A Predictive Vehicle Ride Sharing Recommendation System for Smart Cities Commuting


Abstract
:1. Introduction
2. Materials and Methods
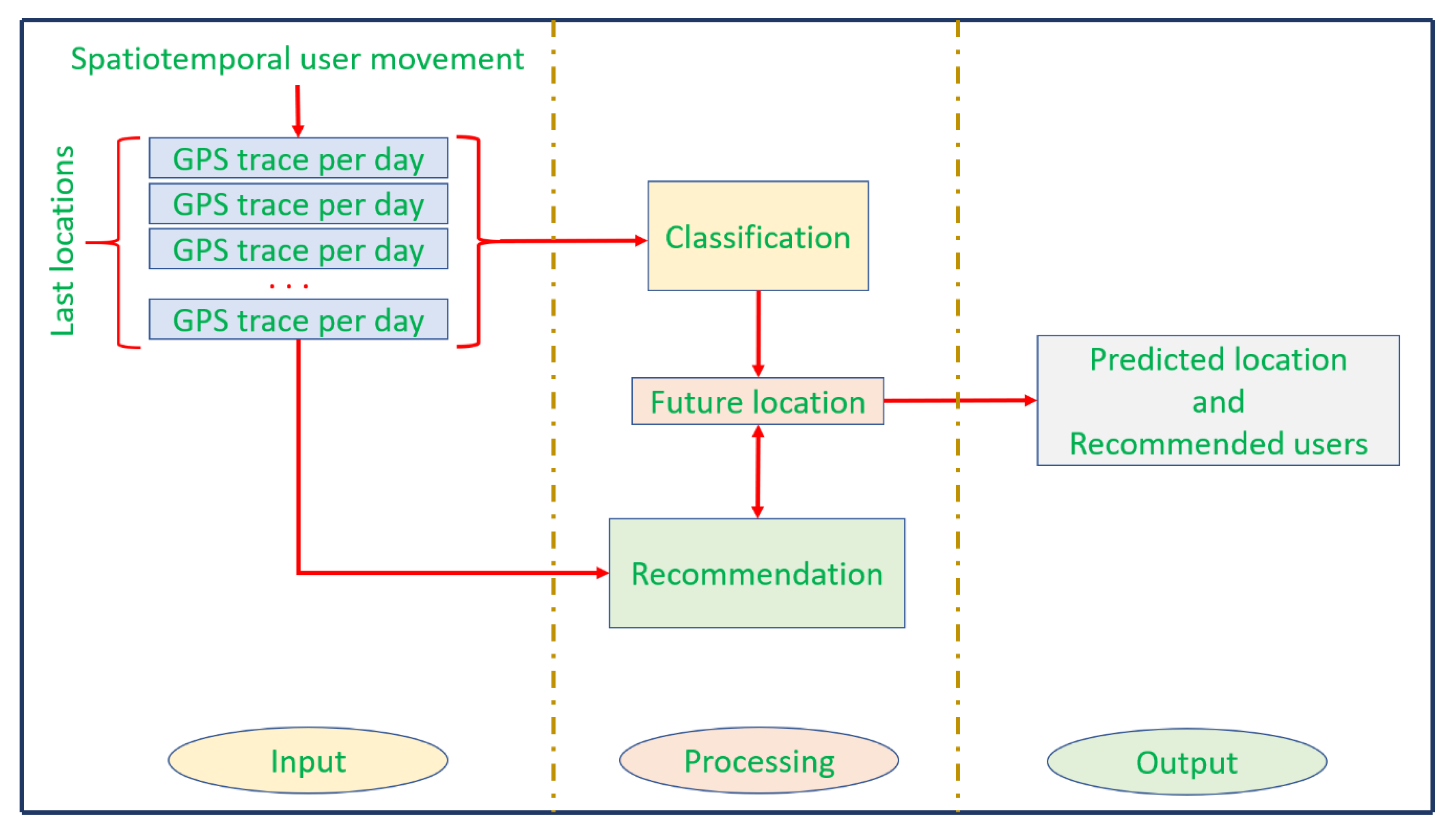
2.1. System Architecture Overview
2.2. AI-Enabled Weighted Pattern Matching Model
2.3. Evaluation Method and Metrics
2.3.1. 10-Fold Cross Validation Evaluation Method
2.3.2. Prediction Accuracy Evaluation Metric
2.3.3. Recommendation MAP@N Evaluation Metric
3. Results
3.1. Experimental Parameters
3.2. Experiments
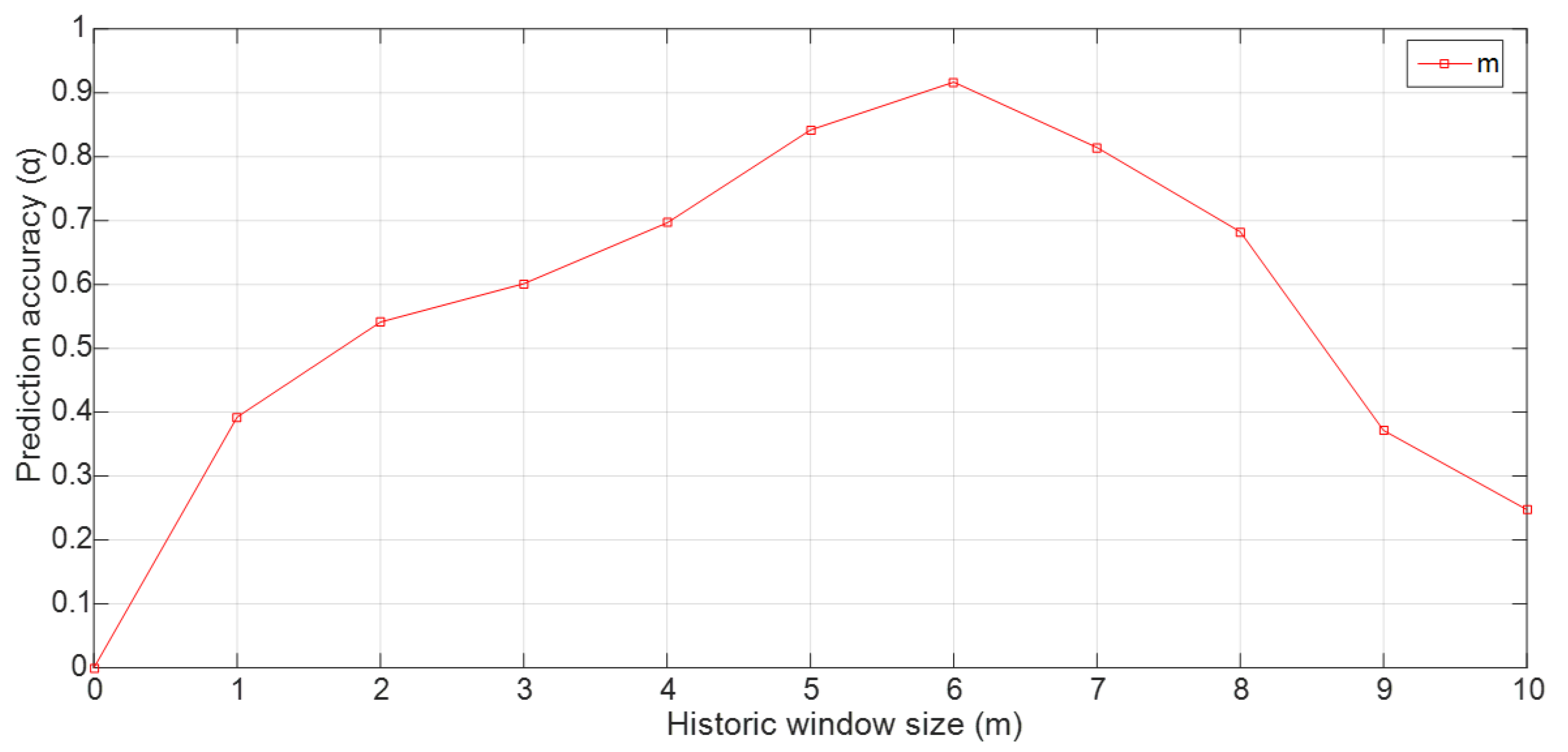
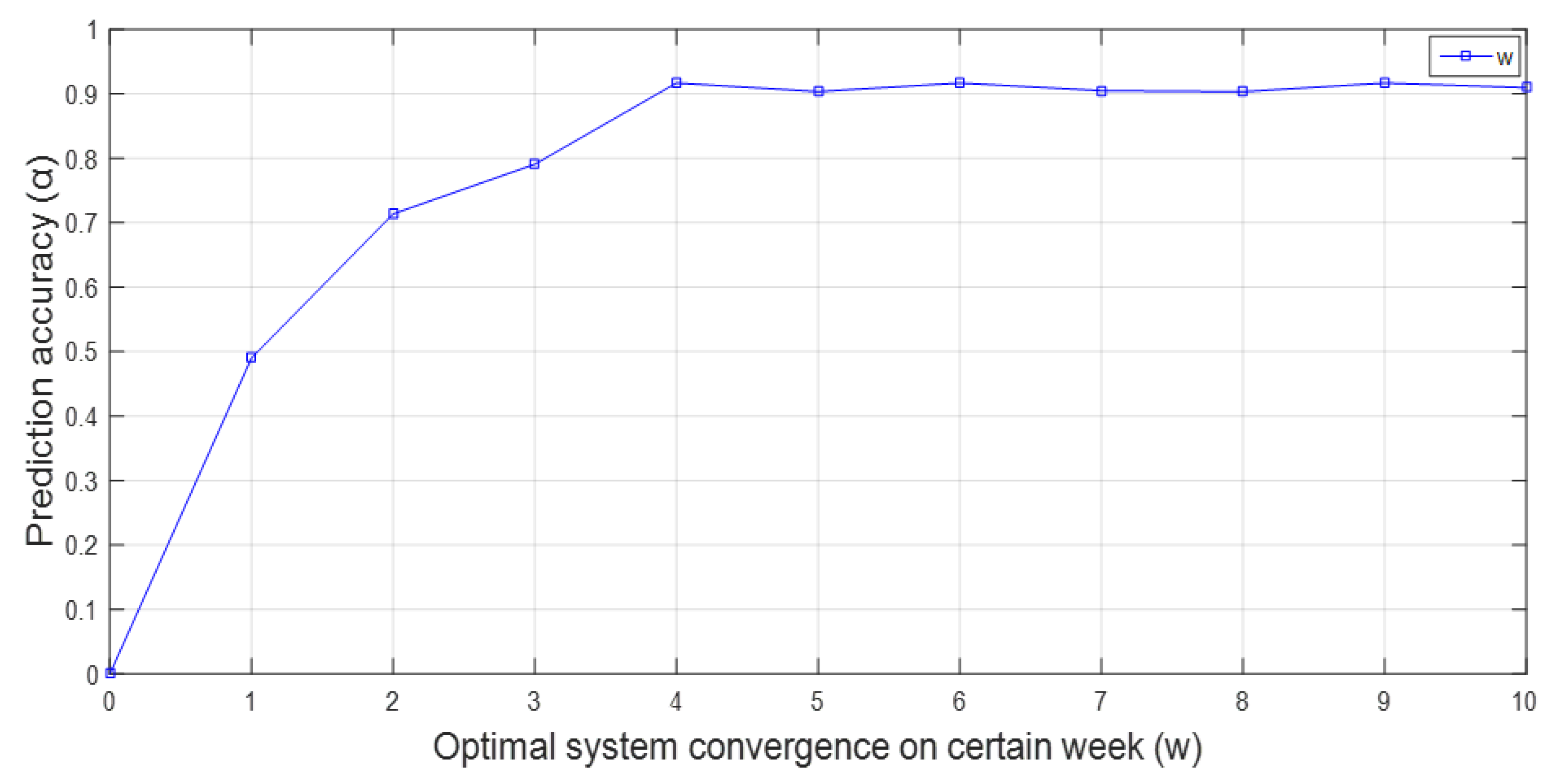
3.2.1. Prediction Accuracy
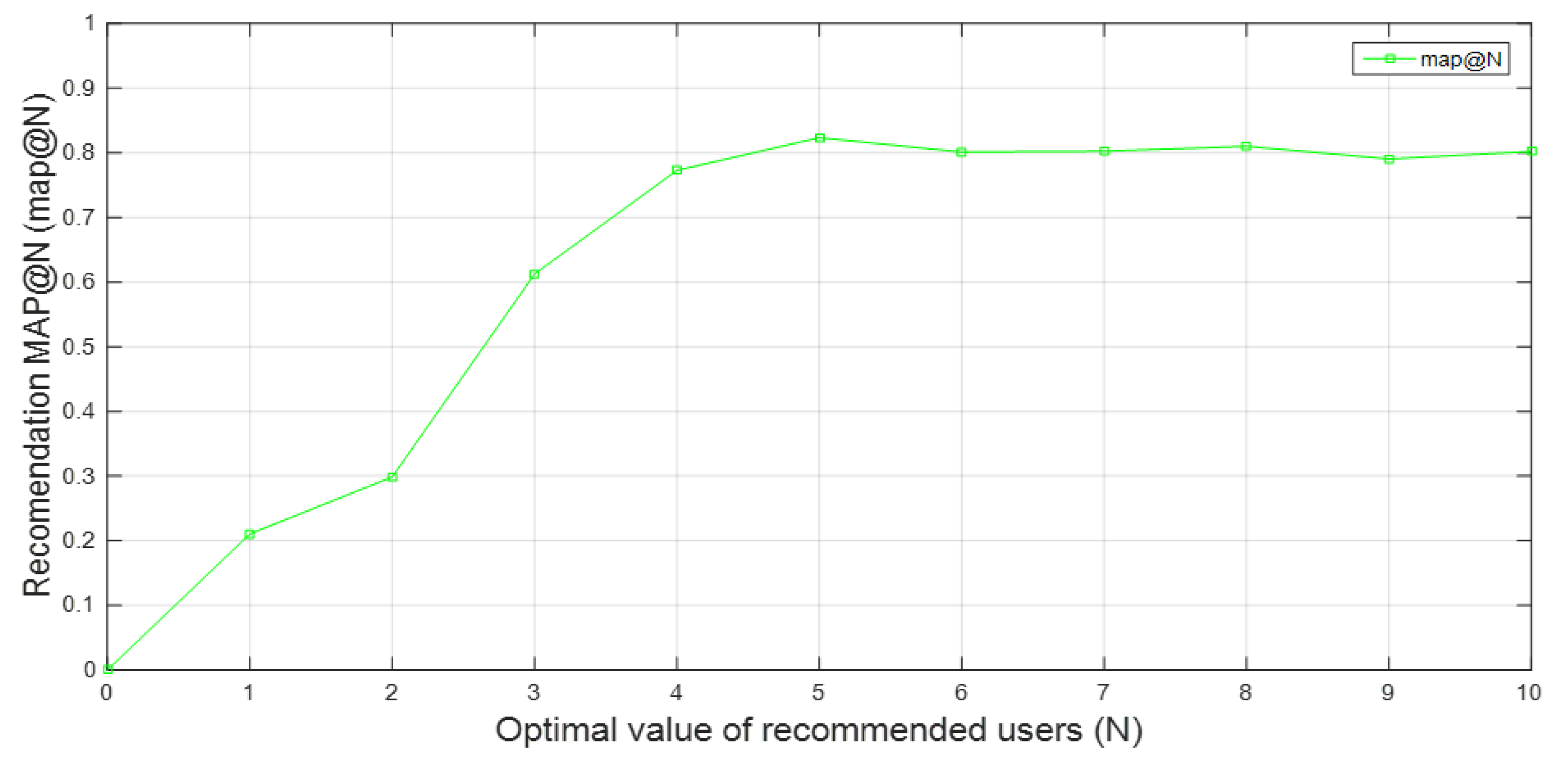
3.2.2. Recommendation MAP@N
4. Discussion
4.1. Discussion on the Results
4.2. Comparison with Other Research Efforts
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmadi-Assalemi, G.; Al-Khateeb, H.; Epiphaniou, G.; Maple, C. Cyber Resilience and Incident Response in Smart Cities: A Systematic Literature Review. Smart Cities 2020, 3, 894–927. [Google Scholar] [CrossRef]
- Nesmachnow, S.; Hernandez-Callejo, L. CITIES: Ibero-American Research Network for Sustainable, Efficient, and Integrated Smart Cities. Smart Cities 2020, 3, 758–766. [Google Scholar] [CrossRef]
- Serrano, W. Digital Systems in Smart City and Infrastructure: Digital as a Service. Smart Cities 2018, 1, 134–154. [Google Scholar] [CrossRef] [Green Version]
- Belli, L.; Cilfone, A.; Davoli, L.; Ferrari, G.; Adorni, P.; Nocera, D.F.; Olio, A.D.; Pellegrini, C.; Mordacci, M.; Bertolotti, E. IoT-Enabled Smart Sustainable Cities: Challenges and Approaches. Smart Cities 2020, 3, 1039–1071. [Google Scholar] [CrossRef]
- Radu, L.D. Disruptive Technologies in Smart Cities: A Survey on Current Trends and Challenges. Smart Cities 2020, 3, 1022–1038. [Google Scholar] [CrossRef]
- Tzafestas, S.G. Ethics and Law in the Internet of Things World. Smart Cities 2018, 1, 98–120. [Google Scholar] [CrossRef] [Green Version]
- Lucic, M.C.; Wan, X.; Ghazzai, H.; Massoud, Y. Leveraging Intelligent Transportation Systems and Smart Vehicles Using Crowdsourcing: An Overview. Smart Cities 2020, 3, 341–361. [Google Scholar] [CrossRef]
- El-Garoui, L.; Pierre, S.; Chamberland, S. A New SDN-Based Routing Protocol for Improving Delay in Smart City Environments. Smart Cities 2020, 3, 1004–1021. [Google Scholar] [CrossRef]
- Costa, D.G.; Damasceno, A.; Silva, I. CitySpeed: A Crowdsensing-Based Integrated Platform for General-Purpose Monitoring of Vehicular Speeds on Smart Cities. Smart Cities 2019, 2, 46–65. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Stincescu, T.; Ballantyne, E.E.F.; Stone, D.A. Sustainable City: Energy Usage Prediction Method for Electrified Refuse Collection Vehicles. Smart Cities 2020, 3, 1100–1116. [Google Scholar] [CrossRef]
- Xiong, Z.; Zheng, J.; Song, D.; Zhong, S.; Huang, Q. Passenger Flow Prediction of Urban Rail Transit Based on Deep Learning Methods. Smart Cities 2019, 2, 371–387. [Google Scholar] [CrossRef] [Green Version]
- Das, V. Does Adoption of Ridehailing Results in More Frequent Sustainable Mobility Choices? An Investigation Based on National Household Travel Survey (NHTS) 2017 Data. Smart Cities 2020, 3, 385–400. [Google Scholar] [CrossRef]
- Hipogrosso, S.; Nesmachnow, S. Analysis of Sustainable Public Transportation and Mobility Recommendations for Montevideo and Parque Rodo Neighborhood. Smart Cities 2020, 3, 479–510. [Google Scholar] [CrossRef]
- Napoles, V.M.P.; Paez, D.G.; Panelas, J.L.E.; Perez, O.G.; Santacruz, M.J.G.; Pablos, F.M.D. Smart Bus Stops as Interconnected Public Spaces for Increasing Social Inclusiveness and Quality of Life of Elder Users. Smart Cities 2020, 3, 430–443. [Google Scholar] [CrossRef]
- Jiang, Y.; Cao, J.; Liu, Y.; Fan, J. West Lake Tourist: A Visual Analysis System Based on Taxi Data. Smart Cities 2019, 2, 345–358. [Google Scholar] [CrossRef] [Green Version]
- Monteiro, D.L.V.; Perego, R.; Rinzivillo, S.; Times, V.C. Boosting Ride Sharing with Alternative Destinations. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2290–2300. [Google Scholar] [CrossRef]
- Tirachini, A.; Chaniotakis, E.; Abouelela, M.; Antoniou, C. The sustainability of shared mobility: Can a platform for shared rides reduce motorized traffic in cities? Transp. Res. Part. C 2020, 117, 1–15. [Google Scholar] [CrossRef]
- Enzi, M.; Parragh, N.S.; Pisinger, D.; Prandtstetter, M. Modeling and solving the multimodal car- and ride-sharing problem. Eur. J. Oper. Res. 2020, 1–14. [Google Scholar] [CrossRef]
- Correa, O.; Mustafizur Rahman Khan, A.K.M.; Tanin, E.; Kulik, L.; Ramamohanarao, K. Congestion-Aware Ride-Sharing. ACM Trans. Spat. Algorithms Syst. 2019, 5, 1–33. [Google Scholar]
- Manik, D.; Molkenthin, N. Topology dependence of on-demand ride-sharing. Appl. Netw. Sci. 2020, 5, 1–16. [Google Scholar]
- Xianan, H.; Li, B.; Peng, H.; Auld, J.A.; Sokolov, V.O. Eco-Mobility-on-Demand Fleet Control with Ride-Sharing. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Ruch, C.; Lu, C.Q.; Sieber, L.; Frazzoli, E. Quantifying the Efficiency of Ride Sharing. IEEE Trans. Intell. Transp. Syst. 2020, 1–6. [Google Scholar] [CrossRef]
- Goel, P.; Kulik, L.; Ramamohanarao, K. Privacy-Aware Dynamic Ride Sharing. ACM Trans. Spat. Algorithms Syst. 2016, 2, 1–41. [Google Scholar] [CrossRef]
- Ozkan, E. Joint pricing and matching in ride-sharing systems. Eur. J. Operat. Res. 2020, 287, 1149–1160. [Google Scholar] [CrossRef]
- UberMarketplace. How Does Uber Match Riders with Drivers? Available online: https://marketplace.uber.com/matching (accessed on 14 January 2021).
- Schaller, B. Can Sharing a Ride Make for Less Traffic? Evidence from Uber and Lyft and Implications for Cities. Transp. Policy 2020, 1–25. [Google Scholar] [CrossRef]
- Daganzo, C.F.; Ouyang, Y.; Yang, H. Analysis of ride-sharing with service time and detour guarantees. Transp. Res. Part. B 2020, 140, 130–150. [Google Scholar] [CrossRef]
- Qian, X.; Kumar, D.; Zhang, W.; Ukkusuri, S.V. Understanding the Operational Dynamics of Mobility Service Providers: A Case of Uber. ACM Trans. Spat. Algorithms Syst. 2020, 6, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Cao, B.; Hou, C.; Zhao, L.; Alarabi, L.; Fan, J.; Mokbel, M.F.; Basalamah, A. SHAREK*: A Scalable Matching Method for Dynamic Ride Sharing. Geoinformatica 2020, 24, 881–913. [Google Scholar] [CrossRef]
- Luo, M.; Du, B.; Klemmer, K.; Zhu, H.; Ferhatosmanoglu, H.; Wen, H. D3P: Data-driven Demand Prediction for Fast Expanding Electric Vehicle Sharing Systems. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020. [Google Scholar] [CrossRef] [Green Version]
- Yatnalkar, G.; Narman, H.S.; Malik, H. An Enhanced Ride Sharing Model Based on Human Characteristics and Machine Learning Recommender System. In Proceedings of the 3rd International Conference on Emerging Data and Industry 4.0 (EDI40), Warsaw, Poland, 6–9 April 2020. [Google Scholar]
- Escalona, J.A.; Manalo, B.; Limjoco, W.J.R.; Dizon, C.C. A Ride Sharing System based on An Expansive Search-Based Algorithm. In Proceedings of the IEEE Region 10 Conference (TENCON), Osaka, Japan, 16–19 November 2020. [Google Scholar]
- Yousaf, G.; Li, J.; Chen, L.; Tang, I.; Dai, X. Generalized multipath planning model for ride-sharing systems. Front. Comput. Sci. 2014, 8, 100–118. [Google Scholar] [CrossRef]
- Zuo, H.; Zhao, Y.; Shen, B.; Zheng, W.; Huang, Y. High-capacity ride-sharing via shortest path clustering on large road networks. J. Supercomput. 2020, 1–26. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/user/PierrosPapadeas/traces/291454 (accessed on 14 January 2021).
- Global Positioning System (GPS). Available online: https://www.gps.gov/systems/gps/performance/accuracy/ (accessed on 14 January 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Prediction and Recommendation Algorithm |
|---|---|
| 1 | Input://knowledge base |
| 2 | //examined instance |
| 3 | //day of the week |
| 4 | //historic window size |
| 5 | //prediction window size |
| 6 | //spatial historic similarity threshold |
| 7 | //spatial prediction similarity threshold |
| 8 | //recommendation list size |
| 9 | Output://returned recommendation list |
| 10 | Begin |
| 11 | //returned recommendation list is empty |
| 12 | //initialize recommendation list size |
| 13 | //read the examined instance from user mobile app |
| 14 | //read the first instance of the |
| 15 | While Do//traverse |
| 16 | If Then |
| 17 | //if current and predicted locations of are similar w.r.t. similarity for certain day |
| 18 | For Do//traverse from first to last historic location of the trajectory |
| 19 | If Then//step by step historic comparison |
| 20 | //historic similarity flag increases |
| 21 | End If |
| 22 | End For |
| 23 | If Then |
| 24 | //if historic similarity condition w.r.t. holds proceed to recommendation list step |
| 25 | If Then//if size of is less than or equal to |
| 26 | //recommendation list is expanded |
| 27 | Else |
| 28 | //sort recommendations in ascending order of similarity |
| 29 | //return recommendation list and exit |
| 30 | End If |
| 31 | End If |
| 32 | End If |
| 33 | End While |
| 34 | End |
| Parameter | Value |
|---|---|
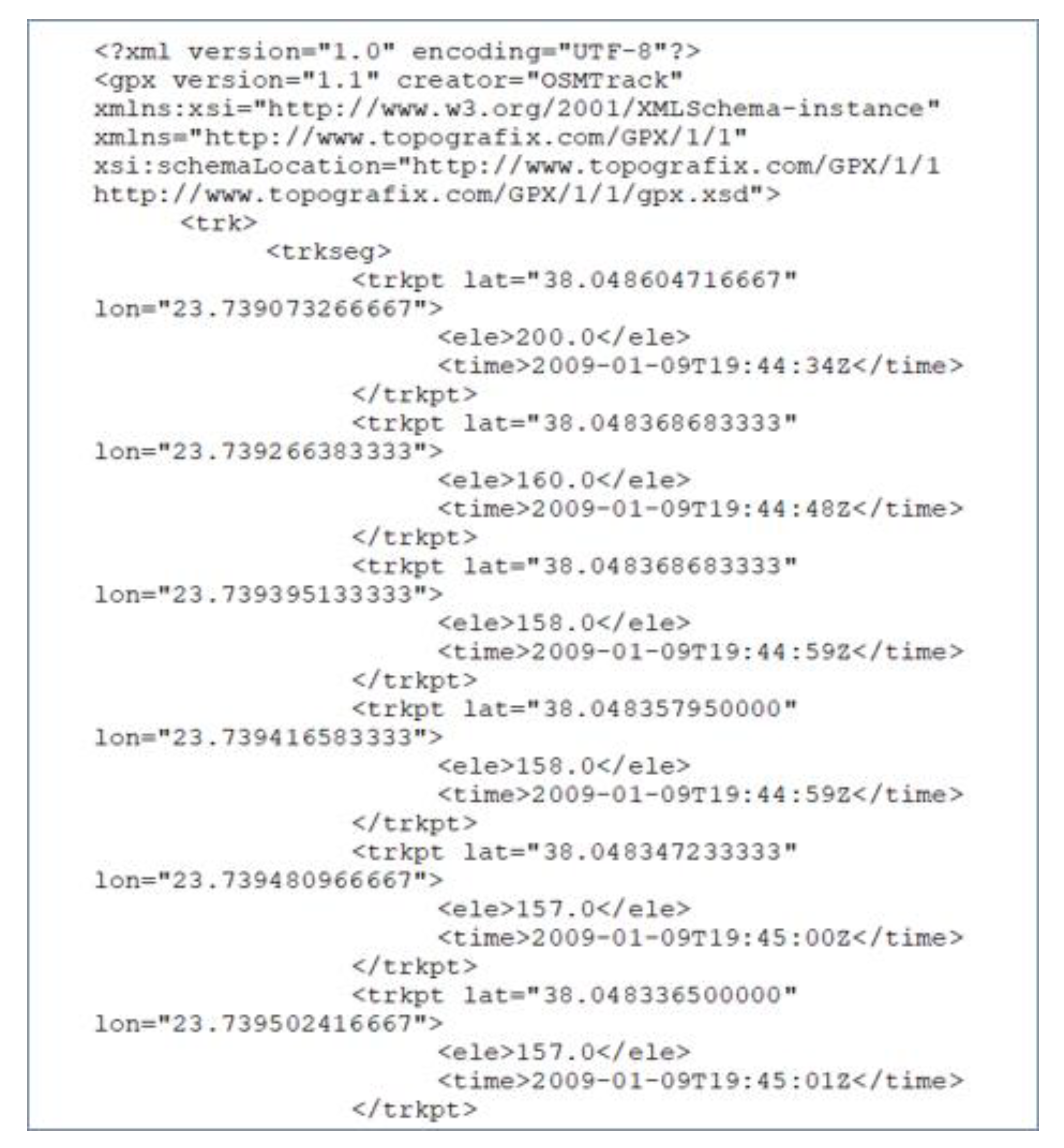
| GPS traces length | 8 decimal digits |
| Sensitivity | 10 meters |
| Minimum latitude | 38.04582595 |
| Minimum longitude | 23.73619793 |
| Maximum latitude | 38.05432318 |
| Maximum longitude | 23.74390125 |
| Coverage area | 0.64 square kilometers |
| Parameter | Value |
|---|---|
| 1 GPS predicted location | |
| (10 m) | |
| (100 m) | |
| 100 users totally | |
| 2958 instances |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anagnostopoulos, T. A Predictive Vehicle Ride Sharing Recommendation System for Smart Cities Commuting. Smart Cities 2021, 4, 177-191. https://doi.org/10.3390/smartcities4010010
Anagnostopoulos T. A Predictive Vehicle Ride Sharing Recommendation System for Smart Cities Commuting. Smart Cities. 2021; 4(1):177-191. https://doi.org/10.3390/smartcities4010010
Chicago/Turabian StyleAnagnostopoulos, Theodoros. 2021. "A Predictive Vehicle Ride Sharing Recommendation System for Smart Cities Commuting" Smart Cities 4, no. 1: 177-191. https://doi.org/10.3390/smartcities4010010
APA StyleAnagnostopoulos, T. (2021). A Predictive Vehicle Ride Sharing Recommendation System for Smart Cities Commuting. Smart Cities, 4(1), 177-191. https://doi.org/10.3390/smartcities4010010