
Earthquake-Resilient Design of Seismically Isolated Buildings: A Review of Technology

Abstract
:1. Resilience and Robustness of Seismically Isolated Buildings
2. Fundamental Principles in the Design and Analysis of Seismic Isolation Systems
- (a)
- As a result of reduction of elastic base shear force determined based on the site conditions and seismicity requires less effort with a simpler configuration and limited ductility in the superstructure;
- (b)
- Ground motion records that may yield extensive damage for an isolated structure can be determined through a comprehensive seismic hazard assessment in the preliminary design phase;
- (c)
- Sensitivity of SI structures to uncertainties associated with earthquake hazard result in less than the conventional structures;
- (d)
- The amount of damage sustained in the superstructure is kept in minor levels even under the rare earthquake ground motion levels with feasible design solutions;
- (e)
- The performance of isolation devices is known better than the structural members of its fixed-base counterparts due to provided quality assurance tests and validated mechanical characteristics in prototype tests;
- (f)
- Nonlinearity of seismically isolated structures is concentrated in the isolation interface even beyond the considered level of earthquake ground motions due to conservative safety margins and modification factors considered in the bounding analysis;
- (g)
- Continued functionality can be easily provided by upgrading the existing systems based on the performance expectations of stakeholders or updates in design provisions.
2.1. Elastomeric Bearings
2.1.1. Low-Damping Rubber Bearings (LDRB)
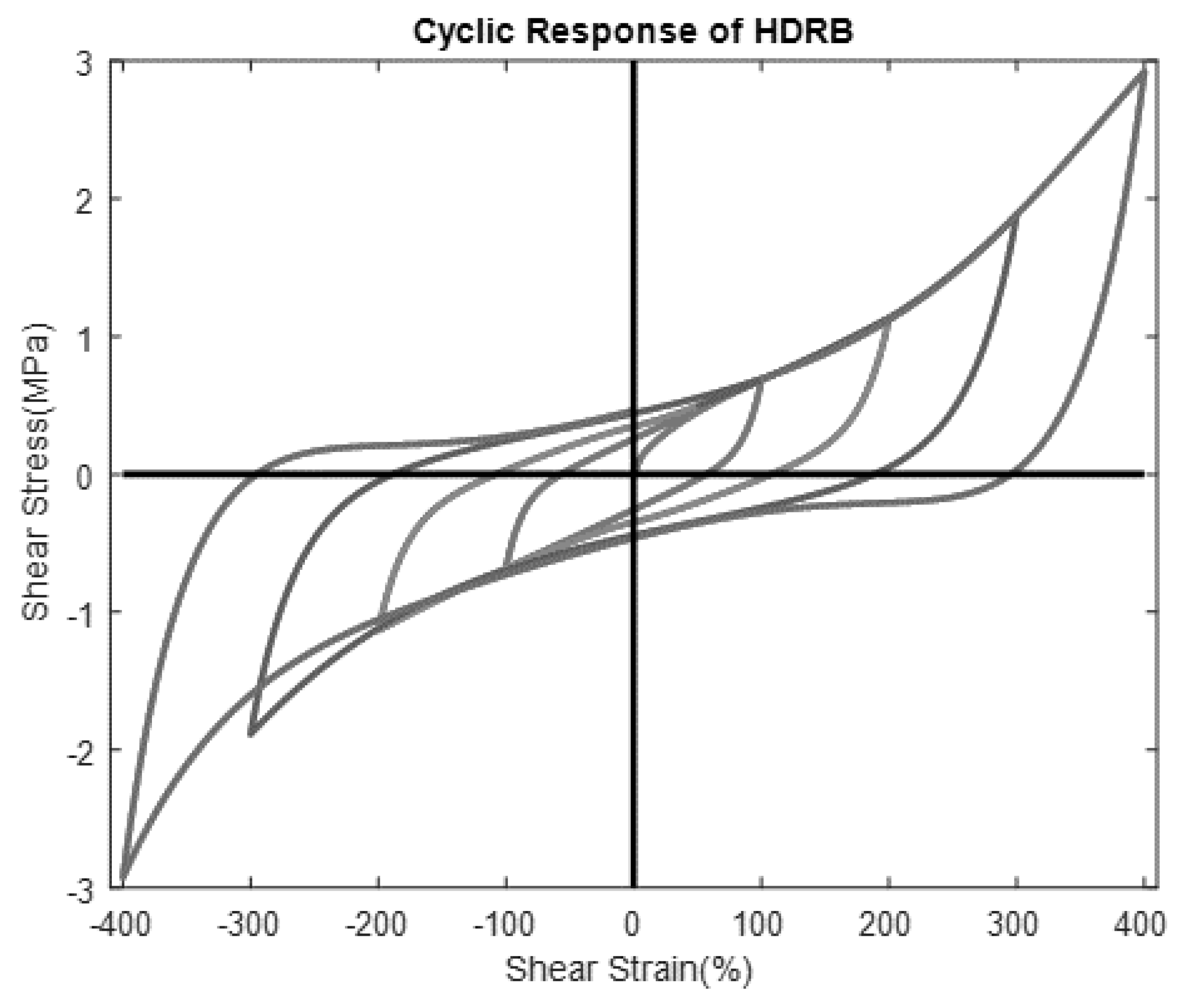
2.1.2. High-Damping-Rubber-Bearing (HDRB)
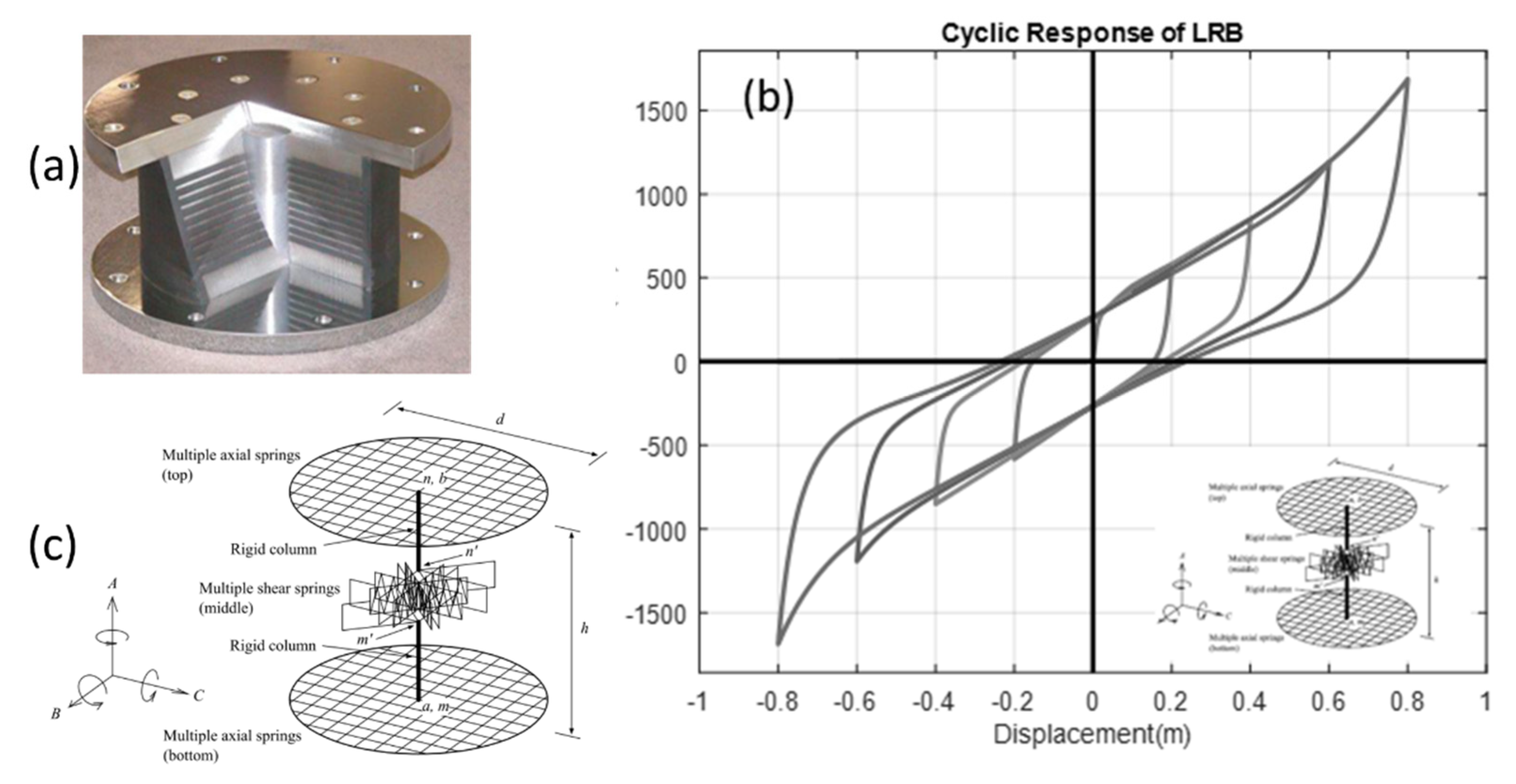
2.2. Lead Rubber Bearing (LRB)
2.3. Friction Slider Type of Isolation Systems
2.3.1. Conventional Curved Surface Friction Sliders
2.3.2. Multi-Surface Friction Sliders
3. Performance of SI Structures in Major Earthquakes
3.1. Design Issues
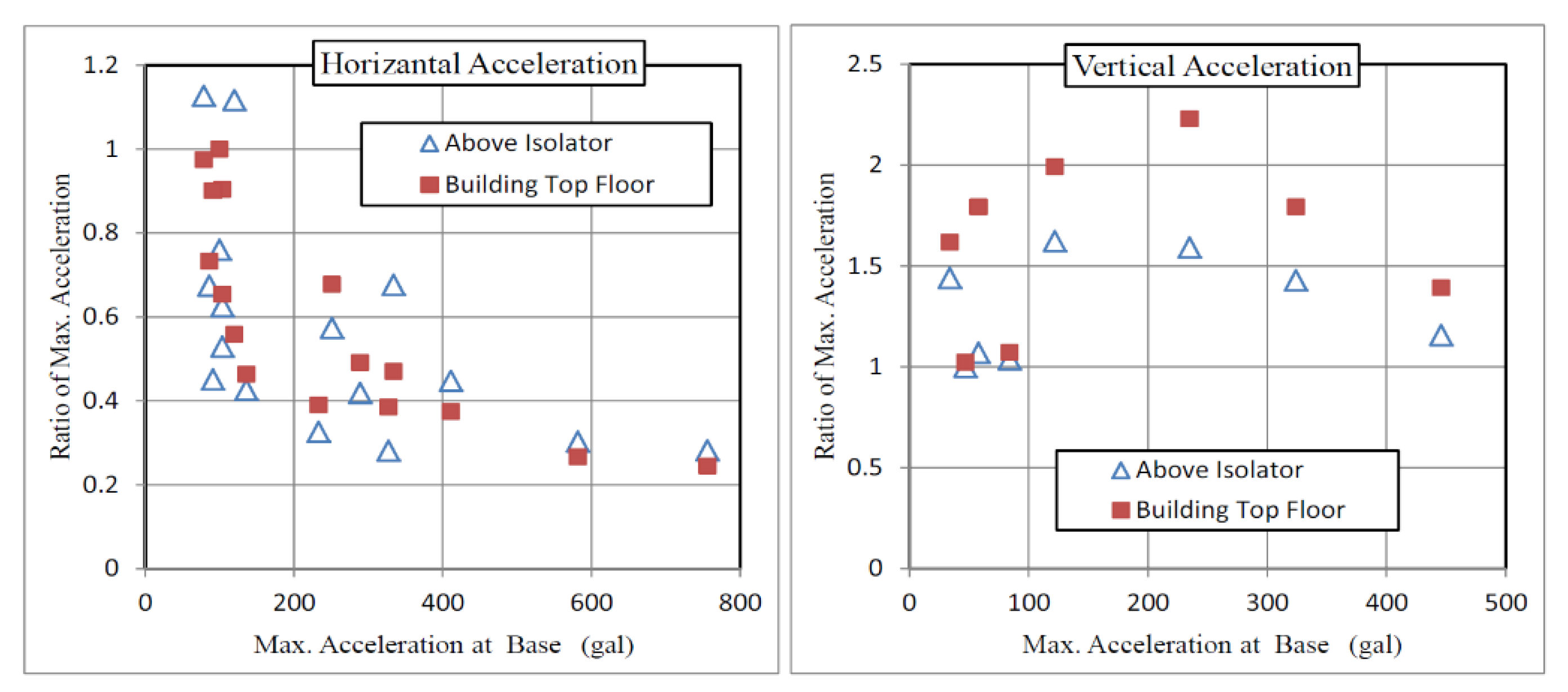
3.2. Seismic Performance of Monitored Buildings
4. Prescribed Performance Criteria for SI Structures
- (1)
- Providing linear elastic superstructure design;
- (2)
- Limiting the interstory drifts to less than 0.3%;
- (3)
- Limiting the median floor accelerations to less than 0.4 g for frequencies less than 20 Hz;
- Designers must limit damages in expansion joint and utilities at isolation level in buildings;
- Limit the exceedance of the displacement capacity of the isolation system and the energy dissipation capacity of supplemental devices;
- Provide sufficient vertical load-bearing capacity and prevent the uplift that might jeopardize the safety of the isolated building;
- The plastic deformation capacity of the superstructure must be neglected in the design, and it must be considered only as a reserve capacity due to having a limited ductility response;
- Sufficient displacement capacity should be provided for the clearance to prevent the pounding to the moat wall or adjacent structure;
- Connection details must be analyzed elaborately, and plastic failure of the foundation that may lead to loss of vertical load-bearing capacity under dynamic actions must be restricted;
- If possible, full-scale prototype tests of large elastomeric and sliding types of bearings must be performed. However, most of the time suppliers have difficulties providing direct design properties of large isolation units owing to a lack of test machines with sufficient capacity.
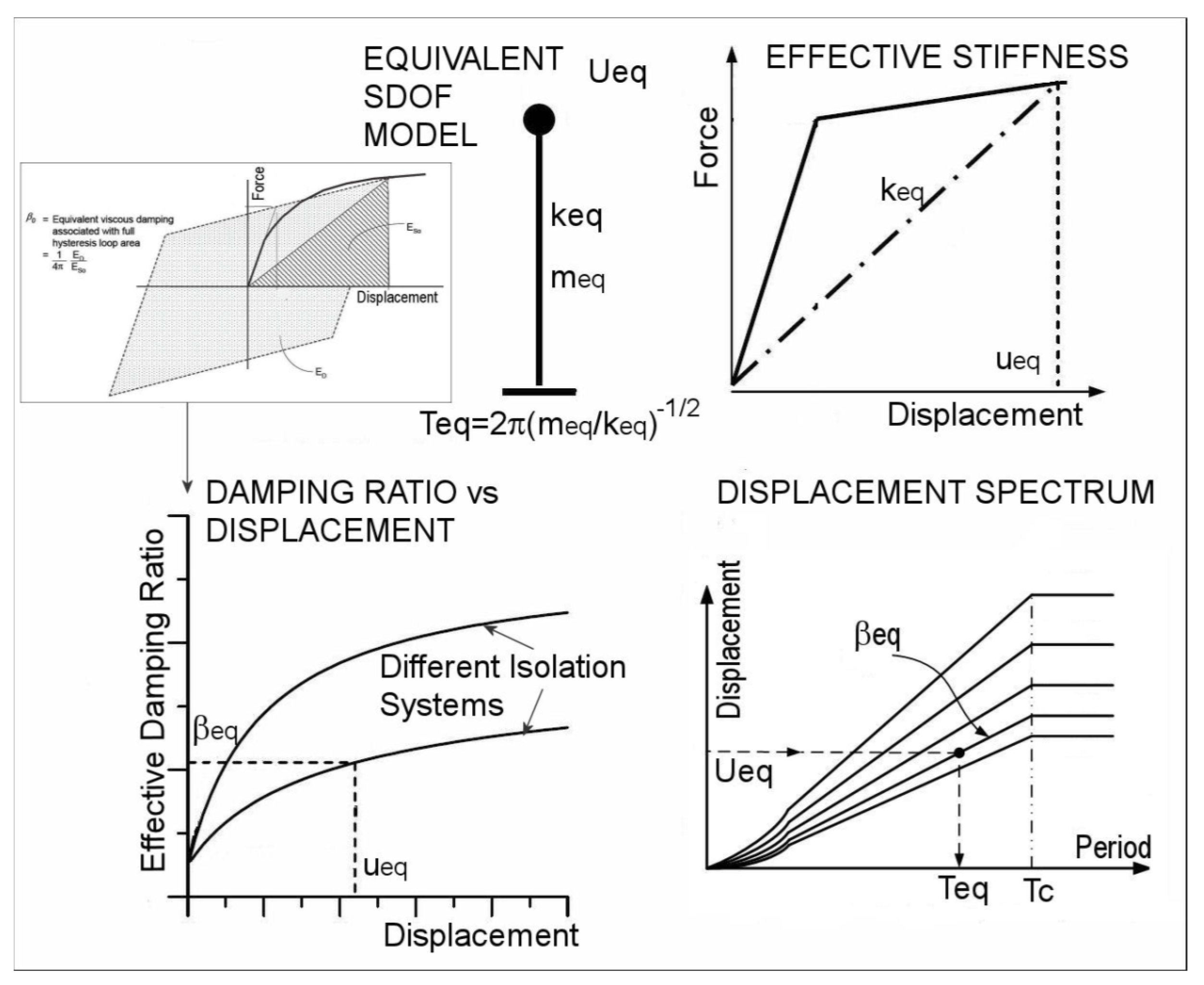
5. Direct Displacement-Based Design of SI Structures
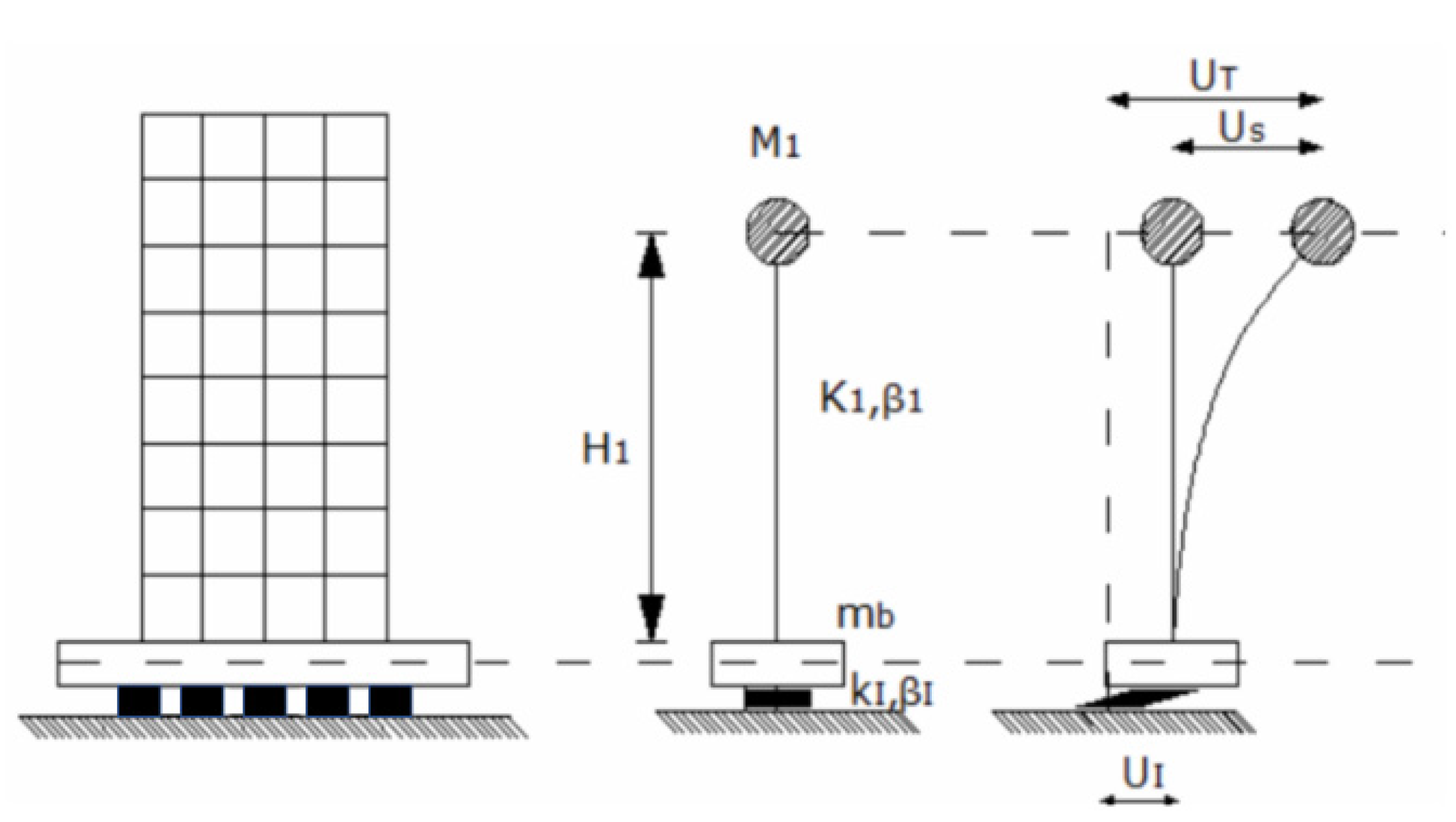
5.1. Equivalent 2DOF System for the Direct Displacement Based Design
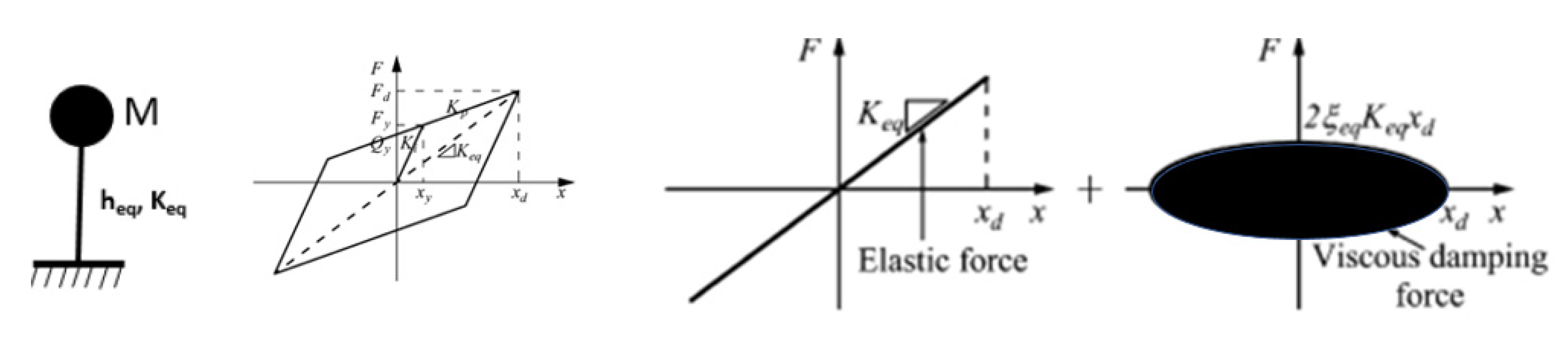
- Generation of the equivalent SDOF model;
- Determination of Keff from the hysteretic model;
- Relationship between effective damping ratio and the displacement;
- Displacement spectrum for different effective damping ratios.
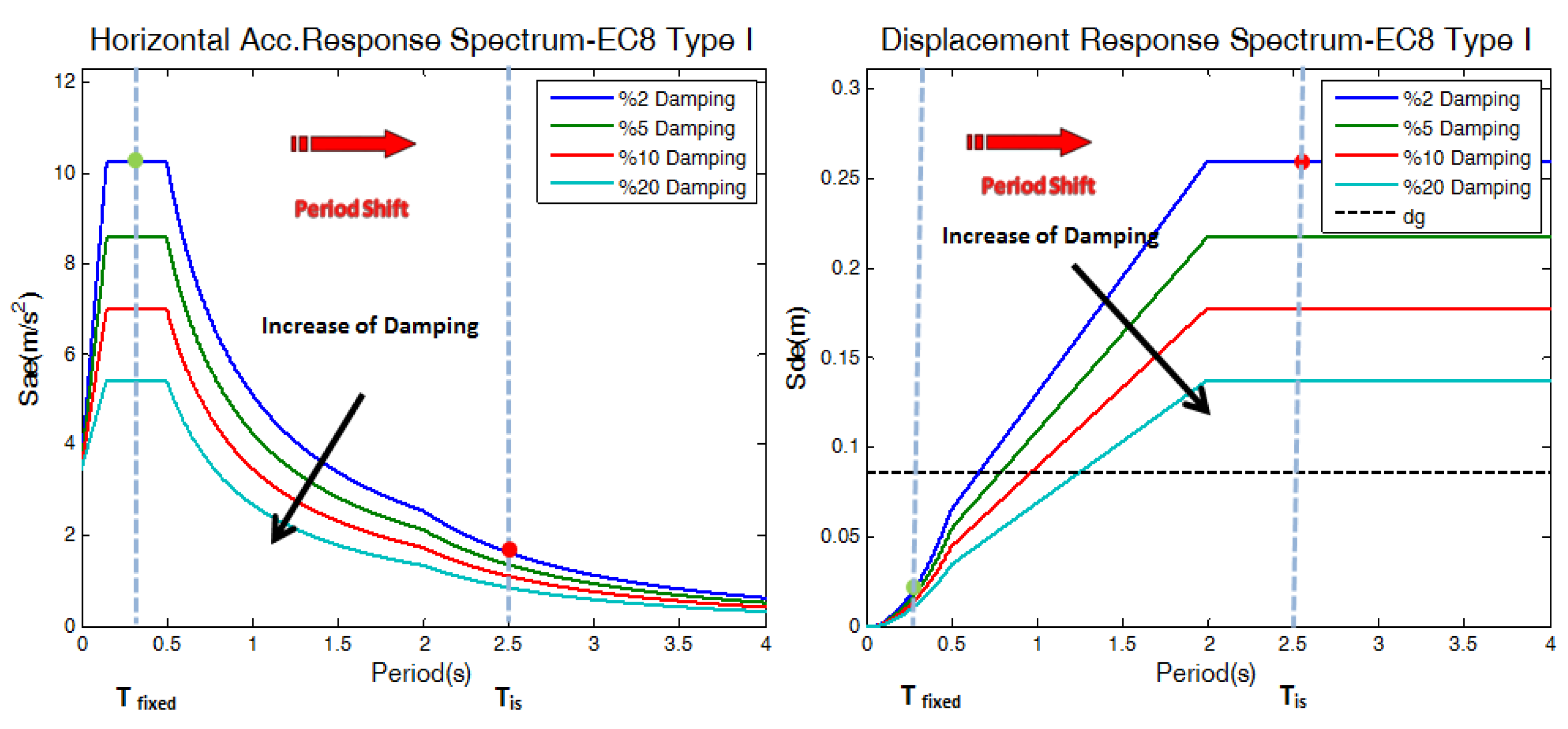
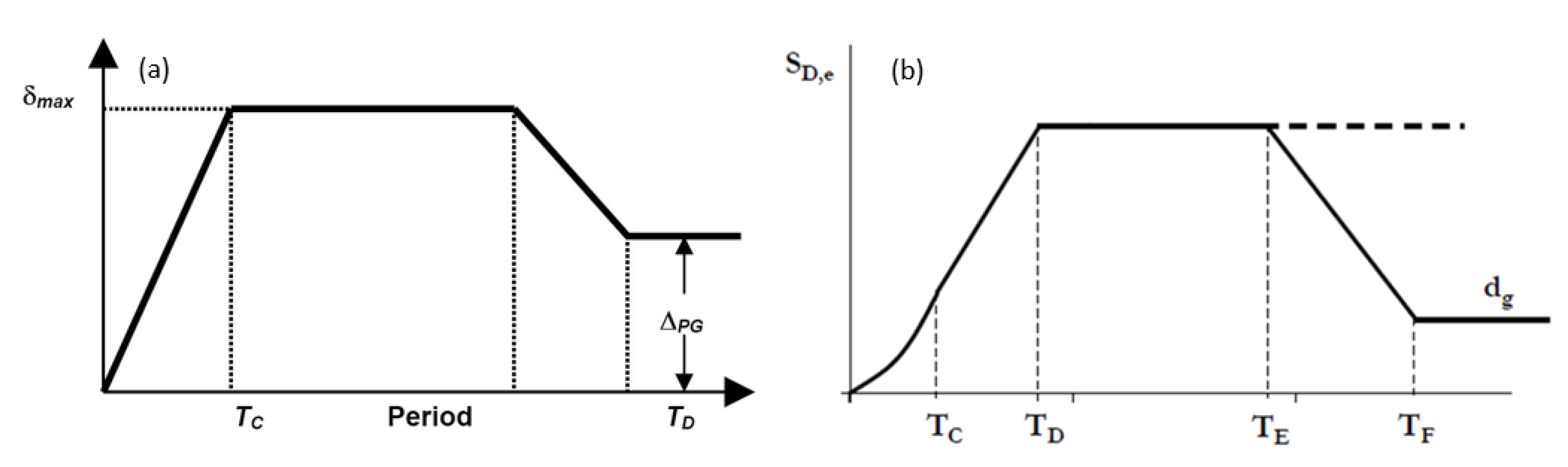
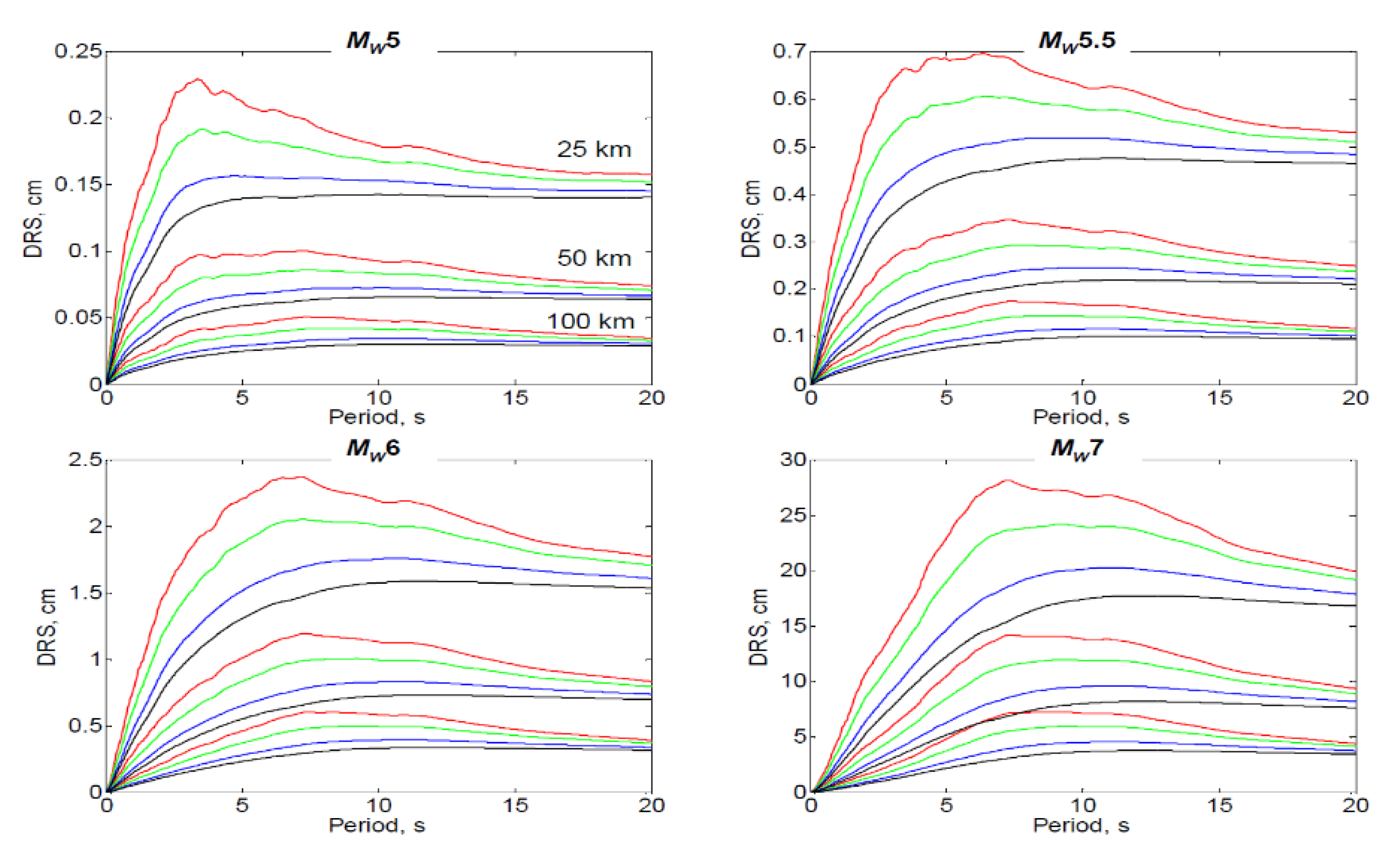
5.2. Displacement Spectrum
6. Overview of International Design Codes for SI Systems
6.1. SI Design in the US
- Extra efforts and calculations are reduced by eliminating the design basis earthquake level in the ASCE/SEI 7-10 [68] and modifying the calculation procedure based on the MCER event for the bounding analysis;
- Improved definitions of design properties for making provisions understandable easily;
- Allow using the previous prototype test data of isolation units in the design process under certain conditions;
- Adopting a new method for the vertical distribution of lateral shear forces;
- Using 5% accidental eccentricity in the nonlinear response history analysis based on the simplified approach;
- Changes in the minimum number of peer reviewers required and the responsibility of the registered design professionals.
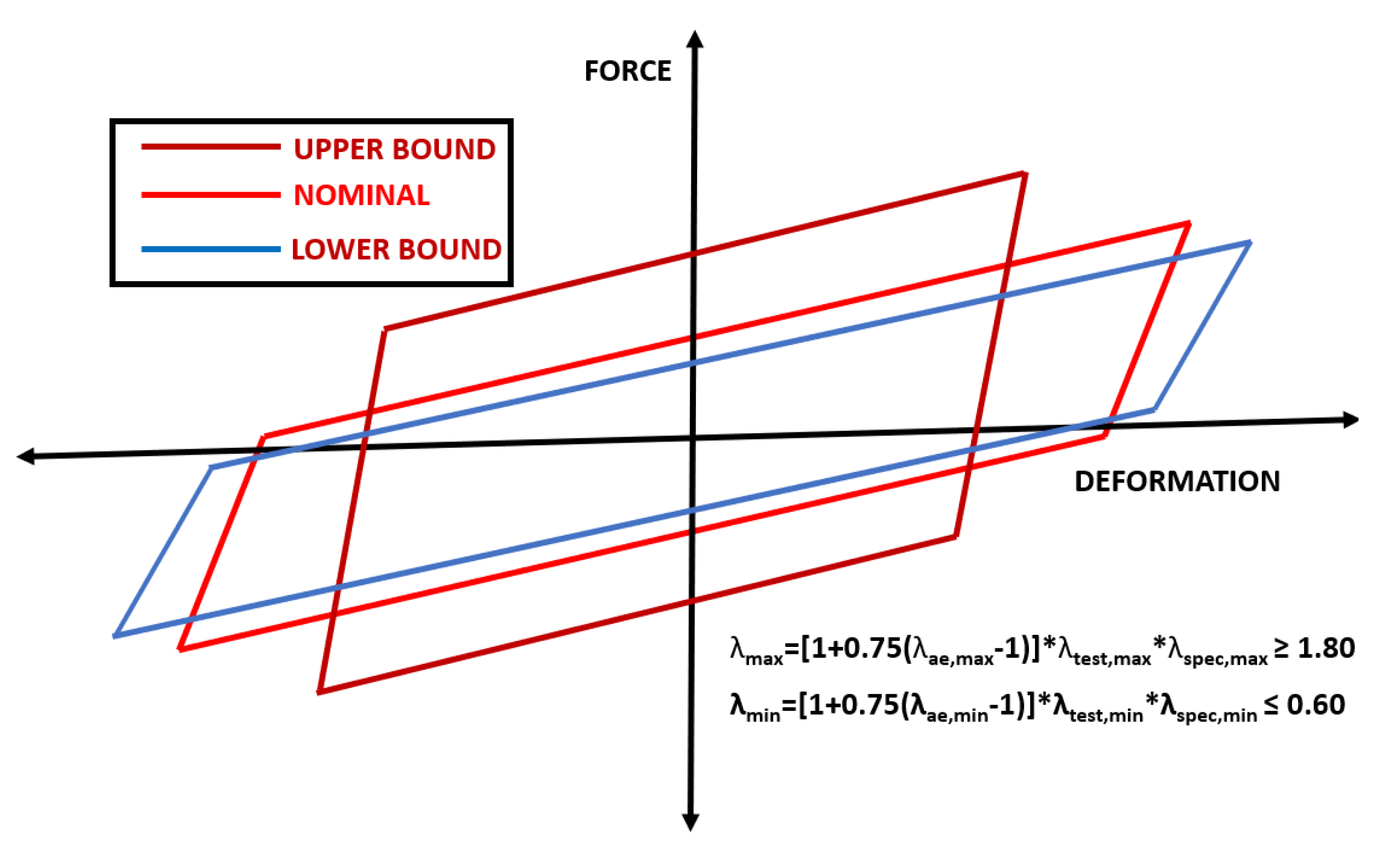
- for aging and environmental effects;
- for heating, loading rate, and scragging;
- for manufacturing variability.
6.2. SI Design in Japan
6.3. SI Design in Europe
6.4. Requirement for the Restoring Force Capability in Standards
7. Description of Earthquake Lateral Force (ELF) Procedure for SI Structures
8. Importance of Testing for Seismic Isolation Technology
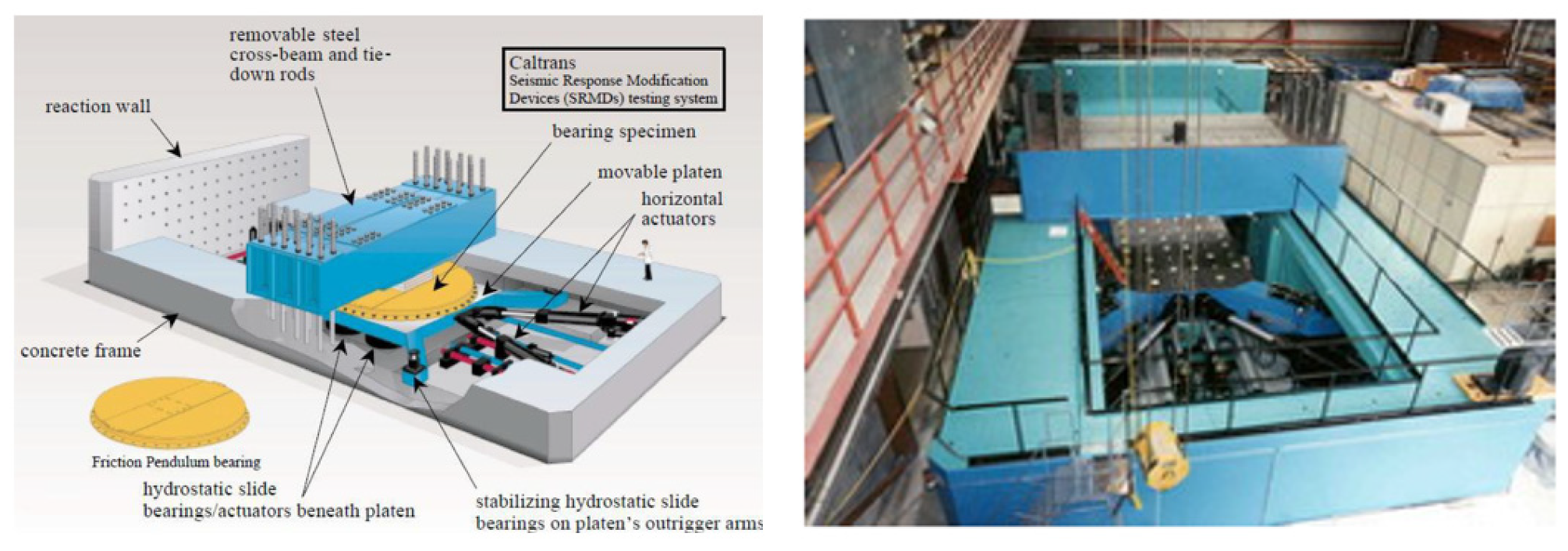
8.1. Full-Scale Mechanical Characterization Tests for Isolation Units
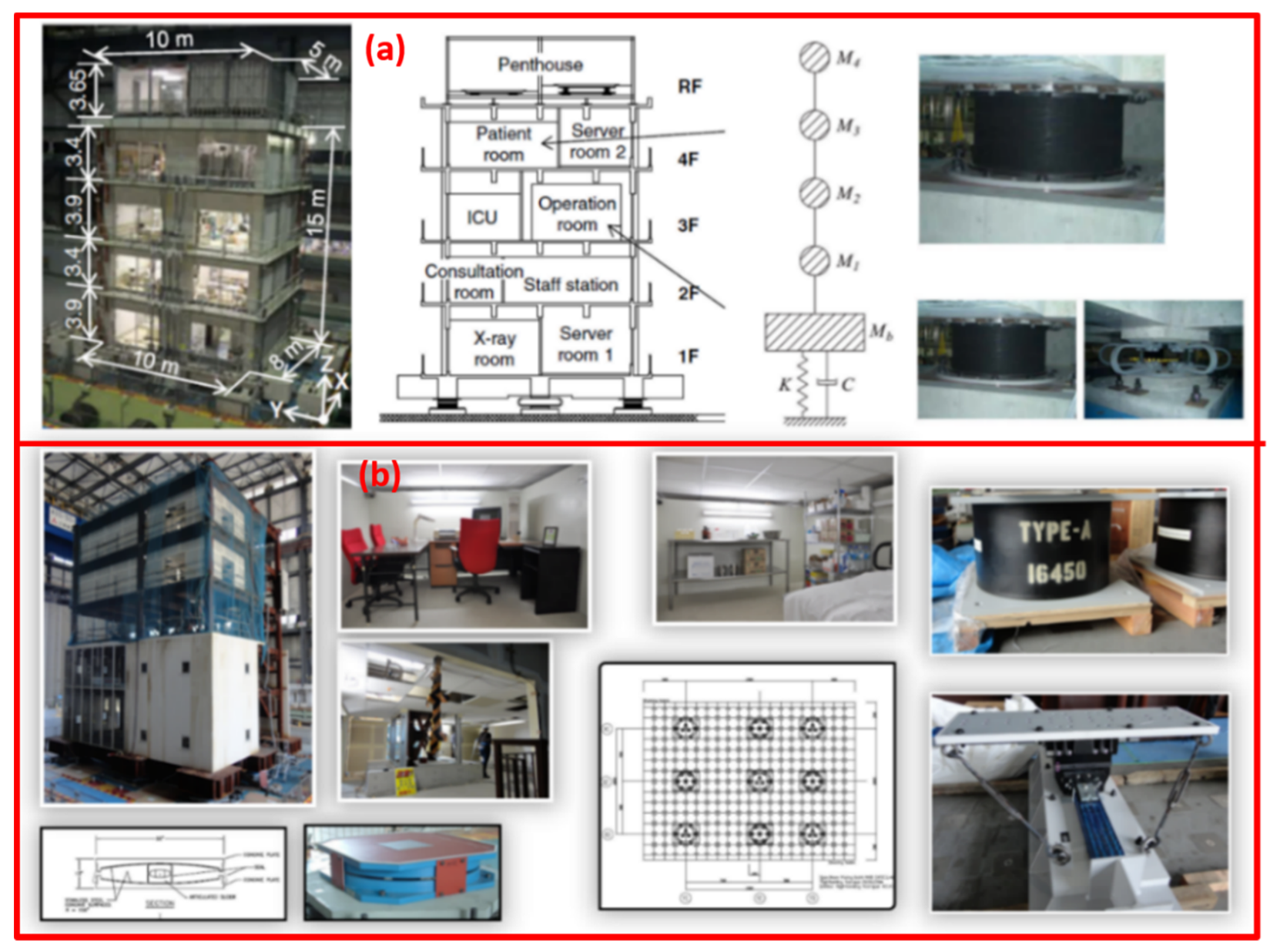
8.2. Full-Scale Shake Table Tests of Seismically Isolated Structures
- Functionality in healthcare facilities;
- Avoiding business interruption for the sustainability of earthquake-resilient communities;
- Assessing the level of structural damage and nonstructural losses in seismically isolated structures;
- Evaluation of device-specific behavior under multi-directional earthquakes;
- To determine the influence of vertical components on the response of isolation systems;
- Creating earthquake resilient society.
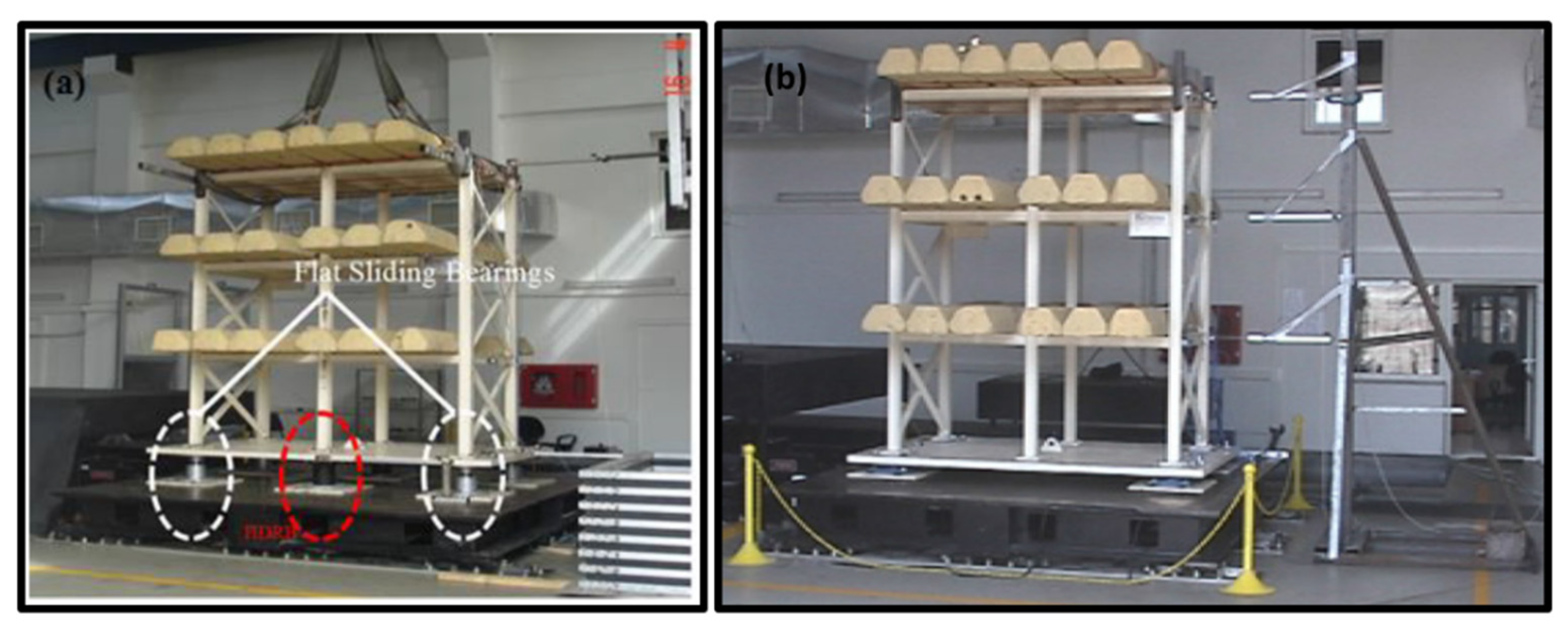
8.3. Scaled Shake Table Laboratory Tests of Seismically Isolated Structures
9. Grand Challenges in the Design and Analysis of Seismically Isolated Structures
9.1. Coupled Response, Impact of Tensile Load, and Post Cavitation in Elastomeric Bearings
- (1)
- Coupled bi-directional motion in horizontal directions;
- (2)
- Coupling of vertical and horizontal response;
- (3)
- Cavitation and post-cavitation behavior of devices subjected to tension load;
- (4)
- Strength degradation in cyclic tensile loading due to cavitation;
- (5)
- Variation in critical buckling load capacity due to lateral displacement.
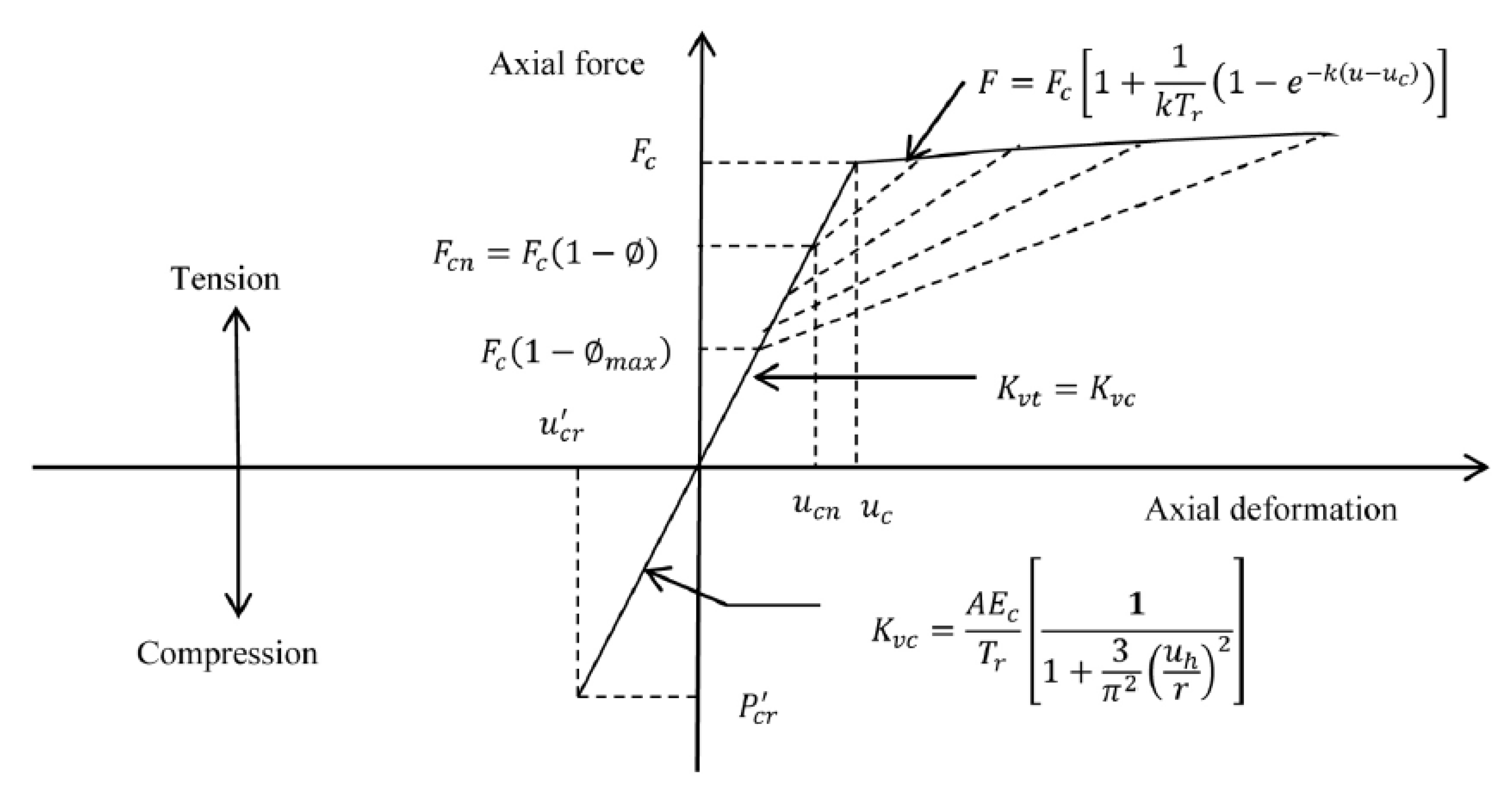
- Substantial reduction in tensile stiffness is observed after reaching the critical tensile stress;
- Force deformation relationships of elastomeric bearings are traced. A linear load-deformation relationship is observed up to the occurrence of cavitation under tension. Then, elastomeric bearings respond in the nonlinear range after reaching the critical tensile stress;
- Cavitation does not significantly affect the compression and shear characteristics of elastomeric bearings under cyclic loading. The reduction of tensile strength is dependent on the maximum tensile strain history during the cyclic loading. Variation of axial force-deformation characteristics is shown in Figure 29.

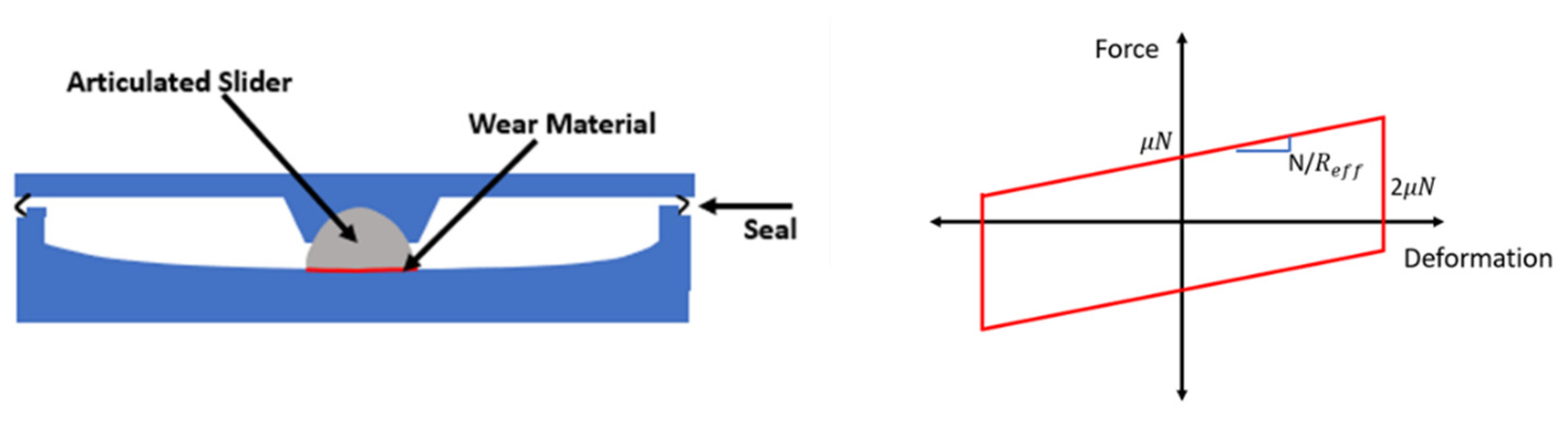
9.2. Impact of Tensile Loads in Sliding Isolation Units
9.3. Impact of Temperature Rise on Isolation Units
9.3.1. Strength Degradation in LRB Due to Heating of Lead Core
9.3.2. Strength Degradation in Curved Surface Friction Sliders
9.4. Evaluation of Ground Motion Characteristics for Seismic Isolation Systems
9.5. Residual Deformations and Re-Centering Capability Checks
- The restoring force at the design displacement di shall be greater than the restoring force at 0.5 di by not less than W/80, where W is the structure weight;
- 6 s;
- The ratio of the force increments between displacements dm/2 and dm divided by the weight of the superstructure should not exceed 0.015 drm/dm;
- drm should be less than dm–0.5 da, max, where da, max is the design displacement of the isolation.
10. Case Studies
11. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yenidogan, C.; Yokoyama, R.; Nagae, T.; Tahara, K.; Tosauchi, Y.; Kajiwara, K.; Ghannoum, W. Shake table test of a full-scale four-story reinforced concrete structure and numerical representation of overall response with modified IMK model. Bull. Earthq. Eng. 2018, 16. [Google Scholar] [CrossRef]
- Soong, T.; Chen, G.; Wu, Z.; Zhang, R.; Grigoriu, M. Assessment of the 1991 NEHRP Provisions for Nonstructural Components and Recommended Revisions; Report NCEER-93-0003; State Univ. of New York: Buffalo, NY, USA, 1993. [Google Scholar]
- Phipps, M.T. The Impact of nonstructural damage on building performance: Reflections on the 1994 Northridge earthquake. Report UCB/EERC- 97/05. In Proceedings of the EERC-CUREE Symposium in Honor of Vitelmo V. Bertero; Earthquake Engineering Research Center, Univ. of California: Berkeley, CA, USA, 1997; pp. 173–178. [Google Scholar]
- Reitherman, R.; Sabol, T.A. Northridge Earthquake of January 17, 1994: Reconnaissance report nonstructural damage. Earthq. Spectra 1995, 11, 453–514. [Google Scholar]
- Taghavi, S.; Miranda, E. Response Assessment of Nonstructural Building Elements; PEER Report# 2003/05; University of California: Berkeley, CA, USA, 2003. [Google Scholar]
- Kircher, C.A. It Makes dollars and sense to improve nonstructural system performance. In Proceedings of the ATC 29-2 Seminar on Seismic Design, Performance, and Retrofit of Nonstructural Components in Critical Facilities, Newport Beach, CA, USA, 23–24 October 2003. [Google Scholar]
- Touaillon, J. Improvement in Buildings. U.S. Patent 99973, 15 February 1870. [Google Scholar]
- Naeim, F.; Kelly, J.M. Design of Seismic Isolated Structures; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Yenidogan, C. Effects of Near-Fault Earthquakes on Seismically Isolated Structures. Ph.D. Thesis, Bogazici University Kandilli Observatory and Earthquake Research Institute, Istanbul, Turkey, 2014. [Google Scholar]
- Yenidogan, C. Experimental performance evaluation of a hybrid isolation systems. Dokuz Eylul Univ. Fac. Eng. J. Sci. Eng. 2021, 23. in press (In Turkish) [Google Scholar]
- Wu, Y.; Liu, N.; Qi, A. Seismic performance of a new structural design solution for first-story isolated RC buildings with coupled beam-column connections. Appl. Sci. 2019, 9, 177. [Google Scholar] [CrossRef] [Green Version]
- Mayes, R.L.; Jones, L.R.; Buckle, I.G. Impediments to the implementation of seismic isolation. Earthq. Spectra 1990, 6, 283–296. [Google Scholar] [CrossRef]
- Gjorgjiev, I.; Garevski, M. Replacement of the old rubber bearings of the first base isolated building in the world. In Proceedings of the 15th World Conference on Earthquake Engineering (15WCEE), Lisbon, Portugal, 24–28 September 2012. [Google Scholar]
- EN 15129. Anti-Seismic Devices; European Committee for Standardization (CEN): Brussels, Belgium, 2009. [Google Scholar]
- Grant, D.N.; Fenves, G.L.; Auricchio, F. Bridge isolation with high-damping rubber bearings—Analytical modelling and system response. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Kikuchi, M.; Aiken, I.D. An Analytical Hysteresis Model for elastomeric seismic isolation bearings. Earthq. Eng. Struct. Dyn. 1997, 26, 215–231. [Google Scholar] [CrossRef]
- Clark, P.W.; Aiken, I.D.; Kelly James, M. Experimental Studies of the Ultimate Behavior of Seismically Isolated Structures; Technical Report UCB/EERC-97/18; Earthquake Engineering Research Center: Berkeley, CA, USA, 1997. [Google Scholar]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42. [Google Scholar] [CrossRef]
- American Association of State Highway and Transportation Officials. Guide Specifications for Seismic Isolation Design; American Association of State Highway and Transportation Officials: Washington, DC, USA, 1999; Available online: https://www.worldcat.org/title/guide-specifications-for-seismic-isolation-design/oclc/775996811?referer=di&ht=edition (accessed on 2 July 2021).
- Robinson, W.H. Lead-rubber hysteretic bearings duitable for protecting structures during earthquakes. Earthq. Eng. Struct. Dyn. 1982, 10. [Google Scholar] [CrossRef]
- Skinner, R.I.; Robinson, W.H.; McVerry, G.H. An Introduction to Seismic Isolation; John Wiley & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Constantinou, M.C.; Whittaker, A.S.; Kalpakidis, Y.; Fenz, D.M.; Warn, G.P. Performance of Seismic Isolation Hardware under Service and Seismic Loading; MCEER-07-0012; State University of New York at Buffalo (NY): Buffalo, NY, USA, 2007. [Google Scholar]
- Wen, Y.K. Method for random vibration of hysteretic systems. ASCE J. Eng. Mech. Div. 1976, 102, 249–263. [Google Scholar] [CrossRef]
- Computer and Structures Inc. CSI Analysis Reference Manual for SAP2000; Computer and Structures Inc.: Berkley, CA, USA, 2010. [Google Scholar]
- Tsopelas, P.C.; Roussis, P.C.; Constantinou, M.C.; Buchanan, R.; Reinhorn, A.M. 3D-Basis-ME-MB: Computer Program for Nonlinear Dynamic Analysis of Seismically Isolated Structures; State University of New York: Albany, NY, USA, 2005. [Google Scholar]
- Park, Y.J.; Wen, Y.K.; Ang, A.H. Random vibration of hysteretic systems under bi-directional ground motions. Earthq. Eng. Struct. Dyn. 1986, 14, 543–557. [Google Scholar] [CrossRef]
- Quaglini, V.; Dubini, P.; Poggi, C. Experimental assessment of sliding materials for seismic isolation systems. Bull. Earthq. Eng. 2012, 10. [Google Scholar] [CrossRef]
- Mokha, A.; Constantinou, M.C.; Reinhorn, A.M. Teflon Bearings in Aseismic Base Isolation: Experimental Studies and Mathematical Modeling; No. NCEER-88/0038 TECHNICAL; National Center for Earthquake Engineering Research: State Univ. of New York: Buffalo, NY, USA, 1988. [Google Scholar]
- Lomiento, G.; Bonessio, N.; Benzoni, G. Friction model for sliding bearings under seismic excitation. J. Earthq. Eng. 2013, 17, 1162–1191. [Google Scholar] [CrossRef]
- Kumar, M.; Whittaker, A.S.; Constantinou, M.C. Characterizing friction in sliding isolation bearings. Earthq. Eng. Struct. Dyn. 2015, 44. [Google Scholar] [CrossRef]
- Tsopelas, P.; Constantinou, M.C.M.; Reinhorn, A.A.M. 3D-BASIS-ME: Computer Program for Nonlinear Dynamic Analysis of Seismically Isolated Single and Multiple Structures and Liquid Storage Tanks; NCEER-94-0010, National Center for Earthquake engineering Research; State Univ. of New York: Buffalo, NY, USA, 1994; Available online: https://www.eng.buffalo.edu/mceer-reports/94/94-0010.pdf (accessed on 12 April 1994).
- Zayas, V.A.; Low, S.S.; Mahin, S.A. A simple pendulum technique for achieving seismic isolation. Earthq. Spectra 1990, 6. [Google Scholar] [CrossRef]
- Barucci, C. La Casa Antisismica; Prototipi e Brevetti, Gangemi Editore: Rome, Italy, 1990; pp. 13–28. (In Italian) [Google Scholar]
- Penkuhn, A.L.K. Three-Point Foundation for Building Structures. U.S. Patent No. 3347002, 17 October 1967. [Google Scholar]
- IBC-2006. International Building Code 2006; International Code Council (ICC): Falls Church, VA, USA, 2006. [Google Scholar]
- American Association of State Highway and Transportation Officials. Guide Specifications for Seismic Isolation Design; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2010; Available online: https://www.worldcat.org/title/guide-specifications-for-seismic-isolation-design/oclc/894315590?referer=di&ht=edition (accessed on 2 July 2021).
- Anderson, E.L.; Mahin, S.A. An evaluation of bi-directional earthquake shaking on the provisions of the AASHTO guide specifications for seismic isolation design. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Warn, G.P.; Whittaker, A.S. Performance estimates in seismically isolated bridge structures. Eng. Struct. 2004, 26. [Google Scholar] [CrossRef]
- Mosqueda, G.; Whittaker, A.S.; Fenves, G.L. Characterization and modeling of friction pendulum bearings subjected to multiple components of excitation. J. Struct. Eng. 2004, 130. [Google Scholar] [CrossRef]
- Tsai, C.S. Finite Element formulations for friction pendulum seismic isolation bearings. Int. J. Numer. Methods Eng. 1997, 40. [Google Scholar] [CrossRef]
- Tsai, C.S.; Lu, P.C.; Chen, W.S.; Chiang, T.C.; Yang, C.T.; Lin, Y.C. Finite element formulation and shaking table tests of direction-optimized-friction-pendulum system. Eng. Struct. 2008, 30. [Google Scholar] [CrossRef]
- Paolacci, F.; Pegon, P.; Molina, F.J.; Poljansek, M.; Giannini, R.; Di Sarno, L.; Abbiati, G.; Mohamad, A.; Bursi, O.; Taucer, F.; et al. Assessment of the Seismic Vulnerability of an Old RC Viaduct with Frame Piers and Study of the Effectiveness of Base Isolation through psd Testing (RETRO); JRC Scientific and Technical Reports, EUR 26471; Publications Office of the European Union: Ispra, Italy, 2014. [Google Scholar]
- Fenz, D.M.; Constantinou, M.C. Behaviour of the Double Concave Friction Pendulum Bearing. Earthq. Eng. Struct. Dyn. 2006, 35, 1403–1424. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Spherical Sliding Isolation Bearings with Adaptive Behavior: Experimental Verification. Earthq. Eng. Struct. Dyn. Earthq. 2008, 37, 185–205. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Modeling triple friction pendulum bearings for response-history analysis. Earthq. Spectra 2008, 24, 1011–1028. [Google Scholar] [CrossRef]
- Tsai, C.S.; Chiang, T.C.; Chen, B.J. Shaking table tests of a full-scale steel structure isolated with mfps. In Proceedings of the American Society of Mechanical Engineers, Pressure Vessels and Piping Division (Publication) PVP, Cleveland, OH, USA, 20–24 July 2003; Volume 466. [Google Scholar]
- Tsai, C.S.; Chen, B.J.; Pong, W.S.; Chiang, T.C. Interactive behavior of structures with multiple friction pendulum isolation system and unbounded foundations. Adv. Struct. Eng. 2004, 7, 539–551. [Google Scholar] [CrossRef]
- Tsai, C.S.; Chen, W.S.; Chiang, T.C.; Chen, B.J. Component and shaking table tests for full-scale multiple friction pendulum system. Earthq. Eng. Struct. Dyn. 2006, 35, 1653–1675. [Google Scholar] [CrossRef]
- Tsai, C.S.; Chen, M.J.; Cheng, C.K.; Yu, S.H. Experimental study of MFPS-isolated sensitive equipment. In Proceedings of the American Society of Mechanical Engineers, Pressure Vessels and Piping Division (Publication) PVP, Denver, CO, USA, 17–21 July 2005; Volume 8. [Google Scholar]
- Morgan, T.A.; Mahin, S.A. Achieving reliable seismic performance enhancement using multi-stage friction pendulum isolators. Earthq. Eng. Struct. Dyn. 2010, 39, 1443–1461. [Google Scholar] [CrossRef]
- Sarlis, A.A.; Constantinou, M.C. Modeling Triple Friction Pendulum Isolators in SAP2000; University at Buffalo: Buffalo, NY, USA, 2010. [Google Scholar]
- Becker, T.C.; Mahin, S.A. Experimental and analytical study of the bi-directional behavior of the triple friction pendulum isolator. Earthq. Eng. Struct. Dyn. 2012, 41, 355–373. [Google Scholar] [CrossRef]
- Tsai, C.S.; Lin, Y.C.; Su, H.C. Characterization and modeling of multiple friction pendulum isolation system with numerous sliding interfaces. Earthq. Eng. Struct. Dyn. 2010, 39, 1463–1491. [Google Scholar] [CrossRef]
- Tsai, C.S.; Su, H.C.; Chiang, T.C. Equivalent series system to model a multiple friction pendulum system with numerous sliding interfaces for seismic analyses. Earthq. Eng. Eng. Vib. 2014, 13, 85–99. [Google Scholar] [CrossRef]
- Lee, D.; Constantinou, M.C. Quintuple friction pendulum isolator: Behavior, modeling, and validation. Earthq. Spectra 2016, 32, 1607–1626. [Google Scholar] [CrossRef]
- Sato, M.; Nishi, H.; Kawashima, K.; Unjoh, S. Response of On-Netoh Bridge during Kushiro-Oki Earthquake of January 1993. In Proceedings of the 3rd U.S. Japan Workshop on Earthquake Protective Systems for Bridges; Report NCEER-94-0009; National Center for Earthquake Engineering Research: Buffalo, NY, USA, 1994. [Google Scholar]
- Clark, P.W.; Higashino, M.; Kelly, J.M. Performance of seismically isolated structures in the January 17, 1994 Northridge earthquake. In Proceedings of the Sixth, U.S.-Japan Workshop on the Improvement of Building Structural Design and Construction Practices in the United States and Japan: Applied Technology Council and Japan Structural Consultants Association, ATC-15-5; Pacific Earthquake Engineering Center: Victoria, BC, Canada, 1996. [Google Scholar]
- Kuang, A.; Sridhar, A.; Garven, J.; Gutschmidt, S.; Rodgers, G.W.; Chase, J.G.; Gavin, H.P.; Nigbor, R.L.; MacRae, G.A. Christchurch Women’s Hospital: Performance analysis of the base-isolation system during the series of Canterbury Earthquakes 2011–2012. J. Perform. Constr. Facil. 2016, 30, 04015096. [Google Scholar] [CrossRef] [Green Version]
- Kani, N.; Takayama, M.; Wada, A. Performance of seismically isolated buildings in Japan. In Proceedings of the 8th US National Conference on Earthquake Engineering, San Francisco, CA, USA, 18–22 April 2006; Volume 16. [Google Scholar]
- Kasai, K.; Mita, A.; Kitamura, H.; Matsuda, K.; Morgan, T.A.; Taylor, A.W. Performance of seismic protection technologies during the 2011 Tohoku-Oki earthquake. Earthq. Spectra 2013, 29, 265–293. [Google Scholar] [CrossRef]
- Morita, K.; Takayama, M. Performance of seismic isolated buildings due to 2005 west off Fukuoka earthquake in Japan. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Çelebi, M. Successful performance of a base-isolated hospital building during the 17 January 1994 Northridge earthquake. Struct. Des. Tall Build. 1996, 5. [Google Scholar] [CrossRef]
- Kashima, T. Dynamic behaviour of a seven-storey seismically isolated building during the 2011 Tohoku Earthquake. In Proceedings of the EACS 2016—6th European Conference on Structural Control, Sheffield, UK, 11–13 July 2016. [Google Scholar]
- Okawa, I.; Kashima, T.; Koyama, S.; Iiba, M. Recorded responses of building structures during the 2011 Tohoku-Oki earthquake with some implications for design practice. Earthq. Spectra 2013, 29, 245–264. [Google Scholar] [CrossRef]
- Iiba, M.; Kashima, T.; Morita, K. Behavior of seismically isolated buildings based on observed motion records during the 2011 Great East Japan earthquake. In Proceedings of the 13th World Conference on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures—Commemorating JSSI 20th Anniversary, Sendai, Japan, 24–27 September 2013. [Google Scholar]
- CEN. Eurocode 8, Design of Structures for Earthquake Resistance Part 1: General Rules, Seismic Actions and Rules for Buildings; EN 1998-1:2005; Comitee Europeen de Normalisation: Brussels, Belgium, 2005. [Google Scholar]
- CEN. Eurocode (EC) 8: Design of Structures for Earthquake Resistance-Part 2 Seismic Design of Bridges; Comité Européen de Normalisation: Brussels, Belgium, 2005. [Google Scholar]
- ASCE/SEI (ASCE/Structural Engineering Institute). Minimum Design Loads for Buildings and Other Structures, ASCE/SEI 7-10; ASCE/Structural Engineering Institute: Reston, VA, USA, 2013. [Google Scholar]
- BSLEO. [2000/2016] Building Standard Law; Building Center of Japan: Chiyoda-ku, Tokyo, Japan, 2016. [Google Scholar]
- ASCE/SEI (ASCE/Structural Engineering Institute). Minimum Design Loads for Buildings and Other Structures, ASCE/SEI 7-16; ASCE/Structural Engineering Institute: Reston, VA, USA, 2017. [Google Scholar]
- Zayas, V. Seismic Isolation Design Criteria for Continued Functionality. In Proceedings of the SEAOC 2013 Convention Proceedings; Structural Engineers Association of California: San Diego, CA, USA, 2013. [Google Scholar]
- Bertero, R.D.; Bertero, V.V. Performance-Based Seismic Engineering: The Need for a Reliable Conceptual Comprehensive Approach. Wiley Online Libr. 2002, 31, 627–652. [Google Scholar] [CrossRef]
- Shibata, A.; Sozen, M. Substitute Structure Method for Seismic Design in Reinforced Concrete. J. Struct. Div. 1976, 102, 1–18. [Google Scholar] [CrossRef]
- Priestley, M.J.N.; Calvi, G.M.; Kowalsky, M.J. Displacement-Based Seismic Design of Structures; IUSS Press: Pavia, Italy, 2007. [Google Scholar]
- Bommer, J.J.; Elnashai, A.S. Displacement spectra for seismic design. J. Earthq. Eng. 1999, 3. [Google Scholar] [CrossRef]
- Tolis, S.V.; Faccioli, E. Displacement design spectra. J. Earthq. Eng. 1999, 3, 107–125. [Google Scholar] [CrossRef]
- NEHRP. FEMA 450 NEHRP Recommended Provisions for Seismic Regulation for New Buildings and Other Structures; Federal Emergency Management Agency: Washington, DC, USA, 2003.
- Cauzzi, C.; Faccioli, E. Broadband (0.05 to 20 s) Prediction of displacement response spectra based on worldwide digital records. J. Seismol. 2008, 12, 453–475. [Google Scholar] [CrossRef]
- Kelly, J.M. Implementation of base isolation in the United States. In Proceedings of the 10th World Conference on Earthquake Engineering, Madrid, Spain, 19–24 July 1992. [Google Scholar]
- FEMA 222A. The NEHRP Recommended Provisions for Seismic Regulation for New Buildings, Including the NEHRP Probabilistic Ground Motion Maps; Federal Emergency Management Agency: Washington, DC, USA, 1994.
- International Conference of Building Officials. Uniform Building Code (UBC); International Conference of Building Officials: Whittier, CA, USA, 1991; Volume 2. [Google Scholar]
- ASCE/SEI. Seismic Rehabilitation of Existing Buildings, (ASCE/SEI 41-17); American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017. [Google Scholar]
- York, K.; Ryan, K.L. Distribution of lateral forces in base-isolated buildings considering isolation system nonlinearity. J. Earthq. Eng. 2008, 12, 1185–1204. [Google Scholar] [CrossRef]
- Pan, P.; Zamfirescu, D.; Nakashima, M.; Nakayasu, N.; Kashiwa, H. Base-isolation design practice in Japan: Introduction to the Post-Kobe Approach. J. Earthq. Eng. 2005, 9, 147–171. [Google Scholar] [CrossRef]
- Yenidogan, C.; Erdik, M. A Comparative Evaluation of design provisions for seismically isolated buildings. Soil Dyn. Earthq. Eng. 2016, 90, 265–286. [Google Scholar] [CrossRef]
- EN 10204. Metallic Products-Types of Inspection Documents. Council Directive 89/106/EEC (1988) on the Approximation of Laws, Regulations and Administrative Provisions of the Member States Relating to Construction Products (89/106/EEC); Comité Européen de Normalisation (CEN): Brussels, Belgium, 2004. [Google Scholar]
- Nuove Norme Tecniche per Le Costruzioni. Chapter 7.10: Costruzioni E Ponti Con Isolamento E/O Dissipazione; No. 29 Del 4 Febbraio 2008-S.O. n. 30; Gazzetta Ufficiale Della Repubblica Italiana: Roma, Italy, 2008. (In Italian) [Google Scholar]
- Directorate of Emergency Management (AFAD). Design Code for Buildings in Seismic Regions; Directorate of Emergency Management (AFAD): Ankara, Turkey, 2018.
- Jacobsen, L. Steady forced vibrations as influenced by damping. Transac. Am. Soc. Mech. Eng. 1930, 52, 169–181. [Google Scholar]
- Rosenblueth, E.; Herrera, I. On a kind of hysteretic damping. J. Eng. Mech. Div. 1964, 90, 37–48. [Google Scholar] [CrossRef]
- Okazaki, T.; Sato, K.; Sato, E.; Sasaki, T.; Kajiwara, K.; Ryan, K.; Mahin, S. NEES/E-Defense Base Isolation Tests: Performance of Triple-Pendulum Bearings. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 22–28 September 2012. [Google Scholar]
- Okazaki, T.; Sato, E.; Ryan, K.; Sasaki, T.; Mahin, S. Performance of triple-pendulum bearings observed in a full-scale shake-table test program. In Proceedings of the NCEE 2014—10th U.S. National Conference on Earthquake Engineering: Frontiers of Earthquake Engineering, Anchorage, AK, USA, 21–25 July 2014. [Google Scholar]
- Sasaki, T.; Sato, E.; Ryan, K.L.; Mahin, S.A. NEES/E-Defense Base-Isolation Tests: Effectiveness of friction pendulum and lead-rubber bearings systems. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 22–26 September 2012. [Google Scholar]
- Yenidogan, C.; Takahashi, T.; Nagae, T.; Inoue, T. Seismic Performance Evaluation of a Base Isolated P&B Structure though Full-Scale Shake Table Tests. Paper N° C004350. In Proceedings of the 17th World Conference on Earthquake Engineering, 17WCEE, Sendai, Japan, 20 September–2 October 2021. [Google Scholar]
- Takahashi, T.; Uwadan, S.; Nagae, T.; Yenidogan, C.; Yamada, S.; Kashiwa, H.; Hayashi, K.; Inoue, T. Stiffness, Ultimate Strength Capacity and Cyclic Loading Deterioration Characteristics of Two Different Wood-Structure Dwellings Following the Current Japanese Practice. Paper No. C002285. In Proceedings of the 17th World Conference on Earthquake Engineering, 17WCEE, Sendai, Japan, 20 September–2 October 2021. [Google Scholar]
- Chung, Y.-L.; Nagae, T.; Hitaka, T.; Nakashima, M. Seismic resistance capacity of high-rise buildings subjected to long-period ground motions: E-defense shaking table test. J. Struct. Eng. 2010, 136, 637–644. [Google Scholar] [CrossRef]
- Nagae, T.; Kajiwara, K.; Inoue, T.; Nakashima, M. Large scale shaking table tests for high-rise buildings: New projects of e-defense. Geotech. Geol. Earthq. Eng. 2010, 13, 461–469. [Google Scholar] [CrossRef]
- Benzoni, G.; Seible, F. Design of the Caltrans Seismic Response Modification Device (SRMD) Test. Facility. USA-ITALY Workshop on Protective Systems; Report No: MCEER-98-0015; Multidisciplinary Center for Earthquake Engineering Research: Buffalo, NY, USA, 1998. [Google Scholar]
- Lomiento, G.; Bonessio, N.; Benzoni, G. Effects of Loading Characteristics on the Performance of Sliding Isolation Devices. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 22–28 September 2012. [Google Scholar]
- Lomiento, G.; Benzoni, G.; Bonessio, N.; Okten, M.S. Effect of frictional characteristics on the response of sliding base-isolated buildings under three components of earthquake excitation. In Proceedings of the 14th World Conference on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures, San Diego, CA, USA, 9–11 September 2015. [Google Scholar]
- Sato, E.; Furukawa, S.; Kakehi, A.; Nakashima, M. Full-scale shaking table test for examination of safety and functionality of base-isolated medical facilities. Earthq. Eng. Struct. Dyn. 2011, 40, 1435–1453. [Google Scholar] [CrossRef]
- Dao, N.D.; Ryan, K.L.; Sato, E.; Sasaki, T. Predicting the displacement of Triple PendulumTM bearings in a full-scale shaking experiment using a three-dimensional element. Earthq. Eng. Struct. Dyn. 2013, 42. [Google Scholar] [CrossRef]
- Nagae, T.; Uwadan, S.; Yenidogan, C.; Yamada, S.; Hayashi, K.; Kashiwa, H.; Takahashi, T.; Inoue, T. The 2019 full-scale shake table test program of wood dwellings. Paper N° C002274. In Proceedings of the 17th World Conference on Earthquake Engineering, 17WCEE, Sendai, Japan, 13–18 September 2020. [Google Scholar]
- Yenidogan, C.; Nishi, R.; Nagae, T.; Inoue, T.; Kajiwara, K. Full-Scale cyclic test of a Japanese Post and Beam wood shearwall assembly. Bull. Earthq. Eng. 2020, 18, 4985–5008. [Google Scholar] [CrossRef]
- Yenidogan, C.; Nishi, R.; Uwadan, S.; Nagae, T.; Takahashi, T.; Inoue, T.; Kajiwara, K. Full-scale testing of a two-story P&B shearwall assembly under dynamic loading test protocol. Paper N° C003236. In Proceedings of the 17th World Conference on Earthquake Engineering, 17WCEE, Sendai, Japan, 20 September–2 October 2021. [Google Scholar]
- Yenidogan, C.; Uckan, E.; Erdik, M. Shake Table Tests of a Passive-Hybrid Isolation System. In Proceedings of the Second Conference on Smart Monitoring Assessment and Rehabilitation of Civil Structures, Istanbul, Turkey, 9–11 September 2013. [Google Scholar]
- Uckan, E.; Yenidogan, C.; Tüzün, C.; Erdik, M. Seismic Isolation Applications and Current Research Practice in Turkey. In Proceedings of the Structural Engineers World Congress, Bangalore, India, 2 November 2007. [Google Scholar]
- Oikonomou, K.; Constantinou, M.C.; Reinhorn, A.M.; Yenidogan, C. Seismic isolation of electrical equipment ‘Seismic Table Simulation’. In Proceedings of the 15th Earthquake Engineering World Conference, Lisbon, Portugal, 22–28 September 2012. [Google Scholar]
- Masroor, A.; Mosqueda, G. Experimental simulation of base-isolated buildings pounding against moat wall and effects on superstructure response. Earthq. Eng. Struct. Dyn. 2012, 41, 2093–2109. [Google Scholar] [CrossRef]
- Masroor, A.; Mosqueda, G. Impact model for simulation of base isolated buildings impacting flexible moat walls. Earthq. Eng. Struct. Dyn. 2013, 42, 357–376. [Google Scholar] [CrossRef]
- Liu, C.; Yang, W.; Yan, Z.; Lu, Z.; Luo, N. Base pounding model and response analysis of base-isolated structures under earthquake excitation. Appl. Sci. 2017, 7, 1238. [Google Scholar] [CrossRef] [Green Version]
- Federal Emergency Management Agency (FEMA). Quantification of Building Seismic Performance Factors, FEMA-P-695; Federal Emergency Management Agency: Washington, DC, USA, 2009.
- Kalpakidis, I.V.; Constantinou, M.C. Principles of scaling and similarity for testing of lead-rubber bearings. Earthq. Eng. Struct. Dyn. 2010, 39, 1551–1568. [Google Scholar] [CrossRef]
- Bao, Y.; Becker, T.C.; Hamaguchi, H. Failure of double friction pendulum bearings under pulse-type motions. Earthq. Eng. Struct. Dyn. 2017, 46, 715–732. [Google Scholar] [CrossRef]
- Becker, T.C.; Bao, Y.; Mahin, S.A. Extreme behavior in a triple friction pendulum isolated frame. Earthq. Eng. Struct. Dyn. 2017, 46, 2683–2698. [Google Scholar] [CrossRef]
- Kumar, M.; Whittaker, A.S.; Constantinou, M.C. An advanced numerical model of elastomeric seismic isolation bearings. Earthq. Eng. Struct. Dyn. 2014, 43, 1955–1974. [Google Scholar] [CrossRef]
- Koh, C.G.; Kelly, J.M. Effects of Axial Load on Elastomeric Isolation Bearings; EERC/UBC 86/12; Earthquake Engineering Research Center, College of Engineering, University of California: Springfield, CA, USA, 1987. [Google Scholar]
- Warn, G.P.; Whittaker, A.S.; Constantinou, M.C. Vertical Stiffness of Elastomeric and Lead–Rubber Seismic Isolation Bearings. J. Struct. Eng. 2007, 133, 1227–1236. [Google Scholar] [CrossRef]
- Koh, C.G.; Kelly, J.M. Viscoelastic stability model for elastomeric isolation bearings. J. Struct. Eng. 1989, 115, 285–302. [Google Scholar] [CrossRef]
- Gent, A.N.; Lindley, P.B. The compression of bonded rubber blocks. Proc. Inst. Mech. Eng. 1959, 173, 111–122. [Google Scholar] [CrossRef]
- Japan Road Association. Design Guide for Highway Bridges; Japan Road Association: Chiyoda-ku, Tokyo, Japan, 2012. (In Japanese) [Google Scholar]
- Ministry of Construction of the People’s Republic of China, China Architecture & Building Press (MOCPRC). Code for Seismic Design of Buildings; GB50011-2010; China Architecture & Building Press: Beijing, China, 2010. (In Chinese)
- Feng, D.; Miyama, T.; Ikenaga, M. A shaking table test study on shear tensile properties of lead rubber bearings. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Iwabe, N.; Takayama, M.; Kani, N.; Wada, A. Experimental Study on the Effect of Tension for Rubber Bearings. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000. [Google Scholar]
- Kato, R.; Oka, K.; Takayama, M. The tensile tests of natural rubber bearings focused on the effect of the steel flange plates. In Proceedings of the American Society of Mechanical Engineers, Pressure Vessels and Piping Division (Publication) PVP, Cleveland, OH, USA, 20–24 July 2003; Volume 466. [Google Scholar]
- Takayama, M.; Oka, K.; Kato, R. The tensile tests of natural rubber bearings focused on the effect of the steel flange plates. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Shoji, G.; Saito, K.; Kameda, T.; Fueki, T. Measurement of local strain field of a laminated rubber bearing under tensile axial loading. In Proceedings of the International Conference on Advances in Experimental Structural Engineering, Nagoya, Japan, 19–21 July 2005. [Google Scholar]
- Yamamoto, S.; Kikuchi, M.; Ueda, M.; Aiken, I.D. A Mechanical model for elastomeric seismic isolation bearings including the influence of axial load. Earthq. Eng. Struct. Dyn. 2009, 38, 157–180. [Google Scholar] [CrossRef]
- Kikuchi, M.; Aiken, I.D.; Kasalanati, A. Simulation analysis for the ultimate behavior of full-scale lead-rubber seismic isolation bearings. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 22–24 September 2012. [Google Scholar]
- Kikuchi, M.; Nakamura, T.; Aiken, I.D. Three-dimensional analysis for square seismic isolation bearings under large shear deformations and high axial loads. Earthq. Eng. Struct. Dyn. 2010, 39, 1513–1531. [Google Scholar] [CrossRef]
- McKenna, F.; Mazzoni, S.; Scott, M.H.; Fenves, G.L. Open System for earthquake engineering simulation (OpenSees) User Command-Language Manual. Pac. Earthq. Eng. Res. Cent. 2007. [Google Scholar]
- Kalpakidis, I.; Constantinou, M.C. Effects of heating on the behavior of lead-rubber bearings. II: Verification of Theory. J. Struct. Eng. 2009, 135, 1450–1461. [Google Scholar] [CrossRef]
- Griffith, M.C.; Aiken, I.D.; Kelly, J.M. Displacement control and uplift restraint for base-isolated structures. J. Struct. Eng. 1990, 116, 1135–1148. [Google Scholar] [CrossRef]
- Kasalanati, A.; Constantinou, M.C. Experimental Study of Bridge Elastomeric and Other Isolation and Energy Dissipation Systems with Emphasis on Uplift Prevention and High Velocity Near-Source Seismic Excitation; MCEER-99-0004; Multidisciplinary Center for Earthquake Engineering Research: Buffalo, NY, USA, 1999. [Google Scholar]
- Kelly, J.M.; Griffith, M.C.; Aiken, I.D. A Displacement Control and Uplift Restraint Device for Base Isolated Structures; Technical Report UCB/EERC-87/03; University of California: Berkeley, CA, USA, 1987. [Google Scholar]
- Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C. Experimental study of sliding isolated structures with uplift restraint. J. Struct. Eng. 1992, 118, 1666–1682. [Google Scholar] [CrossRef] [Green Version]
- Sumitomo Construction. Base-Isolated Buildings by Sumitomo Construction; Sumitomo Construction: Tokyo, Japan, 1990. [Google Scholar]
- Wang, X.-F.; Gould, P.L. Dynamics of structures with uplift and sliding. Earthq. Eng. Struct. Dyn. 1993, 22, 1085–1095. [Google Scholar] [CrossRef]
- Kelly, J.M. The Influence of Base Isolation on the Seismic Response of Light Secondary Equipment; Report No UCB/EERC-81/17; Earthquake Engineering Research Center (EERC), University of California: Berkeley, CA, USA, 1981. [Google Scholar]
- Zhou, Z.; Qian, J.; Huang, W.; Yao, K. Seismic damage assessment of a supertall tubed mega frame structure based on a simplified finite element model. Struct. Des. Tall Spec. Build. 2021, 30, e1846. [Google Scholar] [CrossRef]
- Roussis, P.C.; Constantinou, M.C. Uplift-restraining friction pendulum seismic isolation system. Earthq. Eng. Struct. Dyn. 2006, 35, 577–593. [Google Scholar] [CrossRef]
- Tsopelas, P.C.; Roussis, P.C.; Constantinou, M.C. Nonlinear dynamic analysis of multi-base seismically isolated structures with uplift potential I: Formulation. Earthq. Eng. Eng. Vib. 2009, 8, 421–431. [Google Scholar] [CrossRef]
- Roussis, P.C. Study on the effect of uplift-restraint on the seismic response of base-isolated structures. J. Struct. Eng. 2009, 135, 1462–1471. [Google Scholar] [CrossRef]
- Roussis, P.C.; Tsopelas, P.C.; Constantinou, M.C. Nonlinear dynamic analysis of multi-base seismically isolated structures with uplift potential II: Verification Examples. Earthq. Eng. Eng. Vib. 2010, 9, 83–91. [Google Scholar] [CrossRef]
- Kalpakidis, I.V.; Constantinou, M.C. Effects of heating on the behavior of lead-rubber bearings. I: Theory. J. Struct. Eng. 2009, 135, 1440–1449. [Google Scholar] [CrossRef]
- Kalpakidis, I.V.; Constantinou, M.C.; Whittaker, A.S. Modeling strength degradation in lead-rubber bearings under earthquake shaking. Earthq. Eng. Struct. Dyn. 2010, 39, 1533–1549. [Google Scholar] [CrossRef]
- Benzoni, G.; Bonessio, N.; Lomiento, G. Experimental performance and modeling of sliding anti-seismic devices. In Proceedings of the 7th World Conference on Joints, Bearings and Seismic Systems for Concrete Structures, Las Vegas, NV, USA, 2 October 2011. [Google Scholar]
- Lomiento, G.; Bonessio, N.; Benzoni, G. Concave sliding isolator’s performance under multi-directional excitation. Ing. Sismica 2013, 30, 17–32. [Google Scholar]
- Quaglini, V.; Bocciarelli, M.; Gandelli, E.; Dubini, P. Numerical assessment of frictional heating in sliding bearings for seismic isolation. J. Earthq. Eng. 2014, 18, 1198–1216. [Google Scholar] [CrossRef]
- Yenidogan, C.; Erdik, M. Effects of near-field earthquakes on seismically isolated bridges. In Proceedings of the 13th World Conference on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures-Commemorating JSSI 20th, Anniversary, Sendai, Japan, 24–27 September 2013. [Google Scholar]
- Alavi, B.; Krawinkler, H. Effects of Near-Fault Ground Motions on Frame Structures; John A. Blume Earthquake Engineering Center: Stanford, CA, USA, 2001. [Google Scholar]
- Anderson, J.C.; Bertero, V.V. Uncertainties in establishing design earthquakes. J. Struct. Eng. 1987, 113, 1709–1724. [Google Scholar] [CrossRef]
- Hall, J.F. (Ed.) Northridge Earthquake of 17 January 1994. Earthquake Engrg. Res. Inst. Oakland Calif. Reconnaissance Report, Earthquake Spectra. Supplement to Volume 11. 1994. Available online: https://bulletin.nzsee.org.nz/index.php/bnzsee/article/view/636 (accessed on 16 May 2021).
- Hall, J.F.; Heaton, T.H.; Halling, M.W.; Wald, D.J. Near-Source Ground Motion and Its Effects on Flexible Buildings. Earthq. Spectra 1995, 11, 569–605. [Google Scholar] [CrossRef]
- Hall, J.F.; Aagaard, B.T. Fundamentals of the Near-Source Problem. In Proceedings of the 5th Caltrans Seismic Research Workshop; California Department of Transportation Engineering Service Center: Sacramento, CA, USA, 1998. [Google Scholar]
- Iwan, W.D.; Huang, C.T.; Guyader, A.C. Evaluation of the Effects of Near-Source Ground Motions; Final Report; California Institute of Technology: Pasadena, CA, USA, 1998. [Google Scholar]
- Bertero, V.V.; Mahin, S.A.; Herrera, R.A. Aseismic design implications of near-fault San Fernando earthquake records. Earthq. Eng. Struct. Dyn. 1978, 6. [Google Scholar] [CrossRef]
- Somerville, P.G.; Smith, N.F.; Graves, R.W.; Abrahamson, N.A. Modification of empirical strong ground motion attenuation relations to include the amplitude and duration effects of rupture directivity. Seismol. Res. Lett. 1997, 68, 199–222. [Google Scholar] [CrossRef]
- Liu, C.; Fang, D.; Yan, Z. Seismic fragility analysis of base isolated structure subjected to near-fault ground motions. Period. Polytech. Civ. Eng. 2021. [Google Scholar] [CrossRef]
- Irikura, K.; Miyake, H. Recipe for predicting strong ground motion from crustal earthquake scenarios. Pure Appl. Geophys. 2011, 168, 85–104. [Google Scholar] [CrossRef] [Green Version]
- Irikura, K.; Miyake, H. Prediction of strong ground motions for scenario earthquakes. J. Geogr. 2001, 110, 849–875. [Google Scholar] [CrossRef]
- Cardone, D.; Gesualdi, G.; Brancato, P. Restoring capability of friction pendulum seismic isolation systems. Bull. Earthq. Eng. 2015, 13, 2449–2480. [Google Scholar] [CrossRef]
- Katsaras, C.P.; Panagiotakos, T.B.; Kolias, B. Restoring capability of bilinear hysteretic seismic isolation systems. Earthq. Eng. Struct. Dyn. 2008, 37, 557–575. [Google Scholar] [CrossRef]
- Ponzo, F.C.; Di Cesare, A.; Leccese, G.; Nigro, D. Shake table testing on restoring capability of double concave friction pendulum seismic isolation systems. Wiley Online Libr. 2017, 46, 2337–2353. [Google Scholar] [CrossRef]
- Quaglini, V.; Gandelli, E.; Dubini, P. Experimental investigation of the re-centering capability of curved surface sliders. Struct. Control. Health Monit. 2017, 24, e1870. [Google Scholar] [CrossRef]
- Yenidogan, C.; Erdik, M. The State of art in seismic isolation and energy dissipation devices, Vol. 83, No.2, pp. 49–59. J. Jpn. Soc. Seism. Isol. (Menshin) 2014, 83, 49–59. [Google Scholar]
- Di Sarno, L.; Yenidogan, C.; Erdik, M. Field evidence and numerical investigation of the Mw = 7.1 October 23 Van, Tabanli and the Mw > 5.7 November Earthquakes of 2011. Bull. Earthq. Eng. 2013, 11, 313–346. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | ASCE/SEI 7-16 | BSLOE-2000,2016 | NTC-08 |
|---|---|---|---|
| Limitations on site seismicity | S1 ≤ 0.6 g | ||
| Limitations on site class | A, B, C, D | 1,2 | |
| Maximum plan dimensions | |||
| Maximum height of buildings | ≤19.8 | ||
| Maximum number of stories | 4 | ||
| Location of isolation units | Base of columns | ||
| Limitations on eccentricity | 3% | 3% | |
| Kv/Ke | |||
| Tension in isolators | Allowed | Not Allowed | Not Allowed |
| Minimum yield strength | 0.03 | ||
| Period range of isolated structure | 3 | Tisol | 3 |
| Maximum vertical Period (Tv) | |||
| Importance Factor | Based on the request of control mechanism | EC8 = 1.4 NTC-08 VR (VN, CU) |
| Parameter | ASCE/SEI 7-16 | BSLOE-2000,2016 | NTC-08 |
|---|---|---|---|
| Effective Period ( | |||
| Characteristic Strength () | - | Min. Value = 0.03 | - |
| Displacement Demand DD, M | |||
| Effective Damping ( | |||
| Damping Reduction Factor | Tabulated Values of ≤ 1.7 | Min = 0.4; Max = 1.0 | |
| Amplification Factor for Torsion | Constant Value = 1.1 | ||
| Property Modification Factors | Constant Factor, 1.2 | EN-15129 code-requirements | |
| Base Shear | VBM = KM*DM | VBD = KDDM | VBM,D = KM,D·DM,D |
| Limitation Vertical Period | - | - | Tv ≤ 0.1 |
| Input Parameters of Spectrum | S1, Ss, TL (2-Level) | PGA | PGA |
| Displacement Safety Factor | Implicit in the definition of MCE level | Device Specific β factor (1–1.2) | 1.2 (Recommended Reliability Index Value) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yenidogan, C. Earthquake-Resilient Design of Seismically Isolated Buildings: A Review of Technology. Vibration 2021, 4, 602-647. https://doi.org/10.3390/vibration4030035
Yenidogan C. Earthquake-Resilient Design of Seismically Isolated Buildings: A Review of Technology. Vibration. 2021; 4(3):602-647. https://doi.org/10.3390/vibration4030035
Chicago/Turabian StyleYenidogan, Cem. 2021. "Earthquake-Resilient Design of Seismically Isolated Buildings: A Review of Technology" Vibration 4, no. 3: 602-647. https://doi.org/10.3390/vibration4030035
APA StyleYenidogan, C. (2021). Earthquake-Resilient Design of Seismically Isolated Buildings: A Review of Technology. Vibration, 4(3), 602-647. https://doi.org/10.3390/vibration4030035