
Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview





Abstract
:1. Introduction
- Modification of the parameters of the existing car-following models: For any car-following model, the micro-simulation tool uses various statistical distributions and functions for defining the maximum, minimum, and desired acceleration/deceleration values, desired speed values and other vehicular characteristics that can be adjusted to reflect the behavior of CAVs [17,18,19,20].
- Modification of the parameters of the existing lane-change models: The lane-change system uses lane-change models to define the driver’s decision as to when it is possible to change a lane or not to change a lane in a multi-lane road network system [21]. Mostly lane-changing models are based on a set of rules that enables the driver to make a decision about when it is necessary to change a lane to reach the desired destination [22,23,24,25]. These lane-change rules can be modified to test the behavior of CAVs in the microsimulation platforms.
- Writing external algorithms for car-following techniques: The writing of external algorithms to modify the default car-following model parameters such as headway, safety distance, acceleration functions, speed distributions, cruise control, or platooning is one approach to model the anticipated behavior of AVs and CAVs [26,27,28]. For example, the Microsoft COM (component object model) provides communication, connection, and access to different applications such as the data and functions in the PTV VISSIM microsimulation platform can be accessed externally through the COM-interface using different programming languages such as VBA, Python, C++, C#, MATLAB, and JAVA [29]. It can access each vehicle’s attribute (e.g., current position, acceleration, orientation on the lane, vehicle’s receiving traffic light status, etc.) during a simulation run and can also edit some of the parameters (e.g., arrival pattern of vehicles in the network, create or remove vehicles, etc.
2. Advanced Driver Assistance Systems (ADAS)
2.1. Assistance Technologies for Lateral Movement
- Light detection and ranging (LiDAR): Autonomous vehicles are equipped with various technologies such as GPS, radars, and laser sensors to inspect the surrounding elements while driving. LiDAR is an optical remote sensing technology that measures the distance to a target object or other features of a target (e.g., shape, size, design, etc.) by illuminating it with light, often by using pulses from a laser [34]. The LiDAR technology provides data as a cloud of dense 3D points for the shape of vehicles, pedestrians, curbs, traffic signs, and other neighboring elements within the range of laser sensors [35]. LiDAR is normally installed on the roof of autonomous cars which provides 360-degree imaging. However, this system is in the development stage, yet complex and expensive. For example, the cost of the LiDAR system installed in the Googles’ car is $70,000 [12]. AVs and CAVs rely on the data quality of the LiDAR to provide smooth and safe operations.
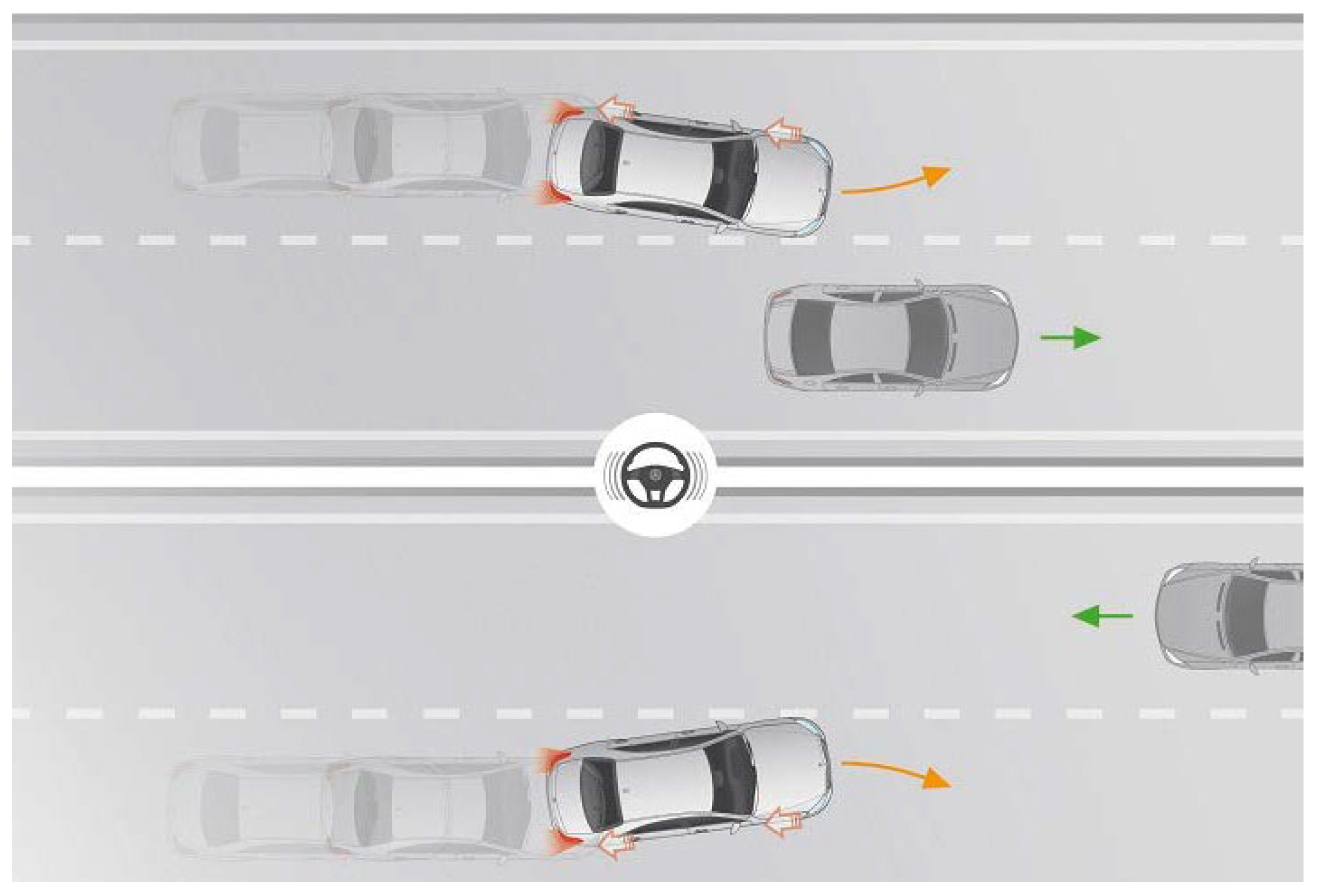
- Lane-keeping: Vehicles are assisted through built-in cameras and positioning systems to monitor lane-markings. Generally, the cameras are fixed above the central rearview mirror. If the vehicle is going off-track, a ‘lane-departure warning (LDW)’ system is automatically activated to warn the driver of a possible exit from the current lane. Another system called ‘Lane-keeping assistant’ prepares the driver for maintaining a lane-discipline through automated steering and/or braking [32] as shown in Figure 2.
- Lane-changing: As the driver decides to change the lane from the current lane, the system alerts the driver for the presence of traffic in the target lane. It is helpful especially when the adjacent vehicle is in the blind spot which could be missed while making a lane-change. The system uses short-range radar sensors that observe the surrounding traffic zones to the adjacent sides and back of the car. If the driver ignores the warning and initiates the lane maneuvering, another strong message is transmitted to avoid the side crash [32].
- Left-turn assist: When the drivers decide to take a left turn at an intersection, this feature alerts the driver using a camera and GPS positioning data if the conditions are not feasible. The laser scanners are installed in front of the vehicle which senses the on-coming traffic and sends a signal to the driver for the application of breaks and/or otherwise, the vehicle decelerates to stop automatically [36].
2.2. Advanced Technologies for Forwarding Movement
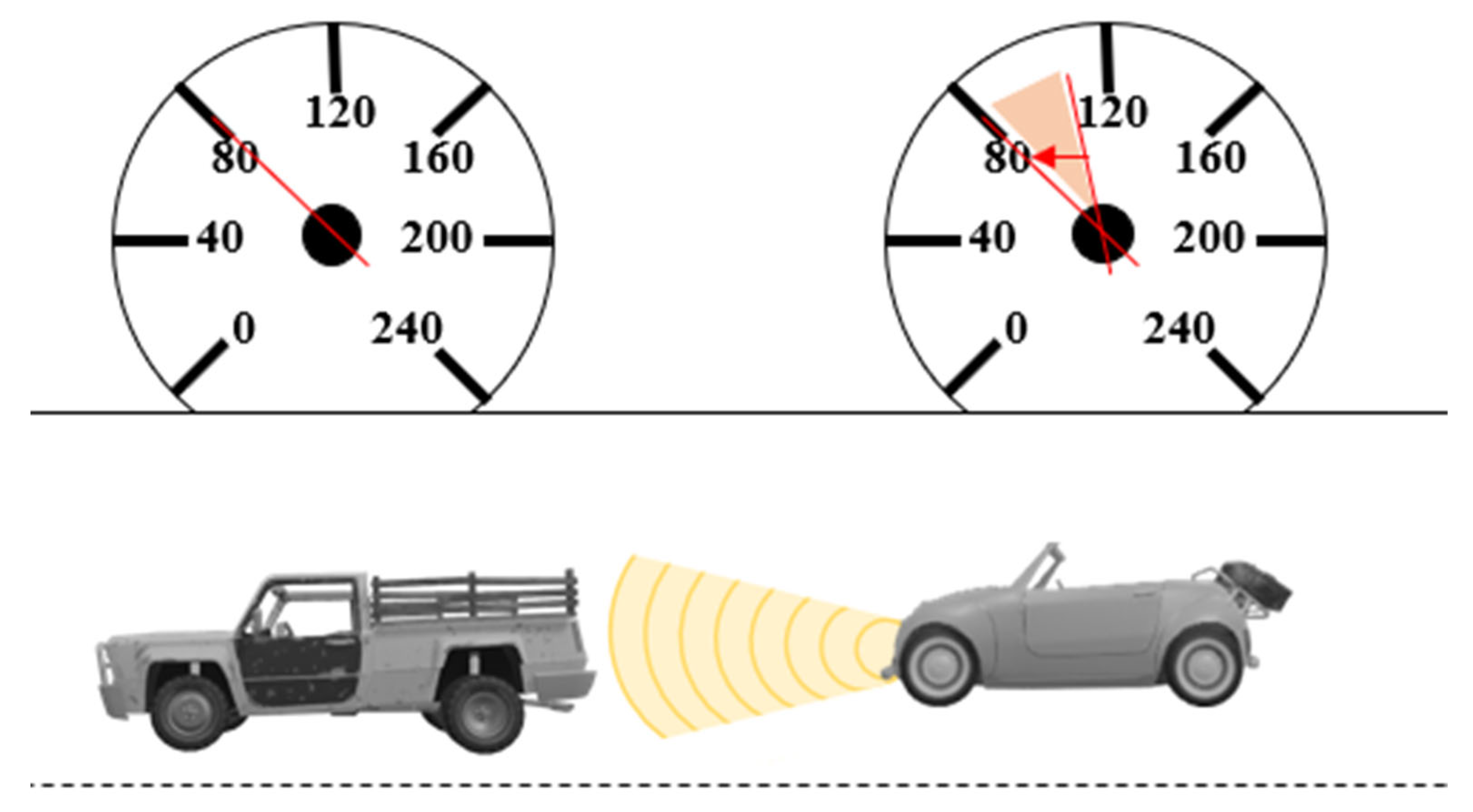
- Adaptive cruise control (ACC): This system is an advanced feature of conventional cruise controls in vehicles. ACC examines the leading traffic in the same lane through cameras, laser, or radar sensors [27,32,36]. This system is designed to provide relief to the driver and convenience by releasing the stress of the need to continuously match the speed with the leading vehicle [27]. It works on two principles. First, the speed and headway of the leading vehicle are recorded by the following vehicle equipped with the ACC feature. Secondly, the following ACC vehicle adjusts its speed and maintain a safe gap from the leading vehicle. If the desired safe gap is diminishing and/or the leading vehicle is slowing down, the ACC vehicle will adjust its speed accordingly as shown in Figure 3. Similarly, if the gap ahead is clear (e.g., front car accelerates or changed a lane), the ACC vehicle will accelerate to achieve the desired cruising speed. Section 4.1 elaborates on the benefits of ACC systems for autonomous cars.
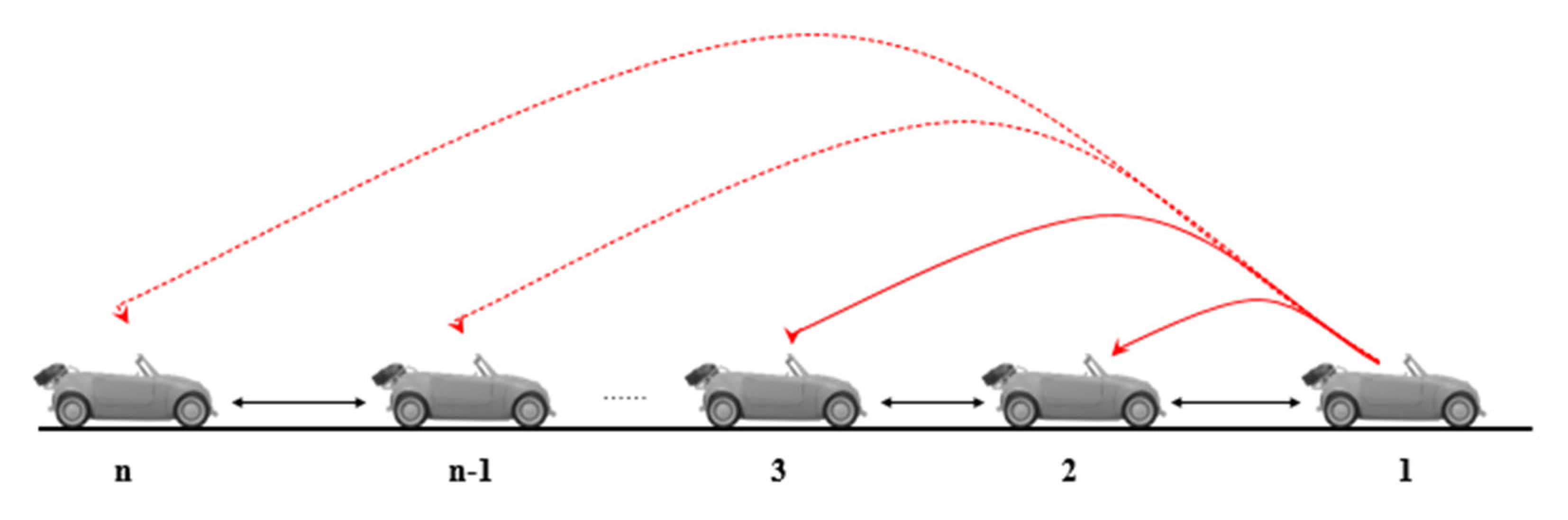
- Cooperative adaptive cruise control (CACC): It is an advanced form of the ACC system which conducts effective V2V communication between the leading and the following vehicles. In such a scenario, the following vehicles will better anticipate the driving behavior of a vehicle ahead. Under CACC, the leading vehicle sends a message about its recommended speed and (sometimes lane assignment) to the following vehicle. Once the signal is received, the following vehicle will adjust its speed and desired distance without the involvement of the driver [36]. CACC enables the vehicle to follow each other at tight distances. Hence, it provides traffic flow stability and improved throughput by increasing highway capacity up to a lane drop [37]. No definite consensus or definition of CACC has been fixed at this stage as the concept of CACC is still under development. This system will provide smooth, safe, and efficient driving behavior. The CACC vehicles maintains shorter safety gaps however the reduced gap between the two vehicles is only possible if both vehicles are equipped with CACC technology [37]. Further, at least 40% of market penetration is required to acquire some benefits of CACC technology [37]. Van Arem developed a car-following model for CACC called the cooperative following (CF) using automated longitudinal control combined with intervehicle communications [37,38]. The CF model forms platoons by connecting vehicles with each other and keeping a tight distance. The CACC platoon can be considered as a train, with the first vehicle of the platoon being the locomotive (leader) and the rest of the railcars follow the instructions of the leader. Figure 4 presents the principle for CACC communication between the ‘n’ number of vehicles where ‘n−1’ is the preceding vehicle. The first vehicle is the leader of a platoon while the rest of the following vehicles are taking directions from the leader. Each vehicle in the string has a leading vehicle and the following vehicle [38] e.g., the third vehicle follows the second vehicle but leads the fourth vehicle.
- Front cross-traffic monitoring/alert (FCTA): This feature uses a camera, radars, and a color display screen to detect the vehicles or bicyclists at T-intersections [32]. The vehicle is vulnerable at intersections because of a lack of sight distance. Once the object is under the system’s trajectory, FCTA identifies the object and shows it to the user through an interactive display. If there exists a risk, a user is warned and the system boosts the braking power until it is sufficient to prevent the vehicle from a collision or otherwise reducing the amount of possible damage.
2.3. Reverse Movement
2.4. Crash Avoidance/Severity Reduction
2.5. Parking
2.6. Attention Monitoring
2.7. Congestion Assistant or Traffic Jam Assist
3. Automated Driving Systems (ADS)
3.1. Level of Autonomous Vehicles
3.2. Safety Considerations for ADSs
3.3. AVs Legislation, Regulations and Deployment by State and Federal Authorities
4. Impacts of AVs and CAVs on Traffic Flow
4.1. Implications of AVs and CAVs on Traffic Speed, Capacity, and Travel Times
4.2. Estimating Traffic Flow Benefits for ACC and CACC Models
4.3. Estimating Intersection Capacity Benefits through V2V and V2I Communications
4.4. Safety Benefits of AVs and CAVs
5. Conclusions and Future Research Opportunities
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- ATKINS. Research on the Impacts of Connected and Autonomous Vehicles (CAVs) on Traffic Flow, Stage 2: Traffic Modelling and Analysis Technical Report, Department for Transport, 2016; ATKINS: London, UK, 2016. [Google Scholar]
- Gibbs, S. Google’s Self-Driving Car: How Does It Work and When Can We Drive One? Guardian 2014, 5–29. Available online: https://www.theguardian.com/technology/2014/may/28/google-self-driving-car-how-does-it-work (accessed on 14 March 2022).
- Duarte, F.; Ratti, C. The impact of autonomous vehicles on cities: A review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Eluru, N.; Choudhury, C.F. Impact of shared and autonomous vehicles on travel behavior. Transportation 2019, 46, 1971–1974. [Google Scholar] [CrossRef] [Green Version]
- Hamadneh, J.; Esztergár-Kiss, D. Impacts of shared autonomous vehicles on the travelers’ mobility. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Cracow, Poland, 5–7 June 2019; pp. 1–9. [Google Scholar]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Intelligent Transportation—ITS CANADA. Available online: https://www.itscanada.ca/it/index.html (accessed on 14 March 2022).
- Fyfe, M.R. Safety Evaluation of Connected Vehicle Applications Using Micro-Simulation. Doctoral Dissertation, University of British Columbia, Vancouver, BC, Canada, 2016. [Google Scholar]
- Richard, C.M.; Morgan, J.F.; Bacon, L.P.; Graving, J.; Divekar, G.; Lichty, M.G. Multiple Sources of Safety Information from v2v and v2i: Redundancy, Decision Making, and Trust—Safety Message Design Report; United States, Federal Highway Administration, Office of Safety Research and Technology: Washington, DC, USA, 2015. [Google Scholar]
- Zhu, F. Modeling, Control, and Impact Analysis of The Next Generation Transportation System. Doctoral Dissertation, Purdue University, West Lafayette, IN, USA, 2016. [Google Scholar]
- Silberg, G.; Wallace, R.; Matuszak, G.; Plessers, J.; Brower, C.; Subramanian, D. Self-driving cars: The next revolution. White Pap. KPMG LLP Cent. Automot. Res. 2012, 9, 132–146. [Google Scholar]
- Sakr, A.H.; Bansal, G. Cooperative localization via DSRC and multi-sensor multi-target track association. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 66–71. [Google Scholar]
- Zeng, X.; Balke, K.; Songchitruksa, P. Potential Connected Vehicle Applications to Enhance Mobility, Safety, and Environmental Security; Southwest Region University Transportation Center (US): College Station, TX, USA, 2012. [Google Scholar]
- SAE International. Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Ahmed, H.U.; Huang, Y.; Lu, P. A Review of Car-Following Models and Modeling Tools for Human and Autonomous-Ready Driving Behaviors in Micro-Simulation. Smart Cities 2021, 4, 314–335. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Gipps, P.G. Behavioral car-following model for computer simulation. Transp. Res. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Wiedemann, R. Simulation des StraBenverkehrsflusses; Schriftenreihe des Tnstituts fir Verkehrswesen der Universitiit Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Wiedemann, R.; Reiter, U. Microscopic traffic simulation: The simulation system MISSION, background and actual state. Proj. ICARUS (V1052) Final Rep. 1992, 2, 1–53. [Google Scholar]
- Lochrane, T. A New Multidimensional Psycho-Physical Framework for Modeling Car-Following in a Freeway Work Zone. Ph.D. Thesis, University of Central Florida, Orlando, FL, USA, 2014. [Google Scholar]
- Hidas, P. Modelling lane changing and merging in microscopic traffic simulation. Transp. Res. Part C Emerg. Technol. 2002, 10, 351–371. [Google Scholar] [CrossRef]
- Gipps, P.G. A model for the structure of lane-changing decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Sparmann, U. Spurwechselvorgänge auf Zweispurigen BABRichtungsfahrbahnen. ForschungStraßenbau und Straßenverkehrstechnik. Heft Forsch Strassenbau U Strassenverkehrstech 1978, 263, 106S. [Google Scholar]
- Hwang, S.Y.; Park, C.H. Modeling of the gap acceptance behavior at a merging section of urban freeway. In Proceedings of the Eastern Asia Society for Transportation Studies; Eastern Asia Society for Transportation (EASTS): Tokyo, Japan, 2005; p. e1656. [Google Scholar]
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Sun, J. Simulation framework for vehicle platooning and car-following behaviors under connected-vehicle environment. Procedia-Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- PTV Group. PTV VISSIM 2020 Introduction to the COM API; PTV Group: Karlsruhe, Germany, 2019. [Google Scholar]
- Hasenjäger, M.; Wersing, H. Personalization in advanced driver assistance systems and autonomous vehicles: A review. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (itsc), Kanagawa, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Automated Vehicles for Safety—The Evolution of Automated Safety Technologies. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety (accessed on 14 March 2022).
- Hunter, M.P.; Guin, A.; Rodgers, M.O.; Huang, Z.; Greenwood, A.T. Cooperative Vehicle–Highway Automation (CVHA) Technology: Simulation of Benefits and Operational Issues; United States, Federal Highway Administration: Washington, DC, USA, 2017. [Google Scholar]
- Lu, G.; Tomizuka, M. A laser scanning radar based autonomous lateral vehicle following control scheme for automated highways. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4 June 2003; pp. 30–35. [Google Scholar]
- Avadhanulu, M. An Introduction to Lasers Theory and Applications; S. Chand Publishing: New Delhi, India, 2001. [Google Scholar]
- Wei, J.; Snider, J.M.; Kim, J.; Dolan, J.M.; Rajkumar, R.; Litkouhi, B. Towards a viable autonomous driving research platform. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast City, Australia; 2013; pp. 763–770. [Google Scholar]
- Kockelman, K.; Avery, P.; Bansal, P.; Boyles, S.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnan, D.; Helsel, J. Implications of Connected and Automated Vehicles on the Safety and Operations of Roadway Networks; Final Report; Texas Department of Transportation: Austin, TX, USA, 2016. [Google Scholar]
- Johnson, L. Fed Wants More Car Safety Tech. 2012. Available online: https://www.americanprogress.org/article/5-ways-the-obama-administration-revived-the-auto-industry-by-reducing-oil-use/ (accessed on 15 May 2021).
- Van Arem, B.; Tampere, C.M.; Malone, K. Modelling traffic flows with intelligent cars and intelligent roads. In Proceedings of the IEEE IV2003 Intelligent Vehicles Symposium. Proceedings (Cat. No. 03TH8683), Columbus, OH, USA; 2003; pp. 456–461. [Google Scholar]
- Takahashi, Y.; Komoguchi, T.; Seki, M.; Patel, N.; Auner, D.; Campbell, B. Alert Method for Rear Cross Traffic Alert System in North America; 0148-7191; SAE Technical Paper: Warrendale, PA, USA, 2013. [Google Scholar]
- National Highway Traffic Safety Administration. Backover Crash Avoidance Technologies: FMVSS No. 111 Final Regulatory Impact Analysis; National Highway Traffic Safety Administration: Washington, DC, USA, 2014. [Google Scholar]
- Kidd, D.G.; McCartt, A.T. Differences in glance behavior between drivers using a rearview camera, parking sensor system, both technologies, or no technology during low-speed parking maneuvers. Accid. Anal. Prev. 2016, 87, 92–101. [Google Scholar] [CrossRef]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef]
- Isaksson-Hellman, I.; Lindman, M. Evaluation of rear-end collision avoidance technologies based on real world crash data. In Proceedings of the Future Active Safety Technology Towards zero traffic accidents (FASTzero), Gothenburg, Sweden, 19 August 2015; pp. 9–11. [Google Scholar]
- Ranney, T.A.; Garrott, W.R.; Goodman, M.J. NHTSA Driver Distraction Research: Past, Present, and Future; CiteseerX: State College, PA, USA, 2001. [Google Scholar]
- National Highway Traffic Safety Administration. Automated Driving Systems 2.0: A Vision for Safety; US Department of Transportation, DOT HS: Washington, DC, USA, 2017; Volume 812, p. 442. [Google Scholar]
- National Highway Traffic Safety Administration. Preliminary Statement of Policy Concerning Automated Vehicles; National Highway Traffic Safety Administration: Washington, DC, USA, 2013; pp. 1–14. [Google Scholar]
- Mervis, J. Are We Going Too Fast on Driverless Cars. Science 2017. Available online: https://www.science.org/content/article/are-we-going-too-fast-driverless-cars (accessed on 14 May 2021). [CrossRef]
- Bergen, M. Alphabet Launches the First Taxi Service with no Human Drivers. Bloom. Technol. 2017. Available online: https://Bloom.Bg/2ea2dml (accessed on 15 May 2021).
- Lee, T.B. Fully Driverless Cars Could be Months Away. Ars Tech. 2017, 3. Available online: https://arstechnica.com/cars/2017/10/report-waymo-aiming-to-launch-commercial-driverless-service-this-year/ (accessed on 15 May 2021).
- Simonite, T. Prepare to be Underwhelmed by 2021’s Autonomous Cars. MIT Technol. Rev. 2016. Available online: https://www.technologyreview.com/2016/08/23/157929/prepare-to-be-underwhelmed-by-2021s-autonomous-cars/ (accessed on 15 May 2021).
- Committee, S.O.-R.A.V.S. Taxonomy and Definitions for Terms Related to Driving Automation Systems for on-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- SAE. Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; J3016; SAE International Standard: Warrendale, PA, USA, 2014. [Google Scholar]
- Vehicles, A. Autonomous Vehicles/Self-Driving Vehicles Enacted Legislation. 2020. Available online: https://www.ncsl.org/research/transportation/autonomous-vehicles-self-driving-vehicles-enacted-legislation.aspx (accessed on 15 May 2021).
- Dot, U. Preparing for the Future of Transportation: Automated Vehicles 3.0. US. Available online: https://www.transportation.gov/av/3 (accessed on 15 May 2021).
- McGuckin, T.; Lambert, J.; Newton, D.; Pearmine, A.; Hubbard, E.; Sheehan, R. Leveraging the Promise of Connected and Autonomous Vehicles to Improve Integrated Corridor Management and Operations: A Primer; United States, Federal Highway Administration: Washington, DC, USA, 2017. [Google Scholar]
- Noch, M. Are We Ready for Connected and Automated Vehicles? Public Roads 2018, 82, FHWA-HRT-18-003. [Google Scholar]
- Federal Highway Administration, O.O.P.A. Dialogue on Highway Automation. Def. Transp. J. 2018, 74, 23. [Google Scholar]
- Wright, J.; Garrett, J.K.; Hill, C.J.; Krueger, G.D.; Evans, J.H.; Andrews, S.; Wilson, C.; Rajbhandari, R.; Burkhard, B. National Connected Vehicle Field Infrastructure Footprint Analysis: Final Report. Fed. Highw. Adm. ITS-JPO 2014, 159. [Google Scholar]
- Andrews, S. Deployment Strategy for Rural Connected Vehicle Systems; Final Report to Michigan DOT, ENTERPRISE Pooled Fund Study TPF-5(231); Michigan DOT: Lansing, MI, USA, 2014. [Google Scholar]
- Tettamanti, T.; Varga, I.; Szalay, Z. Impacts of autonomous cars from a traffic engineering perspective. Period. Polytech. Transp. Eng. 2016, 44, 244–250. [Google Scholar] [CrossRef] [Green Version]
- Sukennik, P.; Lohmiller, J.; Schlaich, J. Simulation-Based Forecasting the Impacts of Autonomous Driving. In Proceedings of the International Symposium of Transport Simulation (ISTS’18) and the International Workshop on Traffic Data Collection and its Standardization (IWTDCS’18), Matsuyama, Japan, 6–8 August 2018. [Google Scholar]
- Songchitruksa, P.; Bibeka, A.; Lin, L.I.; Zhang, Y. Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation; Center for Advancing Transportation Leadership and Safety (ATLAS Center): Ann Arbor, MI, USA, 2016. [Google Scholar]
- Seraj, M.; Li, J.; Qiu, Z. Modeling microscopic car-following strategy of mixed traffic to identify optimal platoon configurations for multiobjective decision-making. J. Adv. Transp. 2018, 2018, 7835010. [Google Scholar] [CrossRef]
- Bierstedt, J.; Gooze, A.; Gray, C.; Peterman, J.; Raykin, L.; Walters, J. Effects of next-generation vehicles on travel demand and highway capacity. FP Think Work. Group 2014, 8, 10–11. [Google Scholar]
- Xie, Y.; Zhang, H.; Gartner, N.H.; Arsava, T. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment. J. Intell. Transp. Syst. 2017, 21, 136–147. [Google Scholar] [CrossRef]
- Elefteriadou, L.; Martin, B.; Simmerman, T.; Hale, D. Using Microsimulation to Evaluate the Effects of Advanced Vehicle Technologies on Congestion; University of Florida, Center for Multimodal Solutions for Congestion Mitigation: Gainesville, FL, USA, 2011. [Google Scholar]
- Kesting, A.; Treiber, M.; Schönhof, M.; Kranke, F.; Helbing, D. Jam-avoiding adaptive cruise control (ACC) and its impact on traffic dynamics. In Traffic and Granular Flow’05; Springer: Berlin, Germany, 2007; pp. 633–643. [Google Scholar]
- Davis, L. Effect of adaptive cruise control systems on traffic flow. Phys. Rev. E 2004, 69, 066110. [Google Scholar] [CrossRef]
- Calvert, S.; Schakel, W.; Van Lint, J. Will automated vehicles negatively impact traffic flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Alkim, T.P.; Schuurman, H.; Tampère, C. Effects of external cruise control and co-operative following on highways: An analysis with the MIXIC traffic simulation model. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No. 00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 474–479. [Google Scholar]
- Shladover, S.; VanderWerf, J.; Miller, M.A.; Kourjanskaia, N.; Krishnan, H. Development and Performance Evaluation of AVCSS Deployment Sequences to Advance from Today’s Driving Environment to Full Automation; California PATH: Berkeley, CA, USA, 2001. [Google Scholar]
- Vander Werf, J.; Shladover, S.E.; Miller, M.A.; Kourjanskaia, N. Effects of adaptive cruise control systems on highway traffic flow capacity. Transp. Res. Rec. 2002, 1800, 78–84. [Google Scholar] [CrossRef]
- Nowakowski, C.; Shladover, S.E.; Cody, D.; Bu, F.; O’Connell, J.; Spring, J.; Dickey, S.; Nelson, D. Cooperative Adaptive Cruise Control: Testing Drivers’ Choices of Following Distances; Final Report DTFH61-07-H-00038329; CALTRANS: Sacramento, CA, USA, 2011; pp. 1055–1425. [Google Scholar]
- Nowakowski, C.; O’Connell, J.; Shladover, S.E.; Cody, D. Cooperative adaptive cruise control: Driver acceptance of following gap settings less than one second. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Francisco, CA, USA, 1 October 2010; pp. 2033–2037. [Google Scholar]
- Shladover, S.E.; Nowakowski, C.; O’Connell, J.; Cody, D. Cooperative adaptive cruise control: Driver selection of car-following gaps. In Proceedings of the 17th ITS World Congress ITS, Busan, Korea, 6 January 2011. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Davis, L. Effect of adaptive cruise control systems on mixed traffic flow near an on-ramp. Phys. A Stat. Mech. Appl. 2007, 379, 274–290. [Google Scholar] [CrossRef] [Green Version]
- Arnaout, G.M.; Bowling, S. A progressive deployment strategy for cooperative adaptive cruise control to improve traffic dynamics. Int. J. Autom. Comput. 2014, 11, 10–18. [Google Scholar] [CrossRef] [Green Version]
- Calvert, S.C.; van den Broek, T.A.; van Noort, M. Cooperative driving in mixed traffic networks—Optimizing for performance. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala De Henares, Spain, 3–7 June 2012; pp. 861–866. [Google Scholar]
- Yeo, H.; Shladover, S.E.; Krishnan, H.; Skabardonis, A. Microscopic traffic simulation of vehicle-to-vehicle hazard alerts on freeway. Transp. Res. Rec. 2010, 2189, 68–77. [Google Scholar] [CrossRef]
- Lee, J.; Park, B.; Malakorn, K.; So, J. Safety Assessment of Cooperative Vehicle Infrastructure System-Based Urban Traffic Control. In Proceedings of the 3rd International Conference on Road Safety and Simulation, Indianapolis, IN, USA, 14–16 September 2011. [Google Scholar]
- Wu, G.; Boriboonsomsin, K.; Zhang, W.-B.; Li, M.; Barth, M. Energy and emission benefit comparison of stationary and in-vehicle advanced driving alert systems. Transp. Res. Rec. 2010, 2189, 98–106. [Google Scholar] [CrossRef]
- Li, Z.; Chitturi, M.V.; Zheng, D.; Bill, A.R.; Noyce, D.A. Modeling reservation-based autonomous intersection control in VISSIM. Transp. Res. Rec. 2013, 2381, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Martin-Gasulla, M.; Sukennik, P.; Lohmiller, J. Investigation of the impact on throughput of connected autonomous vehicles with headway based on the leading vehicle type. Transp. Res. Rec. 2019, 2673, 617–626. [Google Scholar] [CrossRef]
- Lin, P.; Liu, J.; Jin, P.J.; Ran, B. Autonomous vehicle-intersection coordination method in a connected vehicle environment. IEEE Intell. Transp. Syst. Mag. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. National Motor Vehicle Crash Causation Survey: Report to Congress; Technical Report DOT HS; National Highway Traffic Safety Administration: Washington, DC, USA, 2008; Volume 811, p. 059. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Koopman, P.; Wagner, M. Autonomous vehicle safety: An interdisciplinary challenge. IEEE Intell. Transp. Syst. Mag. 2017, 9, 90–96. [Google Scholar] [CrossRef]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model and Validation: Final Report; Tech. Rep. FHWA-HRT-08-051; US Department of Transportation, Federal Highway Administration: McLean, VA, USA, 2008. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Higashiyama, K.; Kimura, K.; Babakarkhail, H.; Sato, K. Safety and Efficiency of Intersections With Mix of Connected and Non-Connected Vehicles. IEEE Open J. Intell. Transp. Syst. 2020, 1, 29–34. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evolution Era | Automated Technologies |
|---|---|
| 1950–2000 | Safety convenience features |
| Cruise control | |
| Seat belts | |
| Antilock brakes | |
| 2000+–2010 | Advanced safety features |
| Electronic Stability Control | |
| Blind Spot Detection | |
| Forward Collision Warning | |
| Lane Departure Warning | |
| 2010+–2016 | Advanced driver assistance features |
| Rearview Video Systems | |
| Automatic Emergency Braking | |
| Pedestrian Automatic Emergency Braking | |
| Rear Automatic Emergency Braking | |
| Rear Cross-Traffic Alert | |
| Lane Centering Assist | |
| 2016+–2025 | Partially automated safety features |
| Lane-keeping assist | |
| Adaptive cruise control | |
| Traffic jam assist | |
| Self-park | |
| 2025+ | Fully automated safety features |
| Highway autopilot |
| Vehicle Manufacturer | Lateral Movement | Forward Movement | Reverse Movement | Pre-Crash Systems | Parking Task | Attention Monitor | Congestion Assistant | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Lane Departure | Lane-Keeping Assistant | Lane Changing/Blind Spot Detection | Adaptive Cruise Control | Front Cross-Traffic Monitor | Rearview Camera | Rear Cross-Traffic Monitor | Brake Assistant | Forward Collision Warning | Active Protection | ||||
| Audi | Y | Y | Y | Y(radar) | n.a. | Y | n.a. | Y | Y | Y | Y(A) | n.a. | Exp. 2016 (w/o hand) |
| BMW | Y | n.a. | Y | Y(radar) | n.a. | Y | n.a. | Y | Y | Y | Y(A) | Y | Y (w/hand) |
| Ford/Lincoln | Y | Y | Y | Y(radar) | n.a. | Y | Y | Y | Y | n.a. | Y(S) | n.a. | Exp. 2017 |
| Volvo | Y | Y | Y | Y | n.a. | n.a. | Y | Y | n.a. | Y | n.a. | Y | Exp. 2014 |
| Mercedes-Benz | Y | Y | Y | Y(radar) | Y | Y | Y | Y | Y | Y | Y(S) | Y | Y (w/hand) |
| Cadillac | Y | n.a. | Y | Y | n.a. | Y | Y | Y | Y | n.a. | Y(S) | n.a. | n.a. |
| Infiniti/Nissan | Y | Y | Y | Y(radar) | n.a. | Y | Y | Y | n.a. | n.a. | n.a. | n.a. | n.a. |
| Acura/Honda | Y | Y | n.a. | Y | n.a. | Y | n.a. | n.a. | Y | n.a. | n.a. | n.a. | n.a. |
| Lexus/Toyota | Y | Y | Y | Y(radar) | n.a. | n.a. | Y | Y | n.a. | Y | Y | Y | n.a. |
| Kia | Y | n.a. | Y | Y(radar) | n.a. | Y | Y | Y | n.a. | Y | Y | n.a. | n.a. |
| Hyundai | Y | Y | Y | Y(radar) | n.a. | n.a. | Y | Y | n.a. | n.a. | n.a. | n.a. | n.a. |
| SAE Level | Name and Definition | Steering, Acceleration/Deceleration | Monitoring Driving Environment | Fallback Performance of a Dynamic Driving Task | System Capability (Driving Modes) |
|---|---|---|---|---|---|
Level 0  | No Automation—The full-time performance by the human driver of all aspects of the dynamic driving task, even when enhanced by warning or intervention systems. | Human driver | Human driver | Human driver | - |
Level 1  | Driver Assistance—The driving mode-specific execution by a driver assistance system of either steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task. | Human driver and system | Human driver | Human driver | Some driving modes |
Level 2  | Partial Automation—The driving mode-specific execution by one or more driver assistance systems of both steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task. | Human driver and system | Human driver | Human driver | Some driving modes |
Level 3  | Conditional Automation—The driving mode-specific performance by an automated driving system of all aspects of the dynamic driving task with the expectation that the human driver will respond appropriately to a request to intervene. | System | System | Human driver | Some driving modes |
Level 4  | High Automation—The driving mode-specific performance by an automated driving system of all aspects of the dynamic driving task, even if a human driver does not respond appropriately to a request to intervene. | System | System | System | Some driving modes |
Level 5  | Full Automation—The full-time performance by an automated driving system of all aspects of the dynamic driving task under all roadway and environmental conditions that can be managed by a human driver. | System | System | System | All driving codes |
| Scenario | Average Delay | Average Journey Time | ||
|---|---|---|---|---|
| (s) | (%) | (s) | (%) | |
| Base | 35.84 | - | 539.79 | - |
| 25% CAV | 36.17 | +0.9% | 538.49 | −0.2% |
| 50% CAV | 33.39 | −6.8% | 533.62 | −1.1% |
| 75% CAV | 29.77 | −16.9% | 527.72 | −2.2% |
| 100% CAV | 23.72 | −33.8% | 517.77 | −4.1% |
| Upper bound * | 21.38 | −40.3% | 479.29 | −11.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, H.U.; Huang, Y.; Lu, P.; Bridgelall, R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities 2022, 5, 382-404. https://doi.org/10.3390/smartcities5010022
Ahmed HU, Huang Y, Lu P, Bridgelall R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities. 2022; 5(1):382-404. https://doi.org/10.3390/smartcities5010022
Chicago/Turabian StyleAhmed, Hafiz Usman, Ying Huang, Pan Lu, and Raj Bridgelall. 2022. "Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview" Smart Cities 5, no. 1: 382-404. https://doi.org/10.3390/smartcities5010022
APA StyleAhmed, H. U., Huang, Y., Lu, P., & Bridgelall, R. (2022). Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities, 5(1), 382-404. https://doi.org/10.3390/smartcities5010022