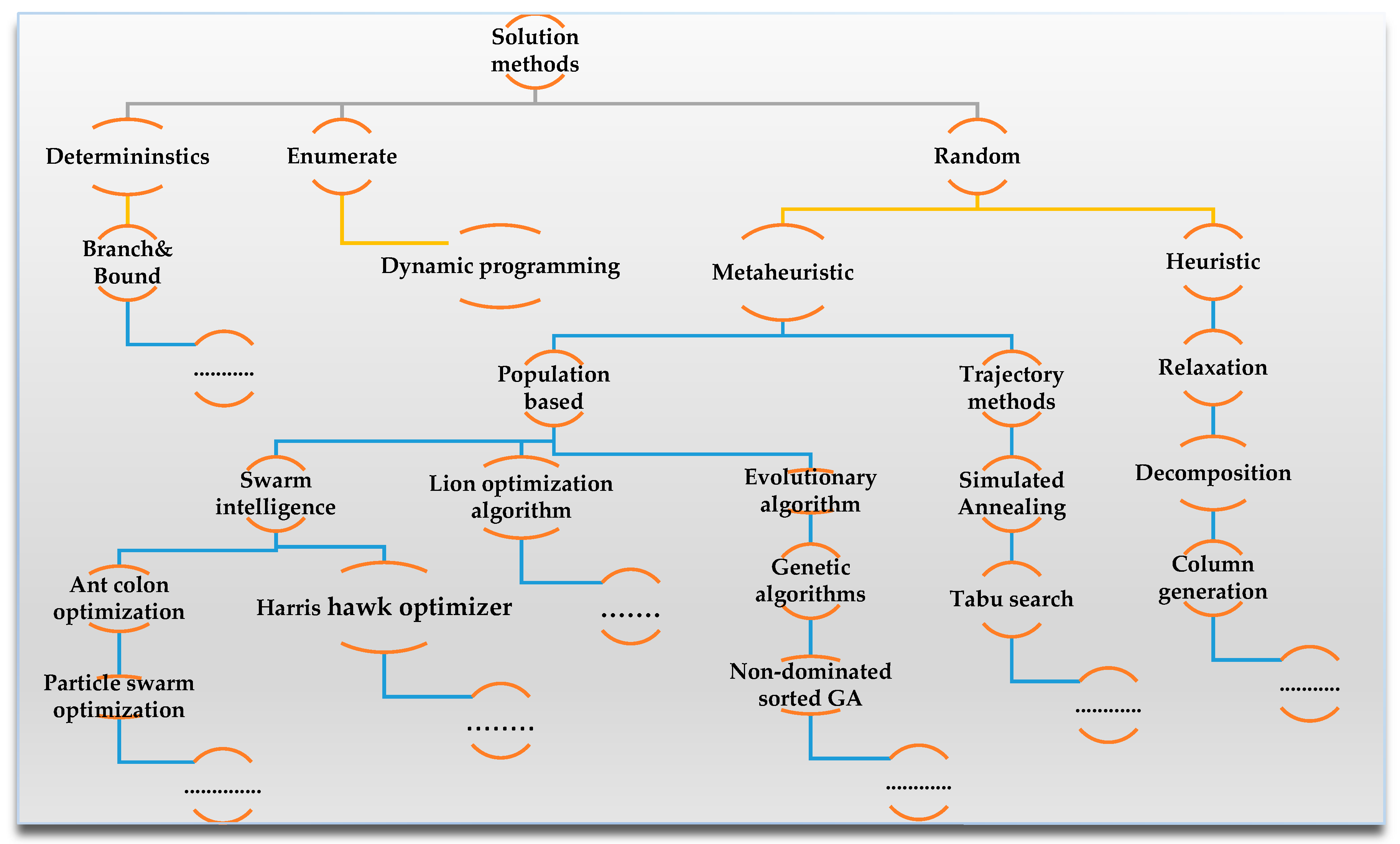
This paper considers a single-objective optimization OR problem. Thus, we want to show solution approaches for single-objective optimization OR problems.
Figure 3 categorizes optimization approaches that have been applied to OR scheduling problems. For solving OR scheduling problems, exact, evolutionary, and intelligent algorithms (such as mathematical programming, simulation, heuristic, and meta-heuristic), known as NP-hard problems, are used [
79]. For example, genetic algorithm (GA), non-dominated sorting GA II, the combination of greedy and novel meta-heuristics, SA, hybrid SA, a single-objective ant colony optimization (ACO), and a hybrid Pareto set ACO under deterministic conditions were previously applied to solve the problem. The lion optimization algorithm (LOA) and Harris hawk optimizer (HHO) are two novel population-based metaheuristics algorithms suggested for future studies. Mathematical programming or exact algorithms usually refer to solutions that always find optimal solutions. These approaches are typically applied to small-size cases unless specific mathematical methods appropriate in large-scale cases are used, such as Bender’s decomposition algorithm [
17,
80].
4. Scheduling Problem Modeling with the Multi-Transportation System
For the
binary variable, if
processes immediately after
, it takes 1; otherwise, it will be zero. Suppose on OR i, surgery operation j is processed immediately after surgery operation
. In that case, value is 1. For
binary variable, if
processes immediately after
, it takes 1; otherwise, it will be zero. Suppose surgery operation
, after being processed on OR l, is immediately processed on OR
. In that case, it will take the value of 1.
is a continuous variable representing the completion time of
on the OR
.
The object of the model is to minimize the makespan. Constraints set 1 and 2 ensure that each operation is processed once. These two constraints simultaneously refer to the assumption that the number of operations is
, and prove that any surgical operation must be processed on any OR once. Constraint set 3 refers to the chronology of operation on OR
and states that any operation on an OR has a maximum of one successor operation that is processed immediately. Constraint set 4 refers to the chronology of surgery operation j on ORs and states that the surgery operation
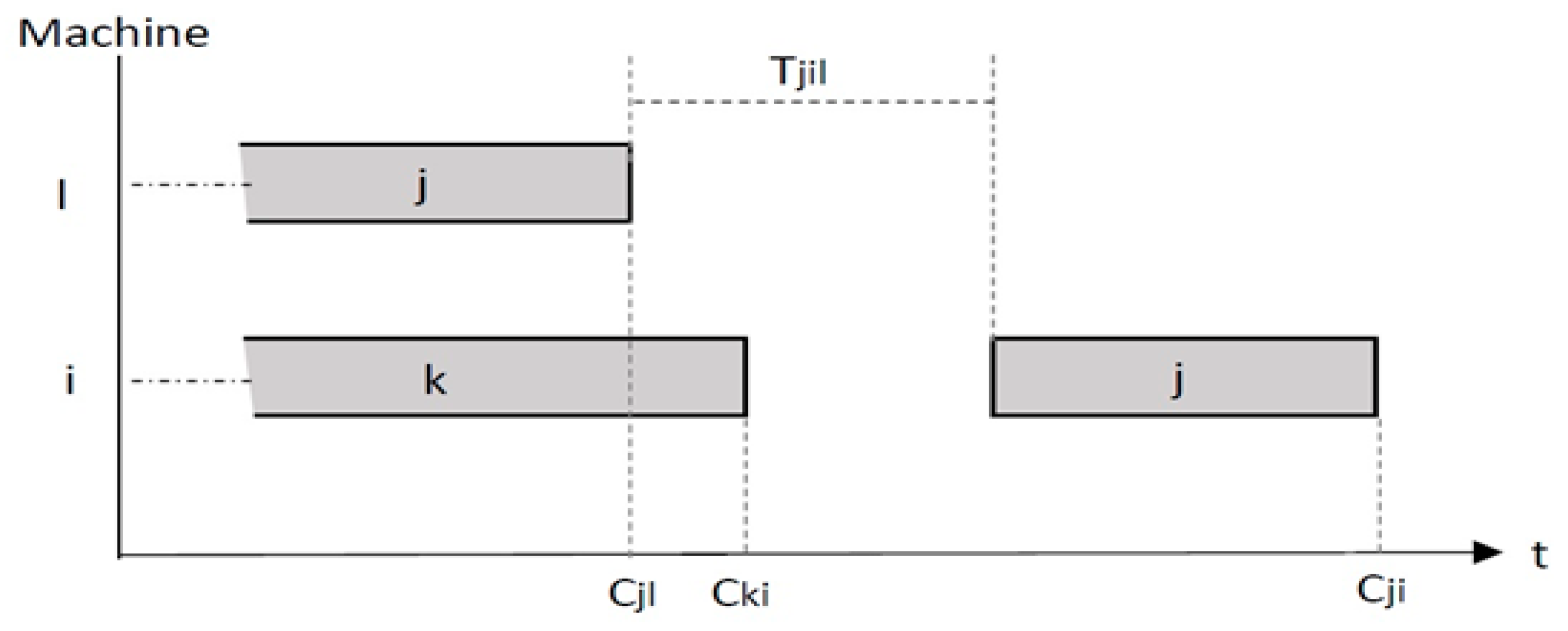
, after the operation on any OR, has a maximum of one successor operation on another OR that is processed immediately. It should be noted that the term “maximum” has been used since the last operation of any surgical operation in scheduling problems does not follow any successor. Constraints 5 and 6 ensure that after zero virtual surgery operations and zero virtual ORs, exactly one operation is processed immediately. Constraints 7 and 8 ensure that an operation cannot be completed simultaneously before and after another operation. Eventually, one operation can be immediately before or immediately after another operation. Two operations can also have no “immediate” chronology relationships. Constraint set 9 implies that if
is immediately processed after
, , completion time will be more than
completion time. In other words, this constraint indicates that the minimum completion time of
on OR
is equal to the total completion time of this surgery operation on the previous OR (l) and the time of being transferred to OR
, and the time of being processed on the OR
.
Figure 5 shows the output of constraint 9 (as mentioned before, the machine is the same as OR).
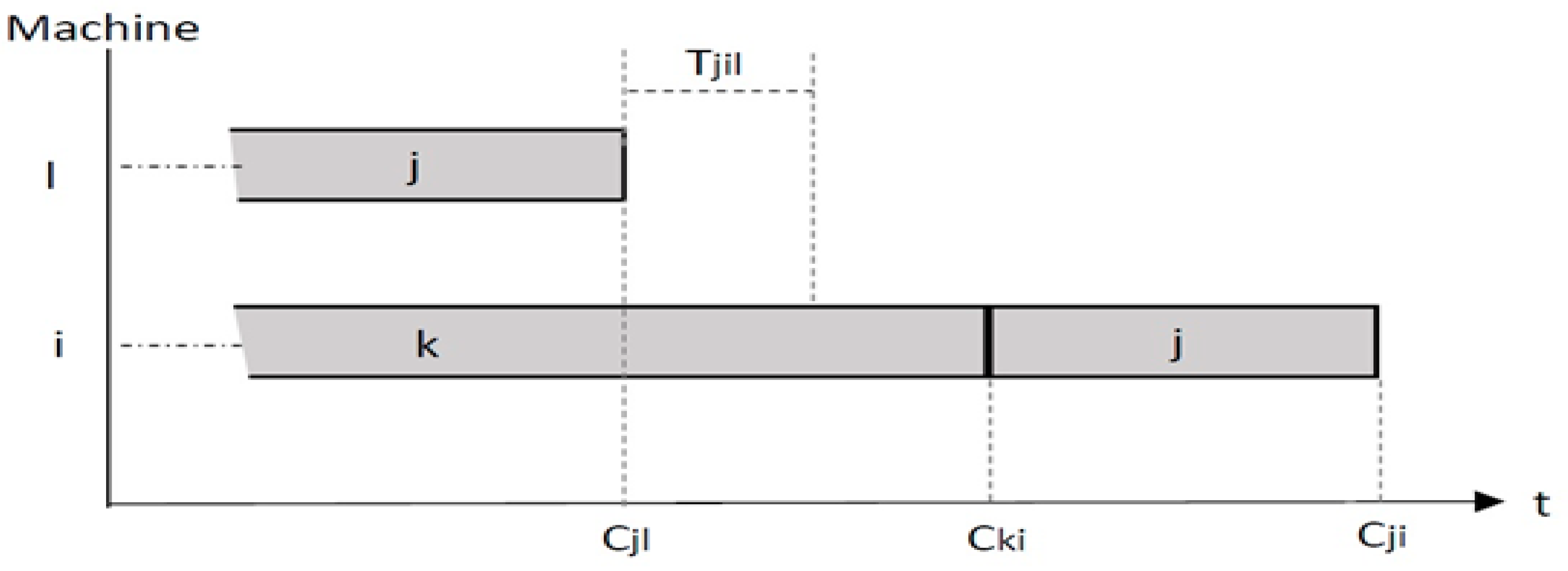
Constraint set 10 implies that if the operation
is processed immediately after
on the OR
,
,
completion time will be more than
completion time. In other words, this constraint indicates that the minimum completion time of
on OR
equals the total completion time of its previous surgery operation on the same OR and its processing time on OR
. It should be noted that the existence of these two constraints simultaneously in the model makes
obtain the maximum output value of the two constraints.
Figure 6 shows the output of constraint 10.
Constraints 11 and 12 define the makespan. Constraints 13 and 14 represent the decision variable of completion time of surgical operation in OR , which always has a minimum value of zero. Constraints 15 and 16 are constraints of binary decision variables.
5. Metaheuristic and Heuristic Algorithms in This Study
The SA metaheuristic algorithm and a comparison of SA with the suggested heuristic algorithm are considered in this section.
5.1. Proposed SA Algorithm
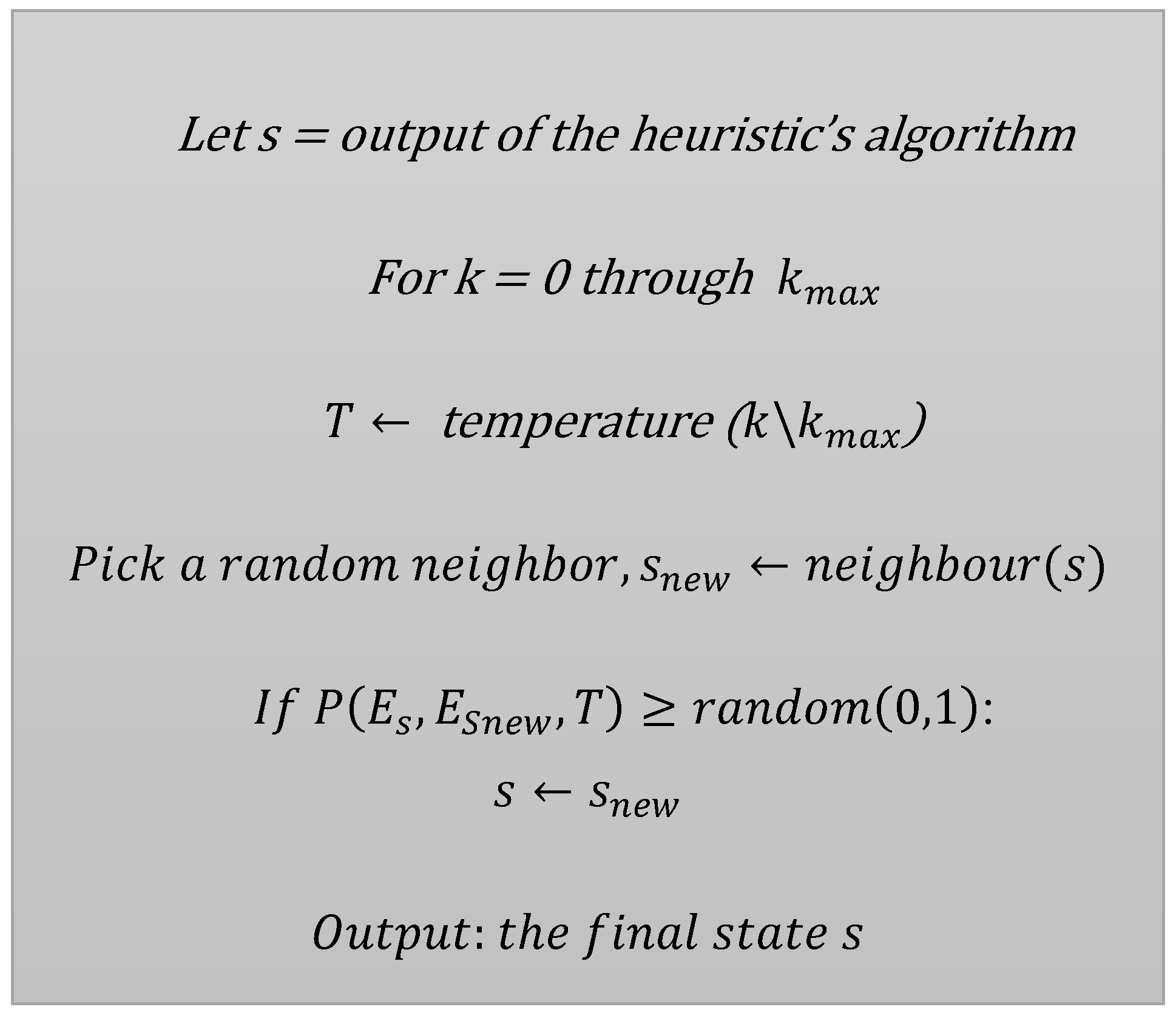
A SA algorithm is a simple and effective optimization metaheuristic algorithm to solve optimization problems. The basic information for starting the SA algorithm is as follows.
The initial temperature (
) in which the algorithm starts to work must be set up at the beginning of the algorithm, and the Boltzmann probability function generates the value of 1. In other words, at the beginning of the algorithm, the answers of the worst neighbor will be accepted with a probability of 1. They will decline to zero gradually [
81]. The temperature reduction rate (α) is considered in the following equation [
82].
where
and α signify the temperature in the repetition of h and the rate of decrease in temperature, respectively.
In this study, the initial temperature is considered and the temperature decrease rate is 0.98.
How to display the answer applied in this paper is in the form of a matrix with a row and column. The elements of this matrix are members of the set ; each indicating a scheduling operation.
Based on the recommended answer description, each problem can have answer modes; the SA algorithm will reach an optimized answer by searching the neighborhood based on initial response. To search for neighbors, we need operators to obtain the final solution by modifying the answers.
In this algorithm, to accelerate the search for finding a better answer, three operators of swap, reversion, and insertion are employed to select the neighborhood.
5.2. Solving the Problem Using the Suggested Heuristic Algorithm and SA Algorithm
In this section, problems with different values have been created to evaluate heuristic and metaheuristic algorithms, and their solution will be presented by coding in MATLAB software. Each problem has been run five times, and the best results are offered.
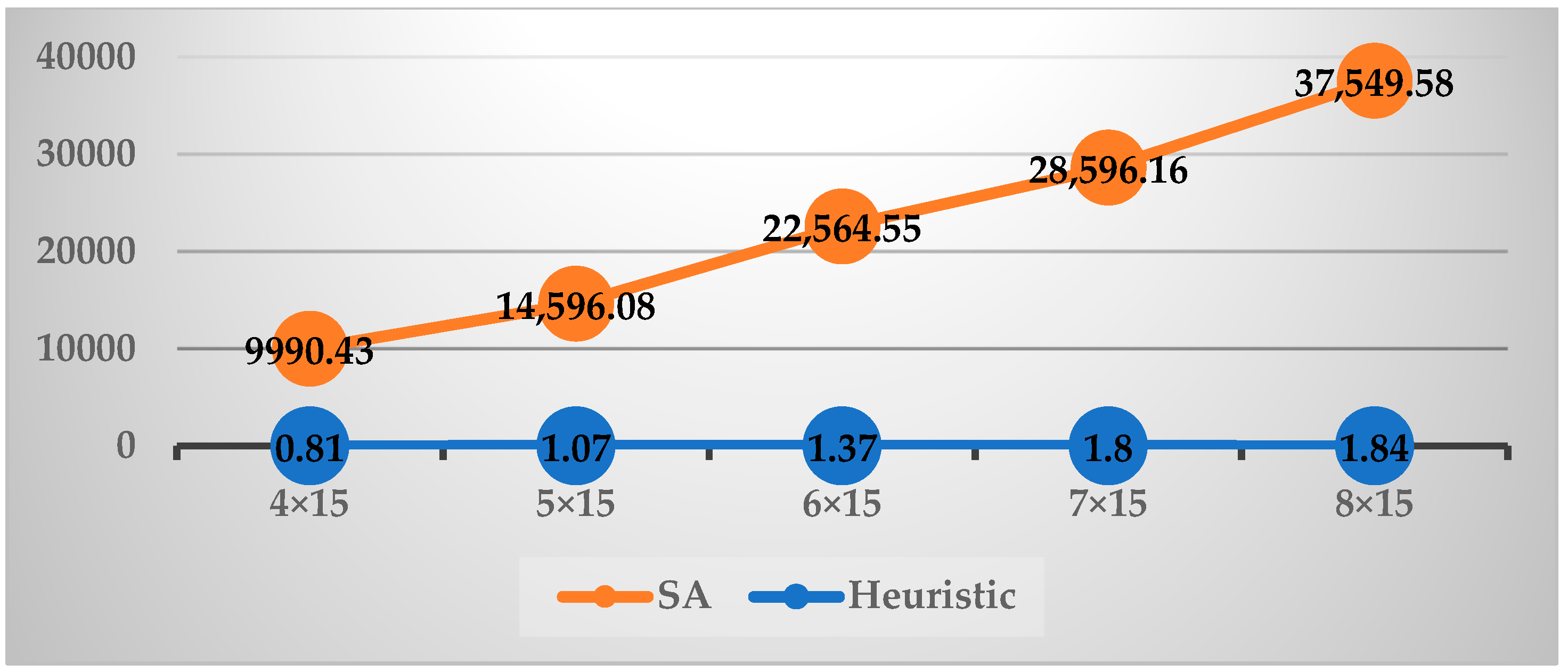
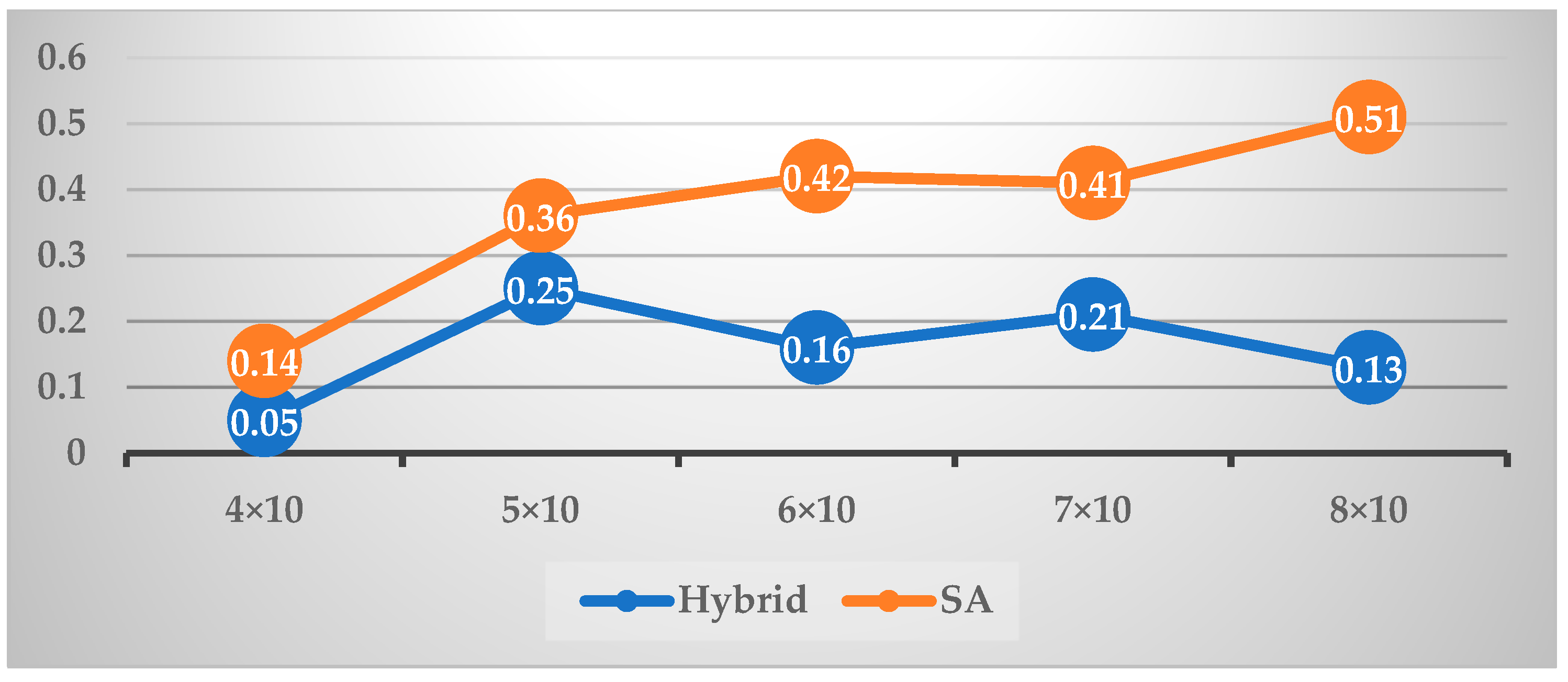
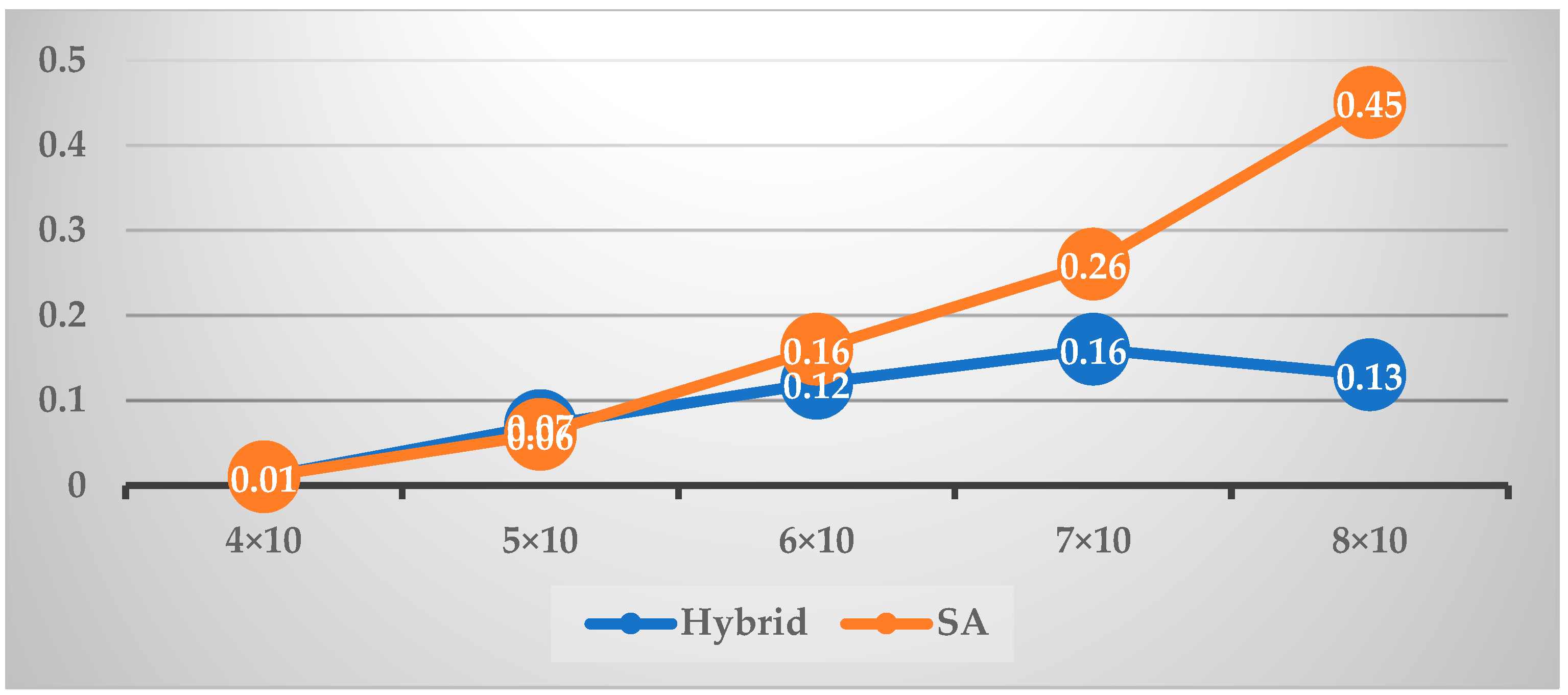
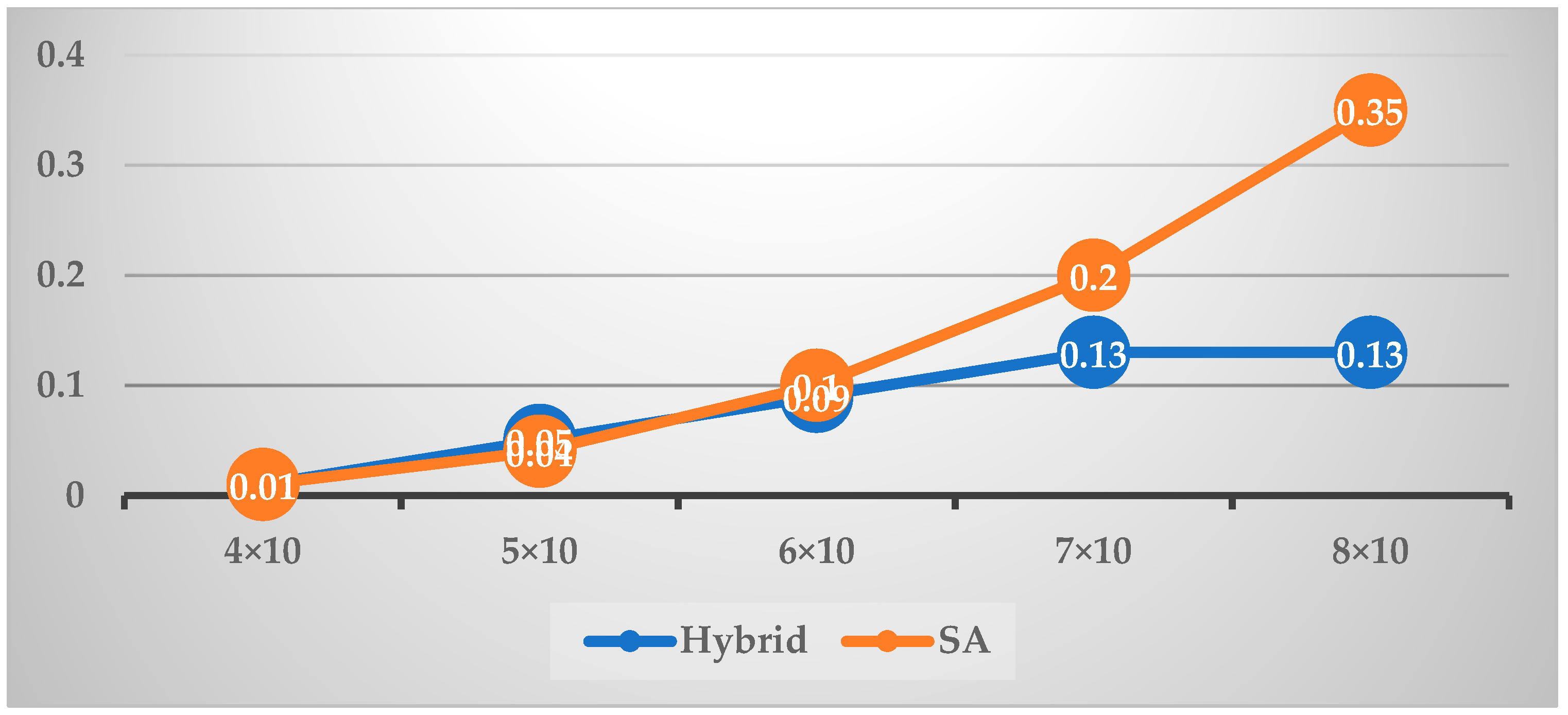
The SA algorithm acts by the use of a point-based system. It generates a random answer and, by analyzing the neighborhood of that answer, seeks an optimal answer. As shown in
Table 1 and
Figure 7, the SA algorithm reaches the response of the heuristic algorithm after passing a considerable time on any scale of the problem. For example, on a scale of
, the SA algorithm reaches the answer of the heuristic algorithm after approximately 24,000 s, while the heuristic algorithm finds the same result after about 0.2 s.
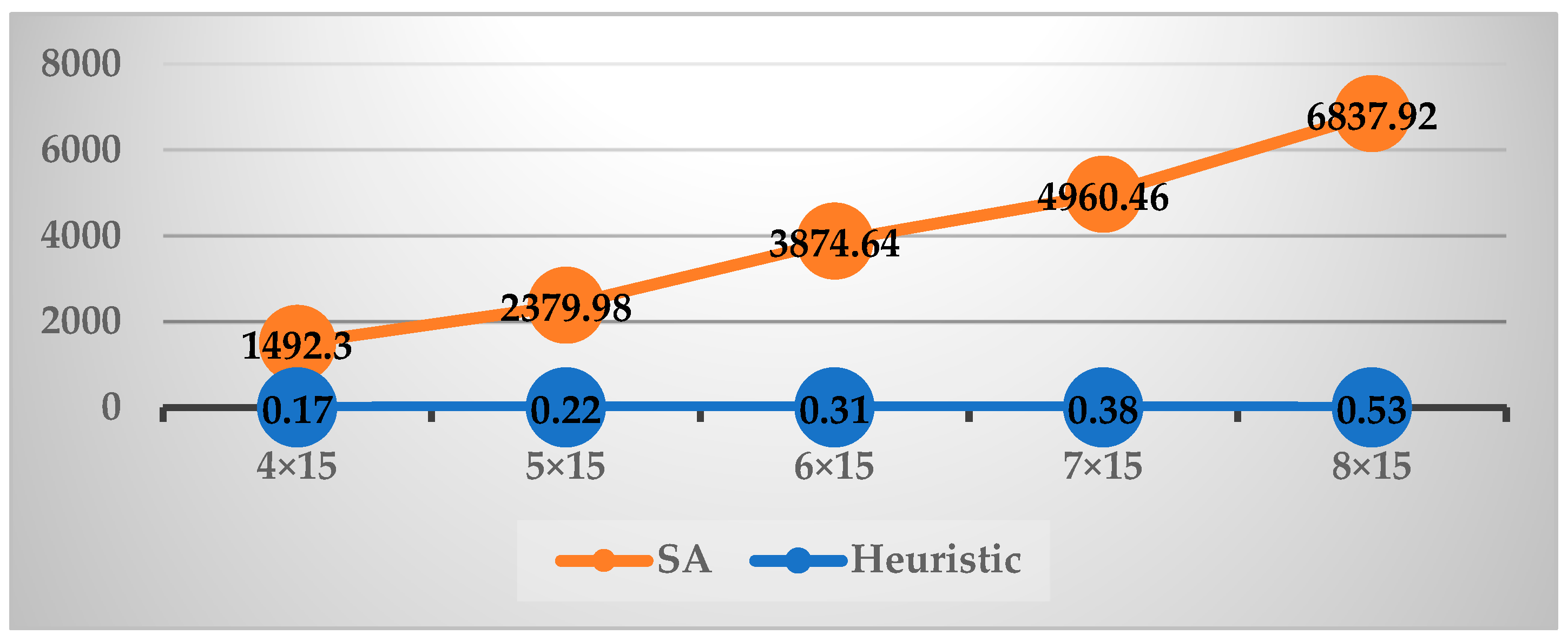
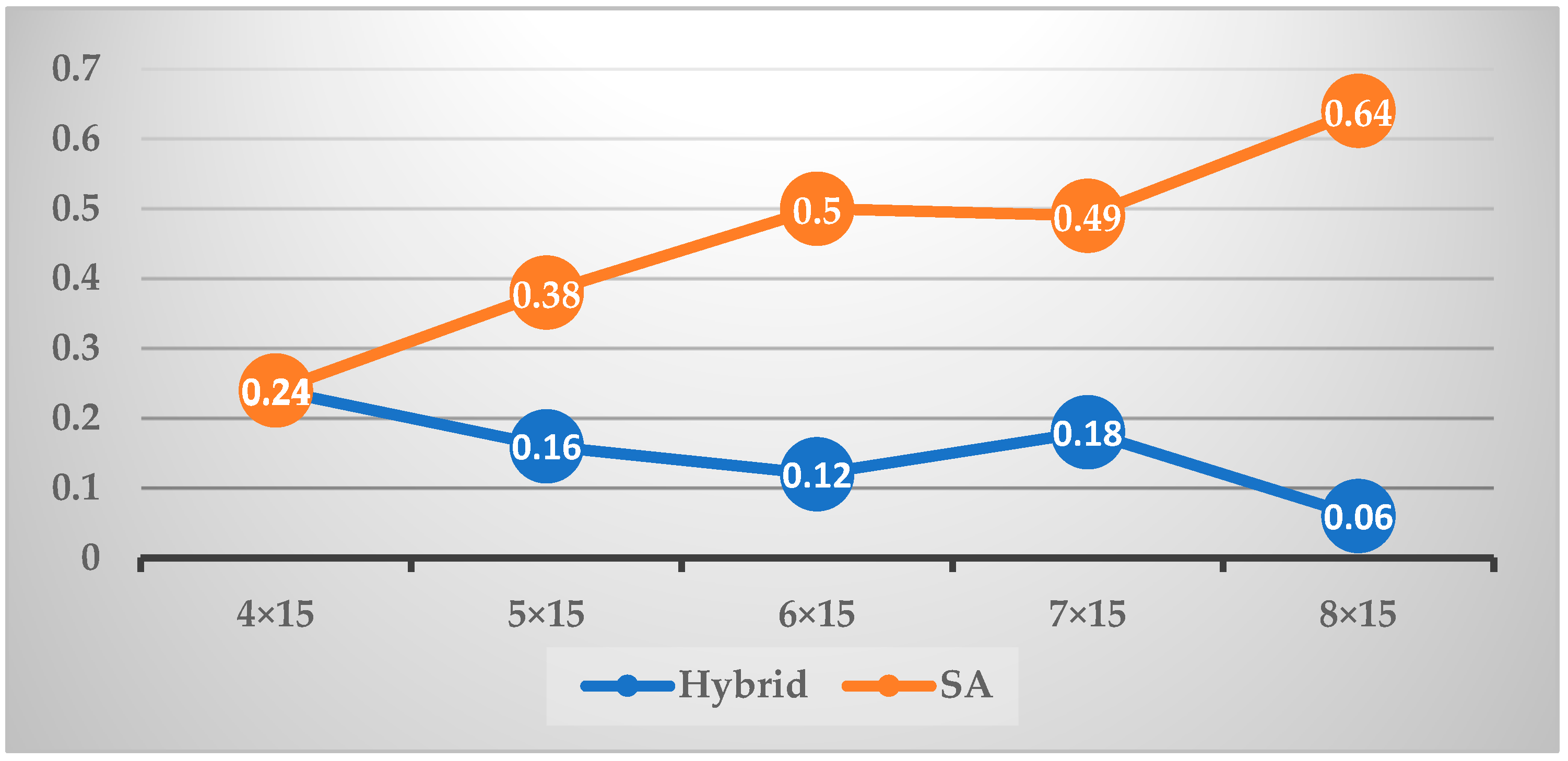
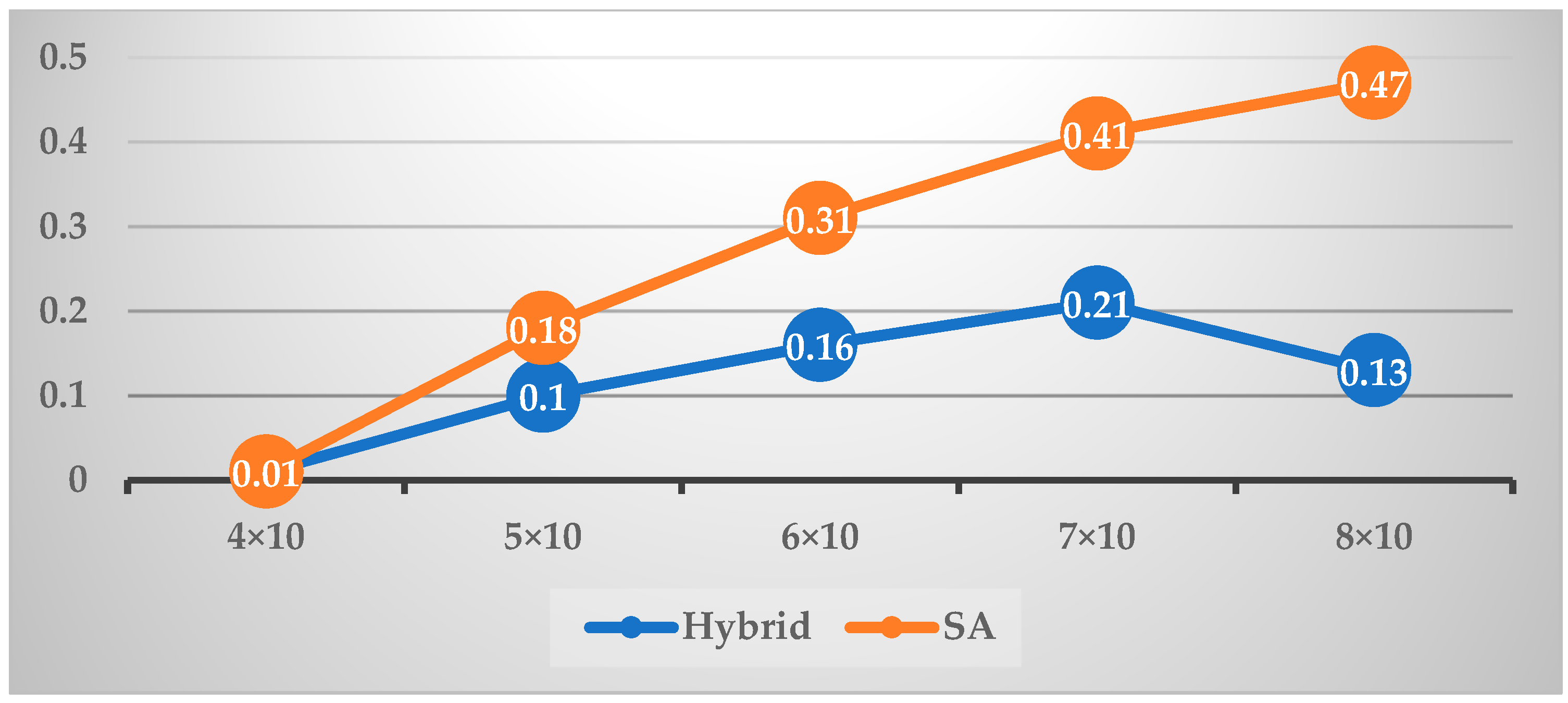
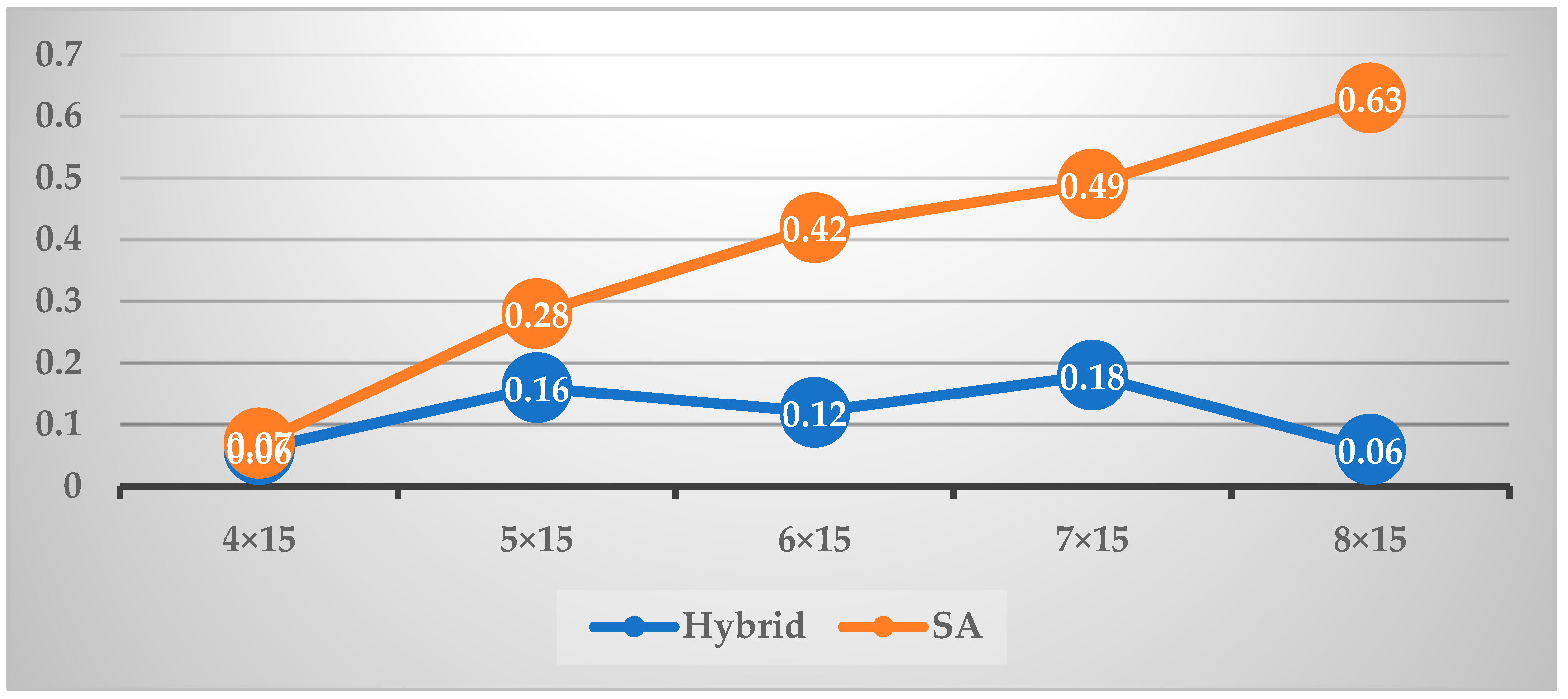
As shown in
Table 2 and
Figure 8, the SA algorithm reaches the response of the heuristic algorithm after passing a considerable time on any scale of the problem. For example, on a scale of
, the SA algorithm reaches the answer of the heuristic algorithm after approximately 14,000 seconds, while the heuristic algorithm finds the same result after about 1 second. In this regard, introducing a hybrid SA algorithm and a comparison of SA and hybrid SA algorithms are presented in the following sections, respectively.
9. Conclusions
This paper dealt with a novel NWOSP-SCSP case of open-shop problems under makespan minimization with the transportation times for OR as a single objective model based on MILP. Since the optimization of OR problems is an NP-hard optimization problem, we assessed mathematical and metaheuristic methods to address OR optimization problems. Problem modeling was described in the context of a multi-transportation system. Two computational experiments were considered to evaluate the performances of MILP, heuristic, SA metaheuristic, and a hybrid algorithm. In the first experiment, we generated small-sized instances by which we compared the mathematical models and evaluated the general performance of the proposed metaheuristics. In the second experiment, the potential of metaheuristics to solve some benchmarks in the literature of pure open shops was further assessed. A heuristic algorithm was created to solve problems of different sizes, and its performance was compared with the SA algorithm. The results of these two algorithms led to the presentation of a novel hybrid SA algorithm. With a hypothesis test in different quarters, its performance was evaluated. The hypothesis test is used in four parts of the algorithm’s performance to assess the SA and hybrid SA algorithms. Thus, the first hypothesis test was used in all quarters of the function of the two algorithms, and in this test, the H0 assumption was rejected. In other words, the two algorithms have a significant difference. After reaching the results with a numerical analysis in Nova Scotia health authority hospitals and health centers, the results of the evaluations show the remarkable superiority of the hybrid SA algorithm. Finally, all the results proved that the models and metaheuristics effectively tackled the NWOSP-SCSP approach, which will be a new perspective in future literature reviews.
Future Study
This research assumes that the number of surgical operations equals the number of ORs. In other words, each surgical operation is processed exactly in each OR. A situation where the number of operations differs from the number of ORs is suggested for consideration in future studies. For example, one or more surgical operations will not be processed in one or more ORs. Solving the problem with other metaheuristic algorithms and comparing them with the SA algorithm results is also suggested. In the present study, a heuristic algorithm was presented for solving problems and was compared with the SA algorithm, and finally, a hybrid SA algorithm was suggested to obtain the best results; some studies to find an algorithm for solving problems are suggested if there is single transportation (ST) between each OR. As interesting future research, one could study a multi-objective no-wait open shop in surgical case scheduling problems. Another exciting research direction is considering branch-and-bound or other exact methods. A comprehensive review of bi-objective and multi-objective OR scheduling is recommended. Finally, further research on developing novel and hybrid strategies for delivering an actual problem is suggested.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}