1. Introduction
Pipelines are crucial elements in many engineering systems and are widely used to transport water [
1,
2]. However, the efficiency of these systems can be compromised by issues such as water leaks [
3,
4]. When undetected or neglected, these leaks can lead to significant wastage of water, posing both environmental and economic challenges across the world [
5,
6,
7]. In 2019, the European Environmental Agency reported that water scarcity impacted 29% of the EU territory for at least one season [
8]. Furthermore, it is estimated that about 23% of drinking water in Europe is lost on average [
9]. Meanwhile, in Brazil, the average water loss is around 38%, with eight states experiencing even more alarming losses exceeding 50%, such as the Roraima state, in which the loss is about 75% [
10].
The modelling of wave propagation in buried water pipes is particularly important for the water industry, as they search for ways to improve leak detection technology [
11,
12,
13]. In buried plastic water distribution pipes, leak noise propagates as a predominantly fluid-borne (
s = 1) wave [
14,
15]. This is an axisymmetric (
n = 0) wave, where the acoustic pressure of the water is strongly coupled to the vibrations of the pipe wall [
16]. The wave involves a large radial motion of the pipe wall and an axial plane wave motion of the water. At frequencies much lower than the ring frequency of the pipe [
15], the other axisymmetric structural-acoustic wave is the (s = 2) wave, which is a predominantly structure-borne wave. However, this wave tends not to be strongly excited by a leak, which generates an oscillating pressure inside the pipe due to turbulence as the water escapes from the pipe. Thus, the focus of this paper is the predominantly fluid-borne wave, a graphical description of which can be found in a webinar by the International Water Association Water Loss Specialist Group [
17].
The detection and localization of water leaks via vibro-acoustic methods, such as acoustic correlators [
18], rely primarily on the time delay estimation technique [
19,
20], which depends heavily on the way in which leak noise propagates. To determine the way in which this is affected by the properties of the pipe and the surrounding medium, a model is needed. Modelling wave propagation in buried plastic pipes is more challenging than for metal pipes because of the high degree of dynamic coupling between the water, the plastic pipe wall, and the surrounding soil. These effects need to be appropriately modelled to ensure that accurate predictions can be made of the speed and attenuation of leak noise propagation. Although there is water–pipe–soil coupling in metal pipes, in general, it is much less than for a plastic pipe, due to the much higher hoop stiffness of metal pipes used in water distribution systems. Much research on wave propagation in fluid-filled pipes has been carried out hitherto. Fuller and Fahy [
21] determined the propagation characteristics of axisymmetric waves and the dispersion curves of thin-walled pipes in vacuo filled with ideal fluid using the Donnel–Mushtari shell theory. The authors also investigated how the vibrational energy in the pipe wall and the fluid within the pipe changes with frequency. In 1994, Pinnington and Briscoe [
14] determined approximate analytical expressions for the two wavenumbers (s = 1, 2) for an in vacuo fluid-filled pipe. Unlike previous work, their analysis was confined to frequencies well below the ring frequency of the pipe and was the basis for the later work by researchers on leak detection in water-filled plastic pipes. Xu and Zhang [
22] studied the vibrational energy flow input from an external force as well as the transmission along the shell. The authors found that the input power flow, as well as the power flow transmitted along the shell, depends highly upon the characteristics of the waveforms travelling in the pipe wall. Sinha et al. [
23] investigated the axisymmetric motion of submerged fluid-filled pipes and determined which modes leak energy into the surrounding fluid. Pan et al. [
24] studied axisymmetric acoustic wave propagation in a fluid-filled pipe with arbitrary thickness both experimentally and numerically. A few years later, Prek [
25] experimentally investigated a frequency domain method for the determination of wave propagation characteristics in fluid-filled viscoelastic pipes, using different pipe wall materials. The authors carried out complex wavenumber estimation using hydrophones.
Some researchers have also focused on the wave characteristics of fluid-filled pipes buried in soil. Long et al. [
26] studied the axisymmetric wave modes propagating in buried iron fluid-filled pipes, predicting the corresponding phase velocity. Further, Long et al. [
27] studied the attenuation of some waves that propagate in buried iron water pipes. Deng and Yang [
28] adopted the Flügge shell theory to model a pipe and the Winkler model for the surrounding soil. The authors studied the effects of wall thickness, the elastic properties of the soil, and the fluid velocity variations. Leinov et al. [
29] conducted some laboratory tests involving the propagation of guided waves in a carbon steel pipe buried in sand. The authors investigated the attenuation properties of the waves for various sand conditions including loose, compacted, mechanically compacted, water-saturated, and drained.
Building on the work of Pinnington and Briscoe [
14,
15], Muggleton et al. [
16] developed an analytical model to predict both the wave speed and attenuation of a buried water-filled plastic pipe. The soil was treated as a fluid supporting two different waves, each of which exerted normal dynamic pressure on the pipe wall. Although the shear coupling of the pipe to the surrounding soil was not properly accounted for, the theoretical and experimental results showed good agreement at low frequencies. The soil properties were then modelled more effectively in the subsequent work of Muggleton and Yan [
30], in which the soil was coupled to the pipe in the radial direction but not in the axial direction. In this case, there is a lubricated contact between the pipe wall and the surrounding soil. The authors derived wavenumbers for the two coupled axisymmetric waves (
s = 1 and
s = 2) and showed that the shear modulus of the soil is an important parameter, influencing the speed of the predominantly fluid-borne wave. A couple of years later, Yan and Zhang [
31] studied the low-frequency acoustic characteristics of propagation and attenuation of the (
s = 1 and
s = 2) waves in immersed pipes conveying fluid. They investigated the influence of material properties and the effects of shell thickness/radius ratio as well as the density of the contained fluid.
In 2018, Brennan et al. [
32] compared the analytical model to predict the wavenumber of the
s = 1 under a lubricated contact between the pipe wall and the soil, with a finite element model of the water–pipe–soil system, and some experimental results from different test sites. The authors validated the conclusions found in [
30] concerning the importance of the shear modulus of the soil on the speed of the predominantly fluid-borne wave. Gao et al. [
33] proposed a more complete model to predict the relationships for the predominantly fluid-borne wave. In this model, the pipe is connected to the soil both radially and axially with perfect bonding at the pipe–soil interface. It was found that the surrounding medium effectively adds mass to the pipe wall, whereas the shear properties of the soil effectively add stiffness. The model described in [
33] was further adapted by Liu et al. [
34] to investigate vibro-acoustic propagation in buried gas pipes. They proposed an effective radiation coefficient to measure the radiation of the gas-dominated and shell-dominated waves. Wang et al. [
35] investigated the wave characteristics of buried water pipes considering the viscosity and fluid flow using a model derived from Love’s thin shell theory. Investigations were carried out by analyzing the effect of different types of soil and pipes and showed that a viscous fluid causes greater wave attenuation compared to an ideal fluid.
For the purposes of studying buried water plastic pipes in the context of water leak detection, the model developed in [
33] is considered to be the most complete. This paper builds on the work described in these articles. The aim is to present a comprehensive investigation into the physical mechanisms governing leak noise propagation. To achieve this, and especially to determine the role of the interface between the pipe and the surrounding medium, the model from [
33] is reformulated in terms of the wave dynamic stiffnesses, namely the pipe, the water, and the surrounding medium. It is believed that such an investigation, which assimilates much of the previous work in a convenient and physically interpretable form, has not been carried out before. At the core of the model is the wavenumber of the predominantly fluid-borne wave, which is written in terms of the wave dynamic stiffnesses. To validate the model, some experimental results are presented on the measurement of the real and imaginary parts of the wavenumber from two sites in which a plastic water pipe is buried in sandy and clay soil, respectively. In both cases, the pipe vibration is generated by a leak.
The paper is organised as follows. Following the introduction, in
Section 2, the objectives of the paper are defined, as are the assumptions made in the derivation of the wavenumber for the predominantly fluid-borne wave.
Section 3 describes the derivation of the wavenumber as a function of wave dynamic stiffness matrices of the component parts of the system. Some experimental work to validate the wave dynamic stiffness approach is carried out in
Section 4. The dynamic stiffnesses of the component parts are presented for three types of surrounding medium in
Section 5 and their physical significance is discussed. The influences of the various parts of the system on the propagation characteristics of the predominantly fluid-borne wave are discussed in
Section 6, and some conclusions are given in
Section 7. There is also an Appendix, which shows how the lubricated interface between the pipe and soil can be described using the proposed model.
2. Problem Statement
The water-filled pipe surrounded by an external medium of interest is shown in
Figure 1a. The external medium can be either water or soil. The pipe has a mean radius
a and wall thickness
h.
Of interest in this paper is the way in which the pipe material and its geometry, along with the soil properties, affect noise propagation from a leak to a measurement point. Of particular interest is the effect of the axial coupling between the pipe and its surrounding medium and how this influences the radiation of acoustic leakage energy into the surrounding medium. To achieve this, an analytical model of the wavenumber is required, and in this paper, this is derived as a function of the wave dynamic stiffnesses of the component parts of the system, i.e., the water in the pipe, the pipe wall, and the surrounding medium. By focusing on wave dynamic stiffnesses, it is possible to identify and assess the specific contribution of each part. Wave dynamic stiffness is similar in concept to wave impedance described by Fahy and Gardonio [
36], but rather than using the variables of force (or pressure) and velocity, displacement is used instead of velocity, as this is more convenient for the model of the pipe system since the displacement of the pipe wall is directly proportional to the acoustic pressure. The result is a more compact and elegant model with less complicated algebraic expressions. It essentially involves a pressure that is harmonic in both space and time being applied to a structure or a fluid. For an arbitrary one-dimensional structure in the
x direction, which has a wavenumber
k, this could be
, where
is the circular frequency and
The response is then described by
, since the structure/fluid is considered to be linear. The wave dynamic stiffness is defined as the ratio
i.e., it is a complex quantity that is dependent on both the frequency and wavenumber. The real part of the wave dynamic stiffness is related to the stiffness or inertial properties of the system and the imaginary part of the wave dynamic stiffness is related to energy dissipation.
The wavenumber of the predominantly fluid-borne wave is the key quantity that captures the way in which the leak noise propagates in the pipe, and is derived in the following section. The following simplifying assumptions are made:
The pipe and surrounding medium are of infinite extent in the axial direction, and the surrounding medium is of infinite extent in the radial direction;
The predominantly fluid-dominated axisymmetric wave is the only wave propagating in the pipe and is wholly responsible for the propagation of leak noise;
The frequency range of interest is well below the pipe ring frequency, so that bending in the pipe wall is neglected. The ring frequency is the resonance frequency where the circumference is equal to one wavelength of a compressional wave in the pipe wall;
The frequency range of interest is such that an acoustic wavelength of water is much greater than the diameter of the pipe.
In such a system, the frequency response function (FRF) between the acoustic pressure at an arbitrary position in the pipe and the acoustic pressure at another position
d metres away is given by
which simply represents a decaying, predominantly fluid-borne, propagating wave. The wavenumber is complex, because the amplitude of the wave decreases as it propagates along the pipe. To clarify how the wavenumber is related to the physical behaviour of the wave, it is useful to rewrite Equation (1a) as [
20]
where
is a measure of the loss as the wave propagates along the pipe wall and
is the speed at which it propagates, and
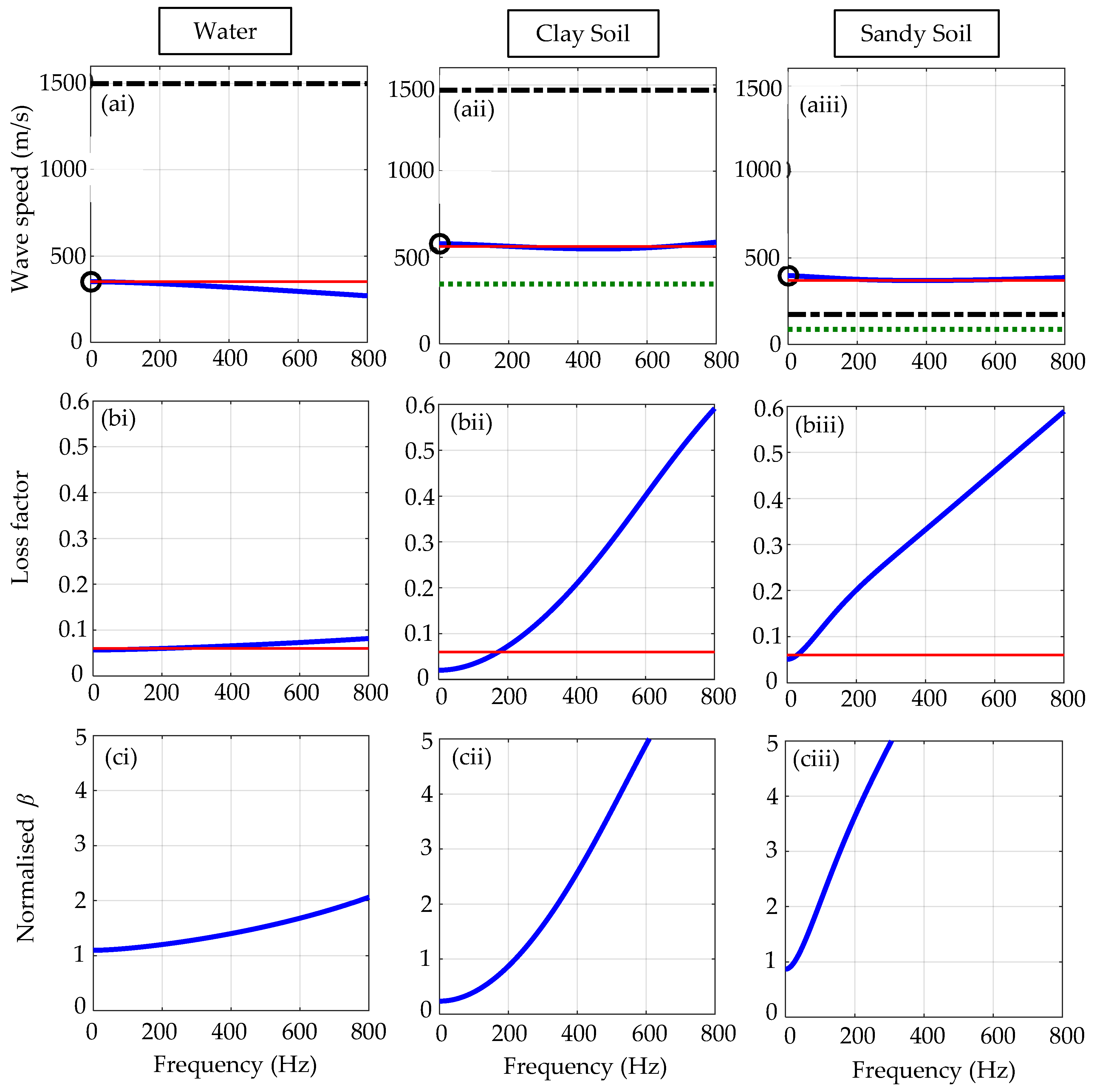
is defined as the loss factor. Thus, the two main features of the predominantly fluid-borne propagating wave, namely the speed at which it propagates and the amount it decays, are encapsulated in the wavenumber. The following sections show how the wavenumber is related to the pipe and soil properties in a clear physical way using the concept of wave dynamic stiffness. Three distinct scenarios are investigated involving water, clay soil, and sandy soil as the surrounding mediums and the governing factors influencing the leak noise propagation in each case are identified.
3. Derivation of the Wavenumber
The pipe system can be split into three components: the water within the pipe, the pipe wall, and the surrounding medium. This is shown in
Figure 1b, in which the applied forces per unit area/pressures to each component are shown. Note that these are assumed to be harmonic in both space and time, i.e.,
and the axial and radial displacements of the three components are given by
, respectively. Radial pressures are applied to each component, but axial forces are only applied to the pipe and the external medium, as there is no axial reaction force between the water inside the pipe and the pipe wall. The frequency domain relationships between the forces per unit area/pressures and the axial and radial displacements for each of the three components are given by
where the
K’s are the wave dynamic stiffnesses of the component parts. Note that
and
as the component parts, act in parallel so the applied force/pressure is shared between them. Note also that at the water/pipe/surrounding medium interface
so the combined system wave dynamic stiffness equation can be alternatively written as
where
and
, and
. To calculate the wavenumber, all the dynamic stiffnesses in Equation (3) are first determined. Following this step, free vibration is considered by setting
, from which the dispersion characteristic for the predominantly fluid-borne wavenumber for the pipe system is estimated. In the following subsections, the wave dynamic stiffness matrices for the three components of the system are derived. After that, the predominantly fluid-borne wavenumber is then derived.
3.1. Wave Dynamic Stiffness Matrix for the Pipe Wall
The derivation of the dynamic stiffness matrix for the pipe wall
is based on the work by Pinnington and Briscoe [
14]. As the formulation is related to the problem of leak detection, only axisymmetric motion of the pipe wall is considered. Furthermore, as the frequency range of interest is much lower than the ring frequency, bending of the pipe wall is neglected [
14]. To simplify the stress–strain relationships, it is assumed that the pipe thickness
h is small compared to the mean radius
a. Applying Hooke’s and Newton’s laws, the relationships between the axial force per unit surface area of the pipe
applied to the pipe alone, and the pressure
acting on the pipe alone, to the axial and radial displacements
are determined to be [
14]
where
,
are the complex Young’s modulus, density, and Poisson’s ratio of the pipe, respectively, in which
are the storage modulus and loss factor of the pipe wall, respectively [
37]. Note that as shown in
Figure 1b, the applied pressure and distributed axial force are assumed to be harmonic in both space and time, so that
and the resulting displacements are
Substituting
in Equations (4a) and (4b), and assuming that the wave speed in the pipe wall is much greater than the predominantly fluid-borne wave in the pipe (which is the case for plastic water distribution pipes where the wave speed in the pipe wall is typically between three and four times that of the predominantly fluid-borne wave [
14]), such that
, results in
where
is the hoop stiffness of a cylindrical ring of unit length, in which the displacement in the axial direction is constrained to be zero. The matrix in Equation (5) is the wave dynamic stiffness matrix for the pipe wall,
in Equation (3).
3.2. Wave Dynamic Stiffness Matrix of the Water within the Pipe
The acoustic pressure at any point in the pipe due to the predominantly fluid-borne wave is given by [
14]
where
is the amplitude of the pressure at radius
r, in which
is a Bessel function of the first kind of zero order, and
is the component of the wavenumber in the radial direction, in which
is the wavenumber for water, where
is the wave speed in an infinite homogeneous body of water, which is approximately 1500 m/s. The relationship between the pressure and the radial acceleration is given by
so that
where ′ denotes the derivative with respect to
r. Considering the relationship between
by setting
which is the mean radius of the pipe, the wave dynamic stiffness of the water at a radius
a is determined to be
At low frequencies, when the acoustic wavelength in water is much greater than the diameter of the pipe
Noting that
Equation (7a) can be written as
where
in which
is the bulk modulus of water. Equation (7b) gives the non-zero element in the matrix
3.3. Wave Dynamic Stiffness Matrix of the Surrounding Medium
In the derivation of the wave dynamic stiffness matrix, it is assumed that the surrounding medium is homogeneous and isotropic and can support the propagation of dilatational and shear waves, i.e., it has both bulk and shear storage moduli, denoted by and , respectively. This means that the analysis is valid for soil, but a surrounding medium of water can also be considered by simply setting the shear modulus to zero.
The wave equations for the surrounding medium are given in terms of displacement potentials as [
38]
where
and
and
are the wave speeds corresponding to dilatational and shear waves, respectively. These two waves are given by
where
is a Hankel function of the second kind of zero order describing the outgoing waves that are propagating from the pipe wall into the surrounding medium, and
and
are the surrounding medium radial wavenumbers, in which
and
are the dilatation and shear wavenumbers. The surrounding medium displacement in the axial and radial directions are related to the displacement potentials by [
33]
Substituting Equations (9a) and (9b) into Equations (10a) and (10b) and setting
, results in
where
and
The relationship between the shear and normal stresses, and the displacements are respectively given by
where the stresses are related to forces applied in the same direction as the displacements. Combining Equations (10a), (10b), (12a), and (12b), and setting
, results in
Combining Equations (11) and (13) gives
where
. The matrix in Equation (14) is the wave dynamic stiffness matrix for the surrounding medium, denoted by
If the surrounding medium is water, then it has no shear stiffness, and Equation (14) reduces to
3.4. Determination of the Predominatly Fluid-Borne Wavenumber
To determine an expression for the wavenumber,
F is first set to zero in Equation (3), and it is noted from Equations (5) and (14) that
and
, so that
where
and
Also, by setting
so that there are only free waves, and substituting for
from Equation (7b), Equation (16) can be rearranged to give an expression for the wavenumber of the predominantly fluid-borne wave, to give
Note that the wavenumber is a function of the wave dynamic stiffnesses. One of these is related to the water in the pipe,
one to the pipe wall
one to the surrounding medium
and one is related to the interaction between the pipe and the surrounding medium
Note, however, that the wave dynamic stiffnesses given in Equation (17) are functions of the wavenumber
k, so it must be solved in a recursive way. If there is no axial distributed force acting on the pipe from the surrounding medium, as would be the case if the surrounding medium is water, then
. This is also the condition when the contact between the soil and the pipe wall is lubricated, which was considered in [
30]. The formulation for this in terms of wave dynamic stiffness is given in
Appendix A.
The wavenumber rewritten in terms of wave dynamic stiffnesses as in Equation (17) represents a novel approach. This new way of expressing the wavenumber facilitates an investigation into the way in which the pipe properties and the interface between the soil and the pipe affect the wave behaviour and, hence, leak noise propagation.
5. Effects of the Component Parts of the System
To illustrate the relative importance of the wave dynamic stiffness terms
, and
in Equation (17), their real and imaginary parts are plotted for three conditions in
Figure 4a and
Figure 4b, respectively. In each case, the pipe is considered to be made from medium-density polyethylene (MDPE), whose dimensions and material properties are given in
Table 3. The properties of three types of surrounding medium, namely water, stiff clay soil, or sandy soil, some of which have been determined from measurements at different test sites, are given in
Table 4.
If the surrounding medium is water, then no waves radiate from the pipe into the surrounding medium. If the surrounding medium is stiff clay soil, then a shear wave propagates from the pipe into the soil, and if the surrounding medium is sandy soil, then both shear and dilatational waves radiate from the pipe into the soil [
20,
32].
5.1. Pipe In Vacuo
Before discussing the effects of the different types of surrounding medium, it is instructive to review the in vacuo case with the new formulation, i.e., a water-filled pipe alone, such that
. This case has been extensively studied, for example [
14,
16], so it is only briefly discussed here. Referring to Equation (17),
and
so that
which means that the pipe is unconstrained in the axial direction. The term
is the axially unconstrained hoop stiffness, which is constant with frequency, and the inertial effect of the pipe is given by the term
which is very small for frequencies well below the ring frequency.
For an in vacuo pipe, and so that which is constant with frequency. Thus, for frequencies well below the ring frequency
5.2. Pipe Surrounded by Water
This case has been studied in [
39] and is only briefly discussed here in the context of the new formulation. The real parts of the wave dynamic stiffnesses
normalised by
are plotted in
Figure 4(ai) for the case when the pipe is surrounded by water. Note that the model is valid since the upper frequency of 800 Hz is about 1/3 of the ring frequency. The difference between this case and the in vacuo case is that
so that
which is negative or equal to zero, and exhibits mass-like behaviour [
32]. It can be seen from
Figure 4(ai) that
is zero at zero frequency and becomes increasingly negative as frequency increases. Thus, the total real part of the dynamic stiffness, given by the thick solid blue line in
Figure 4(ai), has a normalised value corresponding to the axially unconstrained hoop stiffness at zero frequency. It reduces as frequency increases, which is mainly due to the mass loading effect of the surrounding water.
The normalised imaginary parts of the wave dynamic stiffnesses
are plotted in
Figure 4(bi). Again, note that the only difference between this case and the in vacuo case is that
which is zero at zero frequency and is small but negative as frequency increases. This means that a small amount of acoustic energy passes from the water to the pipe, which occurs because of decaying wavefields in both the pipe and the soil, with the decay being greater in the pipe than in the soil at any axial position. A normalised dynamic stiffness either higher or lower than the green dotted line means that the component has a greater or lesser effect than that of the pipe.
5.3. Pipe Surrounded by Stiff Clay Soil
The main differences between this case and when the pipe is surrounded by water are that the soil has a shear stiffness and the bulk modulus of the soil is much higher than that of water. In the particular case studied, the shear stiffness of the soil, given by is larger than the constrained hoop stiffness of the pipe given by This has an effect on the pipe wave speed and is discussed further in the next section.
The real parts of the wave dynamic stiffnesses
normalised by
are plotted in
Figure 4(aii). Note that
as in the previous case. However,
is very small in comparison to
and is zero at zero frequency, so that
which means that the pipe is constrained in the axial direction due to the shear stiffness of the soil and, consequently, has a higher hoop stiffness than when the pipe is surrounded by water. Note that
is about 50% greater than
which can be seen by examining the values at zero frequency in
Figure 4(aii). As the wave dynamic stiffness of the soil also exhibits mass-like behaviour, the
decreases as frequency increases. Thus, at zero frequency, the total real part of the dynamic stiffness, given by the thick solid blue line in
Figure 4(aii), has a normalised value corresponding to the sum of the axially constrained hoop stiffness and the shear stiffness of the soil. It reduces as frequency increases, which is mainly due to the mass loading of the soil.
The normalised imaginary parts of the wave dynamic stiffnesses
are plotted in
Figure 4(bii). Note that
is the same as the in vacuo case, and that
for frequencies greater than about 200 Hz, so at higher frequencies,
accounts for the majority of energy dissipation in this case. This means that the axial connection between the pipe and the soil, which was neglected in [
32] is an important factor in the leakage of acoustic energy from the pipe to the soil in this case and should be included in a model of the pipe–soil system. At higher frequencies,
is proportional to frequency, so the energy dissipation due to shear wave propagation in the soil has the effect of adding linear viscous damping to the pipe.
5.4. Pipe Surrounded by Sandy Soil
The main difference between this case and when the pipe is surrounded by clay soil is that the bulk and shear modulus are much smaller. This means that the shear stiffness of the soil only has a marginal effect on the pipe wave speed. However, because both the shear and dilatational wave speed in the soil are smaller than the pipe wave speed, both waves radiate from the pipe, creating a large radiation-damping effect on the pipe.
The real parts of the wave dynamic stiffnesses
normalised by
are plotted in
Figure 4(aiii). Note that
is the same as in the previous cases. However,
and
are both very small in comparison to
, so that
which means that although the pipe is constrained in the axial direction due to the shear stiffness of the soil at zero frequency, the surrounding soil only has a marginal stiffening effect at higher frequencies. The slight reduction in the total dynamic stiffness as frequency increases is due to the mass loading effect of the soil as before.
The normalised imaginary parts of the wave dynamic stiffnesses
are plotted in
Figure 4(biii). Note that, as with in the previous cases,
, but for frequencies up to about 100 Hz,
, and for frequencies greater than about 300 Hz,
which is in contrast to the case when the pipe is surrounded by stiff clay soil. At higher frequencies,
is proportional to frequency, so the energy dissipation due to shear and dilatational wave propagation in the soil has the effect of adding linear viscous damping to the pipe.



 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}