1. Introduction
Archaeological hypogeum sites are a significant part of Cultural Heritage (CH) to be preserved. Among the several typologies of artificial cavities dug by people in the subsoil for different purposes, the ones used for religious or burial worshipping could contain relevant artefacts like mural paintings, graffiti, and ancient reliefs, which often came down to us in a good state of conservation thanks to their isolation from anthropic action and to the constant indoor conditions [
1]. Several archaeological hypogeal sites throughout the Mediterranean basin are indeed characterized by similar environmental conditions with humidity above 95%, relatively low temperatures, little or no air circulation, and a saturated concentration of CO
2 [
2]; these values, albeit not optimal, establish an equilibrium and remain stable without fluctuations, favoring the conservation of wall paintings and other findings. Sudden short-term or high variations of these circumstances, due to the presence of visitors, represent a risk as they compromise the integrity of the microclimate and can accelerate degradation phenomena, i.e., the biodeterioration and the growth of microorganisms. Due to the impact of an audience of visitors on such a fragile equilibrium, the opening of this kind of site should be carefully considered [
3]. Considering these aspects, the virtual accessibility of underground sites represents a strategic solution to protect those sites from the risks related to visitors’ physical fruition and at the same time to promote the knowledge of them and their visibility. The realistic virtualization of underground sites should be promoted for environments which are unsafe, vulnerable, or hard or impossible to access.
In this scenario, survey and 3D documentation are fundamental processes for understanding, visualizing, and preserving underground sites [
4], and modern geomatics techniques can be a valuable aid for this purpose [
5]. The acquisition of the metric data, however, could be affected by the environmental conditions and construction factors (such as poor or absent natural lighting, dump air with no artificial ventilation, narrow passages and articulated paths, etc.), and working in underground confined sites requires rapid methodologies which address this complexity through multiple approaches [
6].
Laser scanning technologies are among the fastest and most reliable approaches to directly capture 3D data and are the ideal main technologies to be used inside hypogeum sites for their ability to detect surfaces even in total darkness conditions [
7]. On the other hand, close-range photogrammetry is generally used to obtain a highly detailed photographic texture which conveys correct coloration information [
8]. Both technologies allow the acquisition of extremely detailed point clouds with high resolution and they can be used to create 3D mesh models. The availability of textures which enable a realistic appearance of the model is of great importance when these models are exploited for visualization and digital fruition purposes. Indeed, from this point of view, the use of photogrammetric techniques based on Structure-from-Motion (SfM) algorithms represents a great advantage because it allows the acquisition of 3D models with realistic and very high-quality textures. In the case of hypogeum sites, the integration of both methodologies maximizes the accuracy and the quality of the documentation of both the geometric components and the description of details or decorations [
5]. Furthermore, the integration of the two techniques makes it possible to acquire even the most difficult or least accessible parts and to obtain 3D models free from gaps or holes. After their acquisition, the 3D data should, however, be further processed for the generation of a digital model suitable for visualization remotely and ready to be implemented for virtualization purposes.
The latest advances in computer science led specialists to explore new strategies in the field of Virtual Reality (VR) and Augmented Reality (AR). VR applications are now widely diffused [
9]. These solutions allow the exploration of a computer-simulated environment offering users an alternative for exploring the reality with standard devices (desktop and mobile ones) or multimodal devices [
10]. The VR technology was recently combined with game-based approaches (serious games) for educational and training purposes, useful to diffuse knowledge to the target audience in many application fields [
11,
12,
13,
14].
Even in the field of CH, VR applications have allowed the spread of the knowledge about monuments, museums, and archaeological sites [
15] by simulating realistic 3D reconstructions of past configurations through geomatics techniques [
16,
17,
18,
19]. This kind of application usually requires the adoption of proprietary software or the use of special multimodal devices [
20,
21].
Recently, the rapid and broad diffusion of fast and mobile internet connections focused the interest of researchers on finding new solutions for VR navigation systems accessible on the web, based on Web Virtual Reality (WebVR) technology. This solution provides the web exploration of complex 3D textured contents, using web browser capabilities [
22]. The leading actor of WebVR is the Web Graphic Library (WebGL) solution [
23]. This technology, based on the OpenGL standard and integrated in JavaScript open-source libraries, allows the generation of a 3D VR environment by exploiting web browser capabilities, with no client-side installation of any application [
24]. The use of WebGL enhances the level of accessibility, allowing users to explore the VR environment directly using any kind of device (desktop and mobile). Moreover, the integration of head-mounted displays has been used to assist students for educational purposes, offering immersive interactive virtual experiences [
25]. The WebGL skills led researchers to integrate this OpenGL-based technology in many fields of research to improve the accessibility of information [
26,
27,
28,
29]. On the other hand, the data to be uploaded on the web must be kept in a small file, and this still represents the main challenge of this technology [
30]. The bottleneck of the size limitation still prevents the application of WebVR for large public scenarios, but, at the same time, the implementation of lightweight technologies was recently studied to solve this issue [
31].
New WebGL integrations applied for CH valorization have allowed users to explore archaeological sites virtually on the web [
32], with the possibility to navigate inside CH sites with limited accessibility [
33]. Even in this context, the main challenge regards the size limitation of the geometrical information. Indeed, the limited number of geometrical elements to be loaded on web browsers still remains the main challenge for the use of this technology [
34]. To exploit the possibilities offered by WebGL, recent experimentations were carried out by developing JavaScript codes based on the native WebGL libraries (avoiding pre-compiled WebGL encapsulations). This last solution was adopted to generate multiscale 3D visualization models of complex urban datasets [
34].
This study applied a similar approach to the web 3D virtual fruition of a hypogeum archaeological site. Specifically, this paper discusses the survey, the dissemination of 3D contents, and the virtual navigation system of the so-called hypogeum of
Crispia salvia, a Roman underground site belonging to the Archaeological Park of Lilibeo-Marsala (Marsala, southern Italy). This work describes in detail a case study previously generally described in research which involved hypogeum sites of the ancient Roman city of Lylibaeum [
35]. This hypogeum is one of the most important archaeological discoveries of that area for its extraordinary Roman frescoes, but it is currently not open to the public in order to preserve its integrity. The physical accessibility to the site is also limited because it is located underneath a residential building. The poor accessibility to the extraordinary frescoes led researchers to focus their scientific interest on the virtualization of the site to offer visitors the possibility to explore the hypogeum virtually while they are immersed inside the urban context around it. In this case, web exploration can improve the knowledge of the cultural site, offering visitors the possibility to explore it on the web in a virtual and interactive way. This site was also subject to other research activities focused mainly on digitization purposes [
36].
To develop the virtual navigation system, it was necessary to survey the hypogeum and the surrounding environment at different levels of detail with Terrestrial Laser Scanning (TLS) and photogrammetric technologies. The whole acquired 3D environment then was adapted to be implemented in a WebGL environment. A web framework was designed to host the virtual navigation at different scales. The solution proposed in this study is based on the implementation of WebGL JavaScript libraries for the creation of a 3D navigation model explorable on the web, using the most common web browsers (Chrome, Firefox, Safari). The 3D navigation model includes the visualization of the hypogeum site and its surroundings, granting a multiscale level of navigation.
The paper is organized as follows: in
Section 2 the hypogeum of
Crispia salvia and its history are described;
Section 3 describes the materials and methods adopted in this case study; results are shown in
Section 4; the main challenges and features of the work are discussed and analyzed in
Section 5 while concluding remarks and possible future implementations of the work were reported in
Section 6.
2. The Hypogeum of Crispia salvia in Lylibaeum
Lylibaeum (nowadays Marsala) was founded in the 4th century B.C. by the Carthaginians in western Sicily. After a century it became a Roman colony, whose remains are preserved in the 28-hectare area of the Archaeological Park of Lilibeo-Marsala. This park hosts in its boundaries several findings which prove the importance of the ancient city and how wealthy and influential its residents were. The north-western double-curtain walls ran along the coastal side as a defensive system in case of attacks from the sea; the plan of the city followed the classic Roman scheme: a
Decumanus Maximus, the paved main street, divided the area into four blocks called
insulae. The most important public buildings have been brought to light along this walkway: the baths fitted with a water heating system and warm water pools, a small basilica and a sanctuary dedicated to the health divinities Asclepius and Salus. Insulae were instead residential quarters, made of square private dwellings densely stratified along narrow streets; the first and third insulae returned the remains of these villas, the most important of which was a large
domus from the imperial period, equipped with a thermal plant and decorated with valuable African-style mosaics, whilst the so-called
hypogeum of the Sybil (an underground room of a Roman villa, subsequently re-used by the first Christian community as a baptistery) and other tombs were found in the fourth insula [
37]. In the 9th century, Lylibaeum was conquered by the Arabs and was named Marsala; in this period the original Roman settlement was abandoned, and the town developed inland, assuming its current extension.
The city of Lilybaeum extended well beyond the boundaries of the current Archaeological Park and many archaeological remains of the past are hidden by the buildings of the modern city of Marsala. The hypogeum of
Crispia salvia represents one of these cases. It is one of the most important monuments in the Hellenistic–Roman necropolis of Lylibaeum discovered outside the perimeter of the Archaeological Park (
Figure 1). The hypogeum is the only known paradigmatic example of a Roman sepulchre in Sicily with rich fresco wall decorations, including scenes alluding to the passing from life to death [
38]. It was in a sector of the original Punic cemetery mostly characterized by returned pit tombs dated to the 4–3rd century B.C. However, the area continued to be used in the Hellenistic period until the early Roman Imperial age in the middle of the 2nd century C.E.
The hypogeum was discovered in 1994 in a heavily stratified district of the modern city, as a fortuitous finding during the excavation of the trenches for a new development of private apartments. This hypogeum is named after
Crispia salvia, a woman aged about 45 when she died after being married for the previous 15 years to
Iulius Demetrius, who commissioned the burial chamber. On a terracotta tile nailed above her coffin, a dedication written in Latin in red letters reports: “
Crispia salvia vixit annos plus minus XLV Uxori dulcissimae Iulius Demetrius qua vixit cum suo marito annos XV libenti animo” (“
Crispia salvia aged more or less 45. To a delightful wife who had gladly spent 15 years with her husband, Iulius Demetrius dedicated this”). The onomastics of the woman reveals her noble origins, as she belonged to two
gentes of considerable importance: the gens
Crispi and the gens
Salvii. The first one is attested around the city of Segesta, the second is recorded in funerary inscriptions elsewhere in Lilybaeum [
38]. The origins of the husband are less clear. Indeed, his name was common on the island, and he could have been a person of high rank (such as a magistrate), a simple Roman citizen, or even a freedman [
39]. The clearest evidence of the family’s social status is found in the typology of the tomb and the richness and complexity of the pictorial decoration which covers the entire surface of its walls.
Differently from the widely extended public catacombs known in Rome and Syracuse [
40], “hypogea” are relatively small burial chambers, built by wealthy private clients to accommodate family members or important people. Following the usual typology, this hypogeum is accessible by a tracheal dromos (entrance), where a few steps dug into the limestone bank lead to a large trapezoidal room about of 25 m
2 (approximately with a max length of 5.7 m, a max width of 4.6 m, and a max height of 1.8 m), located roughly 3 m underground and oriented in NW–SE direction [
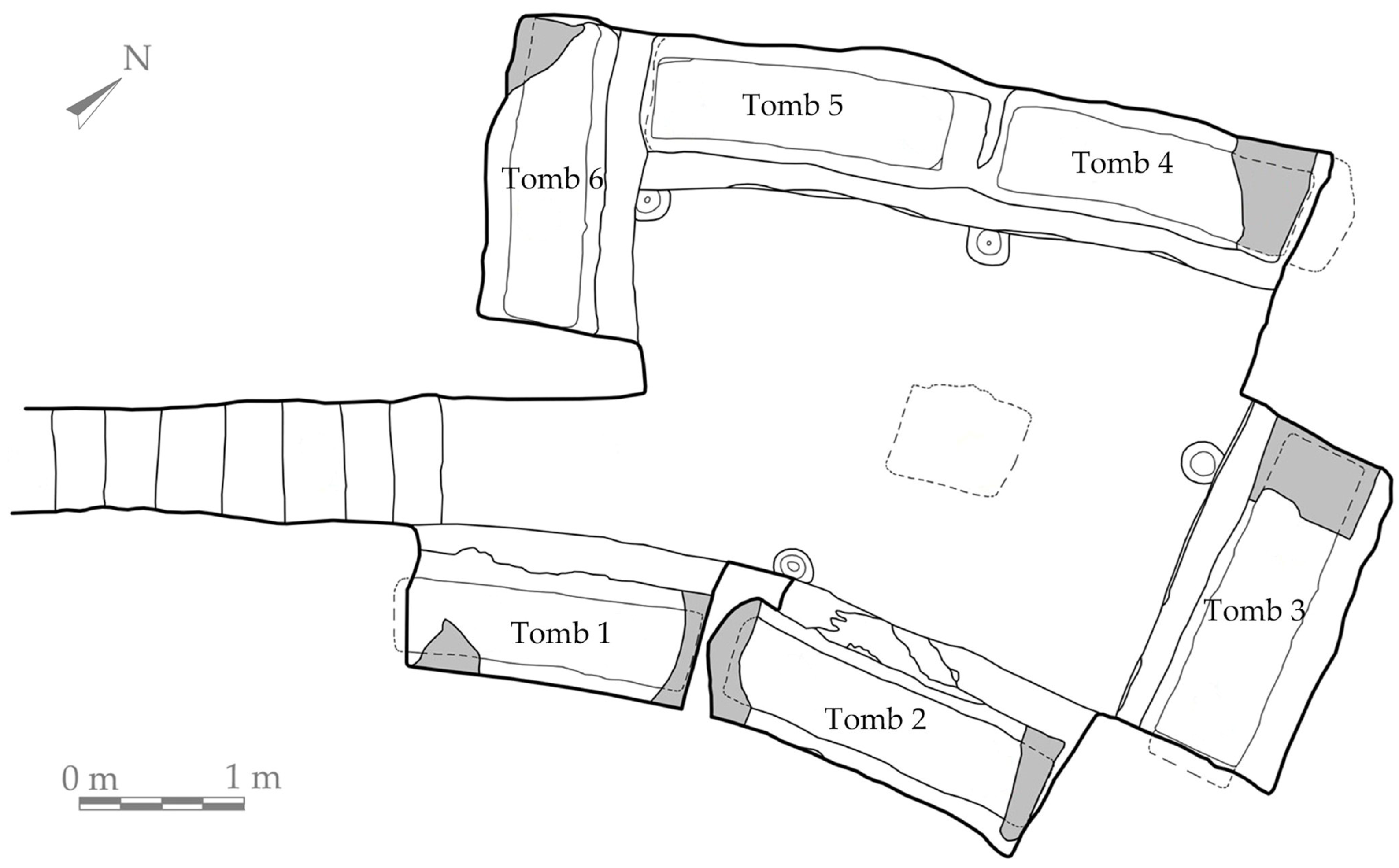
41]. The floor has no pavement, but a binding layer of grout mixed with clay. In the center of the chamber, a significant ditch is visible corresponding to a missing altar, where the burial rites in the honor of the passed away would have been celebrated once a year. This worship usually was focused on carrying sacred meals in memory of the deceased inside the room and sharing with them as proved by four potholes dug next to the tombs, where milk and honey or wine were poured for the people in the coffins. In the hypogeum, there are six tombs along the perimeter, numbered counterclockwise starting from the entrance (
Figure 2). Thanks to the syntax of the Latin inscription and the style of the funerary frescoes, the most ancient tombs (n. 2, 3, 4, and 5) were dated to the mid-2nd century C.E.; these rectangular cases were carved into the rock inside niches. The latter were initially covered by thick clay slab lids, of which some small fragments still remain.
The dedicatory terracotta tile above Tomb 3, in the south-eastern wall, indicates that
Crispia salvia was buried there (it was the only one with a name attributed), whilst Iulius Demetrius was placed in Tomb 4, in the north-eastern corner of the cell. During archaeological research in 2019, the complete cleaning of the tombs revealed two irregularly shaped “pillows”, useful to understand better the original orientation of the inhumated corpses, placed in supine decubitus. Another two sarcophagi (Tombs 1 and 6) to the sides of the entrance were defined by an arched recess (
arcosolium), with no traces of decorations [
39]. However, this typology of burial started to be used from the 4th century C.E. only, so these latter burials are considered as later additions to the hypogeum. This hypothesis has been supported by two details: Tomb 1 has been carved partially outside the original perimeter of the hypogeum, and the two recesses have not been provided with the potholes for drinking. This suggests that the sepulchre was likely used for at least the following two centuries, when Christianity was largely diffuse and pagan rituals were discouraged.
The peculiarity of the
Crispia salvia hypogeum is in its frescoed surfaces, whose depicted items were not frequent in the academic literature (see [
37,
42] for exceptions), and in the highly limited accessibility of the site. The walls were entirely smoothed with a white lime coat on which the pictorial decoration was made (
Figure 3). This consists of a lower red perimeter band, which covers the external quay of the burials, and of figurative scenes, located on the upper vertical surfaces of the chamber.
The frescoed sceneries, many of which pictured for the first time here, served as popular prototypes for the Sicilian paleo-Christian style [
42]. The decorations are characterized by lively polychromies, whose recurring theme is the floral element, providing a clear allusion to a heavenly environment [
40,
43]. The most used colors (apart from the white background) are red, black, green, and ochre yellow. The quality of the color was preserved in mint condition over the centuries. Going in a counterclockwise direction, Tomb 1 has no decorations as mentioned earlier. The south-eastern wall above Tomb 2 bears a fresco with two scenes (
Figure 4). The first shows a funerary sacred meal celebrated by five men drinking glasses of wine around a semi-elliptical table; three of them are sitting in the center, whilst the lateral two are laying on a
stibadium (stall) in front of a
trapeza (altar), where glasses are visible [
37,
43]. Above their head there is a flower garland arranged as a festoon [
44]. The second scene represents a single line of five male characters dancing in front of a woman playing a double flute. The red poppies on the background symbolize the otherworldly Elysium [
44].
In Tomb 3, two alate characters are displayed on the main surface in a synchronized flight, while holding at each end a garland of red flowers arranged in a festoon from which red ribbons fall. This painting is off-center towards the right, because of the presence of clay tile nailed on the other side. Red poppies are evenly covering the background (
Figure 5).
On the side walls of the tomb there are a male and a female peacock in front of each other, surrounded by 10 pomegranates. Both are sitting on a
kalathos (a hamper with flowers or fruit). In one corner above Tomb 4, where Iulius Demetrius was placed, there are three quadrangular recesses where the dining appliances were stored; just below these recesses, there are two garlands on a uniform background of red poppies, very similar to the ones in the catacombs of Vigna Cassia in Syracuse [
45]. On the left side, a bird is getting off a hamper (
Figure 6). Above Tomb 5, two peacocks are looking at each other from the ends of a central wreath, above another basket [
37].
3. Materials and Methods
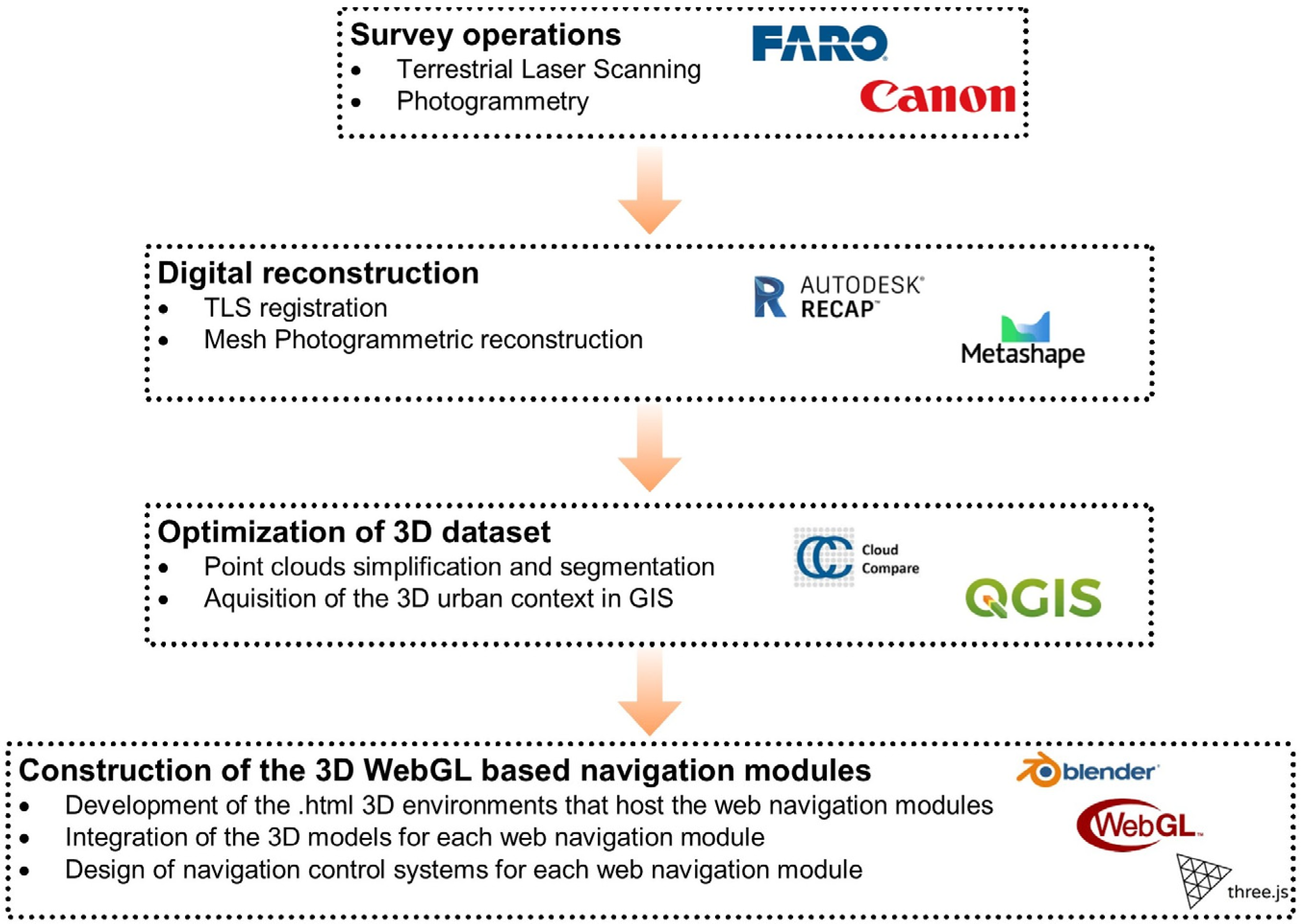
The construction of the web navigation model required several steps which involved different phases (
Figure 7). The first step focused on the survey operations. TLS and a photogrammetric survey were adopted to acquire both geometrical and texture information of the hypogeum site (necessary to build the web navigation experience). The second step regarded the survey data processing to reproduce the environments digitally, based on the registration and matching operation of the TLS scans and the photogrammetric reconstruction of the hypogeum. The next step aimed at the optimization of the 3D dataset (simplification and segmentation operations of the point cloud included), prior to setting the visualization parameters in the web navigation experience. In this phase, cartographic data of Marsala were also used through a WebGIS service (the open-source Geospatial Service of the Sicilian Territorial Information System) for the reconstruction of the 3D volumetric urban context. The last step consisted of the construction of the virtual navigation model, enabling the creation of a proper framework based on WebGL technology (Three.js libraries) inside .html environments, and integrating different combinations of 3D models’ visualizations for each web navigation module.
3.1. The 3D Survey
A complete 3D survey combining TLS and terrestrial photogrammetry was planned. Prior to starting the data acquisition, a preliminary inspection on site was fundamental to match all the areas of interest and to highlight any critical aspects of the work.
The main constraints for the data acquisition were the scarce natural light and ventilation inside the chamber, its reduced height (less than 1.80 m in some parts), the several confined spaces (i.e., the recesses of burials), and the connections among the cave, the staircase, the entrance hall, and the external premises. These constraints have been taken into account during the 3D acquisition, as they influenced the different survey steps.
The poor lighting, which could have impaired the acquisition of the right radiometric component in the data, was solved by using four 50 W LED lamps (500 W eq.) appropriately positioned according to the different survey methods; below the laser scanner in order to prevent any glare and overexposure while scanning, and in front of each wall to be captured during the photogrammetric acquisition.
3.1.1. The Terrestrial Laser Scanning Survey
The TLS survey was arranged to detect all accessible areas which define the path for the exploration of the hypogeum, including indoor and outdoor environments. All assessments have been made in relation to the laser scanner features, the archaeological structures, and the conditions of the site.
The 3D documentation was performed by a FARO Focus 3D S120 phase shift laser scanner (
Figure 8). This device is characterized by a ranging error, defined as the systematic measurement error, of ±2 mm at 10 m and 25 m at 90% and 10% reflectivity, respectively, a range from 0.6 m up to 120 m indoors or outdoors with ambient light and normal incidence to a 90% reflective surface, a measurement speed up to 976,000 points/second, and a vertical and horizontal field of view of 305° and 360°.
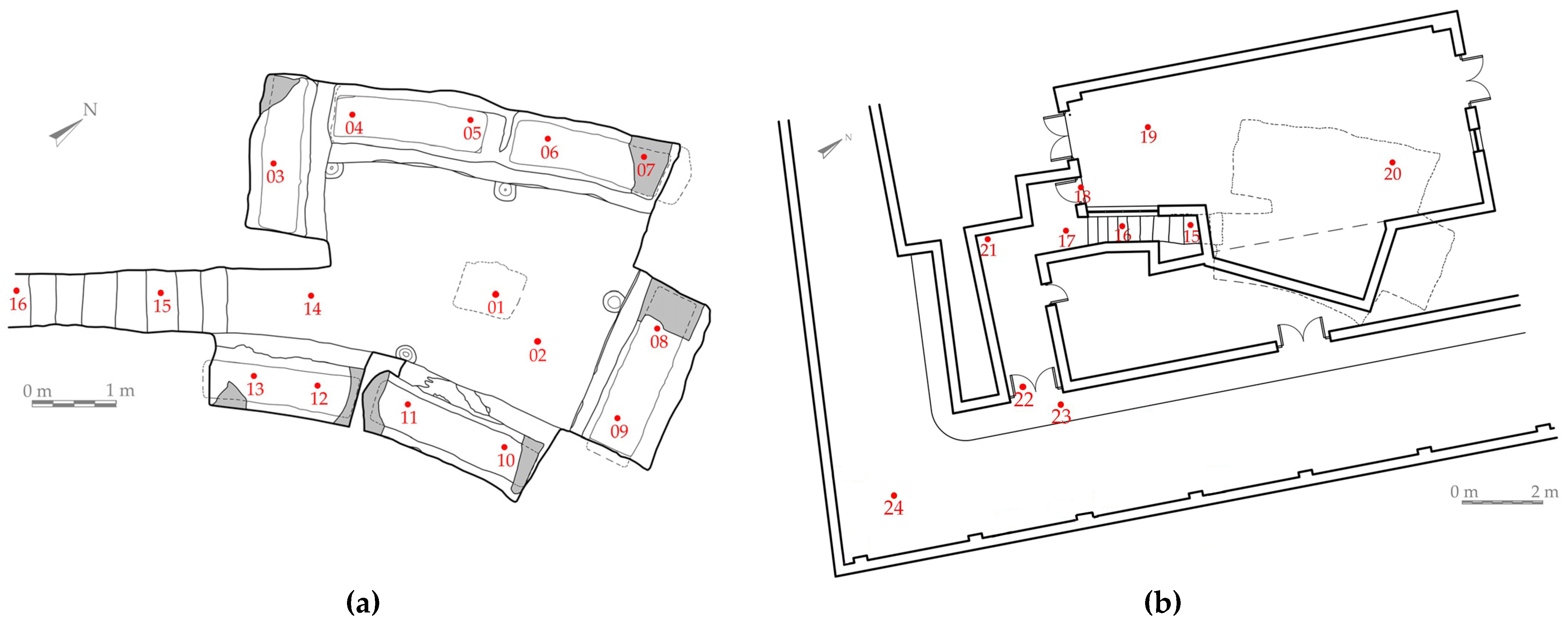
Data acquisition started from the altar area inside the hypogeum, proceeded all around inside the tombs and then outward to the dromos, the stairway, the entrance hall, the inner court, and the external spaces of the building, providing a total of 24 scans (15 indoors and 9 outdoors) (
Figure 9).
The scans of the hypogeum proper were acquired in the following way: the main two in the center of the sepulchre were set to a resolution of ~3 mm at 10 m in order to ensure the best acquisition of the whole frescoed surfaces, whilst the eleven on the perimeter of the hypogeum were used to cover the most inaccessible and darkest parts inside the tombs, with a resolution of ~6 mm at 10 m; the latter settings were applied to the rest of the scans (
Table 1). The settings and the placement of the laser scanner and the order of the scans were designed considering the special environmental conditions of the hypogeum site and were aimed to improve and enhance the data processing phase.
Confined spaces were a problem for covering all of the hypogeum’s surfaces, as they were difficult to reach due to a lack of room to place the laser scanner and many recessed parts that were difficult to reach. Connecting the several parts of the ground floor and the underground site was carried out by prioritizing the order the scans were performed: from the center of the hypogeum to the perimeter, far away to the dromos, and then the entrance hall and the other premises, to prevent a random alignment during the data processing phase.
3.1.2. The Photogrammetric Survey
The dataset obtained by TLS acquisitions was enough to digitize the geometries of the burial chamber but not sufficient to acquire a good level of texture information necessary to reproduce the Roman frescoes. At this stage, performing a photogrammetric acquisition of the burial chamber was made indispensable. For this purpose, a Canon EOS 550D Single Reflex Camera with a resolution of 18 Mpx was adopted. The camera was placed considering a perimetral path in three different strips at a height of approximately 50 cm to a height of 1 m from the ground. To achieve complete surface coverage, for every strip a different camera tilting was chosen. Along the strip, the distance between continuous camera positions was kept constant, imposing an overlap of at least 80%. The camera-to-object distance was about 3.5 m to the perimetral delimitation of the tombs, obtaining an average Ground Sampling Distance (GSD) of 0.7 mm. This photogrammetric block was integrated with several convergent images from the corner of the hypogeum to cover the hidden surfaces of the tombs. A total of 222 acquisitions were necessary to acquire the whole surface.
During the photogrammetric acquisition, the lamps were positioned in front of the wall to survey, considering the four walls of the room (
Figure 10). In this way, the photos were acquired with uniform lighting. For each wall, a set of scale bars were placed with an even equal distribution along the base of the tombs, to scale the model during the photogrammetric process. This approach, already used in other applications [
46], guaranteed a high metric accuracy of the photogrammetric survey.
3.2. The 3D Reconstruction
The TLS data processing has been managed through Autodesk ReCap 2022 software. The scans were imported following the chronological order of acquisition. The geometry of the site was reconstructed starting from the first scan, inside the burial chamber, considered as the main reference for further acquisitions. Once this initial batch was obtained, the other scans were added following the acquisition sequence; considering first the ones acquired inside the hypogeum, then the ones between the dromos and the upper entrance hall, in order to link the hypogeum to the ground floor level of the upper building, and finally all the remaining ones allowed the connections among the entrance hall, the internal courtyard, and the external premises.
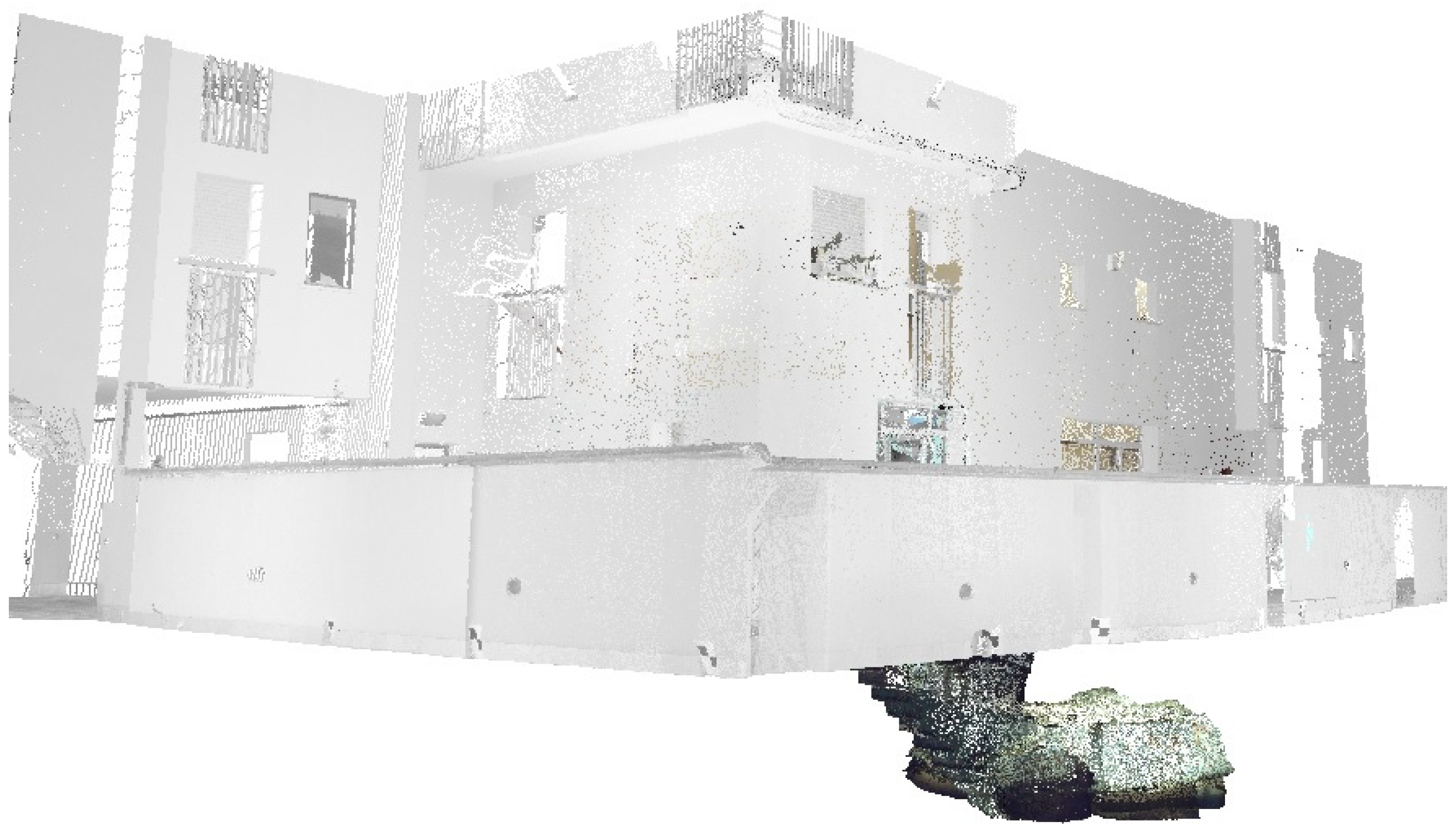
In order to optimize the acquired dataset for the processing phase, the redundant geometrical information was segmented and deleted from the lower-resolution scans. After this operation, all the 24 scans were merged into a single cluster, made by more than 437 million points; this point cloud had a resolution of about 3 mm on average. For a first optimization of this dataset, the point cloud was clustered (deleting the information over the boundaries of interest), cropped to the first level of the building, and resampled to obtain a uniform point cloud resolution of about 6 mm; in this way, the dataset was reduced to about 148 million points (
Figure 11).
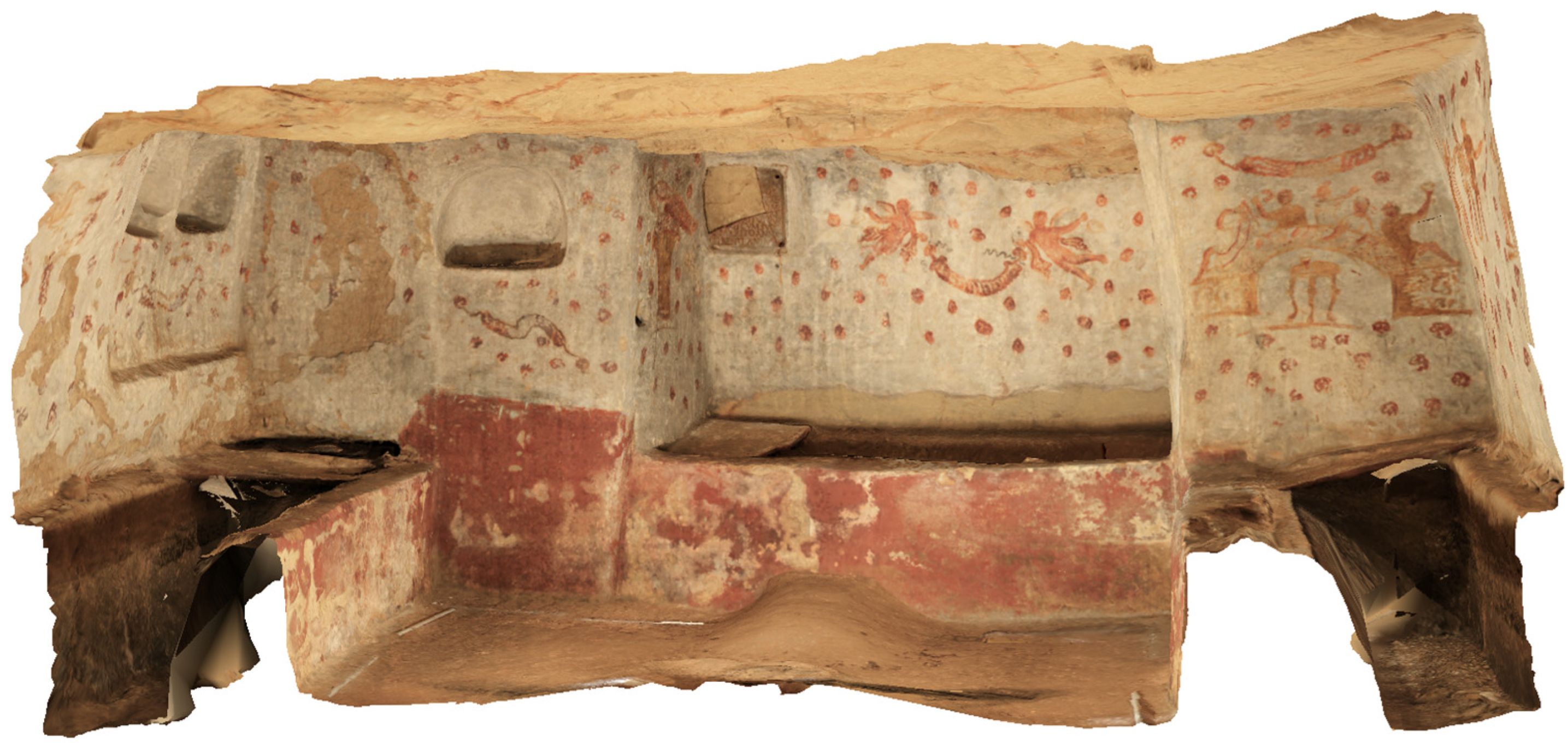
The photogrammetric processing was carried out using Agisoft Metashape ver. 2.0.2 software. The images were oriented by applying the standard automatic SfM approach, calculating the camera interior and image exterior orientation parameters. Twenty-four distances were used to calculate the image orientation; twelve to scale the photogrammetric block and another twelve to check the accuracy. An accuracy of less than a millimeter was achieved for image orientation. A point cloud was calculated using the dense stereo matching algorithms of Agisoft Metashape; this point cloud was used to obtain a textured mesh of the chamber. Since it was not necessary to have extremely detailed data, the point cloud was calculated by setting the quality parameter of Metashape as low; in this way, a point cloud of about 7 million points was obtained. At the same time, the number of polygons of the 3D mesh was limited to approximately one hundred and thirty thousand polygons. This operation was necessary to correctly load the 3D models on the web with the implementation of WebGL JavaScript modules. The texture was computed instead with a high resolution (4096 pixels × 4096 pixels), obtaining a high-detail textured mesh of the hypogeum (
Figure 12). The textured mesh was exported in .obj format and was registered by a cloud-to-mesh alignment to the laser scanner point cloud using CloudCompare ver. 2.12.4 open-source software. In this way, the photogrammetric dataset was also included in the global reference system.
4. The 3D Web Navigation System
The 3D web navigation system regarded the integration of the different datasets (considering the connections between the hypogeum and the residential building over it), the editing of the 3D reconstruction to allow web browsing navigation, and the construction of the 3D web interface.
The 3D reconstruction allowed the acquisition of a digitized 3D dataset which fully recovered the necessary geometrical and high-detail texture information for the visualization on the web. The 3D point cloud obtained from the TLS acquisitions recovered the environments of the chamber, the connections between the ground floor and the underground level, and the entrance hall of the building. At the same time, the photogrammetric reconstruction allowed the acquisition of a 3D textured mesh with a high level of detail. The digitized material provided by 3D reconstruction phases was, then, simplified and adapted to be uploaded for web visualization. Indeed, the web browsing experience could be guaranteed by limiting the size of 3D models to visualize, avoiding web browser crashes during the web navigation. At the same time, if the geometric information is too simplified, there is a risk of the loss of the perception of the environments during 3D navigation. Hence, it is necessary to find a balance between the quality of web browsing and the quality of visualization.
Considering the mesh generated by the photogrammetric reconstruction, the output of Metashape preserves the necessary geometric information which, combined with the highly detailed texture, offers a realistic 3D representation with a limited size of the 3D model. However, considering the 3D TLS point cloud, it needed further simplification processes and needed to be segmented accordingly into each web navigation module. In particular, all segmented point clouds were optimized considering a size limitation of 100 MB for each navigation module. Starting from this limitation, the main point cloud was simplified using Cloud Compare software, combining several steps of noise filtering and subsampling operations. The overall environment represented by the main point cloud was segmented, eliminating the hypogeum parts (just represented by the 3D mesh) and transforming the indoor entrance environment into 3D mesh. In this way, the amount of TLS data was reduced, optimizing the visualization. The remaining environment was divided into two parts: the outdoor environment and the hypogeum entrance. Then, the level of simplification and the parts to load in the web visualization were selected for each web navigation module, balancing the level of simplification with the scale of visualization. The more 3D models (point clouds and meshes) that are visualized, the more simplified the point cloud parts will be.
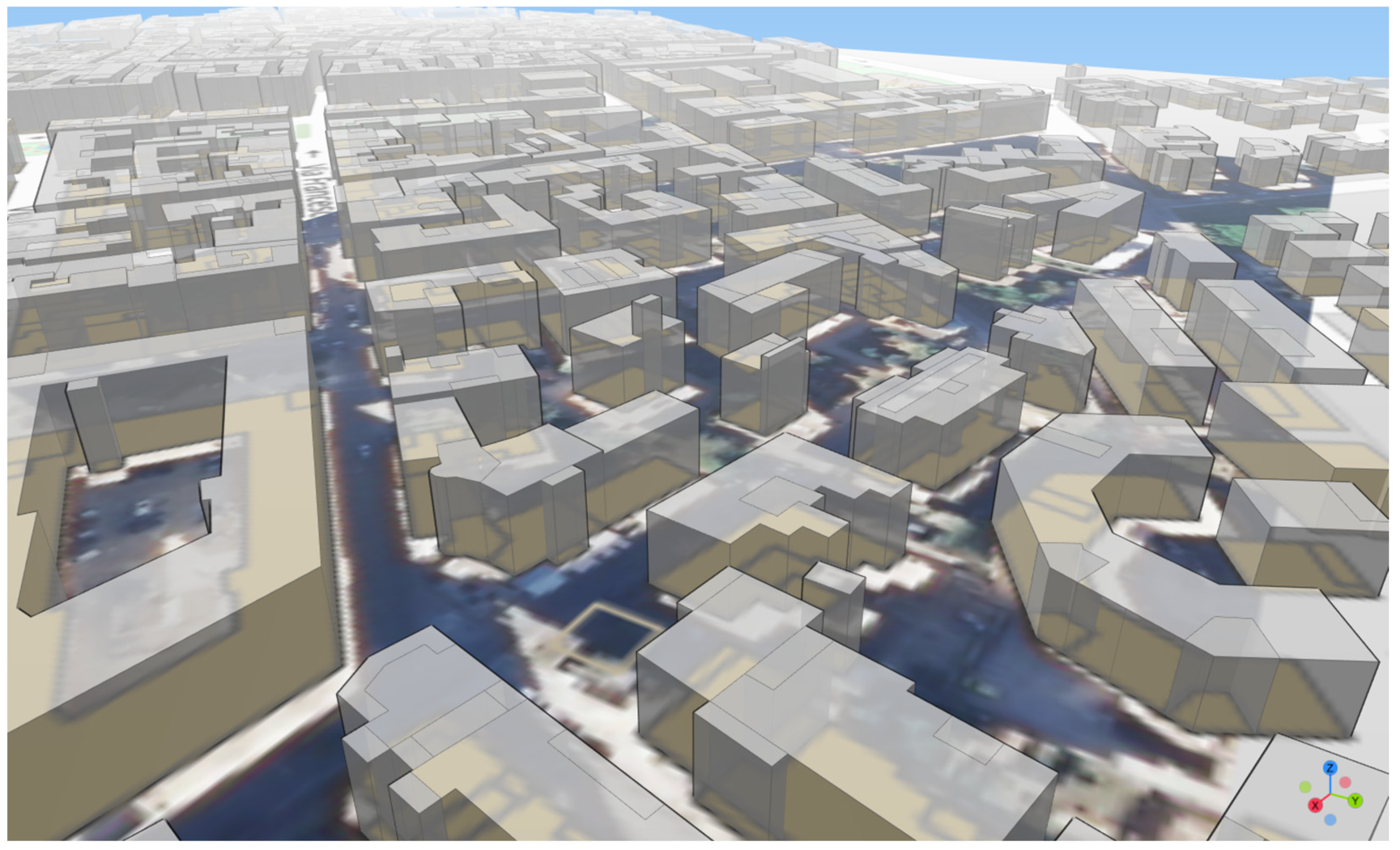
In the general visualization, the 3D dataset was enriched with the volumetric visualization of the built-up environment around the area of interest. This contextualization was important considering that the hypogeum site is located under the modern surroundings of the city of Marsala. Only open-source datasets have been used in this operation. The urban milieu of the city of Marsala was obtained using the cartography (vectorial dataset) and the orthophoto (raster dataset) freely shared by the open-source Geospatial Service of the Sicilian Territorial Information System (
https://www.sitr.regione.sicilia.it/, accessed on 15 January 2023). The 3D shapes of the buildings were obtained by extruding automatically the height metadata information inside the vectorial dataset in QGIS open-source software using QGIS2threejs Exporter (
Figure 13). The 3D models which compose the urban context were then loaded in the web navigation system.
The Web Navigation Structure
As affirmed earlier, the visualization of the entire dataset in a single .html page was impossible, due to the huge number of geometries to consider. For this reason, it was necessary to design different web navigation modules, considering different levels of detail and different geometric content to visualize inside. Each navigation module can implement different combinations of 3D models with different levels of information or scales of visualization; in particular, we have defined two scales of visualization, an urban scale for an overview of the context and an architectonic scale for detailed visualization and model exploration.
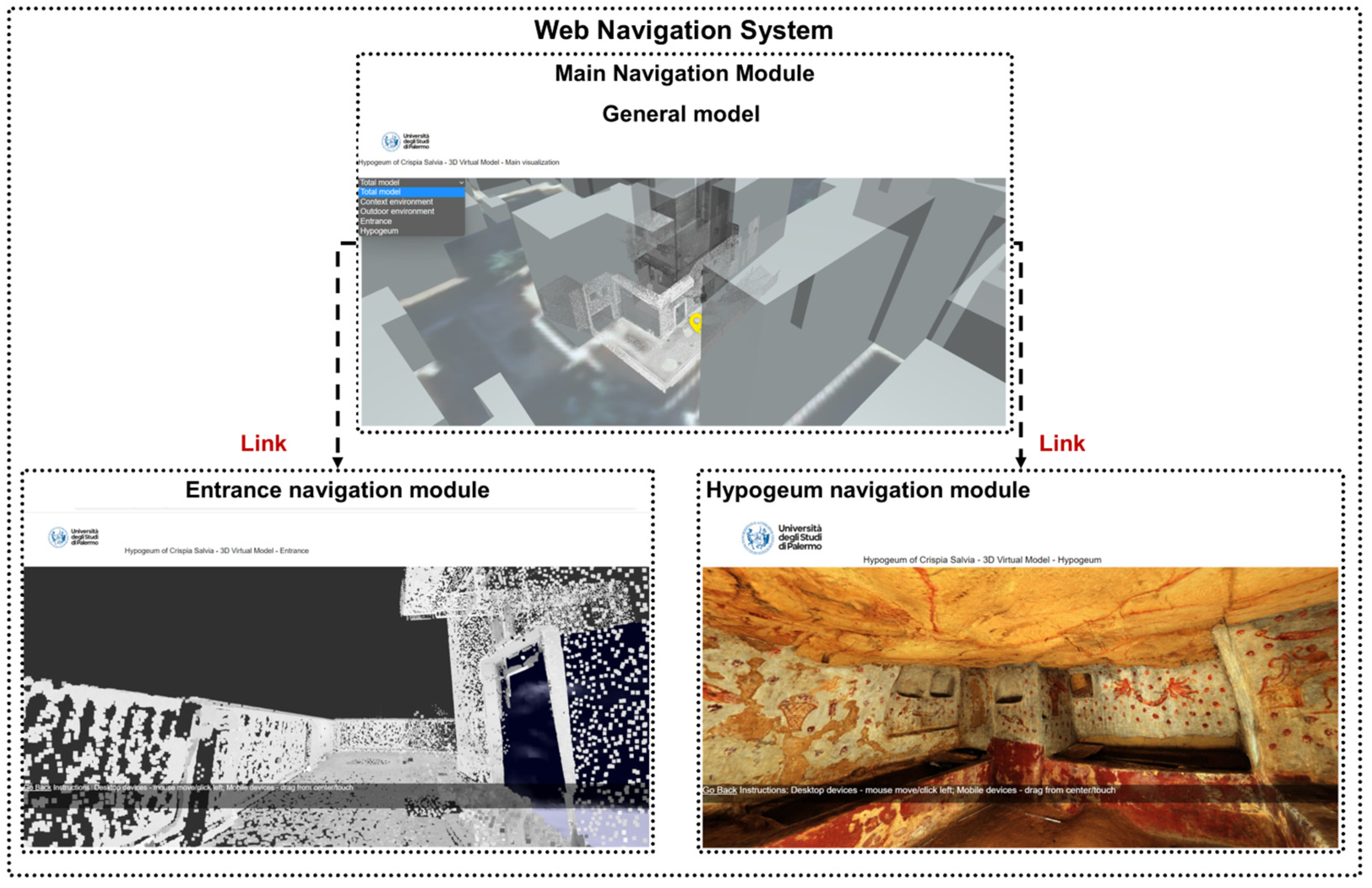
Taking into account the complexity of the environment to visualize on the web, the web navigation system was composed of three web navigation modules (
Figure 14):
General model, at the urban scale, which shows the localization of the hypogeum in relation to the building located over it and the surrounding urban environment. It allows users to navigate around the site with an orbit control navigation.
Entrance navigation, at an architectonic scale, which shows the indoor and outdoor environments defining the entrance to the hypogeum. It allows users to walk inside the environment with a first-person control navigation.
Hypogeum navigation, at an architectonic scale, which shows the indoor environment of the burial chamber. It allows users to walk inside the environment with a first-person control navigation.
Figure 14.
The structure of the Web Navigation System.
Figure 14.
The structure of the Web Navigation System.
The 3D models which composed the navigation modules were imported into Blender open-source software. This step was necessary to combine point clouds, 3D meshes, the orthophoto, and 3D shapes of buildings correctly in different combinations, also applying small modifications to 3D point clouds and meshes.
The Main Navigation Module was comprehensive of the 3D model of the urban area around the site (orthophoto and 3D shapes of the buildings), a low-detail 3D point cloud of the indoor and outdoor environments of the entrance, and the 3D mesh of the hypogeum. The Entrance Navigation Module combined a medium-detail 3D point cloud of the outdoor entrance environment (the courtyard of the residential building over the hypogeum) and a 3D mesh of the indoor entrance environment. The Hypogeum Navigation Module, which represented the main visualization of the platform, included the 3D highly detailed textured mesh of the burial chamber. The composition of every navigation module is synthesized in
Table 2.
The last step of the process was the integration of every environment in the Web navigation models based on WebGL. In this experimentation, Three.js JavaScript libraries were implemented in each .html page (one for each navigation model). For every navigation model a proper control navigating system was elaborated to satisfy the needs of web virtual explorers on desktop and mobile devices. In the main navigation, an orbit control system was implemented, to allow a simple navigation around the hypogeum. Considering the complexity of the environments, in the main navigation module a switcher was integrated to enable users to visualize different combinations of datasets. Into the same page, two popup links connected with the hypogeum and entrance navigation models were integrated.
The entrance navigation module and the hypogeum navigation modules were conceived with a first-person navigation system, to offer users a realistic walking experience during web exploration. The virtual digitization of a first-person navigation experience was developed by integrating different Three.js JavaScript blocks. In particular, a gravity-based environment was employed using an Octree.js module. A system of invisible boundaries was created, to allow visitors free movement in the navigation module but preventing navigation outside the environment. The system of boundaries was integrated in the 3D environment using Blender open-source software and was then loaded into the WebGL context.
All the web navigation modules were developed using JavaScript, .html, and CSS script languages and implementing open-source libraries available on the web.
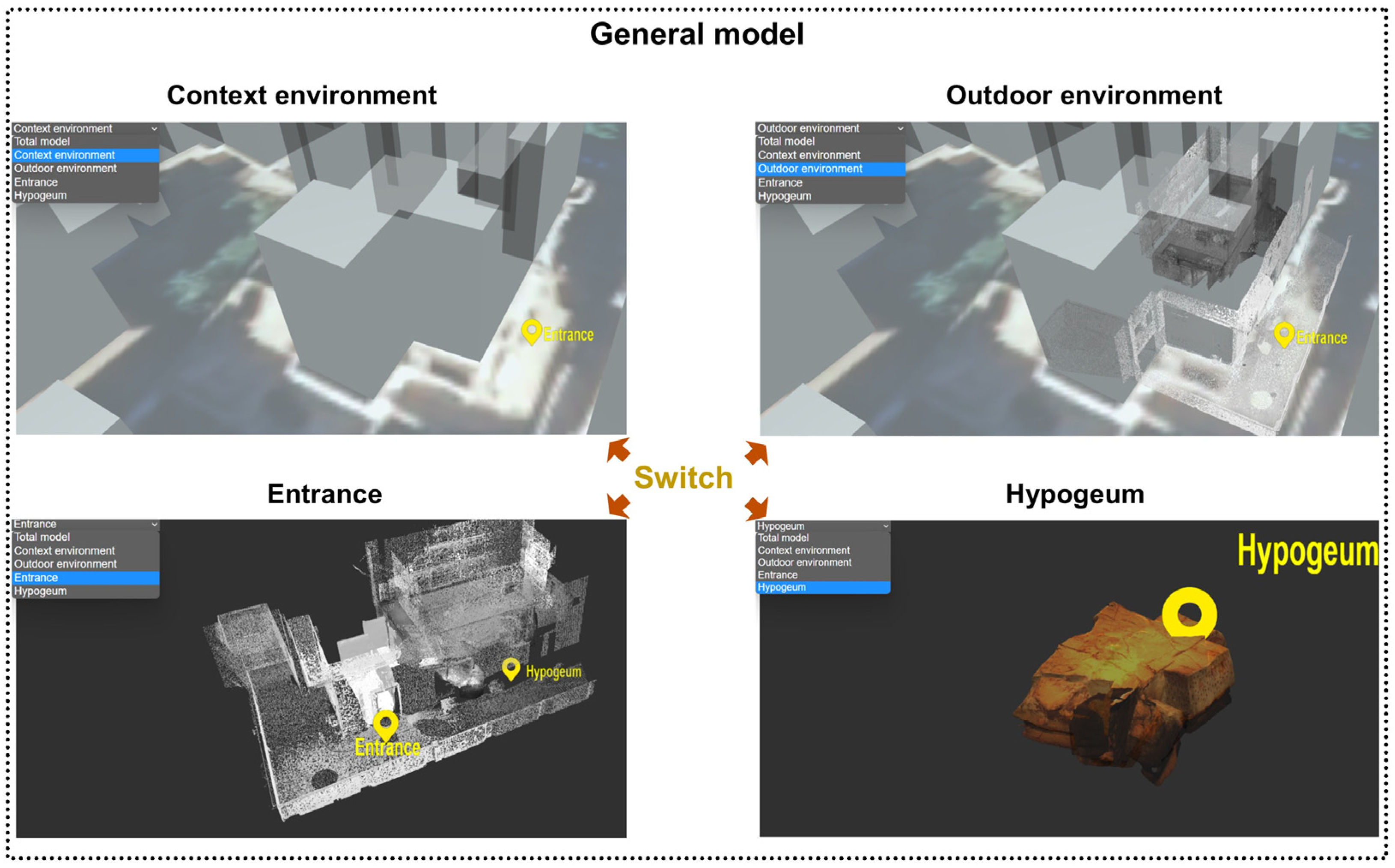
The web navigation system assembled the different navigation modules in a common structure. The Main Navigation Module represents the index page, where the site inside its urban context is visualized. This visualization allows switching between different combinations of visualizations (general model, context environment, outdoor environment, entrance, hypogeum) (
Figure 15). The Main Navigation Module is connected to the Entrance Navigation Module and the Hypogeum Navigation module by a system of popup links.
Once the structure was set up, the web navigation system was implemented in a server of the University of Palermo to test its functionality. In the initial phase, tests were carried out using only internal access from the university network; subsequently, access was periodically opened to external users who could freely connect to the system via links or QR codes. This initial operational phase made it possible to verify the uploading speed of the 3D models with different types of devices (PCs, tablets, smartphones) and with connections from different providers. In this way, several aspects of the system (such as the navigation system) were optimized and improved.
The system was realized on an experimental basis as a research activity of the Department of Engineering of the University of Palermo and is currently still stored in the University’s servers and is only made accessible from the outside for the test phase or upon specific request. However, the system was designed to be made available to tourists visiting the Archaeological Park of Lilibeo-Marsala. In particular, through the installation of QR codes inside the Archaeological Park Museum, visitors, in addition to viewing the remains from the site (i.e., burial artefacts), can have a virtual site visit experience using their own device (tablet or smartphone) with no need for installing apps. However, this further development requires specific agreements with the Archaeological Park, which have not yet been stipulated.
5. Discussion
The recent strategies in VR simulations can be useful and successfully applied to the fruition and the enjoyment of CH sites whenever they need to be protected from anthropic activities because of their vulnerability and fragility. These virtual contents help at the same time to promote little-known sites and share awareness and knowledge about them for any dissemination purposes or CH management requirements. The computer-simulated environments are usually based on reconstructions which replicate the real scenes acquired with geomatic techniques.
In this research, the 3D scene was a rigorous digital model obtained from integrated TLS and photogrammetric surveys, whose acquisitions were accurately planned and performed in order to render all the geometric and textural information of the burial chamber. This reconstruction was then edited and optimized to be uploaded in the web navigation system, trying, on one hand, to find a reasonable balance between the necessary level of detail of the model and the limitations on the size of the textures and geometries to be imported and, on the other, to preserve the realistic web visualization and the quality of the web browsing experience.
The distribution of the web platform in three modules improved the browsing capabilities, enabling at the same time the possibility for users to use automatic navigation at urban and architectonic scales and a scene-based search and retrieval. Indeed, the 3D environment keeps the geometrical and textural information acquired from the survey unaltered and the mutual relationships consistent, facilitating the users’ spatial perception.
The Three.js open-source libraries were necessary to build up the environment and the navigation system, integrating different existing JavaScript modules. Each web navigation module contains various combinations of geospatial datasets (3D models, 3D point clouds, textured meshes) according to the level of detail of the visualization. Moreover, the use of separate modules reduces the loading time of each page.
The advantages of adopting open-source solutions were manifold: first, they are smart and cost-free solutions for both developers and final users. Indeed, developers do not have to resort to expensive and limited authoring tools whilst they can find freely accessible libraries which integrate in-built customizable interfaces, plugins, and tools according to their needs. Users can directly explore the platform through web browsers, avoiding any programming skill requirements and software installation. Non-domain experts can fully experience the cultural asset and its historical, archaeological, and artistic characteristics thanks to native tools which can be intuitively customized. Plus, open-source environments are ideal for CH management, as the information archived in those systems has been made available to be searched, shared, retrieved, and updated at all times. This encourages collaboration among scholars of different disciplines (from archaeology to engineering) for any CH management purposes, i.e., risk assessments due to anthropic activities on site.
Despite those advantages, it must be noted that virtual navigation cannot replace a physical visit to the place; it is an undisputable substitute helping to preserve vulnerable sites from a huge audience of visitors which can compromise their fragile equilibrium and a useful flywheel for arousing interest and curiosity in the case of little-known sites (like this case study).
Albeit these resources are currently limited by the size of the contents to be uploaded, in the near future improved internet connections will allow large optimized models and further extensions to their fruition, for a totally immersive user experience.
6. Conclusions
The web navigation system developed in this work allows the virtual exploration on the web of an archaeological site with limited real accessibility. It allows visualization of different kinds of datasets (point clouds, 3D models, textured meshes) using web browsers directly, with no software installation required.
The results obtained in this research show that WebGL open-source libraries allow visualization on the web of different kinds of datasets provided by survey operations, including textured meshes, models, and 3D point clouds.
In the field of VR applications for the dissemination of CH knowledge, the use of web navigation systems based on WebGL open-source JavaScript libraries seems to be one of the best solutions to apply. In fact, as affirmed before, the reduced cost of these technologies and the simple web accessibility from any kind of device led specialists to focus their interest on this kind of solution. Recent works in this field underlined the strengths of this approach, which allow multitemporal virtual web explorations [
47], metaverse integration of digital twins [
48], and storytelling integration for educational purposes [
49].
On the other hand, the limited size of geometries and textures to be loaded (in the same .html environment) now represents the main challenge for a massive diffusion of these applications. In fact, it is necessary to divide the virtual environment into modules and connect the visualizations through popup links inside the view. The two scales of visualization present in the platform integrate the 3D geometrical information necessary for the web exploration of the archaeological site. In the future, the system could implement real-time monitoring information provided by a network of sensors installed in situ, to control the humidity and temperature levels of the chamber. The integration of JSON modules into the JavaScript structure will connect a popup web visualization with the real-time sensor acquisitions.
These solutions will implement Internet of Things (IoT) technologies to connect the digital model visualized in the web navigation platform with the real one in real time. In this scenario, the integration of low-cost real-time sensor acquisition can be useful for fruition and conservation purposes to analyze and manage monuments and archaeological sites. Furthermore, the web navigation platform could be implemented in the future in VR and AR applications with the adoption of software like Twinmotion and Unreal Engine to explore further user experience solutions.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}