
A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation



Abstract
:1. Introduction
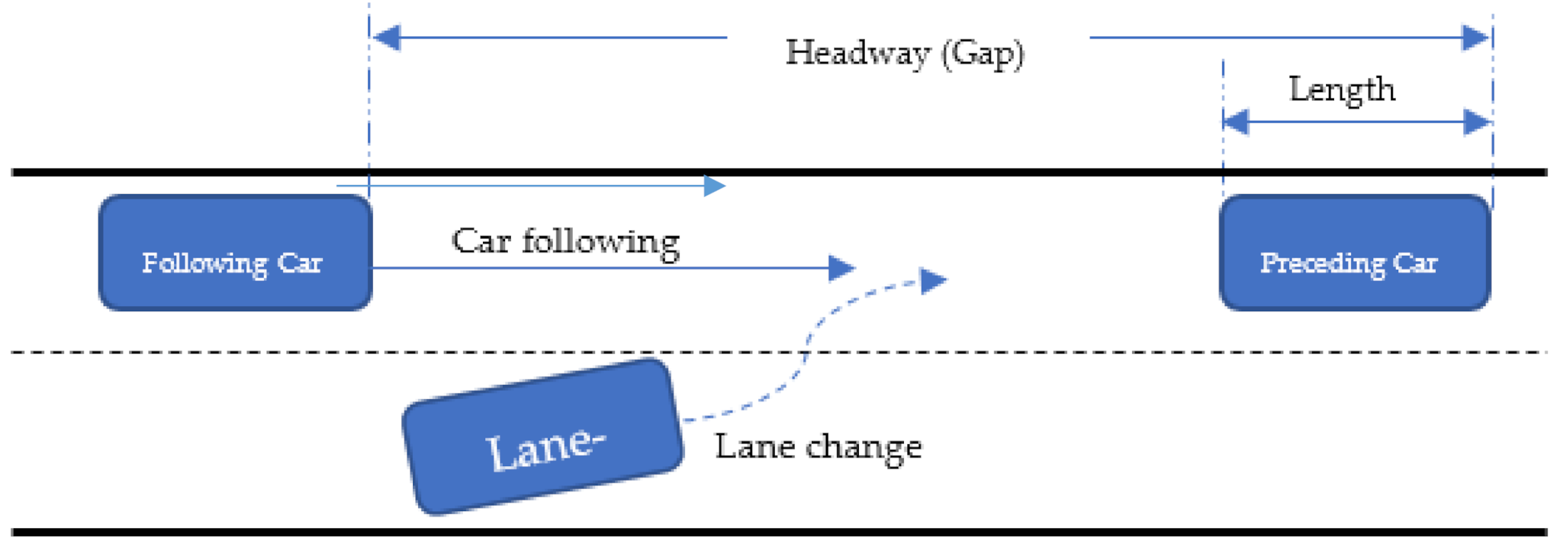
2. Car-Following Models for Human-Driven and Autonomous Vehicles
2.1. The GM Car-Following Model
2.2. The Safety-Distance or Collision Avoidance Car-Following Model
2.3. The Psychophysical Car-Following Models and the Wiedemann Model
2.4. The Optimal Velocity Model (OVM) Car-Following Model
The Intelligent Driver Model (IDM) Car-Following Model
2.5. The Adaptive Cruise Control (ACC) and Cooperative Adaptive Cruise Control (CACC) Models
2.6. Lane-Change Models

{kind=link}
{kind=link}
| Situation | Decision |
|---|---|
| Is it possible to change a lane safely without meeting the risk of a collision? | The driver looks for a safe gap and speed of vehicles (front and back) in the target lane. |
| Where are the permanent locations of obstructions and how to avoid them? | The driver avoids blocked lanes or dropping lanes. |
| Are there any dedicated lanes for transit and high occupancy vehicles (HOV)? | The driver does not consider transit or HOV lanes to avoid being trapped. |
| When to consider a lane-change for the intended turning movements? | The driver inspects the distance from the intended turning and makes a necessary lane change. It becomes critical when the threshold is crossed and it is not safe for the driver to take a turn without a possible collision in the adjacent lanes. |
| The presence of heavy vehicles in urban traffic? | Heavy vehicles drive at slower speeds in mixed traffic. Hence, the driver maintains a substantial gap from heavy vehicles to ease the lane-change procedure and also to avoid being trapped behind it. |
| Is it useful to change lanes for a potential gain in the average speed? | This driver gains potential speed by either lane changing or overtaking a slow-moving vehicle. |
3. Micro-Simulation Modeling Tools for Human-Driven and Autonomous Vehicles
3.1. Modeling Human Drivers Using VISSIM
3.2. Modeling of Autonomous Vehicles in VISSIM
3.2.1. Parameters for AVs and CAVs Using Wiedemann Car-Following Model in VISSIM
3.2.2. CoEXist and VISSIM—Automation-Ready Framework
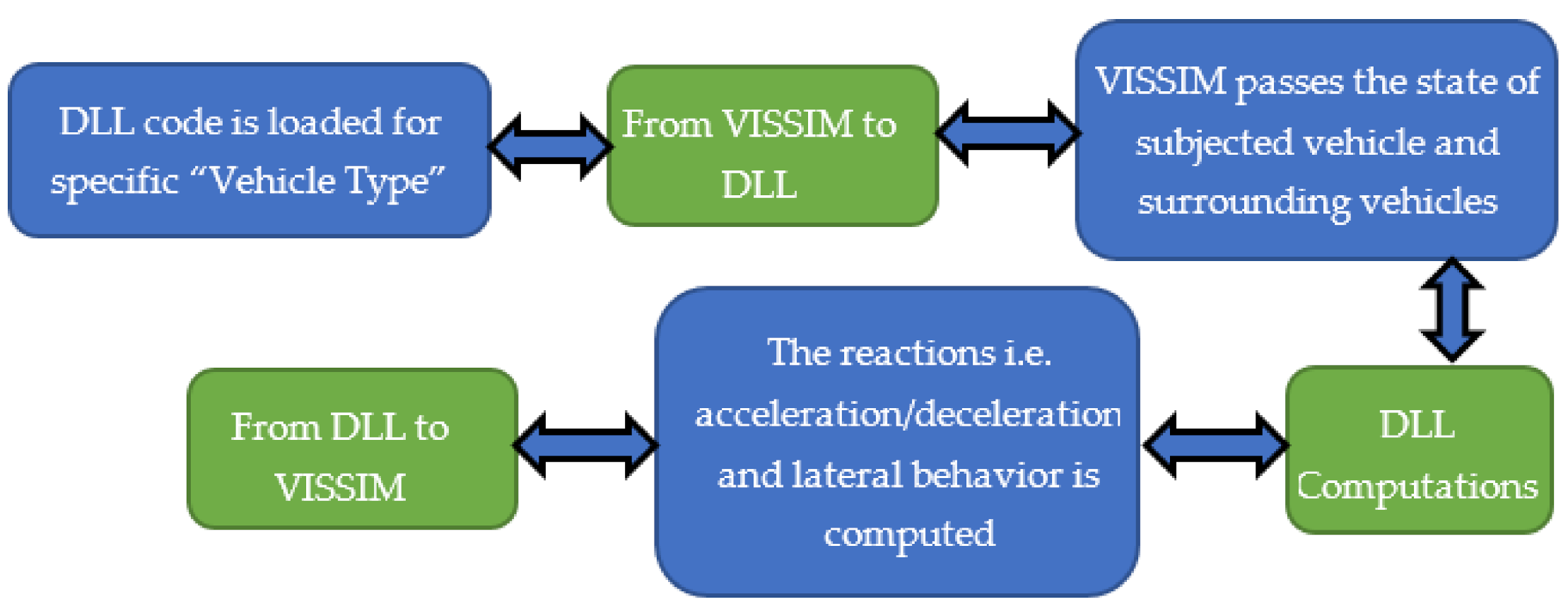
3.3. VISSIM DLL-APIs and COM Interface for New Future AV Car-Following Model Development
- (1)
- Development of a VISSIM simulation network (e.g., links, connectors, etc.).
- (2)
- Writing code in C++ for ACC and CACC.
- (3)
- Compiling the code into a DLL file.
- (4)
- The DriverModel-DLL is loaded into VISSIM for a specific vehicle type.
- (5)
- VISSIM reads the DLL logic for each time step.
- (6)
- Using the “Set” function, the driver behavior is sent from VISSIM to DLL for every time-step.
- (7)
- Using the “Get” function, the update driver behavior is sent from DLL to VISSIM.
- (8)
- Using the “Execute” function, VISSIM moves the driver (i.e., DLL affected vehicle)
4. Conclusions
- Autonomous and connected cars would observe a longer transition period during which the robotic and the conventional human drivers will share the roadways, thus creating mixed traffic, until achieving complete market penetration. The micro-simulation tool provides an opportunity for the user and policymakers to investigate the anticipated impacts of mixed traffic by either modifying the internal car following model, i.e., driving behavior parameters or implement an external smart logic for AVs and CAVs.
- The car-following models for human drivers can be classified into three categories including the GM-type models such as Gazis–Herman–Rothery (GHR) model, the safety-distance such as the Gipps model, and the psychophysical car-following such as Wiedemann models. The GM model provides a basis for all other car-following models. For AVs and CAVs, dynamic car-following model, i.e., OVM, and a mixed condition car-following model, i.e., IDM, the ACC/CACC models can be used. It is noticeable that researchers have implemented the cruise control approach for modeling the AVs and CAVs.
- Among various simulation tools, the VISSIM simulation tool is a popular tool that uses a psychophysical car-following model, i.e., Wiedemann 74 and Wiedemann 99. A user can model the expected behavior of AVs/CAVs by modifying the Wiedemann model parameters and other driving behaviors. In addition, the dedicated features for autonomous diving were also provided in the recent version of VISSIM, such as “AV-ready” through which a user can effectively model autonomous behaviors such as platooning, communication between vehicles and infrastructures, and others. The DLL-APIs and COM interface is an additional tool that can completely replace the internal car-following model with a user-defined future AV-car following model. The COM interface, on the other hand, enables the users to perform operations that are not possible in a typical GUI of the software.
Author Contributions
Funding
Conflicts of Interest
References
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Bierstedt, J.; Gooze, A.; Gray, C.; Peterman, J.; Raykin, L.; Walters, J. Effects of Next-Generation Vehicles on Travel Demand and Highway Capacity; FP Think Working Group: Washington, DC, USA, 2014; Volume 8, pp. 10–11. [Google Scholar]
- Silberg, G.; Wallace, R.; Matuszak, G.; Plessers, J.; Brower, C.; Subramanian, D. Self-Driving Cars: The Next Revolution; White Paper; KPMG LLP & Center of Automotive Research: Ann Arbor, MI, USA, 2012; Volume 9, pp. 132–146. [Google Scholar]
- Kotsialos, A.; Papageorgiou, M.; Diakaki, C.; Pavlis, Y.; Middelham, F. Traffic flow modeling of large-scale motorway networks using the macroscopic modeling tool METANET. IEEE Trans. Intell. Transp. Syst. 2002, 3, 282–292. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.-Y.; Qiu, T.Z.; Varaiya, P.; Horowitz, R.; Shladover, S.E. Combining variable speed limits with ramp metering for freeway traffic control. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 2266–2271. [Google Scholar]
- Lochrane, T. A New Multidimensional Psycho-Physical Framework for Modeling Car-Following in a Freeway Work Zone. Ph.D. Thesis, University of Central Florida, Orlando, FL, USA, 2014. (In German). [Google Scholar]
- U.S. Department of Transportation Federal Highway Administration. Types of Traffic Analysis Tools; US DOT: Washington, DC, USA, 2020.
- Van Arem, B.; Tampere, C.M.; Malone, K. Modelling traffic flows with intelligent cars and intelligent roads. In Proceedings of the IEEE IV2003 Intelligent Vehicles Symposium, Proceedings (Cat. No. 03TH8683), Columbus, OH, USA, 9–11 June 2003; pp. 456–461. [Google Scholar]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Olstam, J.J.; Tapani, A. Comparison of Car-Following Models; Swedish National Road and Transport Research Institute: Linköping, Sweden, 2004; Volume 960. [Google Scholar]
- PTV Group. PTV VISSIM 2020 User Manual; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]
- Treiber, M.; Kesting, A. Traffic flow dynamics. In Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Hoogendoorn, S.P.; Hoogendoorn, R. Generic calibration framework for joint estimation of car-following models by using microscopic data. Transp. Res. Rec. 2010, 2188, 37–45. [Google Scholar] [CrossRef]
- Viti, F.; Wolput, B.; Tampère, C.M.; Vandervelden, P. Dynamic modeling of VISSIM’s critical gap parameter at unsignalized intersections. Transp. Res. Rec. 2013, 2395, 12–20. [Google Scholar] [CrossRef]
- Toledo, T.; Koutsopoulos, H.N.; Ben-Akiva, M. Integrated driving behavior modeling. Transp. Res. Part C Emerg. Technol. 2007, 15, 96–112. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Koutsopoulos, H.N.; Farah, H. Latent class model for car following behavior. Transp. Res. Part B Methodol. 2012, 46, 563–578. [Google Scholar] [CrossRef]
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic dynamics: Studies in car following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef]
- Herman, R. Car-following and steady state flow. In Proceedings of the Theory of Traffic Flow Symposium Proceedings, Warren, MI, USA, 13 February 1959; Elsevier: New York, NY, USA, 1961; pp. 1–13. [Google Scholar]
- Subramanian, H. Estimation of Car-Following Models. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1996. [Google Scholar]
- Ahmed, K.I. Modeling Drivers’ Acceleration and Lane Changing Behavior. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Wiedemann, R. Simulation des StraBenverkehrsflusses in Schriftenreihe des Tnstituts fir Verkehrswesen der Universitiit Karlsruhe; Universität Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Leutzbach, W. Introduction to the Theory of Traffic Flow; Springer: Berlin, Germany, 1988; Volume 47. [Google Scholar]
- Brackstone, M.; McDonald, M. Car-following: A historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Pipes, L.A. An operational analysis of traffic dynamics. J. Appl. Phys. 1953, 24, 274–281. [Google Scholar] [CrossRef]
- Gipps, P.G. Behavioral car-following model for computer simulation. Transport. Res. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Vasconcelos, L.; Neto, L.; Santos, S.; Silva, A.B.; Seco, Á. Calibration of the Gipps car-following model using trajectory data. Transp. Res. Procedia 2014, 3, 952–961. [Google Scholar] [CrossRef] [Green Version]
- Rakha, H.; Wang, W. Procedure for calibrating Gipps car-following model. Transp. Res. Rec. 2009, 2124, 113–124. [Google Scholar] [CrossRef]
- Punzo, V.; Tripodi, A. Steady-state solutions and multiclass calibration of Gipps microscopic traffic flow model. Transp. Res. Rec. 2007, 1999, 104–114. [Google Scholar] [CrossRef]
- Wilson, R.E. An analysis of Gipps’s car-following model of highway traffic. IMA J. Appl. Math. 2001, 66, 509–537. [Google Scholar] [CrossRef]
- Barceló, J.; Casas, J. Dynamic network simulation with AIMSUN. In Simulation Approaches in Transportation Analysis; Springer: Boston, MA, USA, 2005; pp. 57–98. [Google Scholar]
- Liu, R. Traffic simulation with DRACULA. In Fundamentals of Traffic Simulation; Springer: New York, NY, USA, 2010; pp. 295–322. [Google Scholar]
- SISTM: A Motorway Simulation Model; Leaflet, LF2061; Transportation Research Laboratory: Berks, UK, 1993.
- Silcock, J. SIGSIM Version 1.0 Users Guide; User Guide University of London Centre for Transport Studies: London, UK, 1993. [Google Scholar]
- Lazar, H.; Rhoulami, K.; Rahmani, D. A Review Analysis of Optimal Velocity Models. Period. Polytech. Transp. Eng. 2016, 44, 123–131. [Google Scholar] [CrossRef] [Green Version]
- Wiedemann, R.; Reiter, U. Microscopic Traffic Simulation: The Simulation System MISSION, Background and Actual State; Project ICARUS (V1052) Final Report; CEC: Brussels, Belgium, 1992; Volume 2, pp. 1–53. [Google Scholar]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef] [Green Version]
- Raju, N.; Arkatkar, S.; Joshi, G. Evaluating performance of selected vehicle following models using trajectory data under mixed traffic conditions. J. Intell. Transp. Syst. 2019, 24, 617–634. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Nowakowski, C.; Shladover, S.E.; Cody, D.; Bu, F.; O’Connell, J.; Spring, J.; Dickey, S.; Nelson, D. Cooperative Adaptive Cruise Control: Testing Drivers’ Choices of Following Distances; University of California, Berkeley: Berkeley, CA, USA, 2011; ISSN 1055-1425. [Google Scholar]
- Hunter, M.P.; Guin, A.; Rodgers, M.O.; Huang, Z.; Greenwood, A.T. Cooperative Vehicle–Highway Automation (CVHA) Technology: Simulation of Benefits and Operational Issues; United States Federal Highway Administration: Washington, DC, USA, 2017.
- Kockelman, K.; Avery, P.; Bansal, P.; Boyles, S.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnan, D.; Helsel, J. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks; Final Report; Texas Department of Transportation: Austin, TX, USA, 2016.
- Şentürk, M.; Uygan, I.M.C.; Güvenc, L. Mixed cooperative adaptive cruise control for light commercial vehicles. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 1506–1511. [Google Scholar]
- Zhao, L.; Sun, J. Simulation framework for vehicle platooning and car-following behaviors under connected-vehicle environment. Procedia Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- Hidas, P. Modelling lane changing and merging in microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 2002, 10, 351–371. [Google Scholar] [CrossRef]
- Hwang, S.Y.; Park, C.H. Modeling of the gap acceptance behavior at a merging section of urban freeway. In Proceedings of the Eastern Asia Society for Transportation Studies, Tokyo, Japan, 26 October 2005; Eastern Asia Society for Transportation (EASTS): Tokyo, Japan, 2005; p. e1656. [Google Scholar]
- Gipps, P.G. A model for the structure of lane-changing decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Sparmann, U. Spurwechselvorgänge auf Zweispurigen BAB-Richtungsfahrbahnen; Bundesminister für Verkehr, Abt. Straßenbau: Berlin, Germany, 1978. [Google Scholar]
- Jones, S.L.; Sullivan, A.J.; Cheekoti, N.; Anderson, M.D.; Malave, D. Traffic Simulation Software Comparison Study; UTCA Report 02217; University Transportation Center for Alabama: Tuscaloosa, AL, USA, 2004. [Google Scholar]
- Zhang, Y. Scalability of Car-Following and Lane-Changing Models in Microscopic Traffic Simulation Systems. Master’s Thesis, Louisiana State University, Baton Rouge, LA, USA, 2004. [Google Scholar]
- Soria, I.; Elefteriadou, L.; Kondyli, A. Assessment of car-following models by driver type and under different traffic, weather conditions using data from an instrumented vehicle. Simul. Model. Pract. Theory 2014, 40, 208–220. [Google Scholar] [CrossRef]
- Fritzsche, H.-T. A model for traffic simulation. Traffic Eng. Control 1994, 35, 317–321. [Google Scholar]
- Fyfe, M.R. Safety Evaluation of Connected Vehicle Applications Using Micro-Simulation. Master’s Thesis, University of British Columbia, Vancouver, BC, Canada, 2016. [Google Scholar]
- Fransson, E. Driving Behavior Modeling and Evaluation of Merging Control Strategies—A Microscopic Simulation Study on Sirat Expressway. Master’s Thesis, Linköping University, Linkoping, Sweden, 2018. [Google Scholar]
- Sukennik, P.; Zeidler, V.; Etten, J.V. CoEXist Deliverable D 2.6 Technical Report on Data Collection and Validation; Linköping University: Linköping, Sweden, 2018. [Google Scholar]
- Zeidler, V.; Buck, H.S.; Kautzsch, L.; Vortisch, P.; Weyland, C.M. Simulation of Autonomous Vehicles Based on Wiedemann’s Car Following Model in PTV Vissim. In Proceedings of the 2019 98th Annual Meeting of the Transportation Research Board (TRB), Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Research on the Impacts of Connected and Autonomous Vehicles (CAVs) on Traffic Flow, Summary Report, Department for Transport; ATKINS: Epsom, UK, 2016.
- Sukennik, P.; Lohmiller, J.; Schlaich, J. Simulation-Based Forecasting the Impacts of Autonomous Driving. In Proceedings of the International Symposium of Transport Simulation (ISTS’18) and the International Workshop on Traffic Data Collection and its Standardization (IWTDCS’18), Ehime, Japan, 3 August 2018. [Google Scholar]
- Rupprecht, S.; Backhaus, W.; Gyergyay, B.; Gomari, S. CoEXist Deliverable D1. 1 Automation Ready Framework. 2018. Available online: https://www.h2020-coexist.eu/automation-ready-framework-2/ (accessed on 1 February 2021).
- Sukennik, P.; Micro-Simulation Guide for Automated Vehicles—Final. Deliverable 2.11 of the CoEXist Project. 2020. Available online: https://www.h2020-coexist.eu/wp-content/uploads/2020/04/D2.11-Guide-for-the-simulation-of-AVs-with-microscopic-modelling-tool-Final.pdf (accessed on 1 February 2021).
- Essa, M.; Sayed, T. Simulated traffic conflicts: Do they accurately represent field-measured conflicts? Transp. Res. Rec. 2015, 2514, 48–57. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [Green Version]
- PTV Group. PTV VISSIM 2020 Introduction to the COM API; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]
- PTV Group. PTV VISSIM 2020 Driver Model DLL—Interface Documentation; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]
- PTV Group. PTV VISSIM 2020 Driver Model DLL—Driving Simulator Interface Documentation; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]


| Model Class | Model Logic and Assumption |
|---|---|
| Gazis-Herman-Rothery (GHR) model | “The following vehicles’ acceleration is proportional to the subjected vehicle (own vehicle), the speed difference between the follower and the leader, and the space headway.” |
| Safety-distance model | “The follower always keeps a safe distance to the vehicle ahead” |
| Psychophysical car-following model | “These models use threshold values.” Drivers react to vehicles when the set threshold for relative velocity (speed difference between a follower and a lead vehicle) or spacing is reached. |
| Parameter | Description | Value |
|---|---|---|
| AXadd | Additive calibration parameter | 1.25 (m) |
| AXmult | Multiplicative calibration parameter | 2.5 (m) |
| BXadd | Additive calibration parameter | 2.0 (m) |
| BXmult | Multiplicative calibration parameter | 1.0 (m) |
| EXadd | Additive calibration parameter | 1.5 (m) |
| EXmult | Multiplicative calibration parameter | 0.55 (m) |
| OPDVadd | Additive calibration parameter | 1.5 |
| OPDVmult | Multiplicative calibration parameter | 1.5 |
| CX | Calibration Parameter | 40 * |
| BNULLmult | Multiplicative calibration parameter | 0.1 (m/s2) |
| NRND | Normally distributed random number | N (0.5, 0.15) ** |
| RND1 | Normally distributed driver number | N (0.5, 0.15) ** |
| RND2 | Normally distributed driver number | N (0.5, 0.15) ** |
| RND4 | Normally distributed driver number | N (0.5, 0.15) ** |
| Bmax | Maximum acceleration | *** |
| Bmin | Maximum deceleration | *** |
| Mandatory Lane-Change | Discretionary Lane-Change |
|---|---|
| The current lane is blocked for a specific vehicle type. | The driver overtakes another slow-moving or heavy vehicle. |
| The current lane will drop by merging into another lane. | A driver yields its way to provide a safe gap for another merging vehicle. |
| The driver must change a lane to reach the desired destination. |
| Variable | Description | Default Value | |
|---|---|---|---|
| Thresholds for Safety Distance ( | CC0 | Standstill distance: desired minimum distance between the two standing vehicles (lead and following) at v = 0 [mph]. The value for this parameter is fixed. | 4.92 ft (1.5 m) |
| CC1 | Headway time (Gap): Desired time in seconds between the two vehicles (lead and following). The higher the value, the more cautious the driver is. Thus, at a given speed v [mph], the safety distance dx_safe is computed to: dx_safe = CC0 + CC1 × v. The safety distance is defined in the model as the minimum distance a driver will keep while following another car. In the case of high volumes, this distance highly influences the capacity of the network. | 0.90 s | |
| CC2 | Following variation: this is an added value to a safe distance. Restricts the longitudinal oscillation (distance difference) as a driver moves closer to the car ahead. Hence if this value is set to 30 ft, the following distance will be dx_safe and dx_safe + 30 ft. The default value is 13.12 ft which results in a quite stable following process | 13.12 ft (4.0 m) | |
| CC3 | Threshold for entering “Following” state: time in seconds before a vehicle starts to decelerate in order to reach the required safety distance (negative). Hence, it defines the number of seconds a driver needed to decelerate earlier reaching the safety distance (dx_safe). | −8.00 s | |
| Thresholds for Speed () | CC4 | Negative “Following” Threshold: defines a negative speed variation between the following process. This parameter controls the speed differences of Wiedemann’s “following-state”. A smaller value generates a more sensitive driving behavior to the acceleration or deceleration of the preceding vehicle. The default value models a potentially tight following condition for the following drivers. | −0.35 ft/s |
| CC5 | Positive “Following Threshold”: defines a positive speed variation between the following process. This parameter controls the speed differences of Wiedemann’s “following-state”. A smaller value generates a more sensitive driving behavior to the acceleration or deceleration of the preceding vehicle. The default value models a potentially tight following condition for the following drivers. | 0.35 ft/s | |
| CC6 | Speed dependency of oscillation: influence of distance on speed oscillation. If set to 0, the speed oscillation is independent of the distance. Whereas larger values, lead to a greater speed oscillation with increasing distances. | 11.44 | |
| Acceleration Rates | CC7 | Oscillation Acceleration: minimum acceleration/deceleration during the following process. | 0.82 ft/s2 |
| CC8 | Standstill acceleration: desired acceleration when starting from a standstill (limited by maximum acceleration defined within acceleration curves). | 11.48 ft/s2 | |
| CC9 | Acceleration at 50 mph (80 km/h): desired acceleration at 50 mph (limited by maximum acceleration defined within acceleration curves) | 4.92 ft/s2 | |
| Parameters | Explanation |
|---|---|
| General behavior | Defines the behavior for overtaking by two methods such as (1) free lane selection in which vehicles can overtake on each lane, (2) slow-lane rule, which allows overtaking on freeways. |
| Necessary lane change (route) | This parameter is subdivided into two columns for its own (subject) vehicle and a trailing (target) vehicle. It consists of three sub-components. The deceleration thresholds for the own and trailing vehicle are defined to adjust the aggressiveness of the necessary lane-change [55]. The “maximum deceleration” (upper bound value) and “acceptable deceleration” (lower bound value) are the limits of deceleration value while performing a lane change. The “−1 m/s2 per distance” is the reduction rate that defines the pace at which the maximum deceleration will reduce with the increasing distance from the emergency stop distance. |
| Waiting time before diffusion | When a vehicle requires to make a mandatory lane change in a congested road network to follow its desired route (when no acceptable lane-change gap is available), it comes to a halt (emergency stop), and it waits until a suitable gap for lane-change is available. VISSIM defines a threshold for the maximum amount of time a vehicle can wait at the emergency stop before making a lane-change. If the vehicle is not successful in this defined period, it is removed from the network (disappear from the simulation). VISSIM will generate a warning message (about the removal of a vehicle) when the simulation period is completed. In this way a network would not choke because of certain vehicle which comes to a halt. |
| Minimum clearance | The minimum distance that must be available between the lead and preceding vehicles after a lane-change. |
| Safety distance reduction factor | A drop in the safety distances for vehicles involved in lane-change maneuvers. Smaller the value, more aggressive lane-change. |
| Maximum deceleration for cooperative breaking | Defines the maximum deceleration which the trailing vehicle would accept to help the maneuver of lane-changing vehicles. |
| Cooperative lane-change | Through the use of this option, the trailing vehicle in the target lane would move to another side of a lane and providing room for lane change-vehicle. |
| Parameter | Autonomous CACC (Communication with the Leader) | Autonomous dCACC (No Communication with Leader) |
|---|---|---|
| CC0 | 4 (m) | 6 (m) |
| CC1 | 0.3, 0.6, 1.0 (s) | 1.0 (s) |
| CC2 | 0 (m) | 0 (m) |
| CC3 | −40 (s) | −40 (s) |
| CC4 | 0 (m/s) | 0 (m/s) |
| CC5 | 0 (m/s) | 0 (m/s) |
| CC6 | 0 | 0 |
| CC7 | 0.25 (m/s2) | 0.25 (m/s2) |
| CC8 | 3.5 (m/s2) | 3.5 (m/s2) |
| CC9 | 1.5 (m/s2) | 1.5 (m/s2) |
| Capability Levels | CC0 (m) | CC1 (s) | CC7 (m/s2) | CC8 (m/s2) | CC9 (m/s2) | Min. Clearance or Headway (front/rear) (m) | Safety Distance Reduction Factor | User-Defined Minimum Time-Gap (s) | User-Defined Minimum Clearance or Headway (m) | |
|---|---|---|---|---|---|---|---|---|---|---|
| Level 2 | 1.5 | 0.9 | 0.25 | 3.5 | 1.5 | 0.5 | 60% | 3 | 5 | |
| Level 3 | Cautious | 2.5 | 1.8 | 0.1 | 3.2 | 1.2 | 0.8 | 90% | 3.6 | 6.5 |
| Normal cautious | 2 | 1.2 | 0.2 | 3.4 | 1.4 | 0.6 | 70% | 3.2 | 5.5 | |
| Normal assertive | 1 | 0.8 | 0.3 | 3.6 | 1.6 | 0.4 | 50% | 2.8 | 4.5 | |
| Assertive | 0.5 | 0.6 | 0.4 | 3.8 | 1.8 | 0.2 | 30% | 2.4 | 3.5 | |
| Level 4 * | 0.5 | 0.6 | 0.4 | 3.8 | 1.8 | 0.2 | 30% | 2.4 | 3.5 | |
| Driving Parameters | CoEXist AV-Ready Driving Behaviors * | ||
|---|---|---|---|
| AV Cautious (CoEXist) | AV Normal (CoEXist) | AV Aggressive (CoEXist) | |
| Following behavior | |||
| Max look ahead distance (m) | 250.0 | 250.0 | 300.0 |
| Number of interaction objects | 2 | 2 | 10 |
| Number of interaction vehicles | 1 | 1 | 8 |
| Car-following (Wiedemann 99) | |||
| CC0 (m) | 1.5 | 1.5 | 1.0 |
| CC1 (s) | 1.5 | 0.9 | 0.6 |
| CC3 (s) | −10.0 | −8.0 | −6.0 |
| CC8 (m/s2) | 3.0 | 3.5 | 4.0 |
| CC9 (m/s2) | 1.20 | 1.5 | 2.0 |
| Lane-change | |||
| Necessary lane change—max deceleration (m/s2) for own vehicle | −3.5 | −4.0 | −4.0 |
| Necessary lane change—max deceleration (m/s2) for trailing vehicle | −2.5 | −3.0 | −4.0 |
| Necessary lane change—1 m/s2 per distance (m) | 80 | 100 | 100 |
| Necessary lane change—accepted deceleration (m/s2) for own vehicle | −1.0 | −1.0 | −1.0 |
| Necessary lane change—accepted deceleration (m/s2) for trailing vehicle | −1.0 | −1.0 | −1.5 |
| Safety distance reduction factor | 1.0 | 0.6 | 0.75 |
| Max deceleration for cooperative braking (m/s2) | −2.5 | −3.0 | −6.0 |
| Cooperative merging | No | Yes | Yes |
| Autonomous driving | |||
| Enforce absolute braking distance | Yes | No | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, H.U.; Huang, Y.; Lu, P. A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities 2021, 4, 314-335. https://doi.org/10.3390/smartcities4010019
Ahmed HU, Huang Y, Lu P. A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities. 2021; 4(1):314-335. https://doi.org/10.3390/smartcities4010019
Chicago/Turabian StyleAhmed, Hafiz Usman, Ying Huang, and Pan Lu. 2021. "A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation" Smart Cities 4, no. 1: 314-335. https://doi.org/10.3390/smartcities4010019
APA StyleAhmed, H. U., Huang, Y., & Lu, P. (2021). A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities, 4(1), 314-335. https://doi.org/10.3390/smartcities4010019