
Optimal Lyapunov-Based Sliding Mode Control for Slotless-Self Bearing Motor System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
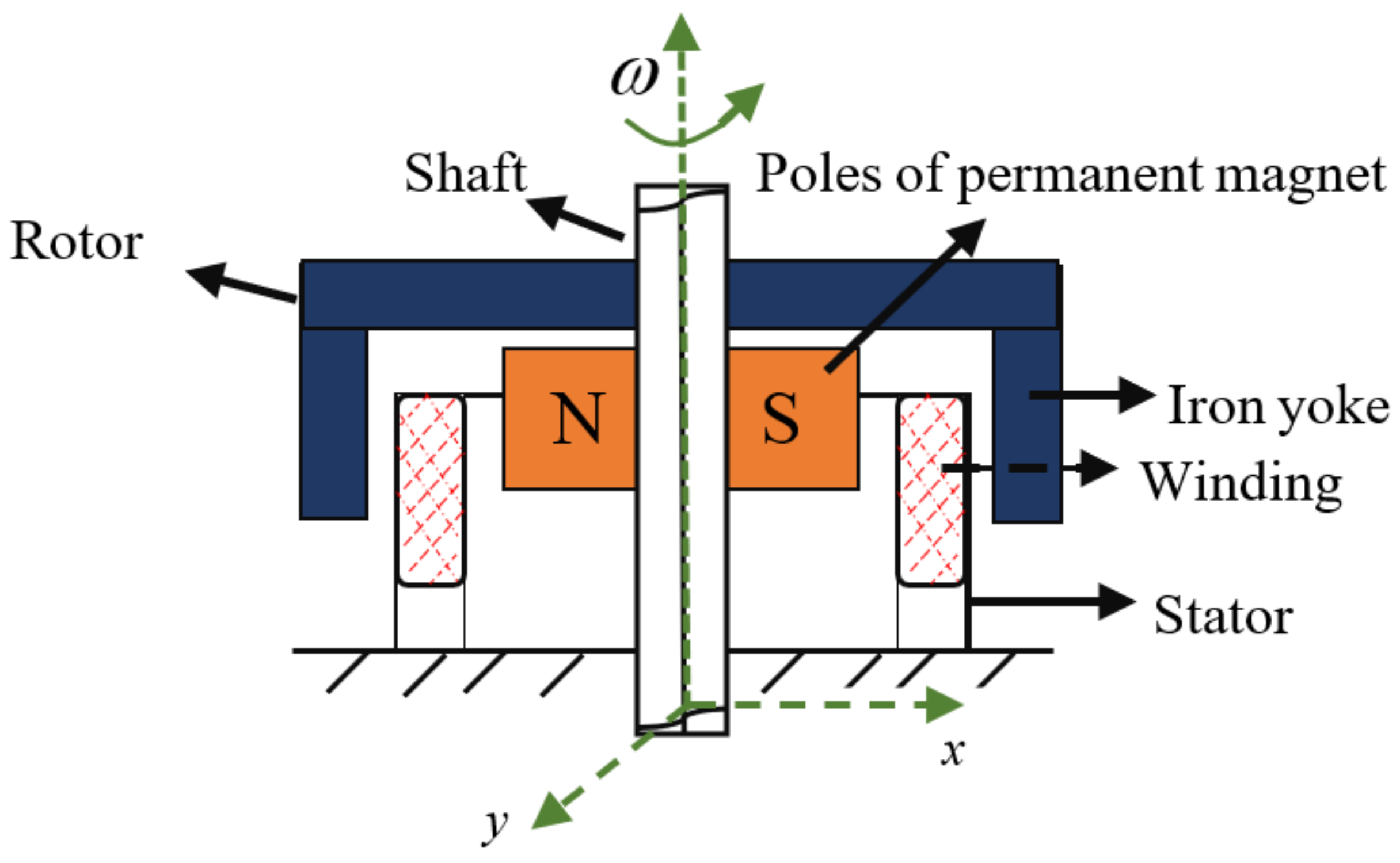
2. Mathematical Model of the SSBM
3. Proposed Approach
3.1. The OLB-SMC for ω-Axis
3.2. The OLB-SMC for the x-Axis
3.3. The OLB-SMC for the y-Axis
3.4. Stability Analysis
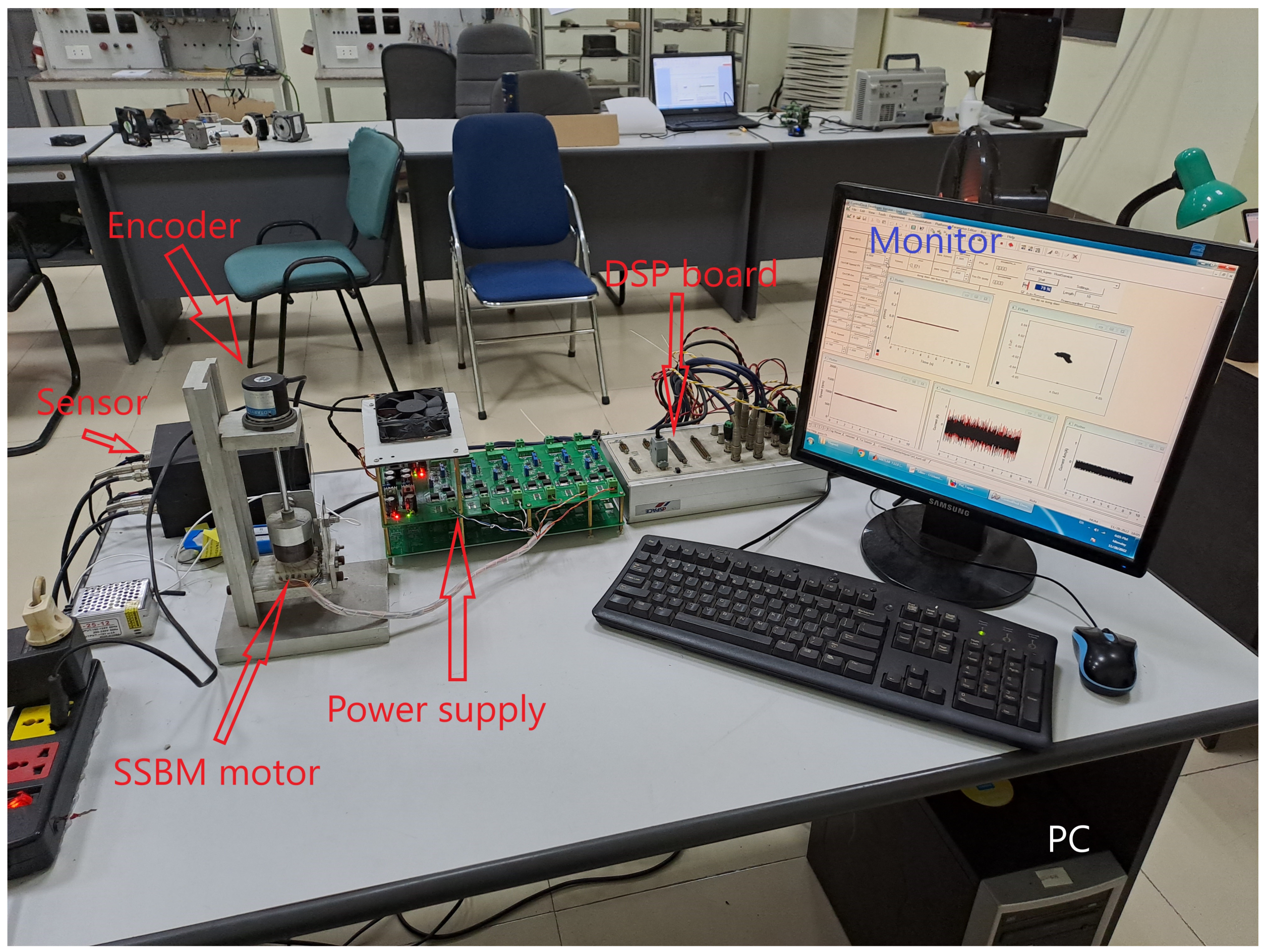
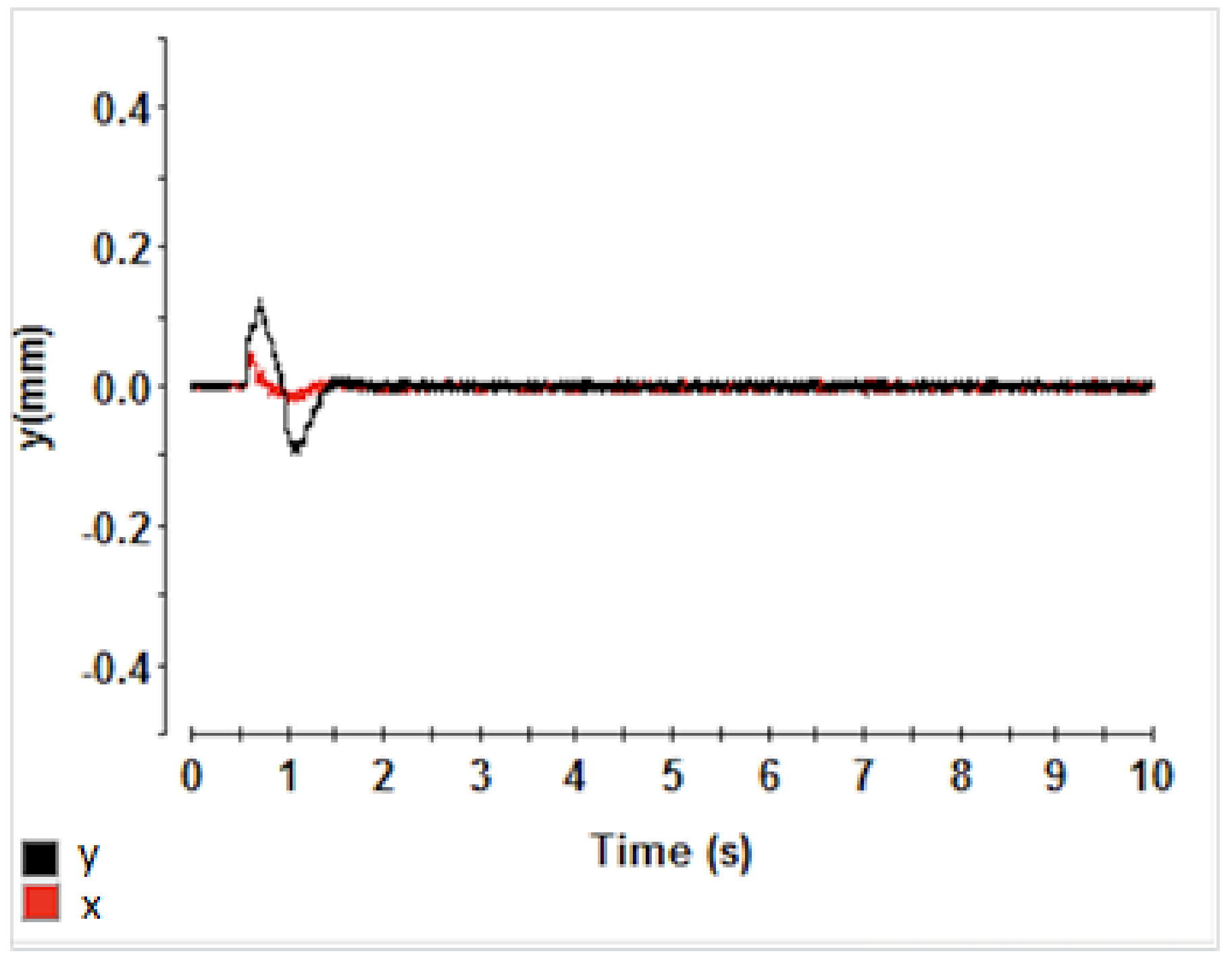
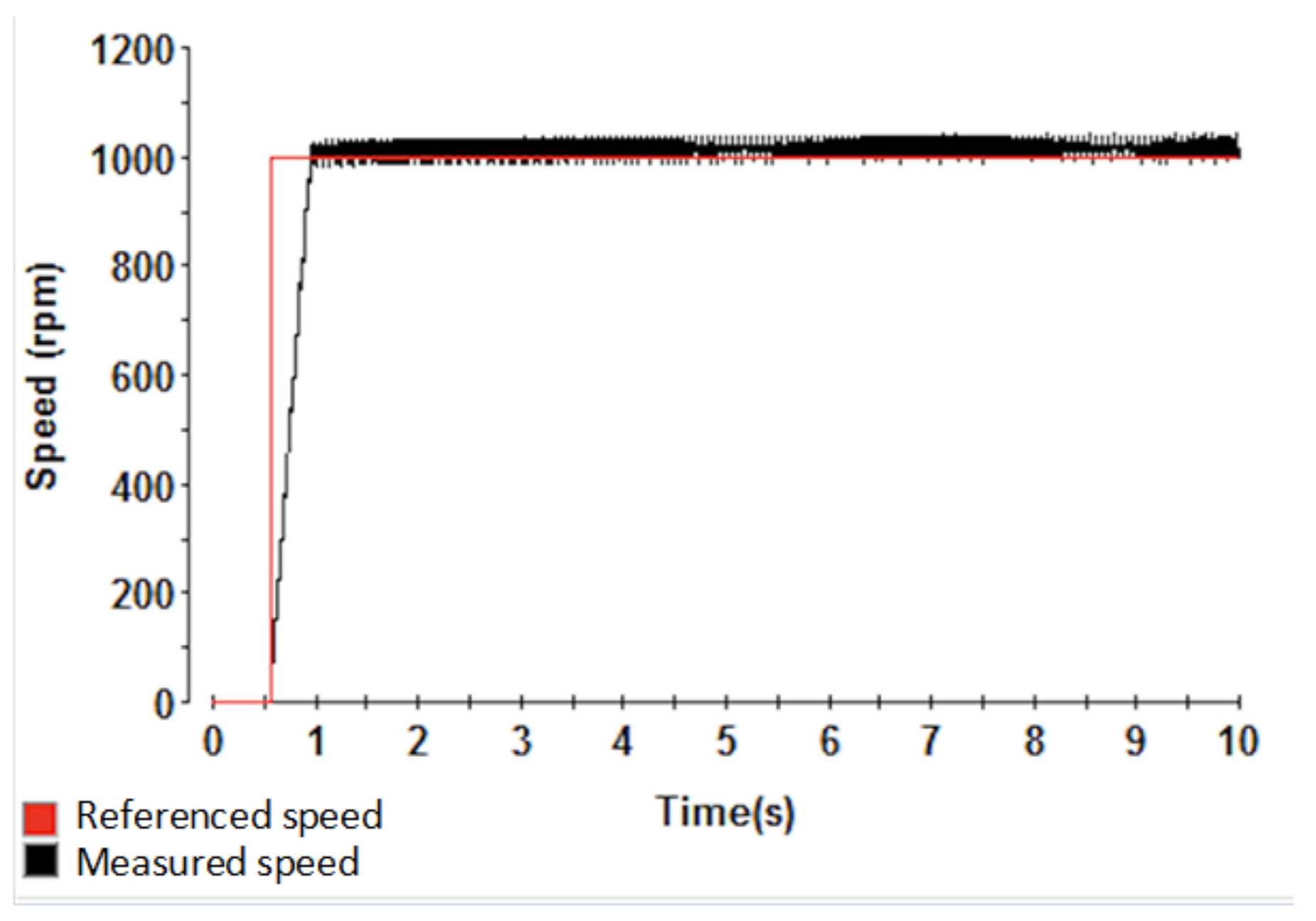
4. An Illustrative Example
- Case 1: (rpm)




- Case 2: (rpm)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Steinert, D.; Nussbaumer, T.; Kolar, J.W. Slotless bearingless disk drive for high-speed and high-purity applications. IEEE Trans. Ind. Electron. 2014, 61, 5974–5986. [Google Scholar] [CrossRef]
- Steinert, D.; Nussbaumer, T.; Kolar, J.W. Evaluation of One- and Two-Pole-Pair Slotless Bearingless Motors with Toroidal Windings. IEEE Trans. Ind. Appl. 2016, 52, 172–180. [Google Scholar] [CrossRef]
- Ueno, S.; Kato, T. A Novel Design of a Lorentz-Force-Type Small Self Bearing Motor. In Proceedings of the 8th International Conference on Power Electronics and Drive Systems, Taipei, Taiwan, 2–5 November 2009; pp. 926–931. [Google Scholar]
- Ueno, S.; Uematsu, S.; Kato, T. Development of a Lorentz-Force-Type Slotless Self-Bearing Motor. J. Syst. Des. Dyn. 2009, 3, 462–470. [Google Scholar] [CrossRef] [Green Version]
- Ueno, S.; Iseki, R.; Jiang, C. Stability of a tilt-controlling axial gap self-bearing motor with single-stator. Mech. Eng. J. 2017, 4, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.D.; Nguyen, H.P.; Vo, D.N.; Nguyen, X.B.; Ueno, S.; Huang, S.-C.; Giap, V.N. Robust Sliding Mode Control-Based a Novel Super-Twisting Disturbance Observer and Fixed-Time State Observer for Slotless-Self Bearing Motor System. IEEE Access 2022, 10, 23980–23994. [Google Scholar] [CrossRef]
- Nguyen, Q.; Nguyen, H.; Nguyen, K.; Vo, D.; Nguyen, X.; Ueno, S.; Giap, V. Robust Sliding Mode Control for Slotless-Self Bearing Motor System. J. Electr. Eng. Technol. 2022, 1–15. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Ueno, S. Modeling and control of salient-pole permanent magnet axial gap self-bearing motor. IEEE/ASME Trans. Mecha 2011, 16, 518–526. [Google Scholar] [CrossRef]
- Nguyen, H.P.; Nguyen, X.B.; Bui, T.T.; Ueno, S.; Nguyen, Q.D. Analysis and control of slotless self-bearing motor. Actuators 2019, 8, 57. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.D.; Ueno, S. Analysis and control of non-salient permanent magnet axial-gap self-bearing motor. IEEE Trans. Ind. Electron. 2011, 58, 2644–2652. [Google Scholar] [CrossRef]
- Nevaranta, N.; Jaatinen, P.; Vuojolainen, J.; Sillanpää, T.; Pyrhönen, O. Adaptive MIMO pole placement control for commissioning of a rotor system with active magnetic bearings. Mechatronics 2020, 65, 102313. [Google Scholar] [CrossRef]
- Giap, V.N.; Huang, S.-C. Effectiveness of fuzzy sliding mode control boundary layer based on uncertainty and disturbance compensator on suspension active magnetic bearing system. Meas. Control 2020, 53, 934–942. [Google Scholar] [CrossRef] [Green Version]
- Giap, V.N.; Huang, S.-C.; Nguyen, Q.D.; Trinh, X.T. Time varying disturbance observer based on sliding mode control for active magnetic bearing system. In Proceedings of the International Conference Material, Machines and Methods for Sustainable Development, Nha Trang, Vietnam, 12–14 November 2020; pp. 929–935. [Google Scholar]
- Giap, V.N.; Huang, S.-C. Generalized proportional integral disturbance observer-based fuzzy sliding mode control for active magnetic bearing system. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1113, p. 012006. [Google Scholar]
- Su, T.-J.; Kuo, W.-P.; Giap, V.-N.; Quan Vu, H.; Nguyen, Q.-D. Active Magnetic Bearing System Using PID-surface Sliding Mode Control. In Proceedings of the 2016 Third International Conference on Computing Measurement Control and Sensor Network (CMCSN), Matsue, Japan, 20–22 May 2016; pp. 5–8. [Google Scholar] [CrossRef]
- Tsai, T.S.H.; Su, T.J.; Cheng, J.-C.; Lin, Y.-Y.; Giap, V.-N.; Guo, S.M.; Shieh, L.S. Robust observer-based optimal linear quadratic tracker for five-degree-of freedom sampled-data active magnetic bearing system. Int. J. Syst. Sci. 2018, 49, 1273–1299. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Ueno, S. Sensorless speed control of inset type axial gap self-bearing motor using extended EMF. In Proceedings of the 2010 International Power Electronics Conference-ECCE ASIA -, Sapporo, Japan, 21–24 June 2010; pp. 2260–2264. [Google Scholar] [CrossRef]
- Nguyen, D.Q.; Ueno, S. Sensorless speed control of a permanent magnet type axial gap self-bearing motor. J. Syst. Des. Dyn. 2009, 3, 494–505. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Ueno, S. Improvement of sensorless speed control for nonsalient type axial gap self-bearing motor using sliding mode observer. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 373–378. [Google Scholar]
- Nguyen, Q.D.; Ueno, S. Novel Approach in Sensorless Speed Control of Salient Axial-Gap Self-Bearing Motor Using Extended Electromotive Force. IEEJ Trans. Ind. Appl. 2011, 131, 1023–1028. [Google Scholar] [CrossRef]
- Borque Gallego, G.; Rossini, L.; Achtnich, T.; Araujo, D.M.; Perriard, Y. Efficiency Optimization of Slotless Magnetic-Bearing Machines. IEEE Trans. Ind. Appl. 2021, 57, 6833–6843. [Google Scholar] [CrossRef]
- Geng, W.; Zhang, Z. Investigation of a New Ironless-Stator Self-Bearing Axial Flux Permanent Magnet Motor. IEEE Trans. Magn. 2016, 52, 8105104. [Google Scholar] [CrossRef]
- Gallego, G.B.; Rossini, L.; Achtnich, T.; Zwyssig, C.; Araujo, D.M.; Perriard, Y. Force Analysis of a Slotless Lorentz-Type Active Magnetic Bearing Actuator. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Republic of Korea, 7–10 October 2018; pp. 75–80. [Google Scholar] [CrossRef]
- Okada, Y.; Dejima, K.; Ohishi, T. Analysis and comparison of PM synchronous motor and induction motor type magnetic bearings. IEEE Trans. Ind. Appl. 1995, 31, 1047–1053. [Google Scholar] [CrossRef]
- Ren, Z.; Stephens, L.S. Closed-loop performance of a six degree-offreedom precision magnetic actuator. IEEE/ASME Trans. Mechatronics 2005, 10, 666–674. [Google Scholar] [CrossRef]
- Schneider, T.; Binder, A. Design and evaluation of a 60.000 rpm permanent magnet bearingless high speed motor. In Proceedings of the 7th International Conference on Power Electronics and Drive Systems, Daegu, Republic of Korea, 22–26 October 2007; pp. 1–8. [Google Scholar]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1997, 22, 1997. [Google Scholar] [CrossRef]
- Chyun, C.F. Variable thickness boundary layers for sliding mode control. J. Mar. Sci. Technol. 2008, 16, 288–294. [Google Scholar]
- Huy, V.Q.; Binh, T.N. Adaptive Terminal Sliding Mode Control by Identifying Uncertain and Mutated Disturbance with Reference Model. J. Electr. Eng. Technol. 2020, 15, 1789–1796. [Google Scholar] [CrossRef]
- Wen, Y.; Li, G.; Wang, Q.; Guo, X. Robust adaptive sliding-mode control for permanent magnet spherical actuator with uncertainty using dynamic surface approach. J. Electr. Eng. Technol. 2019, 14, 2341–2353. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y.; Jin, Y. Optimization of Urban Rail Automatic Train Operation System Based on RBF Neural Network Adaptive Terminal Sliding Mode Fault Tolerant Control. Appl. Syst. Innov. 2021, 4, 51. [Google Scholar] [CrossRef]
- Zhang, X.; Song, C. Robust Controller Decorated by Nonlinear S Function and Its Application to Water Tank. Appl. Syst. Innov. 2021, 4, 64. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Pham, D.H.; Huang, S.C. Fast Speed Convergent Stability of TS Fuzzy Sliding-Mode Control and Disturbance Observer for a Secure Communication of Chaos-Based System. IEEE Access 2022, 10, 95781–95790. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Nguyen, H.P.; Trung, N.K.; Ueno, S.; Huang, S.C.; Giap, V.N. Fixed-time disturbance observer based on fractional-order state observer and super-twisting sliding mode control for a class of second-order of slotless self-bearing motor. Int. J. Dyn. Control 2022, 1–17. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Giap, V.N.; Huang, S.C. Inversed model-based disturbance observer base on adaptive fast convergent sliding mode control and fixed-time state observer for slotless self-bearing motor. Symmetry 2022, 14, 1206. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trinh, M.H.; Pham, Q.D.; Giap, V.N. Optimal Lyapunov-Based Sliding Mode Control for Slotless-Self Bearing Motor System. Appl. Syst. Innov. 2023, 6, 2. https://doi.org/10.3390/asi6010002
Trinh MH, Pham QD, Giap VN. Optimal Lyapunov-Based Sliding Mode Control for Slotless-Self Bearing Motor System. Applied System Innovation. 2023; 6(1):2. https://doi.org/10.3390/asi6010002
Chicago/Turabian StyleTrinh, Minh Hiep, Quang Dang Pham, and Van Nam Giap. 2023. "Optimal Lyapunov-Based Sliding Mode Control for Slotless-Self Bearing Motor System" Applied System Innovation 6, no. 1: 2. https://doi.org/10.3390/asi6010002
APA StyleTrinh, M. H., Pham, Q. D., & Giap, V. N. (2023). Optimal Lyapunov-Based Sliding Mode Control for Slotless-Self Bearing Motor System. Applied System Innovation, 6(1), 2. https://doi.org/10.3390/asi6010002