
Application of Deep Learning on UAV-Based Aerial Images for Flood Detection





Abstract
:1. Introduction and Background
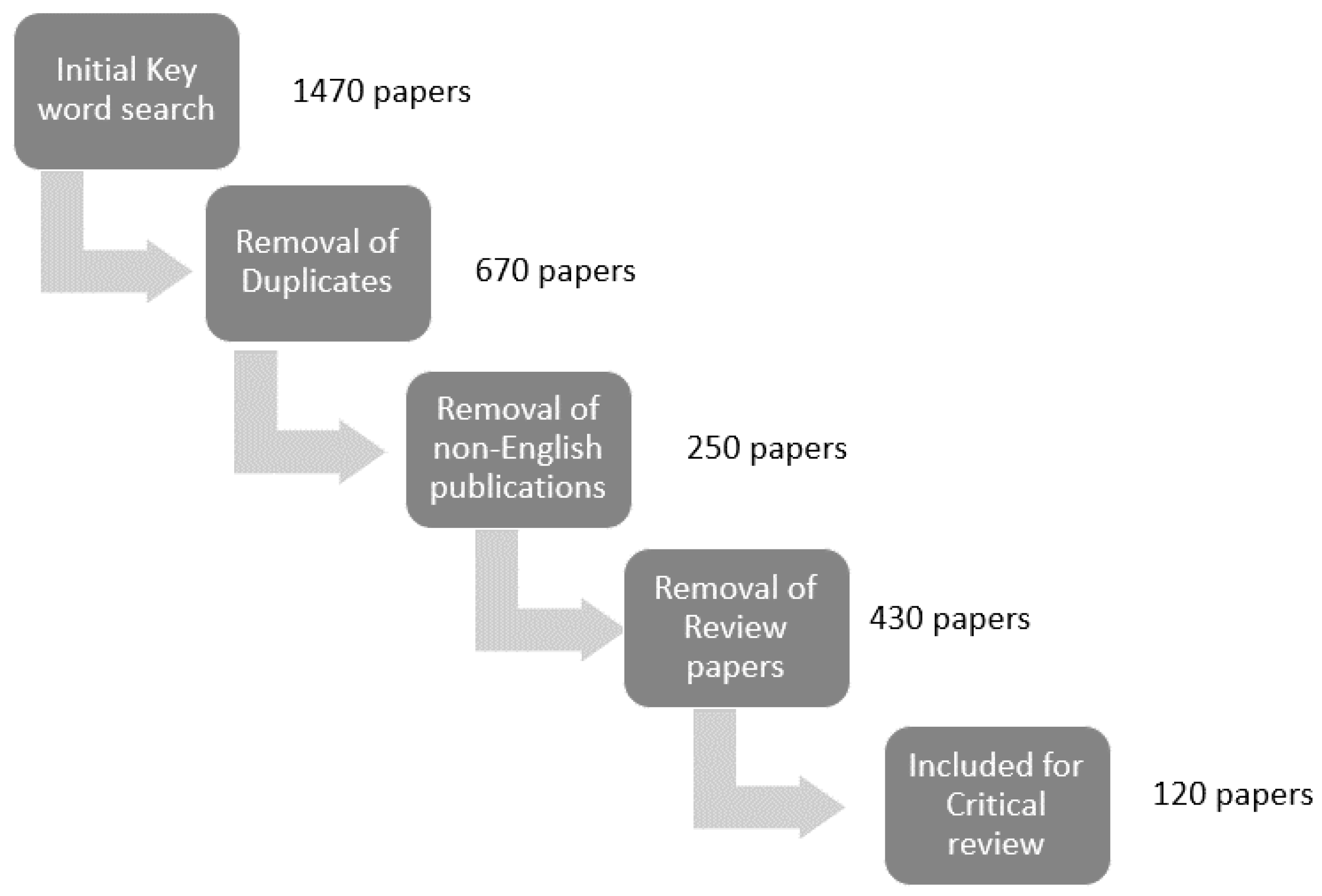
2. Research Methodology
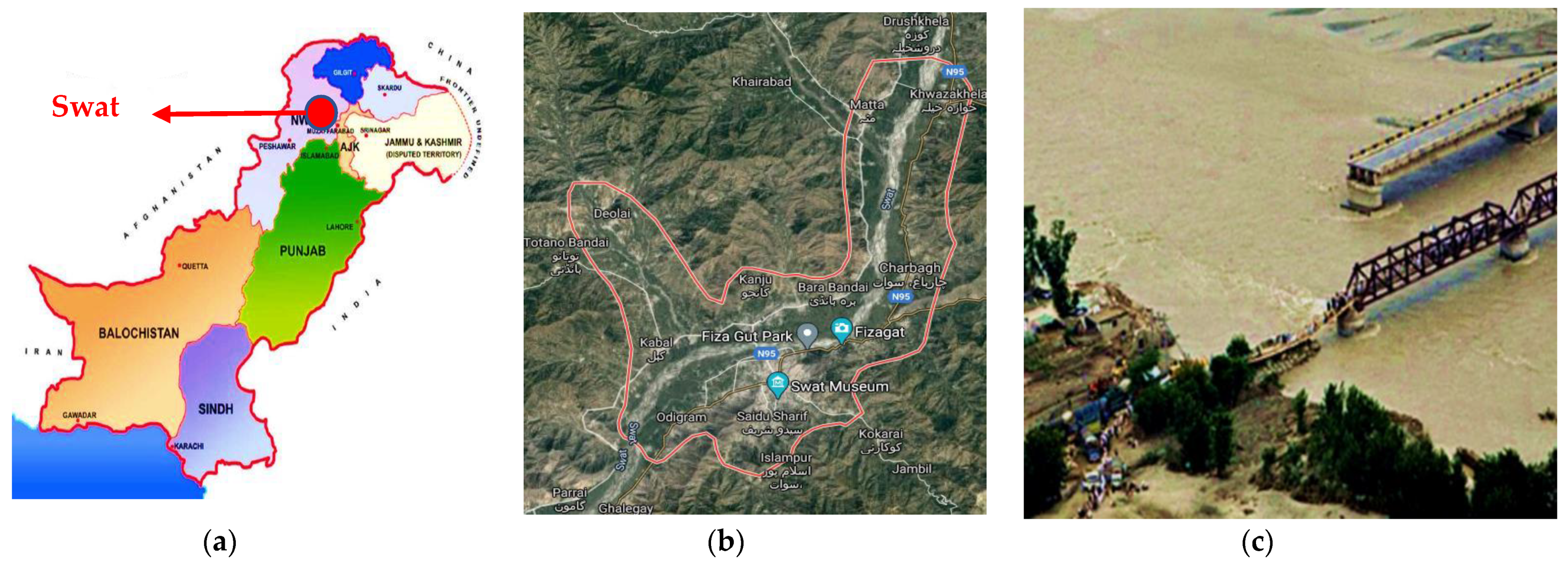
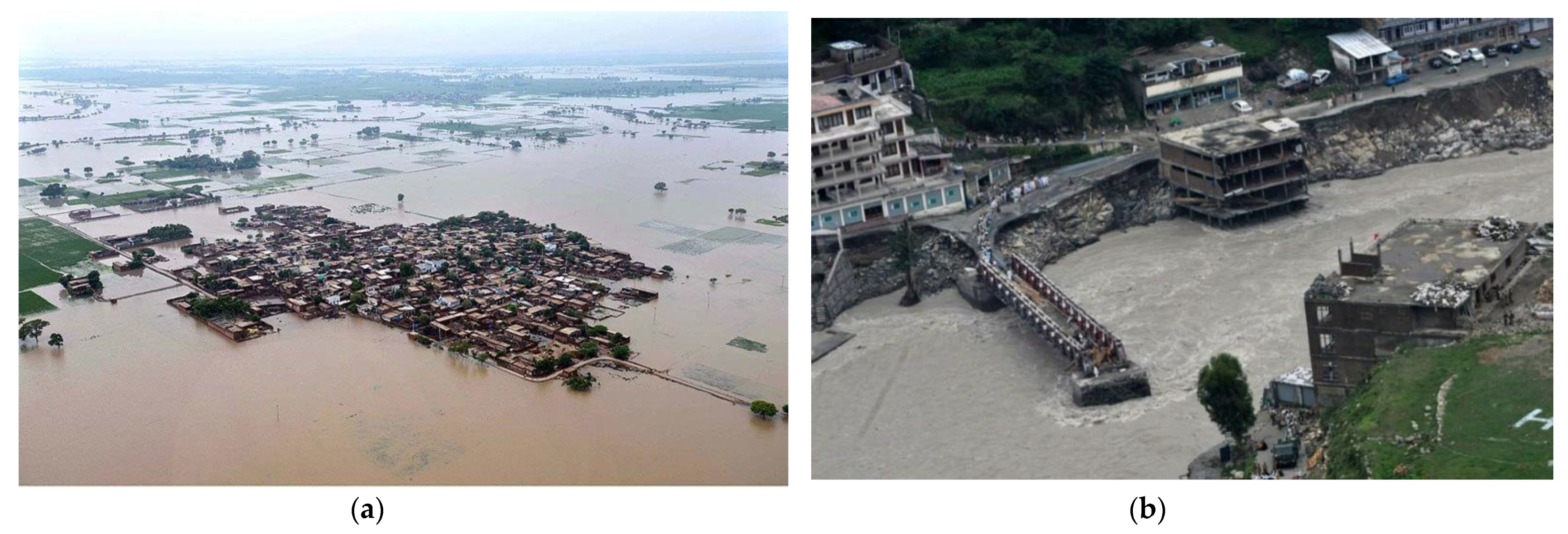
2.1. Case Study Area
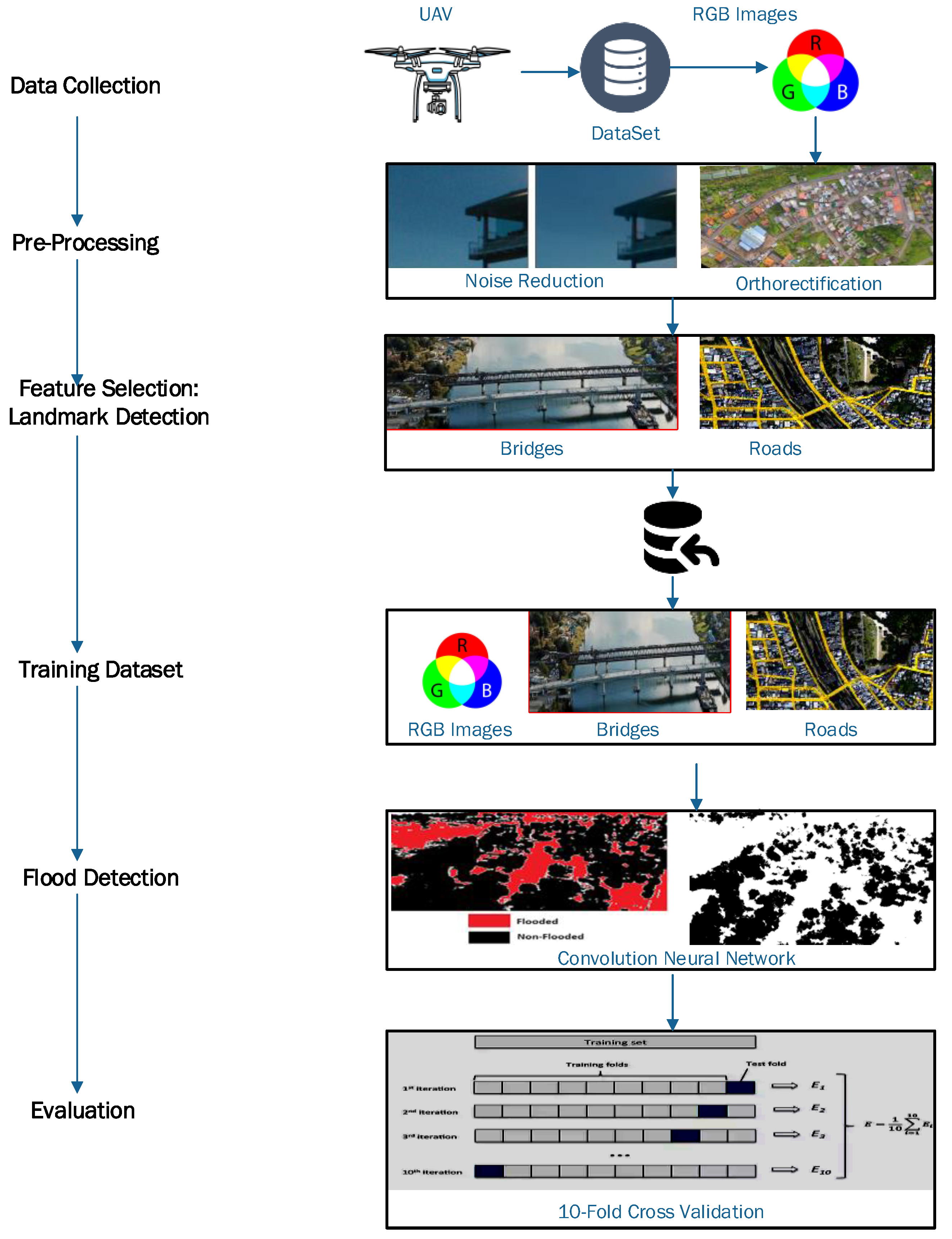
2.2. Proposed System Workflow
- Image acquisition and data collection using UAV;
- Preprocessing of the images;
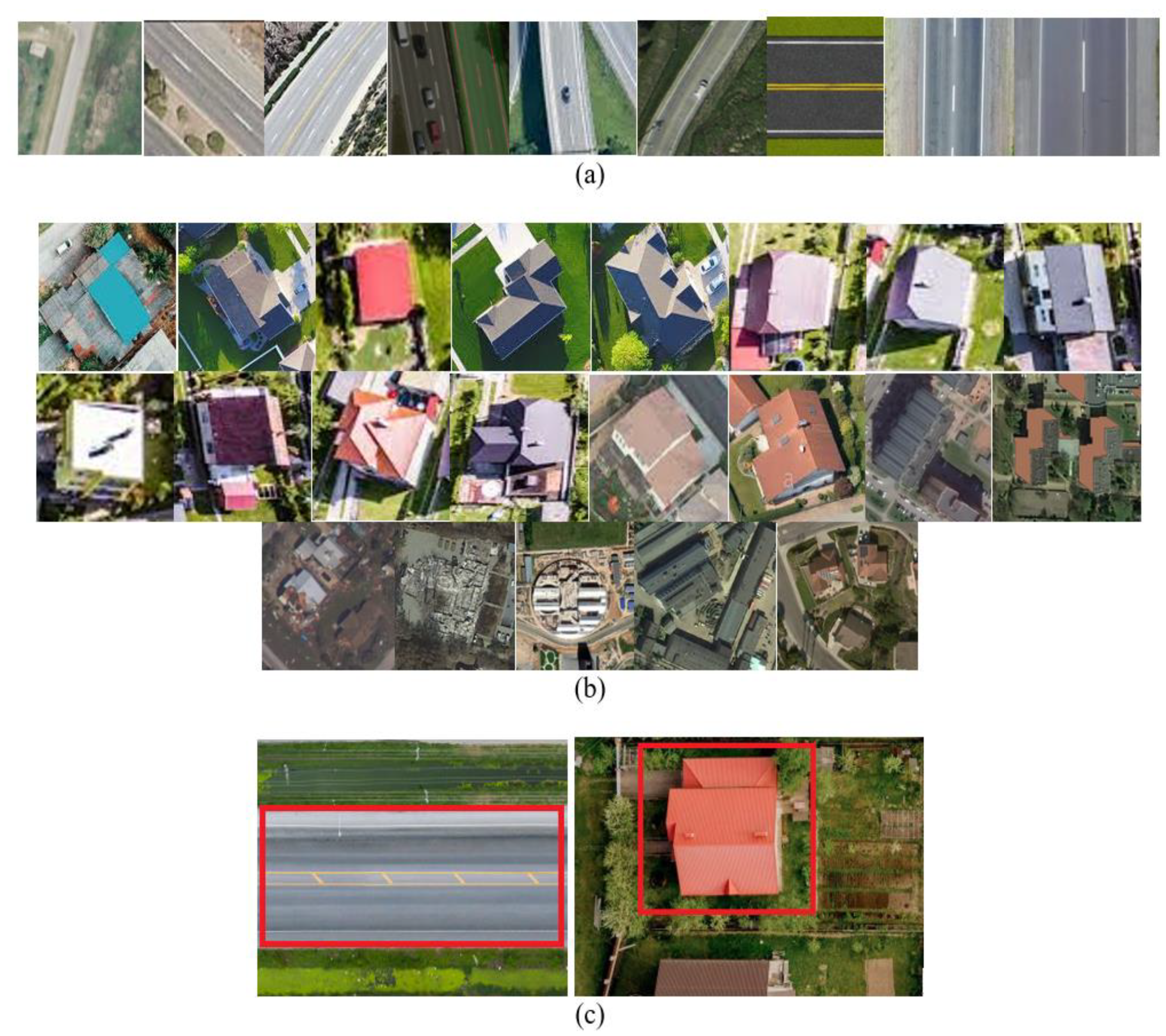
- Selection of landmarks features for detection;
- Training the model on the dataset;
- Flood detection using image classification;
- Performance evaluation of the proposed system.
2.2.1. Image Acquisition
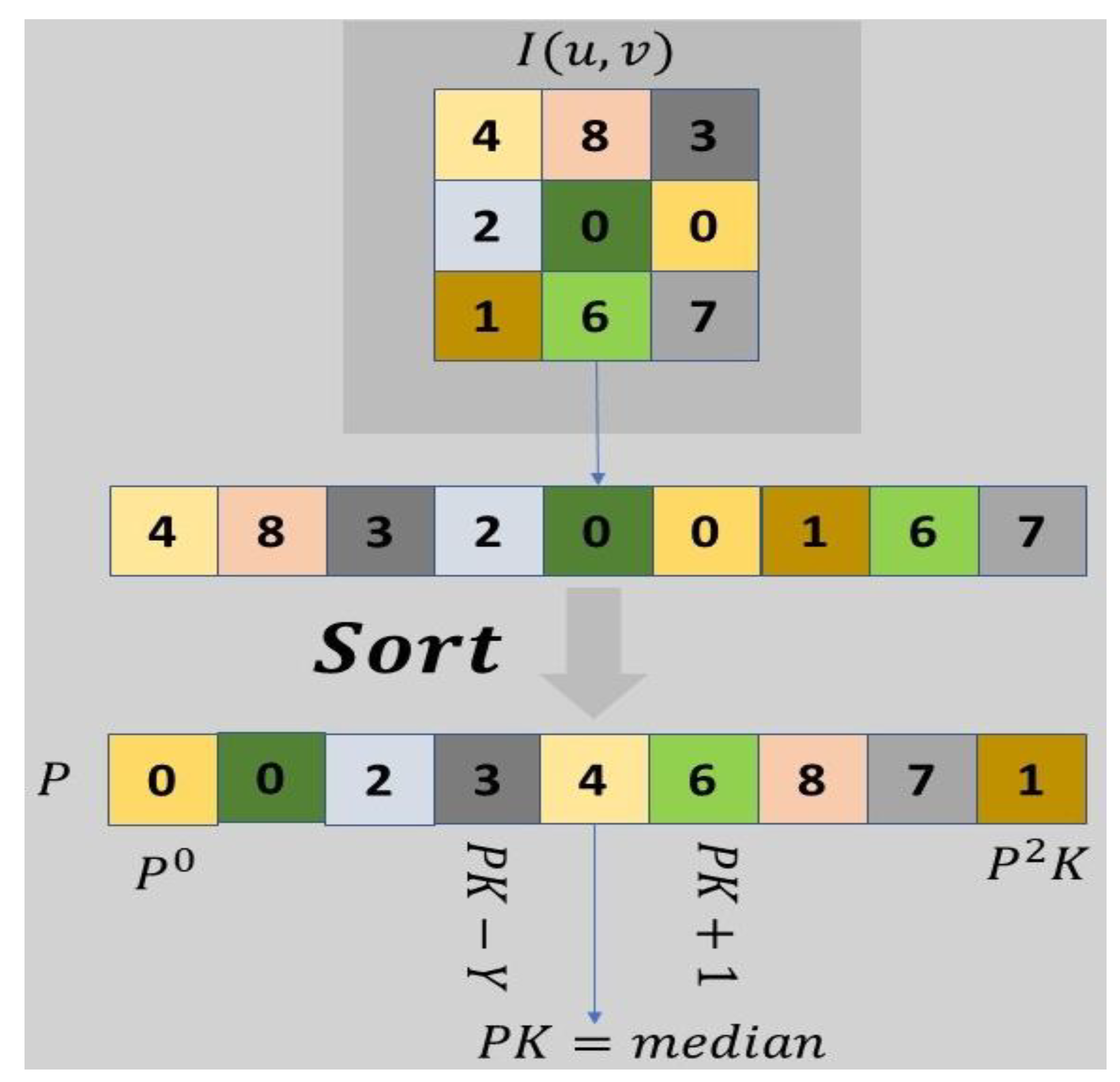
2.2.2. Preprocessing
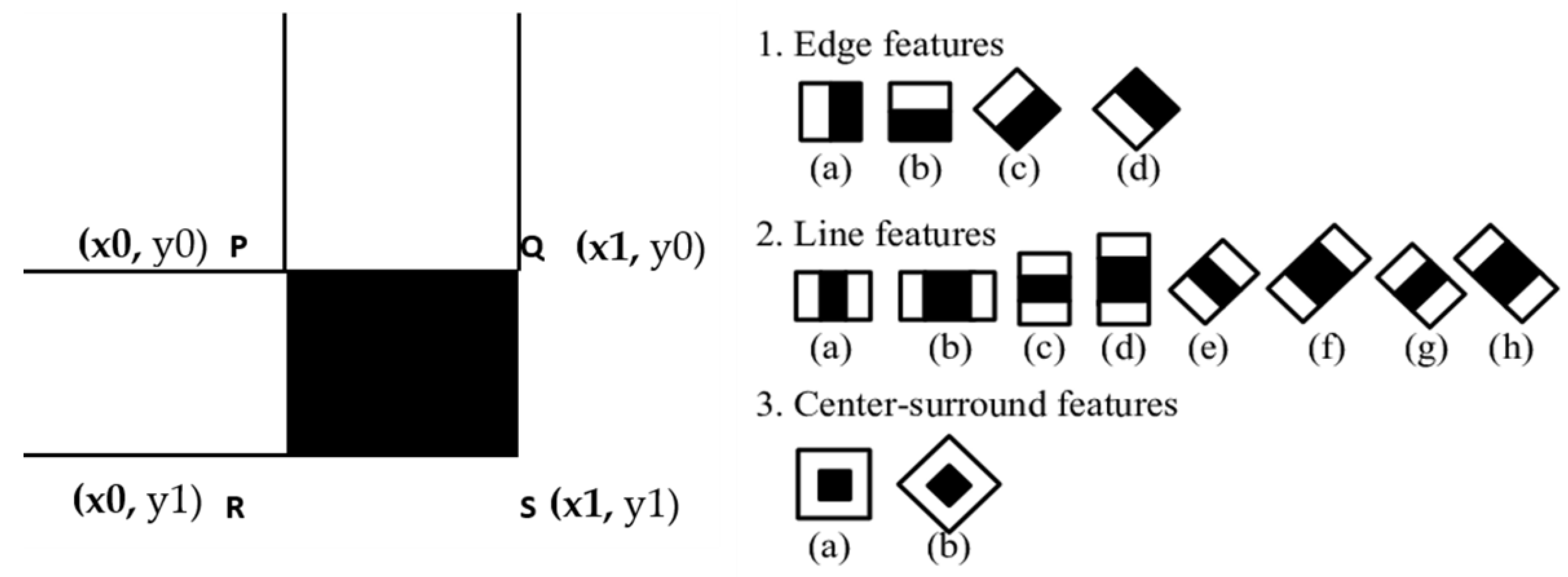
2.2.3. Selection of Landmarks Features for Detection
2.2.4. Training Datasets
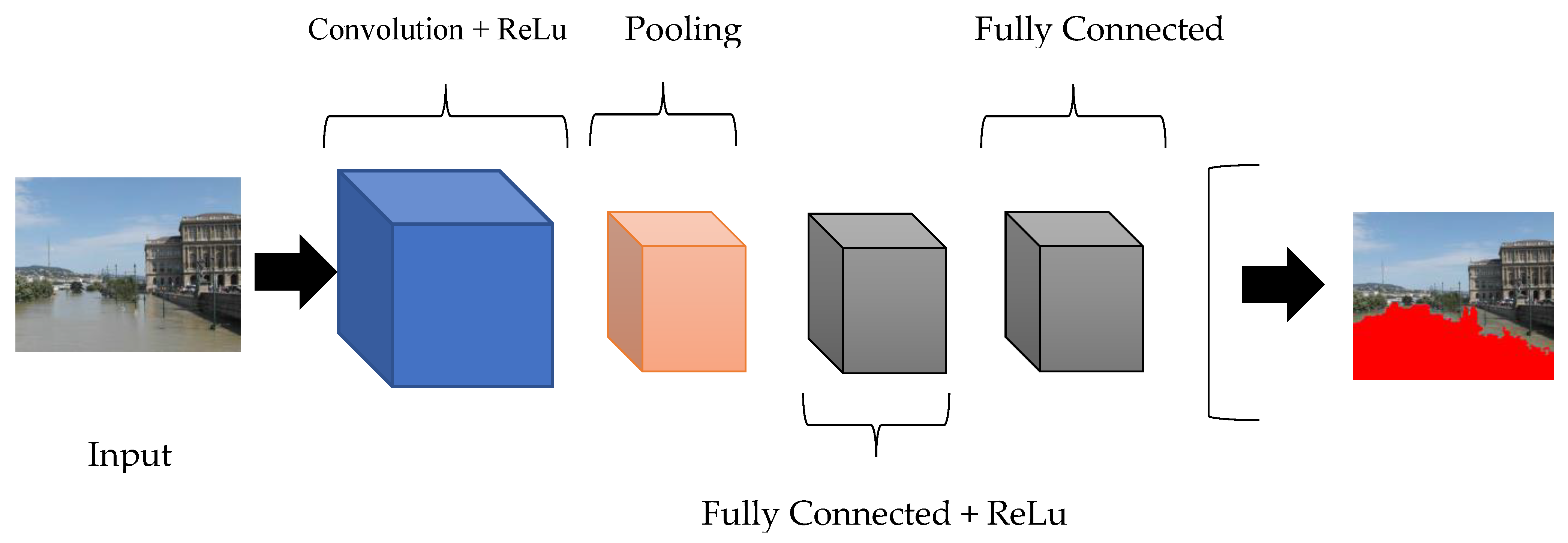
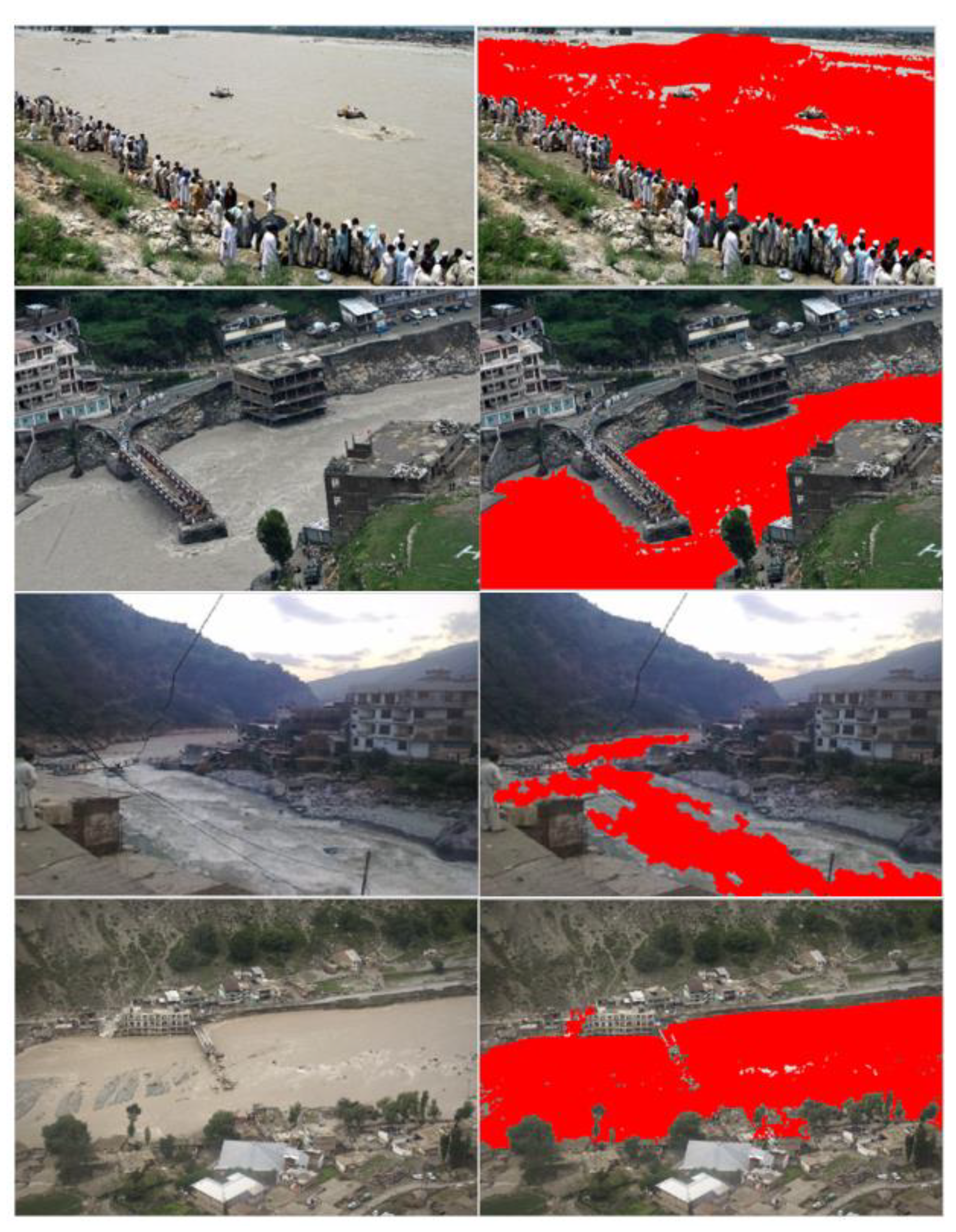
2.2.5. Flood Detection Using Image Classification
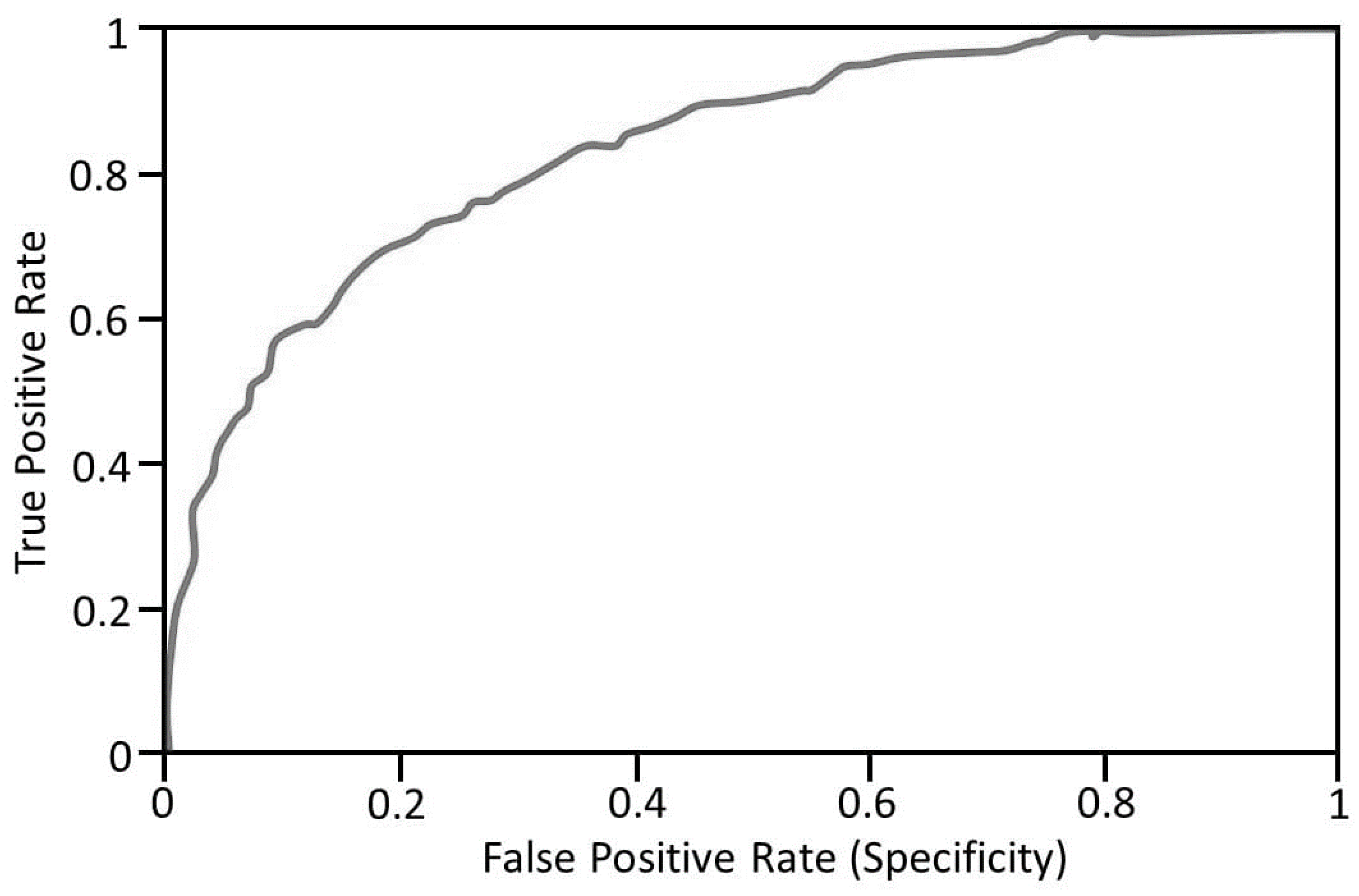
2.2.6. Results Extraction and Performance Evaluation of the Proposed System
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Garavaglia, A.M. Disaster Preparedness and Recovery: How Arts Organizations Can Help Re-engage the Community through Arts-Driven Initiatives after a Natural or Human-Made Disaster. Master’s Thesis, Drexel University, Philadelphia, PA, USA, 2019. [Google Scholar]
- Munawar, H.S.; Hammad, A.; Ullah, F.; Ali, T.H. After the flood: A novel application of image processing and machine learning for post-flood disaster management. In Proceedings of the 2nd International Conference on Sustainable Development in Civil Engineering (ICSDC 2019), Jamshoro, Pakistan, 5–7 December 2019. [Google Scholar]
- Lenderink, G.; Van Meijgaard, E. Increase in hourly precipitation extremes beyond expectations from temperature changes. Nat. Geosci. 2008, 1, 511–514. [Google Scholar] [CrossRef]
- Ashley, S.T.; Ashley, W.S. Flood fatalities in the United States. J. Appl. Meteorol. Climatol. 2008, 47, 805–818. [Google Scholar] [CrossRef]
- Ptak, M.; Konarzewski, K. Numerical Technologies for Vulnerable Road User Safety Enhancement, in New Contributions in Information Systems and Technologies; Springer: Berlin/Heidelberg, Germany, 2015; pp. 355–364. [Google Scholar]
- Van Ree, C.C.D.F.; Van, M.; Heilemann, K.; Morris, M.W.; Royet, P.; Zevenbergen, C. FloodProBE: Technologies for improved safety of the built environment in relation to flood events. Environ. Sci. Policy 2011, 14, 874–883. [Google Scholar] [CrossRef]
- Arrighi, C.; Pregnolato, M.; Dawson, R.J.; Castelli, F. Preparedness against mobility disruption by floods. Sci. Total Environ. 2019, 654, 1010–1022. [Google Scholar] [CrossRef]
- Guha-Sapir, D.; Below, R.; Hoyois, P. EM-DAT: International Disaster Database; Université Catholique de Louvain: Brussels, Belgium, 2015. [Google Scholar]
- Qayyum, S.; Ullah, F.; Al-Turjman, F.; Mojtahedi, M. Managing smart cities through six sigma DMADICV method: A review-based conceptual framework. Sustain. Cities Soc. 2021, 72, 103022. [Google Scholar] [CrossRef]
- Ullah, F.; Sepasgozar, S.M.; Thaheem, M.J.; Al-Turjman, F. Barriers to the digitalisation and innovation of Australian smart real estate: A managerial perspective on the technology non-adoption. Environ. Technol. Innov. 2021, 22, 101527. [Google Scholar] [CrossRef]
- Ullah, F.; Qayyum, S.; Thaheem, M.J.; Al-Turjman, F.; Sepasgozar, S.M. Risk management in sustainable smart cities governance: A TOE framework. Technol. Forecast. Soc. Chang. 2021, 167, 120743. [Google Scholar] [CrossRef]
- Munawar, H.S.; Qayyum, S.; Ullah, F.; Sepasgozar, S. Big data and its applications in smart real estate and the disaster management life cycle: A systematic analysis. Big Data Cogn. Comput. 2020, 4, 4. [Google Scholar] [CrossRef] [Green Version]
- Ullah, F.; Sepasgozar, S.M.; Wang, C. A systematic review of smart real estate technology: Drivers of, and barriers to, the use of digital disruptive technologies and online platforms. Sustainability 2018, 10, 3142. [Google Scholar] [CrossRef] [Green Version]
- Felli, F.; Liu, C.; Ullah, F.; Sepasgozar, S. Implementation of 360 videos and mobile laser measurement technologies for immersive visualisation of real estate & properties. In Proceedings of the 42nd AUBEA Conference, Singapore, 26–28 September 2018. [Google Scholar]
- Low, S.; Ullah, F.; Shirowzhan, S.; Sepasgozar, S.M.; Lee, C.L. Smart digital marketing capabilities for sustainable property development: A case of Malaysia. Sustainability 2020, 12, 5402. [Google Scholar] [CrossRef]
- Ullah, F.; Sepasgozar, S.M. Key factors influencing purchase or rent decisions in smart real estate investments: A system dynamics approach using online forum thread data. Sustainability 2020, 12, 4382. [Google Scholar] [CrossRef]
- Ullah, F.; Sepasgozar, S.M.; Shirowzhan, S.; Davis, S. Modelling users’ perception of the online real estate platforms in a digitally disruptive environment: An integrated KANO-SISQual approach. Telemat. Inform. 2021, 63, 101660. [Google Scholar] [CrossRef]
- Ullah, F.; Sepasgozar, S.M.; Thaheem, M.J.; Wang, C.C.; Imran, M. It’s all about perceptions: A DEMATEL approach to exploring user perceptions of real estate online platforms. Ain Shams Eng. J. 2021. [Google Scholar] [CrossRef]
- Ward, P.J.; Jongman, B.; Kummu, M.; Dettinger, M.D.; Weiland, F.C.S.; Winsemius, H.C. Strong influence of El Niño Southern Oscillation on flood risk around the world. Proc. Natl. Acad. Sci. USA 2014, 111, 15659–15664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lindenschmidt, K.-E. Quasi-2D approach in modeling the transport of contaminated sediments in floodplains during river flooding—model coupling and uncertainty analysis. Environ. Eng. Sci. 2008, 25, 333–352. [Google Scholar] [CrossRef] [Green Version]
- Atif, S.; Umar, M.; Ullah, F. Investigating the flood damages in Lower Indus Basin since 2000: Spatiotemporal analyses of the major flood events. Nat. Hazards 2021, 108, 2357–2383. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Khan, S.I.; Qadir, Z.; Qayyum, S. UAV assisted spatiotemporal analysis and management of bushfires: A case study of the 2020 victorian bushfires. Fire 2021, 4, 40. [Google Scholar] [CrossRef]
- Khamespanah, F.; Delavar, M.R.; Moradi, M.; Sheikhian, H. A GIS-based multi-criteria evaluation framework for uncertainty reduction in earthquake disaster management using granular computing. Geod. Cartogr. 2016, 42, 58–68. [Google Scholar] [CrossRef] [Green Version]
- Aslam, B.; Maqsoom, A.; Khalid, N.; Ullah, F.; Sepasgozar, S. Urban overheating assessment through prediction of surface temperatures: A case study of karachi, Pakistan. ISPRS Int. J. Geo-Inf. 2021, 10, 539. [Google Scholar] [CrossRef]
- Sowmya, K.; John, C.; Shrivasthava, N. Urban flood vulnerability zoning of Cochin City, southwest coast of India, using remote sensing and GIS. Nat. Hazards 2015, 75, 1271–1286. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y. GIS-based dynamic modelling and analysis of flash floods considering land-use planning. Int. J. Geogr. Inf. Sci. 2017, 31, 481–498. [Google Scholar] [CrossRef]
- Sam Khaniani, A.; Nikraftar, Z.; Zakeri, S. Evaluation of MODIS Near-IR water vapor product over Iran using ground-based GPS measurements. Atmos. Res. 2020, 231, 104657. [Google Scholar] [CrossRef]
- Akbar, Y.M.; Musafa, A.; Riyanto, I. Image processing-based flood detection for online flood early warning system. In Proceedings of the 6th Indonesian-Japan Joint Scientific Symposium 2014, Yogyakarta, Indonesia, 29–30 October 2014. [Google Scholar]
- Cao, H.; Zhang, H.; Wang, C.; Zhang, B. Operational flood detection using Sentinel-1 SAR data over large areas. Water 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- Al-Wassai, F.A.; Kalyankar, N. Major limitations of satellite images. J. Glob. Res. Comput. Sci. 2013, 4, 51–59. [Google Scholar]
- Hall, A.C.; Schumann, G.J.P.; Bamber, J.L.; Bates, P.D.; Trigg, M.A. Geodetic corrections to Amazon River water level gauges using ICESat altimetry. Water Resour. Res. 2012, 48, W06602. [Google Scholar] [CrossRef] [Green Version]
- Munawar, H.S.; Zhang, J.; Li, H.; Mo, D.; Chang, L. Mining multispectral aerial images for automatic detection of strategic bridge locations for disaster relief missions. In Pacific-Asia Conference on Knowledge Discovery and Data Mining; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Munawar, H.S.; Maqsood, A.; Mustansar, Z. Isotropic surround suppression and Hough transform based target recognition from aerial images. Int. J. Adv. Appl. Sci. 2017, 4, 37–42. [Google Scholar] [CrossRef]
- Anusha, N.; Bharathi, B. Flood detection and flood mapping using multi-temporal synthetic aperture radar and optical data. Egypt. J. Remote Sens. Space Sci. 2020, 23, 207–219. [Google Scholar] [CrossRef]
- Mason, D.C.; Davenport, I.J.; Neal, J.C.; Schumann, G.J.-P.; Bates, P.D. Near real-time flood detection in urban and rural areas using high-resolution synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3041–3052. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, H.N.; Sheinfeld, G.; Chang, J.; Tabatabai, A.; Simmons, D. The tele-intensive care unit during a disaster: Seamless transition from routine operations to disaster mode. Telemed. E-Health 2011, 17, 746–749. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-based modelling from unmanned aerial vehicle (UAV) photogrammetry: An effective, low-cost tool for archaeological applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Langhammer, J.; Vacková, T. Detection and mapping of the geomorphic effects of flooding using UAV photogrammetry. Pure Appl. Geophys. 2018, 175, 3223–3245. [Google Scholar] [CrossRef]
- Rahnemoonfar, M.; Murphy, R.; Miquel, M.V.; Dobbs, D.; Adams, A. Flooded area detection from uav images based on densely connected recurrent neural networks. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Zakaria, S.; Mahadi, M.R.; Abdullah, A.F.; Abdan, K. Aerial platform reliability for flood monitoring under various weather conditions: A review. In GeoInformation for Disaster Management Conference; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Ullah, F.; Al-Turjman, F.; Qayyum, S.; Inam, H.; Imran, M. Advertising through UAVs: Optimized path system for delivering smart real-estate advertisement materials. Int. J. Intell. Syst. 2021, 36, 3429–3463. [Google Scholar] [CrossRef]
- Abbot, J.; Marohasy, J. Input selection and optimisation for monthly rainfall forecasting in Queensland, Australia, using artificial neural networks. Atmos. Res. 2014, 138, 166–178. [Google Scholar] [CrossRef]
- Sulaiman, J.; Wahab, S.H. Heavy rainfall forecasting model using artificial neural network for flood prone area. In IT Convergence and Security; Springer: Berlin/Heidelberg, Germany, 2017; pp. 68–76. [Google Scholar]
- Chang, L.-C.; Amin, M.Z.M.; Yang, S.-N.; Chang, F.-J. Building ANN-based regional multi-step-ahead flood inundation forecast models. Water 2018, 10, 1283. [Google Scholar] [CrossRef] [Green Version]
- Chang, M.-J.; Chang, H.-K.; Chen, Y.-C.; Lin, G.-F.; Chen, P.-A.; Lai, J.-S.; Tan, Y.-C. A support vector machine forecasting model for typhoon flood inundation mapping and early flood warning systems. Water 2018, 10, 1734. [Google Scholar] [CrossRef] [Green Version]
- Ofli, F.; Meier, P.; Imran, M.; Castillo, C.; Tuia, D.; Rey, N.; Briant, J.; Millet, P.; Reinhard, F.; Parkan, M. Combining human computing and machine learning to make sense of big (aerial) data for disaster response. Big Data 2016, 4, 47–59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ashrafi, M.; Chua, L.H.C.; Quek, C.; Qin, X. A fully-online Neuro-Fuzzy model for flow forecasting in basins with limited data. J. Hydrol. 2017, 545, 424–435. [Google Scholar] [CrossRef]
- Schlaffer, S.; Matgen, P.; Hollaus, M.; Wagner, W. Flood detection from multi-temporal SAR data using harmonic analysis and change detection. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 15–24. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood extent mapping for Namibia using change detection and thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- D’Addabbo, A.; Refice, A.; Pasquariello, G.; Lovergine, F.P.; Capolongo, D.; Manfreda, S. A Bayesian network for flood detection combining SAR imagery and ancillary data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3612–3625. [Google Scholar] [CrossRef]
- Widiasari, I.R.; Nugroho, L.E. Deep learning multilayer perceptron (MLP) for flood prediction model using wireless sensor network based hydrology time series data mining. In Proceedings of the 2017 International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 2–4 November 2017. [Google Scholar]
- Supratid, S.; Aribarg, T.; Supharatid, S. An integration of stationary wavelet transform and nonlinear autoregressive neural network with exogenous input for baseline and future forecasting of reservoir inflow. Water Resour. Manag. 2017, 31, 4023–4043. [Google Scholar] [CrossRef]
- Ullah, F.; Thaheem, M.J.; Siddiqui, S.Q.; Khurshid, M.B. Influence of Six Sigma on project success in construction industry of Pakistan. TQM J. 2017, 29, 1754–2731. [Google Scholar] [CrossRef]
- Sheikh, N.A.; Ullah, F.; Ayub, B.; Thaheem, M.J. Labor productivity assessment using activity analysis on semi high-rise building projects in Pakistan. Eng. J. 2017, 21, 273–286. [Google Scholar] [CrossRef]
- Ayub, B.; Ullah, F.; Rasheed, F.; Sepasgozar, S. Risks in EPC hydropower projects: A case of Pakistan. In Proceedings of the 8th International Civil Engineering Congress (ICEC) Ensuring Technological Advancement through Innovation Based Knowledge Corridor, Karachi, Pakistan, 23–24 December 2016. [Google Scholar]
- Maqsoom, A.; Khan, M.U.; Khan, M.T.; Khan, S.; Ullah, F. Factors influencing the construction time and cost overrun in projects: Empirical evidence from Pakistani construction industry. In Proceedings of the 21st International Symposium on Advancement of Construction Management and Real Estate; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Mehmood, Y.; Zahoor, H.; Ullah, F. Economic-efficiency analysis of rawalpindi bypass project: A case study. In Innovative Production and Construction: Transforming Construction Through Emerging Technologies; World Scientific: Singapore, 2019; pp. 531–555. [Google Scholar]
- Ullah, F.; Thaheem, M.J.; Sepasgozar, S.M.; Forcada, N. System dynamics model to determine concession period of PPP infrastructure projects: Overarching effects of critical success factors. J. Leg. Aff. Disput. Resolut. Eng. Constr. 2018, 10, 04518022. [Google Scholar] [CrossRef]
- Aslam, M. Flood management current state, challenges and prospects in Pakistan: A review. Mehran Univ. Res. J. Eng. Technol. 2018, 37, 297–314. [Google Scholar] [CrossRef] [Green Version]
- Rathor, H.R.; Nadeem, G.; Khan, I.A. Pesticide susceptibility status of Anopheles mosquitoes in four flood-affected districts of South Punjab, Pakistan. Vector-Borne Zoonotic Dis. 2013, 13, 60–66. [Google Scholar] [CrossRef] [PubMed]
- Hussain, A.; Routray, J.K. Status and factors of food security in Pakistan. Int. J. Dev. Issues 2012, 11, 1446–8956. [Google Scholar] [CrossRef]
- The Guardian, Pakistan Floods: At least 90 killed in monsoon rains. The Guardian, 26 August 2020. Available online: https://www.theguardian.com/world/2020/aug/26/pakistan-floods-at-least-90-killed-in-monsoon-rains (accessed on 6 October 2020).
- Khan, R. Flash Floods Triggered by Rain Kill 15 People in NW Pakistan. Washington Post, 2 September 2020. Available online: https://www.washingtonpost.com/world/asia_pacific/flash-floods-triggered-by-rain-kill-15-people-in-nw-pakistan/2020/09/02/7e12ccf0-ed05-11ea-bd08-1b10132b458f_story.html (accessed on 6 October 2020).
- Relief Web. Pakistan: Floods and Landslides—August 2020. Available online: https://reliefweb.int/disaster/fl-2020-000185-pak-0 (accessed on 6 October 2020).
- Bhandare, A.; Bhide, M.; Gokhale, P.; Chandavarkar, R. Applications of convolutional neural networks. Int. J. Comput. Sci. Inf. Technol. 2016, 7, 2206–2215. [Google Scholar]
- Chang, F.-l.; Huang, C.; Liu, C.; Zhao, Y.; Ma, C. Traffic sign detection based on Gaussian color model and SVM. Chin. J. Sci. Instrum. 2014, 35, 43–49. [Google Scholar]
- Zhang, W.; Tang, P.; Zhao, L. Remote sensing image scene classification using CNN-CapsNet. Remote Sens. 2019, 11, 494. [Google Scholar] [CrossRef] [Green Version]
- Ullah, F. A beginner’s guide to developing review-based conceptual frameworks in the built environment. Architecture 2021, 1, 3. [Google Scholar] [CrossRef]
- Qadir, Z.; Ullah, F.; Munawar, H.S.; Al-Turjman, F. Addressing disasters in smart cities through UAVs path planning and 5G communications: A systematic review. Comput. Commun. 2021, 168, 114–135. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2014; pp. 818–833. [Google Scholar]
- Feng, Q.; Liu, J.; Gong, J. Urban flood mapping based on unmanned aerial vehicle remote sensing and random forest classifier—A case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Pham, M.-T.; Cham, T.-J. Fast training and selection of haar features using statistics in boosting-based face detection. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007. [Google Scholar]
- Chung, B.W.; Park, K.-Y.; Hwang, S.-Y. A fast and efficient haar-like feature selection algorithm for object detection. J. Korean Inst. Commun. Inf. Sci. 2013, 38, 486–491. [Google Scholar]
- Tapia, E. A Note on the Computation of Haar-Based Features for High-Dimensional Images; Freie Universität Berlin, Institut für Informatik: Berlin, Germany, 2009. [Google Scholar]
- Zintgraf, L.M.; Cohen, T.S.; Adel, T.; Welling, M. Visualizing deep neural network decisions: Prediction difference analysis. arXiv 2017, arXiv:1702.04595. [Google Scholar]
- Simonyan, K. and A. Zisserman; Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NA, USA, 27–30 June 2016. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Elkhrachy, I. Flash flood hazard mapping using satellite images and GIS tools: A case study of Najran City, Kingdom of Saudi Arabia (KSA). Egypt. J. Remote Sens. Space Sci. 2015, 18, 261–278. [Google Scholar] [CrossRef] [Green Version]
- Tehrany, M.S.; Pradhan, B.; Mansor, S.; Ahmad, N. Flood susceptibility assessment using GIS-based support vector machine model with different kernel types. Catena 2015, 125, 91–101. [Google Scholar] [CrossRef]
- Bui, D.T.; Hoang, N.-D.; Martínez-Álvarez, F.; Ngo, P.-T.T.; Hoa, P.V.; Pham, T.D.; Samui, P.; Costache, R. A novel deep learning neural network approach for predicting flash flood susceptibility: A case study at a high frequency tropical storm area. Sci. Total Environ. 2020, 701, 134413. [Google Scholar]
- Lopez-Fuentes, L.; van de Weijer, J.; Bolanos, M.; Skinnemoen, H. Multi-modal deep learning approach for flood detection. MediaEval 2017, 17, 13–15. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Frequency (%) |
|---|---|
| Buildings | 30.1 |
| Roads | 42.8 |
| Soil | 11.9 |
| Grass | 10 |
| Water | 5.2 |
| Bridges | 1.1 |
| Predicted Values | Actual Values | |
|---|---|---|
| Positive | Negative | |
| Positive | TP | FP |
| Negative | FN | TN |
| Predicted Class | ||||
|---|---|---|---|---|
| Flooded | Non-Flooded | Total | ||
| Actual Class | Flooded | 352 | 48 | 400 |
| Non-Flooded | 77 | 323 | 400 | |
| Predicted Class | ||||
|---|---|---|---|---|
| Flooded | Non-Flooded | Total | ||
| Actual Class | Flooded | 371 | 19 | 400 |
| Non-Flooded | 33 | 357 | 400 | |
| No. | Metrics | Altered Dataset (Landmarks + Original Images) | Original Dataset (Without Landmarks) |
|---|---|---|---|
| 1 | Accuracy | 91% | 84.4% |
| 2 | Precision | 0.92 | 0.84 |
| 3 | Recall | 0.95 | 0.90 |
| 4 | F-Score | 0.93 | 0.87 |
| No. | Method | Accuracy Result | Images in Dataset | Location |
|---|---|---|---|---|
| 1 | Deep Learning Neural Network [81] | 92% | 1464 | Lao Cai, Vietnam |
| 2 | Semantic metadata and visual data with Convolutional Neural Network [82] | 83.96% | 6600 | Misc (Flickr images) |
| 3 | Random Forest Classifier [71] | 87.5% | 5000 | Yuyao, China |
| 4 | Analytical Hierarchical Process [79] | 84.4% | 519 | Najran City, Kingdom of Saudi Arabia |
| 5 | Support Vector Machines (SVM) [80] | 84.97% | 1000 | Terengganu, Malaysia |
| 6 | Proposed Model (CNN with landmarks extraction) | 91% | 3000 | Swat, Pakistan |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munawar, H.S.; Ullah, F.; Qayyum, S.; Heravi, A. Application of Deep Learning on UAV-Based Aerial Images for Flood Detection. Smart Cities 2021, 4, 1220-1242. https://doi.org/10.3390/smartcities4030065
Munawar HS, Ullah F, Qayyum S, Heravi A. Application of Deep Learning on UAV-Based Aerial Images for Flood Detection. Smart Cities. 2021; 4(3):1220-1242. https://doi.org/10.3390/smartcities4030065
Chicago/Turabian StyleMunawar, Hafiz Suliman, Fahim Ullah, Siddra Qayyum, and Amirhossein Heravi. 2021. "Application of Deep Learning on UAV-Based Aerial Images for Flood Detection" Smart Cities 4, no. 3: 1220-1242. https://doi.org/10.3390/smartcities4030065
APA StyleMunawar, H. S., Ullah, F., Qayyum, S., & Heravi, A. (2021). Application of Deep Learning on UAV-Based Aerial Images for Flood Detection. Smart Cities, 4(3), 1220-1242. https://doi.org/10.3390/smartcities4030065