

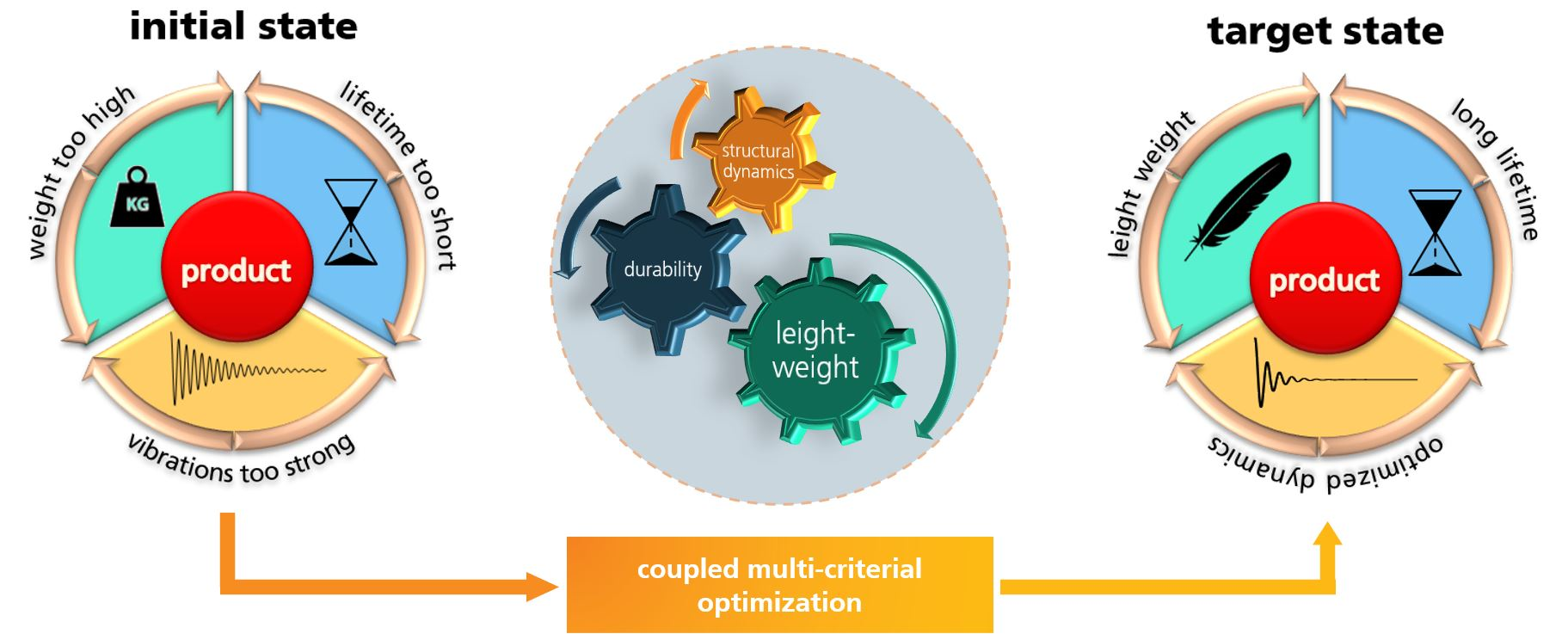
Numerical Approach to Optimize the Dynamic Behaviour of Structures Considering Structural Durability

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Modelling of Dynamic System Behaviour
2.1.1. Model Order Reduction Methods
2.1.2. Modal Approach
2.1.3. System Formulation
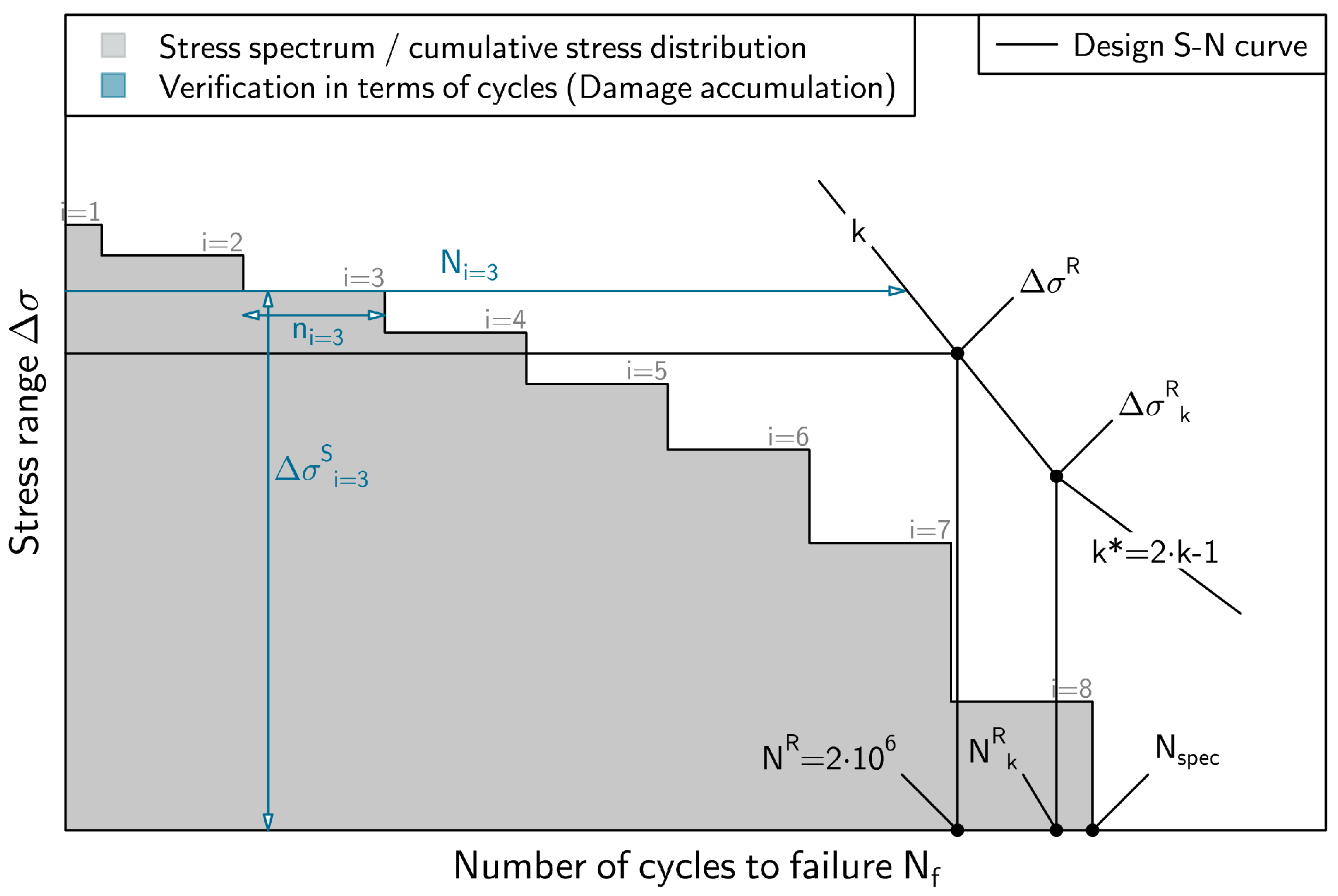
2.2. Fatigue Strength Assessment
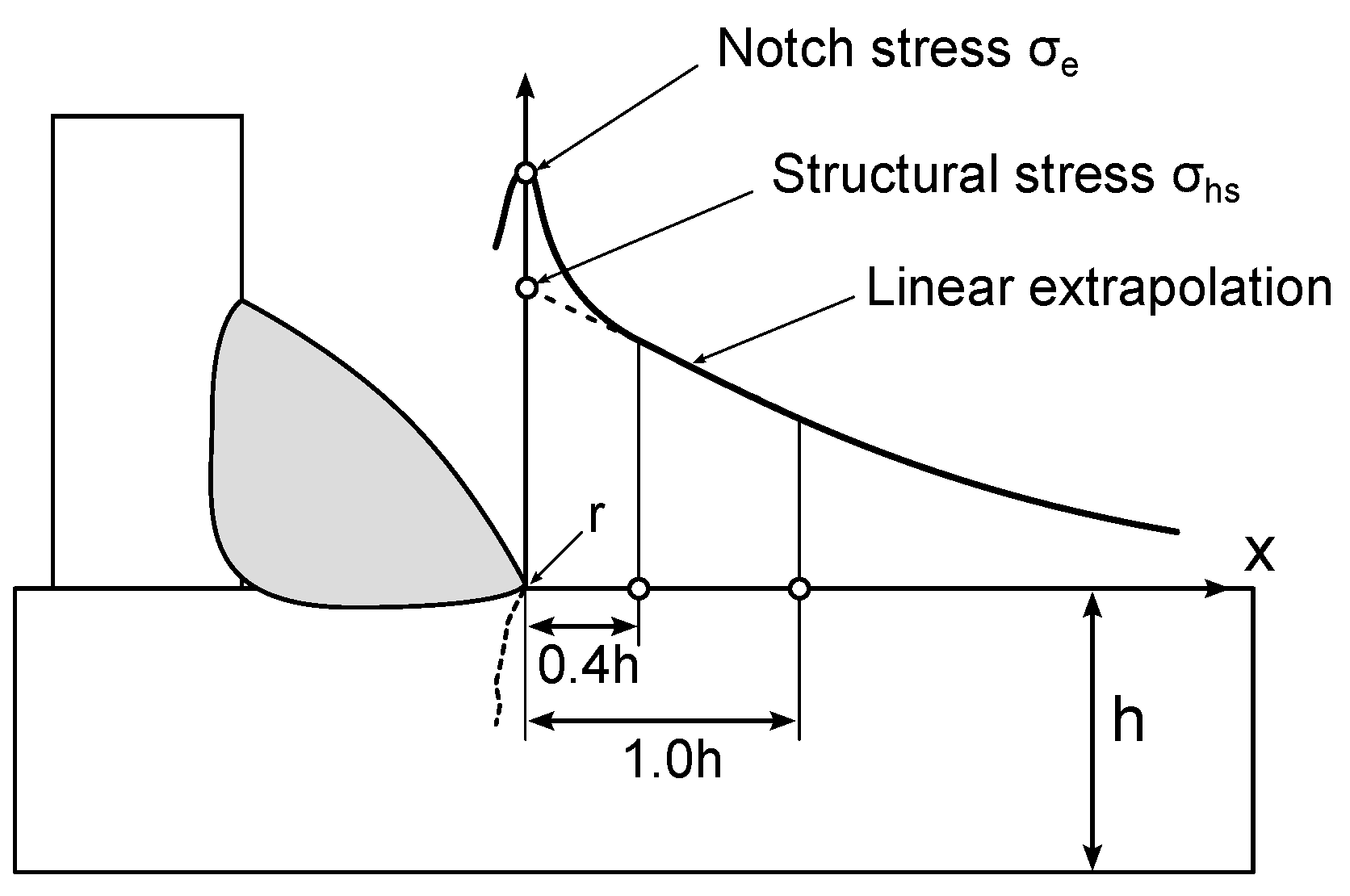
2.2.1. Linear-Elastic Approaches
2.2.2. Application for Welded Joints
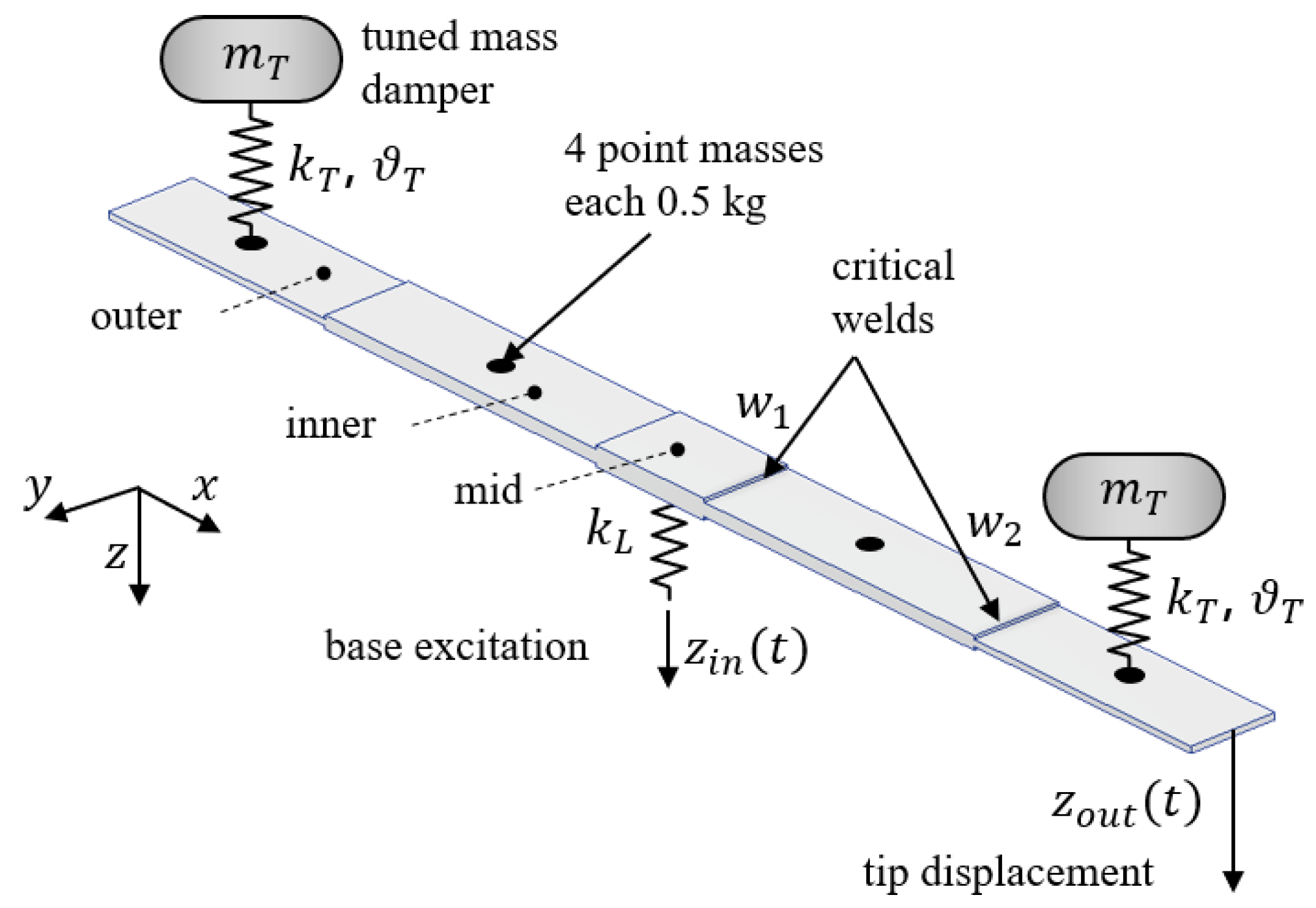
2.3. Application Model
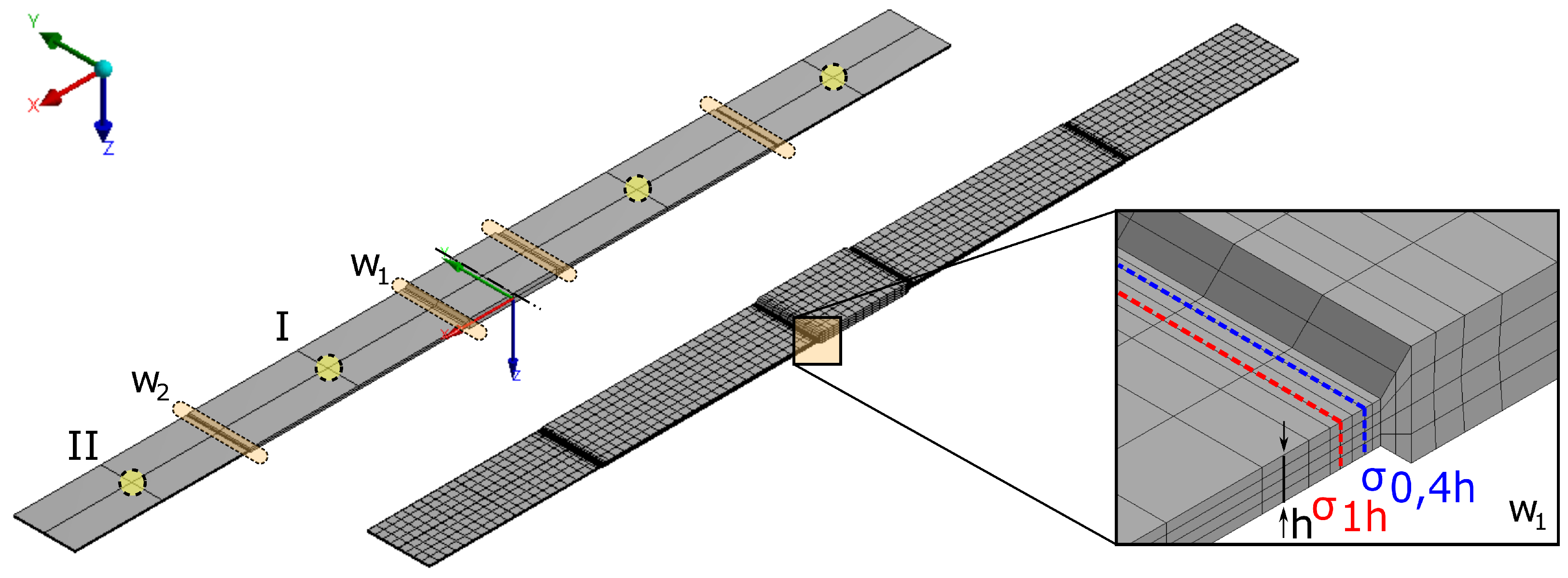
2.3.1. Finite-Element Model
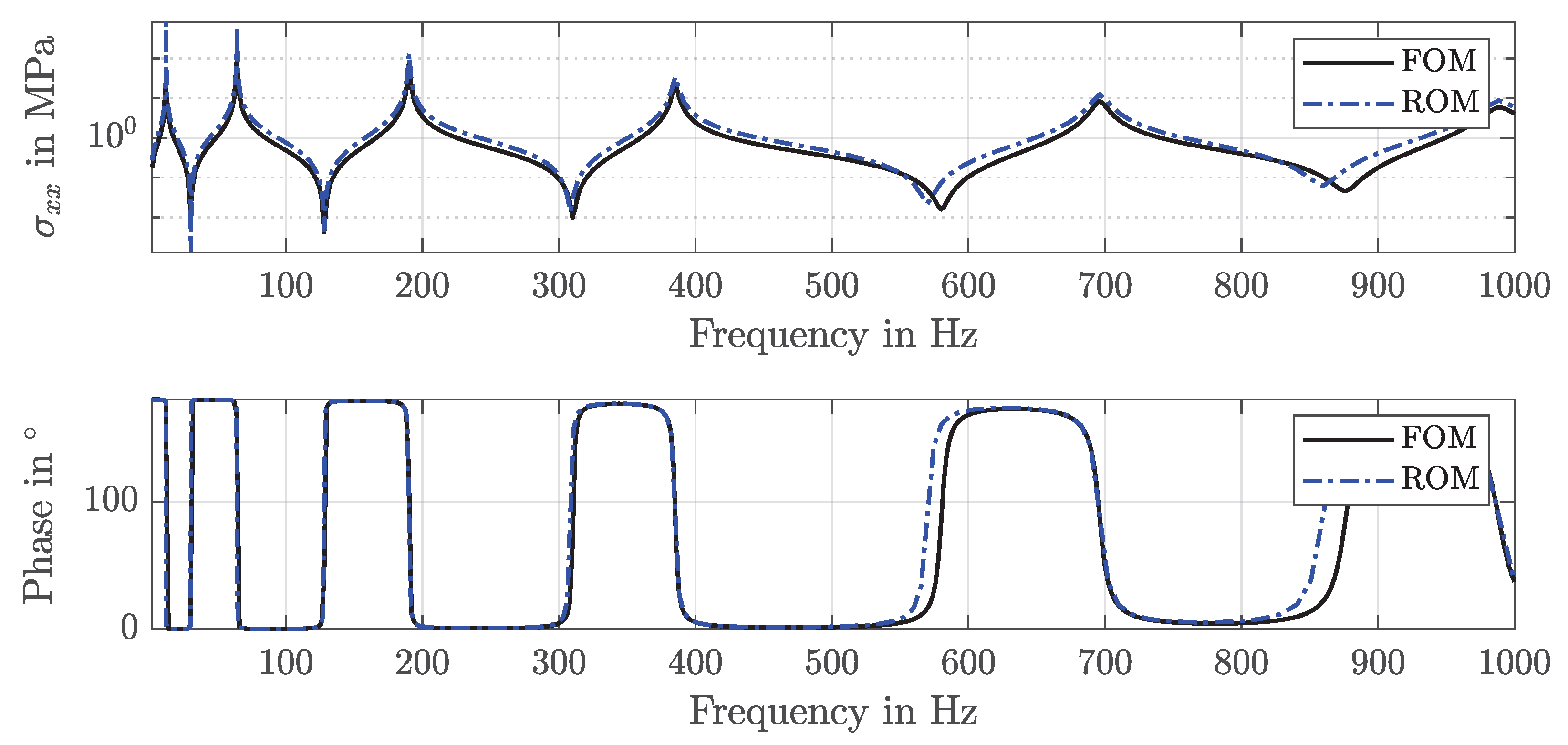
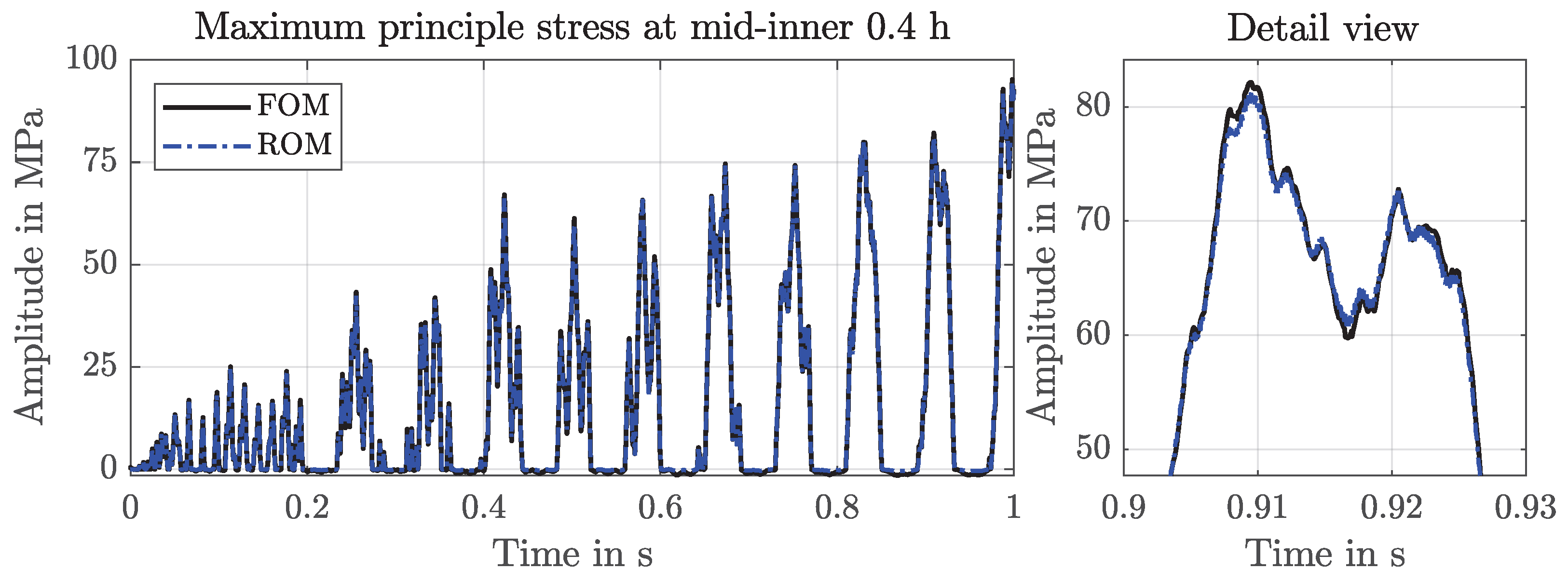
2.3.2. Verification
3. Results and Discussion
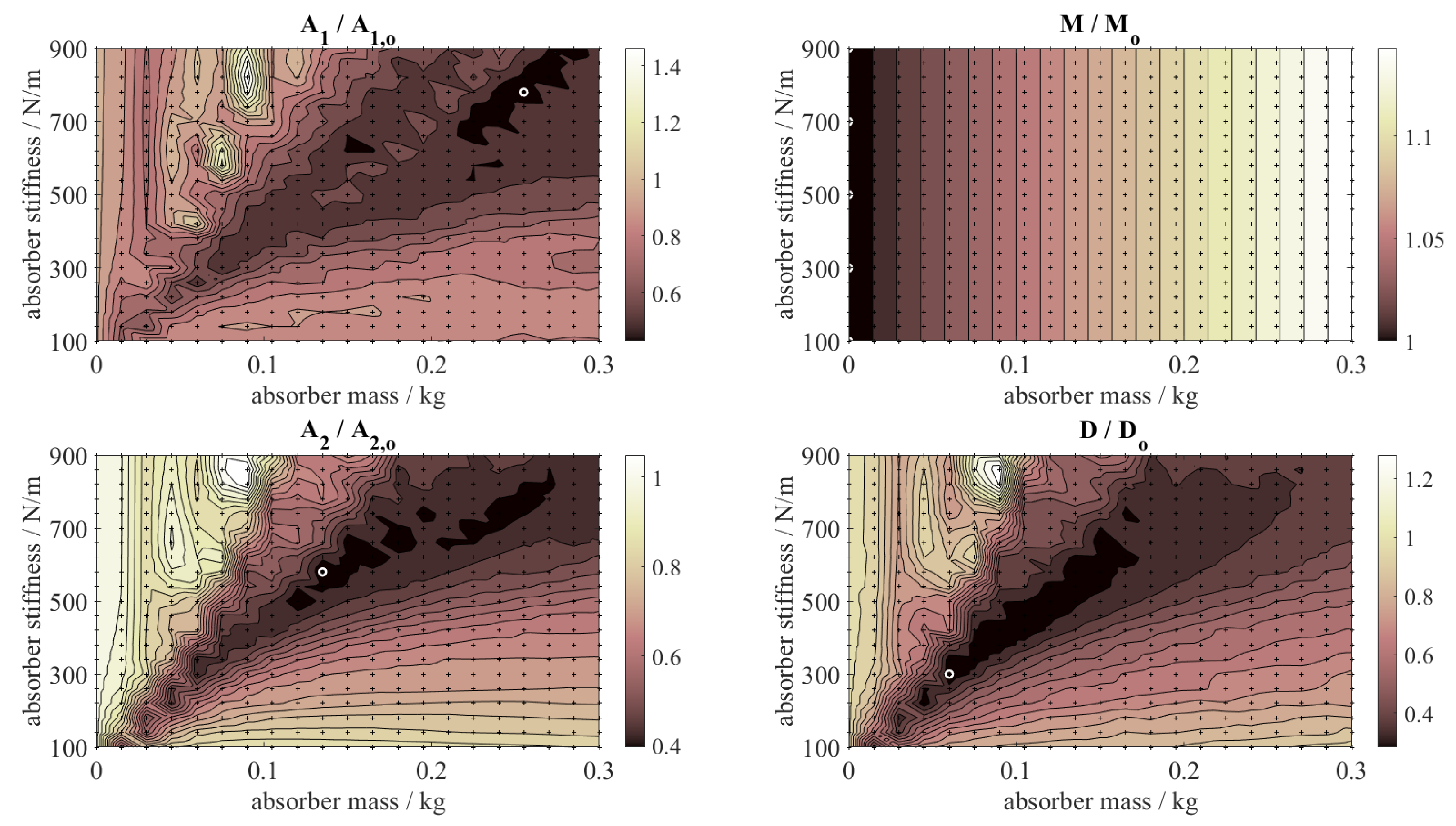
3.1. Optimization
3.1.1. Mono-Criterial Optimization
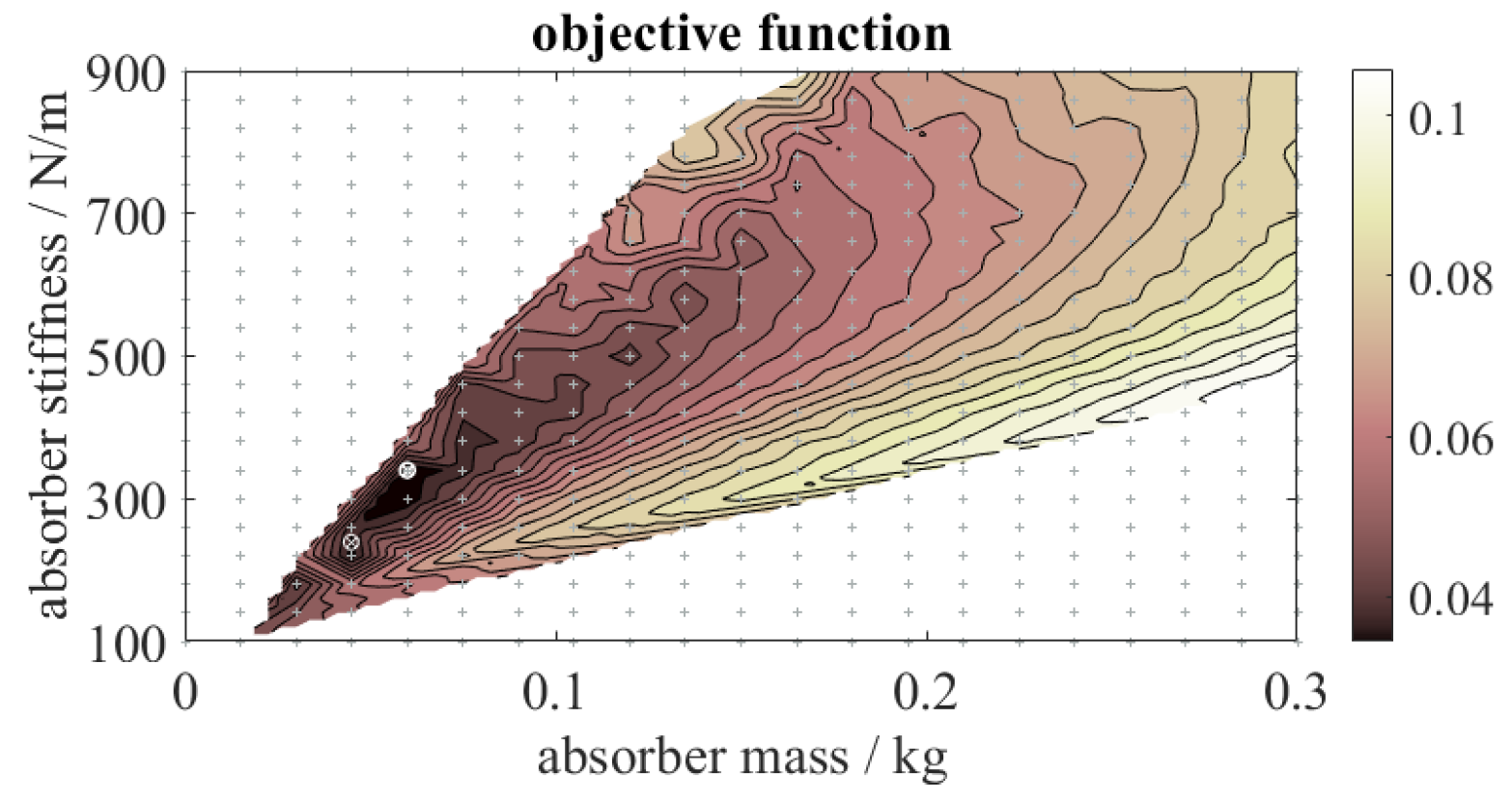
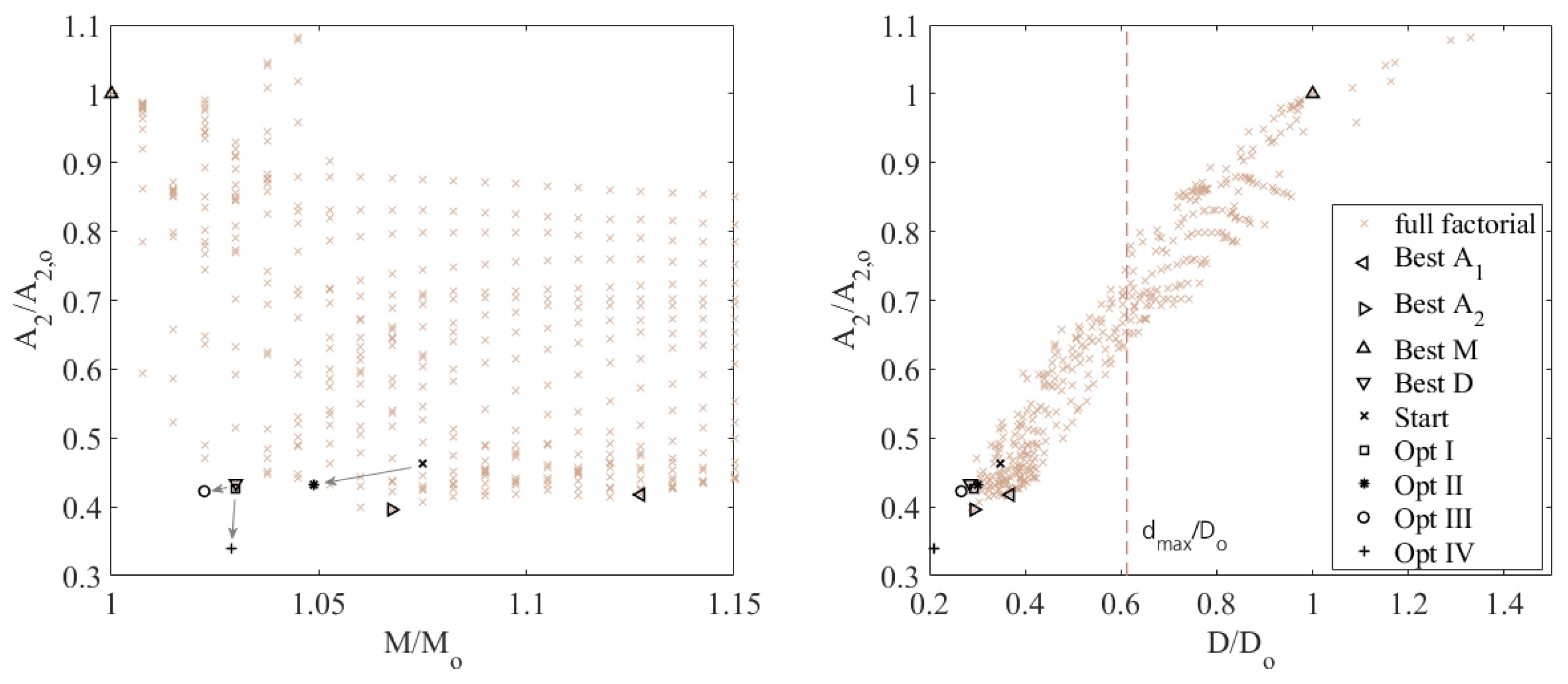
3.1.2. Multi-Criterial Optimization
4. Conclusions
- Numerically efficient assessment of dynamically loaded structures with critical welds is possible using reduced order model methods and structural stress approach;
- For a limited number of design variables, a full factorial simulation helps to understand the system and identify conflicting objectives between different criteria;
- If a single cost function is defined combining the different objectives, a careful selection of the optimization algorithm and start values is recommended in order to avoid trusting optimization results arising from local minima;
- Moreover, the robustness of the optimum should be analysed with respect to the optimization parameters. In case of doubt, a robust, less good design point is preferable to an optimal but very sensitive design point.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAD | Computer-Aided Design |
| DOF | Degree Of Freedom |
| FE | Finite Element |
| FEM | Finite Element Method |
| FOM | Full Order Model |
| MDO | Multidisciplinary Optimization |
| MOR | Model Order Reduction |
| MPC | Multi-Point Constraint |
| ODE | Ordinary Differential Equation |
| RBE | Rigid Body Element |
| ROM | Reduced Order Model |
| TMD | Tuned Mass Damper |
| Nomenclature | |
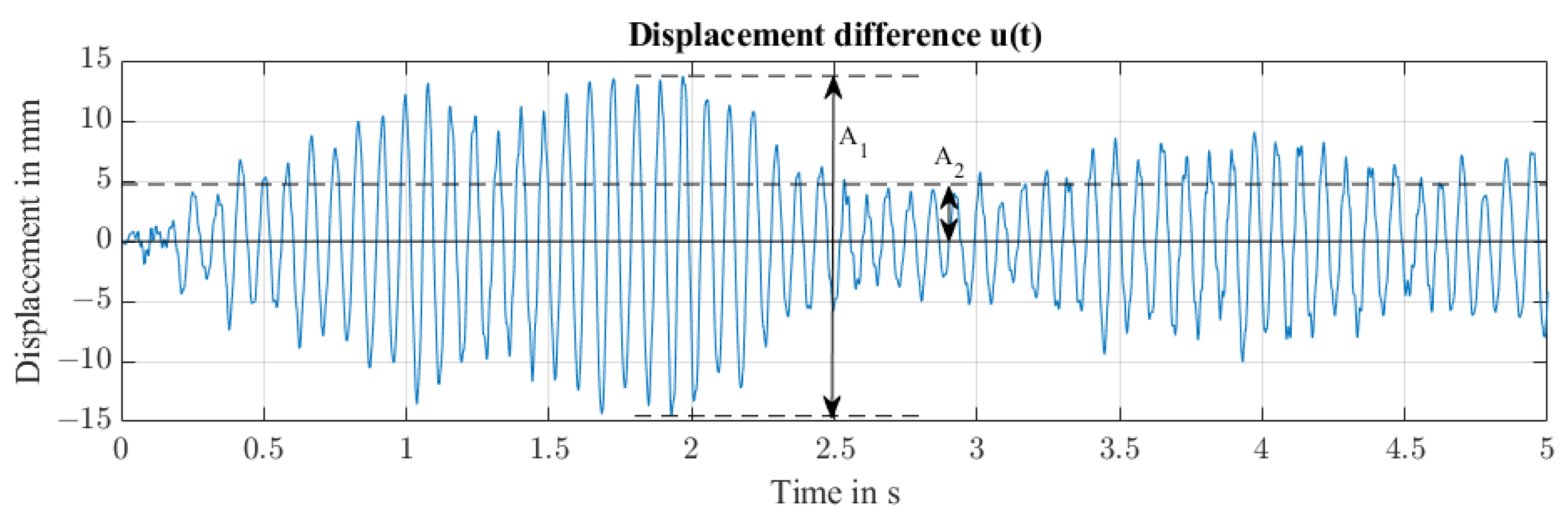
| maximum displacement range | |
| mean displacement | |
| N | number of cycles |
| D | damage |
| damage threshold | |
| E | Young’s modulus |
| G | shear modulus |
| Poisson’s ratio | |
| k | slope of S–N curve |
| h | thickness of sheet metal |
| maximum principal stress | |
| S | overall cost function |
| structural dynamics cost function based on | |
| structural dynamics cost function based on | |
| lightweight cost function | |
| durability cost function based on D | |
| t | time |
| time step | |
| simulation time | |
| M | mass |
| S | dimensionless goal function |
| absorber mass | |
| mass of the base structure | |
| absorber stiffness | |
| absorber eigenfrequency | |
| damping ratio of absorber | |
| optimization parameter in weighting function | |
| optimization parameter in weighting function | |
| input displacement | |
| output displacement | |
| u | relative displacement |
| welds | |
| H | Heaviside step function |
| second order stress tensor | |
| second order strain tensor | |
| fourth order material tensor | |
| u | displacement |
| displacement vector | |
| modal coordinate vector | |
| stiffness matrix | |
| damping matrix | |
| mass matrix | |
| output matrix | |
| input matrix | |
| modal matrix | |
| modal stress matrix |
References
- Alexandrov, N.M.; Hussaini, M.Y. (Eds.) Multidisciplinary Design Optimization: State of the Art; SIAM Proceedings Series; SIAM: Philadelphia, PA, USA, 1997. [Google Scholar]
- Blachut, J. Emerging Methods for Multidisciplinary Optimization; CISM International Centre for Mechanical Sciences; Springer International Publishing: Cham, Switzerland, 2021; Volume 425. [Google Scholar]
- Salagame, R.R.; Ramu, P.; Narayanaswamy, I.; Saxena, D.K. Advances in Multidisciplinary Analysis and Optimization; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- El-Sayed, M.; Lund, E. Structural optimization with fatigue life constraints. Eng. Fract. Mech. 1990, 37, 1149–1156. [Google Scholar] [CrossRef]
- Zhao, L.; Xu, B.; Han, Y.; Xue, J.; Rong, J. Structural topological optimization with dynamic fatigue constraints subject to dynamic random loads. Eng. Struct. 2020, 205, 110089. [Google Scholar] [CrossRef]
- Zeiler, T. Use of structural dynamic and fatigue sensitivity derivatives in an automotive design optimization. Struct. Multidiscip. Optim. 2002, 23, 390–397. [Google Scholar] [CrossRef]
- Häußler, P.; Albers, A. Shape optimization of structural parts in dynamic mechanical systems based on fatigue calculations. Struct. Multidiscip. Optim. 2005, 29, 361–373. [Google Scholar] [CrossRef] [Green Version]
- Miao, B.; Luo, Y.; Peng, Q.; Qiu, Y.; Chen, H.; Yang, Z. Multidisciplinary design optimization of lightweight carbody for fatigue assessment. Mater. Des. 2020, 194, 108910. [Google Scholar] [CrossRef]
- Han, Y.; Xu, B.; Duan, Z.; Huang, X. Stress-based bi-directional evolutionary structural topology optimization considering nonlinear continuum damage. Comput. Methods Appl. Mech. Eng. 2022, 396, 115086. [Google Scholar] [CrossRef]
- Chen, Z.; Long, K.; Wen, P.; Nouman, S. Fatigue-resistance topology optimization of continuum structure by penalizing the cumulative fatigue damage. Adv. Eng. Softw. 2020, 150, 102924. [Google Scholar] [CrossRef]
- Faes, M.G.; Valdebenito, M.A. Fully decoupled reliability-based design optimization of structural systems subject to uncertain loads. Comput. Methods Appl. Mech. Eng. 2020, 371, 113313. [Google Scholar] [CrossRef]
- Martins, J.R.R.A.; Lambe, A.B. Multidisciplinary Design Optimization: A Survey of Architectures. AIAA J. 2013, 51, 2049–2075. [Google Scholar] [CrossRef] [Green Version]
- Meng, D.; Yang, S.; Zhang, Y.; Zhu, S.P. Structural reliability analysis and uncertainties-based collaborative design and optimization of turbine blades using surrogate model. Fatigue Fract. Eng. Mater. Struct. 2019, 42, 1219–1227. [Google Scholar] [CrossRef]
- Mahiddini, B.; Chettibi, T.; Benfriha, K.; Aoussat, A. Multidisciplinary design optimization of a gear train transmission. Concurr. Eng. 2019, 27, 268–281. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Zhu, J.; Taylor, R.L. The Finite Element Method: Its Basis and Fundamentals, 7th ed.; Elsevier: Amsterdam, The Netherlands; Boston, MA, USA; Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Pozrikidis, C. Introduction to Finite and Spectral Element Methods Using MATLAB®, 2nd ed.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2014. [Google Scholar]
- Breitbach, E. Modal Synthesis Modal Correction—Modal Coupling. In Identification of Vibrating Structures; Natke, H.G., Ed.; Springer: Vienna, Austria, 1982; pp. 321–348. [Google Scholar]
- Qu, Z.Q. Model Order Reduction Techniques: With Applications in Finite Element Analysis; Springer: London, UK, 2004. [Google Scholar]
- Pelayo, F.; Skafte, A.; Aenlle, M.L.; Brincker, R. Modal Analysis Based Stress Estimation for Structural Elements Subjected to Operational Dynamic Loadings. Exp. Mech. 2015, 55, 1791–1802. [Google Scholar] [CrossRef]
- ASTM E1049-85; Standard Practice for Cycle Counting in Fatigue Analysis. ASTM: West Conshohocken, PA, USA, 2005.
- Hobbacher, A.F. Recommendations for Fatigue Design of Welded Joints and Components; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Baumgartner, J.; Waterkotte, R.; Hesseler, J. Fatigue assessment of a welded automotive differential under multiaxial and variable amplitude loading. Int. J. Fatigue 2021, 149, 106292. [Google Scholar] [CrossRef]
- Rennert, R.; Kullig, E.; Vormwald, M.; Esderts, A.; Siegele, D. Analytical strength assessment of components: FKM Guideline, 7th ed.; VDMA: Frankfurt, Germany, 2020. [Google Scholar]
- Radaj, D.; Sonsino, C.M.; Fricke, W. Fatigue Assessment of Welded Joints by Local Approaches; Woodhead Publishing Limited: Soston, UK, 2006. [Google Scholar] [CrossRef]
- Niemi, E.; Fricke, W.; Maddox, S.J. Structural Hot-Spot Stress Approach to Fatigue Analysis of Welded Components; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Baumgartner, J.; Hobbacher, A.F.; Rennert, R. Fatigue assessment of welded thin sheets with the notch stress approach—Proposal for recommendations. Int. J. Fatigue 2020, 140, 105844. [Google Scholar] [CrossRef]
- ANSYS Inc. ANSYS Software Package Version 2021 R2; ANSYS Inc.: Canonsburg, PA, USA, 2021; Available online: https://www.ansys.com (accessed on 26 June 2023).
- Hoffman, J.; Frankel, S. Numerical Methods for Engineers and Scientists; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- The MathWorks Inc. Software, MATLAB Version: 9.9.0.1718557 (R2020b); The MathWorks Inc.: Natick, MA, USA, 2020; Available online: https://www.mathworks.com (accessed on 26 June 2023).
- Zienkiewicz, O.C. The Finite Element Method in Engineering Science, 2nd ed.; McGraw-Hill: London, UK, 1971. [Google Scholar]
- Haupt, P. Continuum Mechanics and Theory of Materials, 2nd ed.; Advanced Texts in Physics; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Clough, R.; Penzien, J. Dynamics of Structures; International Student Edition; McGraw-Hill: New York, NY, USA, 1975. [Google Scholar]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Mirjalili, S.; Jangir, P.; Saremi, S. Multi-objective ant lion optimizer: A multi-objective optimization algorithm for solving engineering problems. Appl. Intell. 2017, 46, 79–95. [Google Scholar] [CrossRef]
- Lagarias, J.C.; Reeds, J.A.; Wright, M.H.; Wright, P.E. Convergence properties of the Nelder–Mead simplex method in low dimensions. SIAM J. Optim. 1998, 9, 112–147. [Google Scholar] [CrossRef] [Green Version]
- Sawaragi, Y.; Nakayama, H.; Tanino, T. Theory of Multiobjective Optimization; Elsevier: Amsterdam, The Netherlands, 1985. [Google Scholar]
- Koessler, E.; Almomani, A. Hybrid particle swarm optimization and pattern search algorithm. Optim. Eng. 2021, 22, 1539–1555. [Google Scholar] [CrossRef]
- Muñiz-Calvente, M.; Álvarez-Vázquez, A.; Pelayo, F.; Aenlle, M.; García-Fernández, N.; Lamela-Rey, M.J. A comparative review of time- and frequency-domain methods for fatigue damage assessment. Int. J. Fatigue 2022, 163, 107069. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Length | Width | Thickness | Add. Mass | Base Stiff. |
|---|---|---|---|---|---|
| m | m | m | kg | N/m | |
| Outer | 0.20 | 0.07 | 2 × 10−3 | 0.5 | - |
| Inner | 0.25 | 0.07 | 4 × 10−3 | 0.5 | - |
| Mid | 0.10 | 0.07 | 10 × 10−3 | - | 1 × 10−8 |
| Type | FOM 1 s | ROM ANSYS 1 s | ROM 1 s | ROM 30 s |
|---|---|---|---|---|
| Time |
| Goal | |||||||
|---|---|---|---|---|---|---|---|
| kg | N/m | Hz | |||||
| 0.255 | 780 | 8.85 | 0.4297 | 0.4176 | 1.1275 | 0.3688 | |
| 0.135 | 580 | 10.50 | 0.5224 | 0.3959 | 1.0675 | 0.2930 | |
| M | 0.000 | - | - | 1.0000 | 1.0000 | 1.0000 | 1.0000 |
| D | 0.060 | 300 | 10.98 | 0.6242 | 0.4340 | 1.0300 | 0.2843 |
| Method | S | Numb. | ||||
|---|---|---|---|---|---|---|
| kg | N/m | % | Hz | - | Eval. | |
| I | 0.0600 | 340.0 | 3.0 | 11.98 | 0.03443 | 441 |
| II | 0.0976 | 412.0 | 3.0 | 10.34 | 0.04260 | 44 |
| III | 0.0448 | 239.2 | 3.0 | 11.63 | 0.03096 | 485 |
| IV | 0.0581 | 300.4 | 5.9 | 11.44 | 0.02582 | 485 |
| Method | ||||
|---|---|---|---|---|
| I | 0.6309 | 0.4267 | 1.0300 | 0.2925 |
| II | 0.5424 | 0.4329 | 1.0488 | 0.3009 |
| III | 0.5568 | 0.4227 | 1.0224 | 0.2666 |
| IV | 0.4670 | 0.3398 | 1.0291 | 0.2090 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaal, W.; Baumgartner, J.; Budnik, M.; Tamm, C. Numerical Approach to Optimize the Dynamic Behaviour of Structures Considering Structural Durability. Vibration 2023, 6, 477-493. https://doi.org/10.3390/vibration6030030
Kaal W, Baumgartner J, Budnik M, Tamm C. Numerical Approach to Optimize the Dynamic Behaviour of Structures Considering Structural Durability. Vibration. 2023; 6(3):477-493. https://doi.org/10.3390/vibration6030030
Chicago/Turabian StyleKaal, William, Jörg Baumgartner, Maximilian Budnik, and Christoph Tamm. 2023. "Numerical Approach to Optimize the Dynamic Behaviour of Structures Considering Structural Durability" Vibration 6, no. 3: 477-493. https://doi.org/10.3390/vibration6030030
APA StyleKaal, W., Baumgartner, J., Budnik, M., & Tamm, C. (2023). Numerical Approach to Optimize the Dynamic Behaviour of Structures Considering Structural Durability. Vibration, 6(3), 477-493. https://doi.org/10.3390/vibration6030030