Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands




Abstract
:1. Introduction
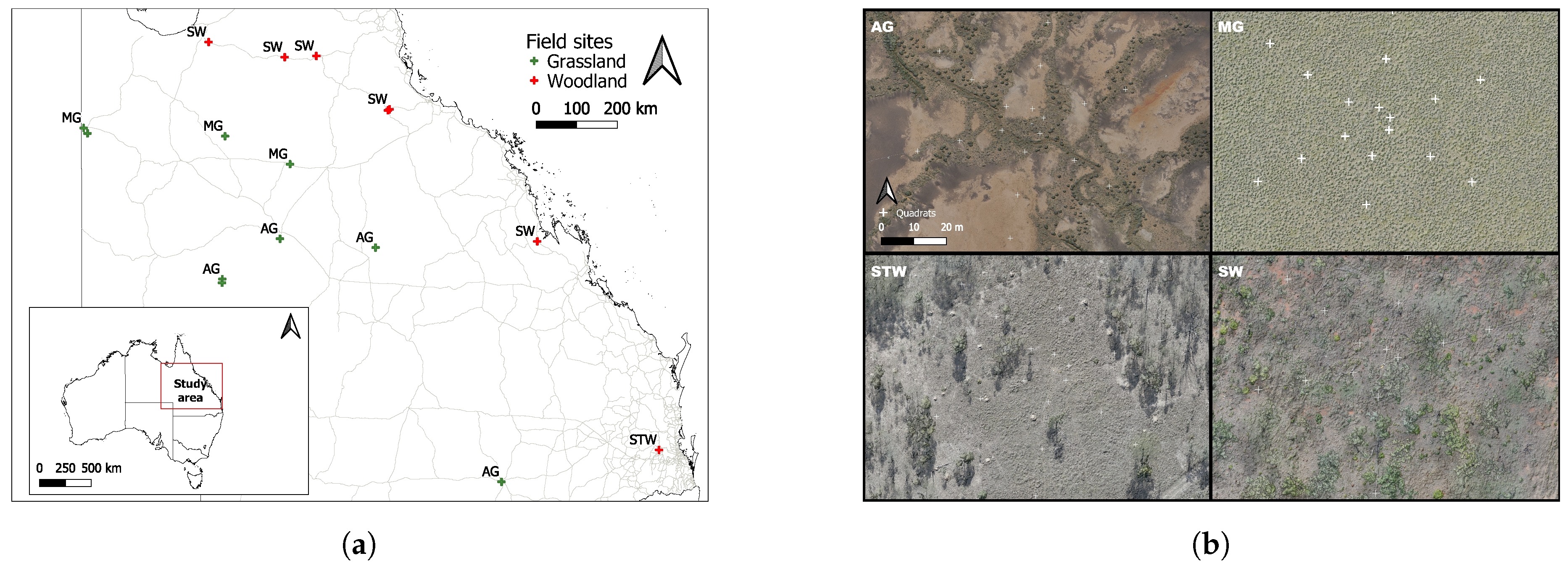
Study Area
2. Materials and Methods
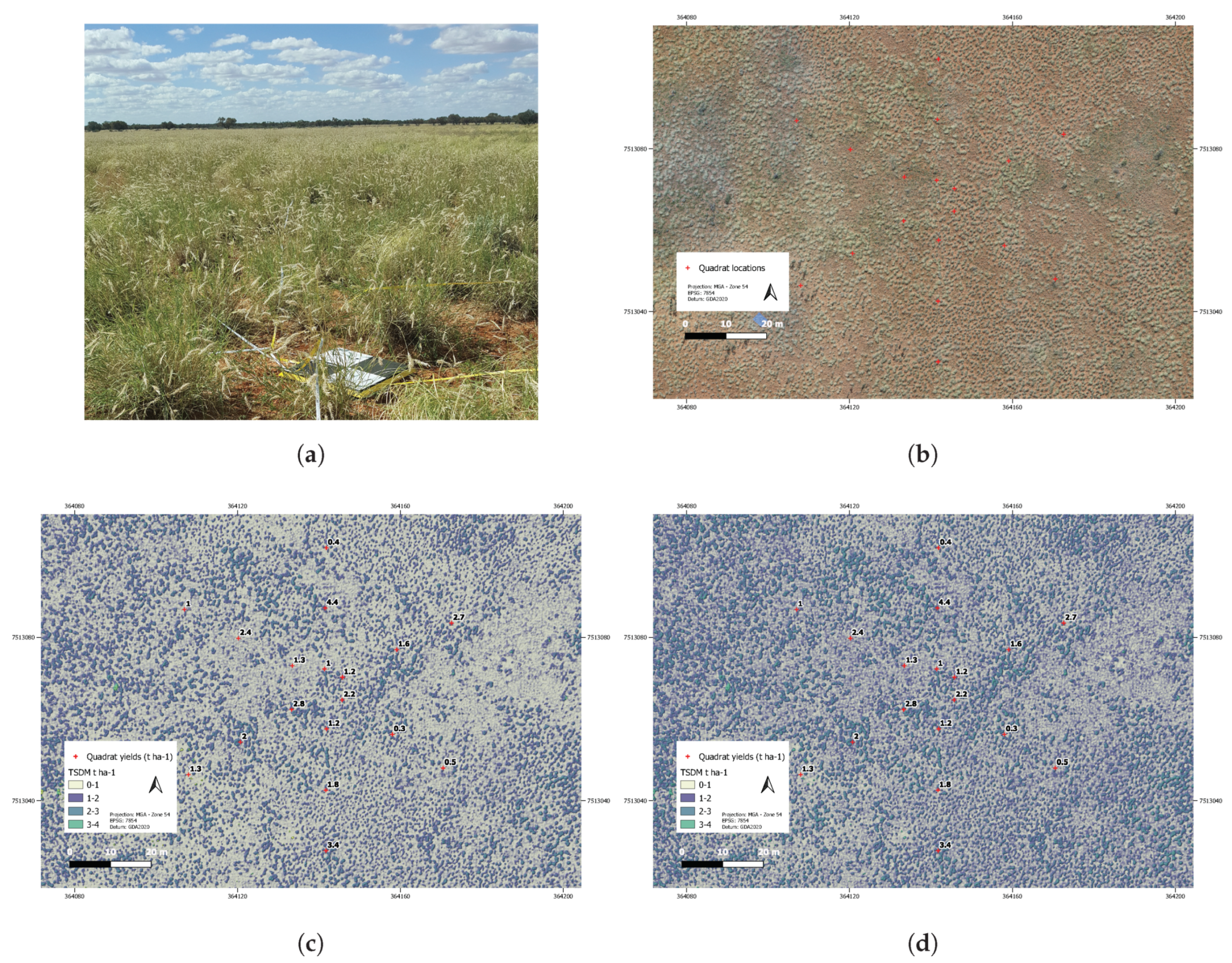
2.1. Field Site Sampling
2.2. UAV Data Capture
2.2.1. Mission Planning and Execution
2.2.2. Ground Control
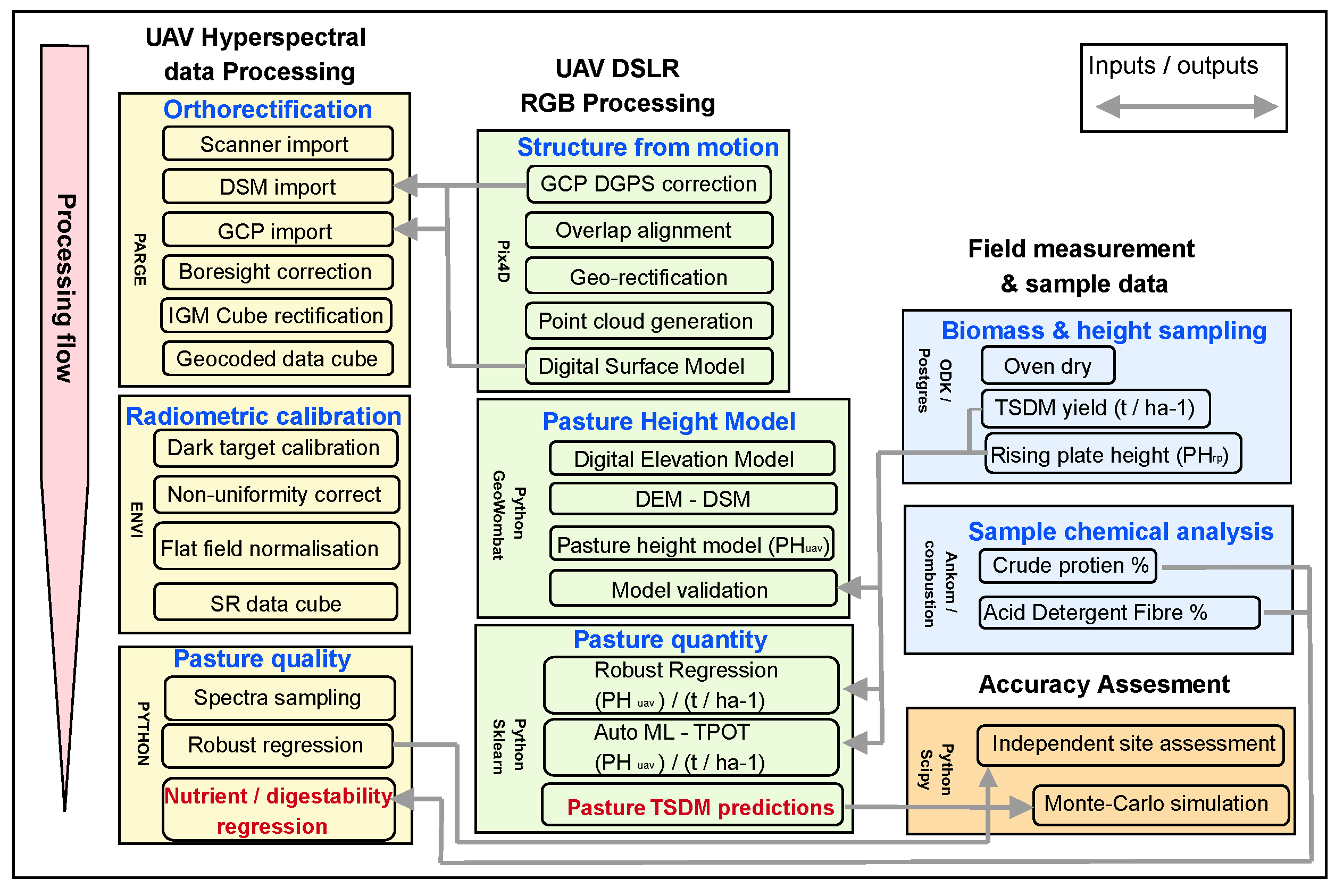
2.3. Data Processing and Analysis
2.3.1. UAV DSLR RGB Imagery
2.3.2. UAV Hyperspectral Imagery
2.4. Statistical Analysis
2.4.1. Pasture Biomass
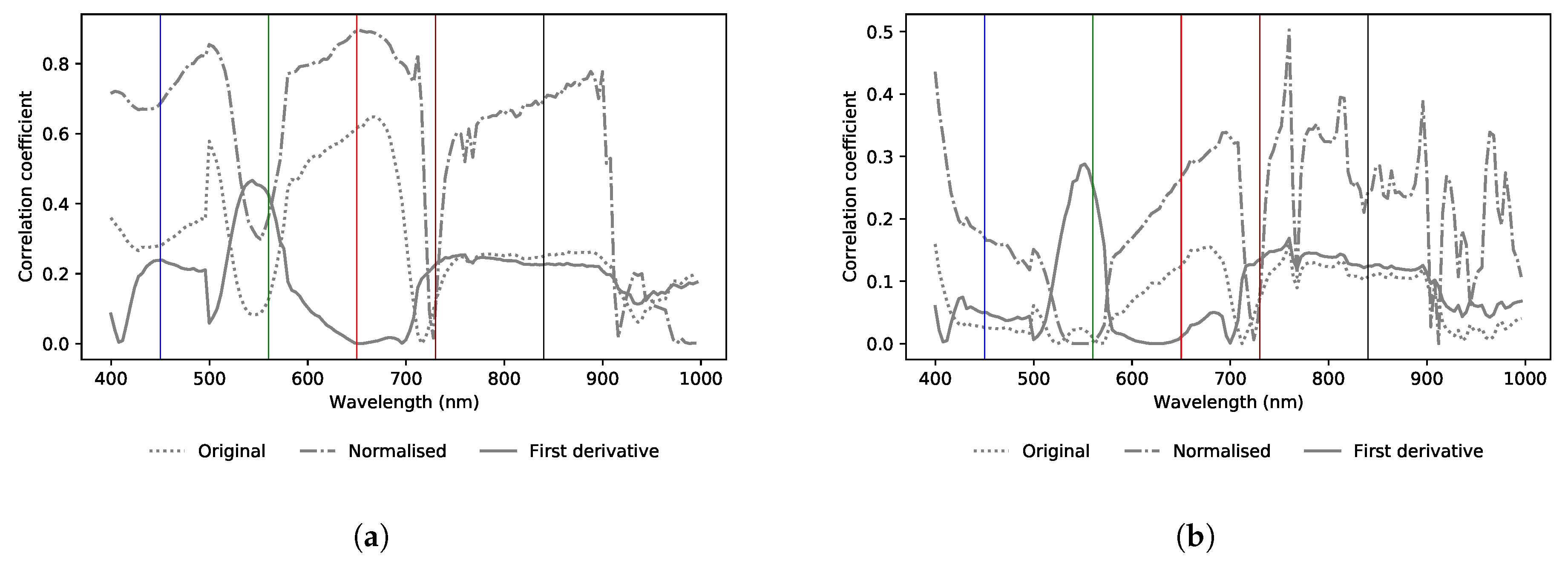
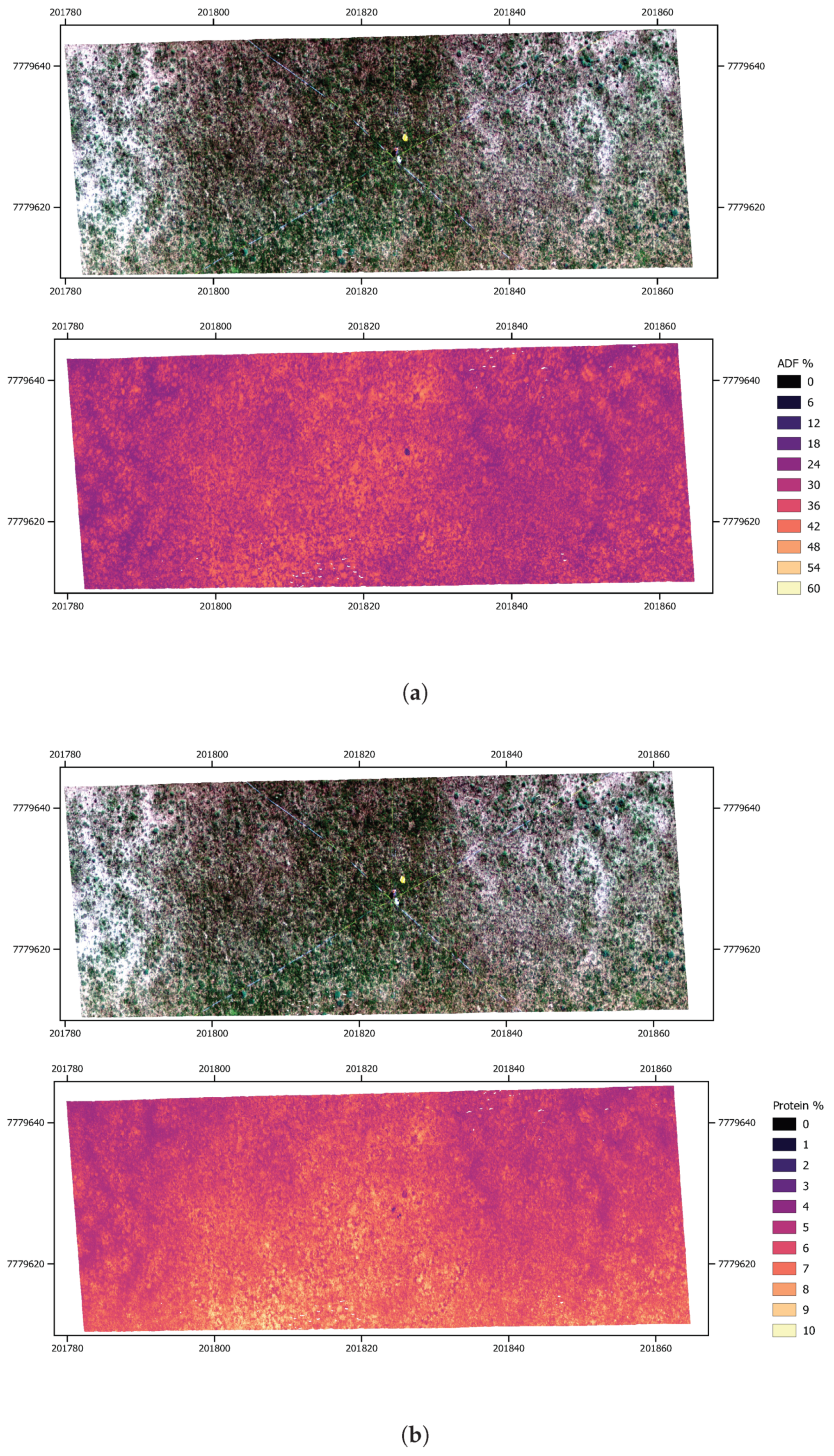
2.4.2. Pasture Nutrient Estimation
3. Results
3.1. Ground Control Accuracy
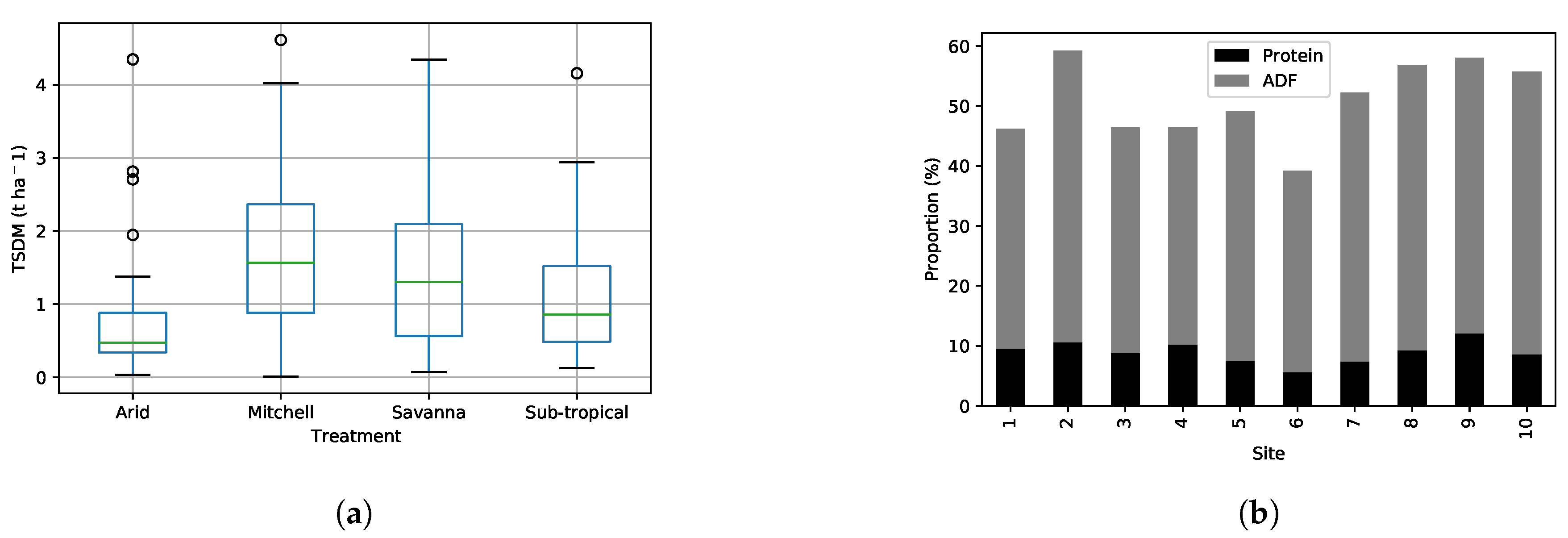
3.2. Field Site Sample Results
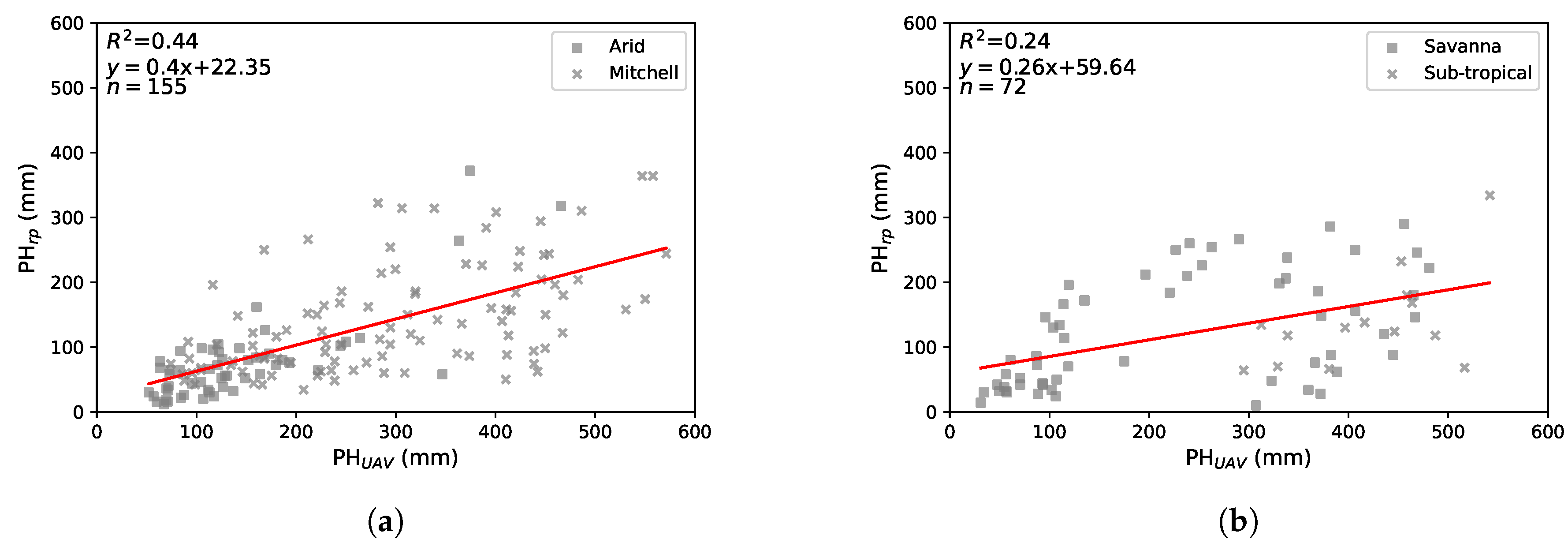
3.3. Pasture Height Comparisons
3.4. Predictive Modelling
3.4.1. Pasture Biomass
3.4.2. Pasture Quality
4. Discussion
5. Conclusions and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Johnston, P.; McKeon, G.; Buxton, R.; Cobon, D.; Day, K.; Hall, W.; Scanlan, J. Managing Climatic Variability in Queensland’s Grazing Lands—New Approaches. In Applications of Seasonal Climate Forecasting in Agricultural and Natural Ecosystems; Springer: Dordrecht, The Netherlands, 2010; Chapter III; pp. 197–226. [Google Scholar]
- Department of Agriculture and Fisheries. Queensland Agriculture Snapshot. 2018. Available online: https://www.publications.qld.gov.au/dataset/state-of-queensland-agriculture-report-june-2014/resource/1c4ac429-da34-464d-845c-f3ad536588f8 (accessed on 1 May 2020).
- Schmoldt, D.L. Building Knowledge-Based Systems for Natural Resource Management, 1st ed.; Springer: Boston, MA, USA, 1996. [Google Scholar]
- McKeon, G.; Hall, W.; Henry, B.; Stone, G.; Watson, I. Pasture Degradation and Recovery in Australia’s Rangelands: Learning from History; Queensland Department of Natural Resources, Mines and Energy: Brisbane, Australia, 2004.
- McKeon, G.M.; Day, K.A.; Howden, S.M.; Mott, J.J.; Orr, D.M.; Scattini, W.J.; Weston, E.J. Northern Australian Savannas: Management for Pastoral Production. J. Biogeogr. 1990, 17, 355–372. [Google Scholar] [CrossRef]
- Pickup, G.; Chewings, V.H. A grazing gradient approach to land degradation assessment in arid areas from remotely-sensed data. Int. J. Remote Sens. 1994, 15, 597–617. [Google Scholar] [CrossRef]
- Bartley, R.; Corfield, J.P.; Hawdon, A.A.; Kinsey-Henderson, A.E.; Abbott, B.N.; Wilkinson, S.N.; Keen, R.J. Can changes to pasture management reduce runoff and sediment loss to the Great Barrier Reef? The results of a 10-year study in the Burdekin catchment, Australia. Rangel. J. 2014, 36, 67–84. [Google Scholar] [CrossRef]
- Mannetje, L.; Haydock, K.P. The dry-weight-rank method for the Botanical analysis of pasture. Grass Forage Sci. 1963, 18, 268–275. [Google Scholar] [CrossRef]
- Stockdale, C.R. Evaluation of techniques for estimating the yield of irrigated pastures intensively grazed by dairy cows. 2. The rising plate meter. Aust. J. Exp. Agric. 1984, 24, 305–311. [Google Scholar] [CrossRef]
- Lugassi, R.; Zaady, E.; Goldshleger, N.; Shoshany, M.; Chudnovsky, A. Spatial and Temporal Monitoring of Pasture Ecological Quality: Sentinel-2-Based Estimation of Crude Protein and Neutral Detergent Fiber Contents. Remote Sens. 2019, 11, 799. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Xiao, X.; Bajgain, R.; Starks, P.; Steiner, J.; Doughty, R.B.; Chang, Q. Estimating leaf area index and aboveground biomass of grazing pastures using Sentinel-1, Sentinel-2 and Landsat images. ISPRS J. Photogramm. Remote Sens. 2019, 154, 189–201. [Google Scholar] [CrossRef] [Green Version]
- Viljanen, N.; Honkavaara, E.; Näsi, R.; Hakala, T.; Niemeläinen, O.; Kaivosoja, J. A Novel Machine Learning Method for Estimating Biomass of Grass Swards Using a Photogrammetric Canopy Height Model, Images and Vegetation Indices Captured by a Drone. Agriculture 2018, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- Grüner, E.; Astor, T.; Wachendorf, M. Biomass prediction of heterogeneous temperate grasslands using an SFM approach based on UAV imaging. Agronomy 2019, 9, 54. [Google Scholar] [CrossRef] [Green Version]
- Gillan, J.K.; McClaran, M.P.; Swetnam, T.L.; Heilman, P. Estimating Forage Utilization with Drone-Based Photogrammetric Point Clouds. Rangel. Ecol. Manag. 2019, 72, 575–585. [Google Scholar] [CrossRef]
- Wijesingha, J.; Astor, T.; Schulze-Brüninghoff, D.; Wengert, M.; Wachendorf, M. Predicting Forage Quality of Grasslands Using UAV-Borne Imaging Spectroscopy. Remote Sens. 2020, 12, 126. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Dahlgren, R.; Larsen, R.; Devine, S.; Roche, L.; O’ Geen, A.; Wong, A.; Covello, S.; Jin, Y. Estimating Rangeland Forage Production Using Remote Sensing Data from a Small Unmanned Aerial System (sUAS) and PlanetScope Satellite. Remote Sens. 2019, 11, 595. [Google Scholar] [CrossRef] [Green Version]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: a new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef] [Green Version]
- O’Sullivan, M.; O’Keeffe, W.F.; Flynn, M.J. The Value of Pasture Height in the Measurement of Dry Matter Yield. Ir. J.Agric. Res. 1987, 26, 63–68. [Google Scholar]
- Harmoney, K.R.; Moore, K.J.; George, J.R.; Brummer, E.C.; Russell, J.R. Determination of Pasture Biomass Using Four Indirect Methods. Agron. J. 1997, 89, 665–672. [Google Scholar] [CrossRef]
- Oldham, J.; Smith, T. 7-Protein-energy interrelationships for growing and for lactating cattle. In Protein Contribution of Feedstuffs for Ruminants; Miller, E., Pike, I., Eds.; Butterworth-Heinemann: Oxford, UK, 1982; pp. 103–130. [Google Scholar] [CrossRef]
- Elliott, R.C.; Topps, J.H. Studies of protein requirements of ruminants: 2. Protein requirement for maintenance of three breeds of cattle. Br. J. Nutr. 1963, 17, 549–556. [Google Scholar] [CrossRef] [Green Version]
- Singh, L.; Mutanga, O.; Mafongoya, P.; Peerbhay, K. Remote sensing of key grassland nutrients using hyperspectral techniques in KwaZulu-Natal, South Africa. J. Appl. Remote Sens. 2017, 11, 036005. [Google Scholar] [CrossRef]
- Villamuelas, M.; Serrano, E.; Espunyes, J.; Fernández, N.; López-Olvera, J.R.; Garel, M.; Santos, J.; Parra-Aguado, M.Á.; Ramanzin, M.; Fernández-Aguilar, X.; et al. Predicting herbivore faecal nitrogen using a multispecies near-infrared reflectance spectroscopy calibration. PLoS ONE 2017, 12, e0176635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramoelo, A.; Cho, M. Explaining Leaf Nitrogen Distribution in a Semi-Arid Environment Predicted on Sentinel-2 Imagery Using a Field Spectroscopy Derived Model. Remote Sens. 2018, 10, 269. [Google Scholar] [CrossRef] [Green Version]
- Bureau of Meteorology. Climate Data Online. 2020. Available online: http://www.bom.gov.au/climate/data/ (accessed on 1 June 2020).
- Muir, J.; Schmidt, M.; Tindall, D.; Trevithick, R.; Scarth, P.; Stewart, J. Field Measurement of Fractional Ground Cover: A Technical Handbook Supporting Ground Cover Monitoring for Australia; Technical Report; The Queensland Department of Environment and Resource Management in collaboration with the Australian Bureau of Agricultural and Resource Economics and Sciences: Canberra, Australia, 2011.
- Terrestrial Ecosystem Research Network. Australian Data Discovery Portal. 2012. Available online: https://portal.tern.org.au/#/adba0b85 (accessed on 1 July 2020).
- Möller, J. Cereals, cereals-based products and animal feeding stuffs – determination of crude fat and total fat content by the Randall extraction method: a collaborative study. Qual. Assur. Saf. Crops Foods 2010, 2, 197–202. [Google Scholar] [CrossRef]
- Geoscience Australia. International GNSS Network. 2020. Available online: http://auscors.ga.gov.au/status/ (accessed on 30 July 2020).
- Pix4D. Pix4Dmapper Software Program. 2020. Available online: https://www.pix4d.com/ (accessed on 28 February 2020).
- Batistoti, J.; Marcato Junior, J.; Ítavo, L.; Matsubara, E.; Gomes, E.; Oliveira, B.; Souza, M.; Siqueira, H.; Salgado Filho, G.; Akiyama, T.; et al. Estimating Pasture Biomass and Canopy Height in Brazilian Savanna Using UAV Photogrammetry. Remote Sens. 2019, 11, 2447. [Google Scholar] [CrossRef] [Green Version]
- Leitão, J.P.; Moy de Vitry, M.; Scheidegger, A.; Rieckermann, J. Assessing the quality of digital elevation models obtained from mini unmanned aerial vehicles for overland flow modelling in urban areas. Hydrol. Earth Syst. Sci. 2016, 20, 1637–1653. [Google Scholar] [CrossRef] [Green Version]
- Malambo, L.; Popescu, S.; Murray, S.; Putman, E.; Pugh, N.; Horne, D.; Richardson, G.; Sheridan, R.; Rooney, W.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.J.; García-Ferrer, A.; Pérez-Porras, F.J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Graesser, J. GeoWombat Python Computer Language Package. 2020. Available online: https://github.com/jgrss/geowombat (accessed on 30 May 2020).
- Meer, P.; Mintz, D.; Rosenfeld, A.; Kim, D.Y. Robust regression methods for computer vision: A review. Int. J. Comput. Vis. 1991, 6, 59–70. [Google Scholar] [CrossRef]
- Olson, R.S.; Bartley, N.; Urbanowicz, R.J.; Moore, J.H. Evaluation of a Tree-Based Pipeline Optimization Tool for Automating Data Science. In Proceedings of the Genetic and Evolutionary Computation Conference 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 485–492. [Google Scholar] [CrossRef] [Green Version]
- Department of Agriculture and Fisheries. Pasture Photo Standards. 2020. Available online: https://futurebeef.com.au/knowledge-centre/pasture-photo-standards/ (accessed on 30 June 2020).
- Daimon, T. Box–Cox Transformation. In International Encyclopedia of Statistical Science; Lovric, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 176–178. [Google Scholar] [CrossRef]
- Lyons, M.B.; Keith, D.A.; Phinn, S.R.; Mason, T.J.; Elith, J. A comparison of resampling methods for remote sensing classification and accuracy assessment. Remote Sens. Environ. 2018, 208, 145–153. [Google Scholar] [CrossRef]
- Cooper, S.; Roy, D.; Schaaf, C.; Paynter, I. Examination of the Potential of Terrestrial Laser Scanning and Structure-from-Motion Photogrammetry for Rapid Nondestructive Field Measurement of Grass Biomass. Remote Sens. 2017, 9, 531. [Google Scholar] [CrossRef] [Green Version]
- Muir, J.; Goodwin, N.; Armston, J.; Phinn, S.; Scarth, P. An Accuracy Assessment of Derived Digital Elevation Models from Terrestrial Laser Scanning in a Sub-Tropical Forested Environment. Remote Sens. 2017, 9, 843. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Ustin, S. Manual Of Remote Sensing/Remote Sensing For Natural Resource Management And Environmental Monitoring; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Rickert, K.; Stuth, J.; McKeon, G. Modelling Pasture and Animal Production. In Field and Laboratory Methods for Grassland and Animal Production Research; CABI Publishing: New York, NY, USA, 2000; Chapter 3; pp. 29–66. [Google Scholar] [CrossRef]
- McKeon, G.; Ash, A.; Hall, W.; Smith, M.S. Simulation of Grazing Strategies for Beef Production in North-East Queensland. In Applications of Seasonal Climate Forecasting in Agricultural and Natural Ecosystems; Hammer, G.L., Nicholls, N., Mitchell, C., Eds.; Springer: Dordrecht, The Netherlands, 2000; pp. 227–252. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Navarro, J.A.; Algeet, N.; Fernández-Landa, A.; Esteban, J.; Rodríguez-Noriega, P.; Guillén-Climent, M.L. Integration of UAV, Sentinel-1, and Sentinel-2 Data for Mangrove Plantation Aboveground Biomass Monitoring in Senegal. Remote Sens. 2019, 11, 77. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Woodlands | |
|---|---|
| Subcategories | Savanna (SW) & Subtropical woodlands (STW) |
| Common pasture species | Heteropogen sp., Bothriochloa sp., Eragrostis sp., Aristida sp., Chloris and Chrysopogon sp’s. |
| Associated vegetation | Eucalyptus melanophloia, E. crebra, E. maculata & E. teticornis |
| Soil types | Sandy loam to clay loam |
| No. of field sites | 9 |
| Grasslands | |
| Subcategories | Mitchell (MG) & Arid (AG) Grasslands |
| Common pasture species | Astebla sp. & Iseilema sp. (MG) & Enneapogon sp., Aristida sp. & Cenchrus sp. (AG) grass species |
| Associated vegetation | Various forbs and ephemeral grasses (MG) & numerous Acacia sps. most commonly A.aneura |
| Soil types | Dark cracking clay (MG) to sandy red earths (AG) |
| No. of field sites | 10 |
| Sampling campaigns | |
| Campaign 1 | 13, 16, 20, 22 March 2019 (4 sites) |
| Campaign 2 | 20, 25, 26 May 2019 (3 sites) |
| Campaign 3 | 20 June 2019 (1 site) |
| Campaign 4 | 6 August 2019 (1 site) |
| Campaign 5 | 14, 16 October 2019 (2 sites) |
| Campaign 6 | 25, 26 February 2020 & 6, 7, 12, 13, 16, 17 March 2020 (8 sites) |
| Equipment | |
|---|---|
| Aircraft | DJI M600ProTM |
| Gimbal | DJI Ronin-MXTM |
| Photogrammetry | |
| Camera | Sony Alpha 7R IITM |
| Trigger | intelliGTM wifi sync trigger |
| Lens | 24 mm; aperture priority |
| Sensor | 42 mpx; 35 mm full frame; RGB |
| Image format | JPEG file format; 15 MB per image; bit depth RGB (14) |
| Flying height | ∼50 m |
| Image size | 9-10 mm ground sampling; 75 × 50 m footprints |
| Ground speed | 1.5–2m/s |
| Image count | ∼270 per site at nadir |
| Image forward & side overlap | 85% |
| Flight time | 20–30 min |
| Flight pattern | Grid in north/south alignment; stop and turn at ends |
| Hyperspectral | |
| Sensor | Corning microHSI 410 SHARKTM |
| Trigger | Bounding area box |
| Pixel size | 9–10 mm ground sampling; 682 × 40000 pixel array |
| Swath width | 25.49 m |
| Flying height | ∼50 m |
| Oversampling | 1.0 |
| Spectral range | 400 to 1000 nm +/− 1% |
| Spectral bin size | 4 nm; 150 bands |
| Image format | 682 × 40,000 pixels; 15 GB; envi HSI image format |
| Frame rate | 160 Hz |
| Average exposure | 6000 |
| Lens | 16 mm; f-stop 1.4; zoom ∞ |
| Ground speed | 5.86 m/s |
| Flight time | 10–20 min |
| Flight pattern | Area scan in east/west alignment; 5 m end lead in distance & 5 m side overlap |
| Pix4D SfM photogrammetry | |
|---|---|
| Keypoints image scale | Full |
| Point cloud densification | Original image size |
| Minimum no. of matches | 3 |
| Point density | Optimal |
| Resolution | 1 × GSD |
| DSM filters | Noise filtering; sharp surface smoothing |
| Hyperspectral Ortho-rectification | |
| PARGE raw scan import | Conversion from BIL to BSQ |
| Raw navigation file | Non-DGPS GNSS L1 band receiver; Coordinate system: geographic; datum: WGS84 |
| IGM cube processing | Resampling method: Fast nearest neighbour; Exclusion/fill pixel distance: 1 pixel |
| Processing resources | |
| Desktop computing details | 128 GB RAM; 64 CPU threads; 1 × GeoForce RTX 2080 Ti GPU; 1TB M.2 SSD |
| Parameter | |
|---|---|
| Generations | 1000 |
| No. of jobs | 5 |
| Population size | 100 |
| Random state | 42 |
| Config dictionary | default (all regression models) |
| GCP | x1 | y1 | z1 | x2 | y2 | z2 | x3 | y3 | z3 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 456243.400 | 6974635.912 | 88.162 | 456243.445 | 6974635.937 | 88.137 | −0.044 | −0.024 | 0.025 |
| 2 | 456237.163 | 6974586.501 | 91.709 | 456237.187 | 6974586.475 | 91.672 | −0.023 | 0.026 | 0.037 |
| 3 | 456194.435 | 6974644.939 | 85.752 | 456194.468 | 6974644.965 | 85.753 | −0.032 | −0.025 | −0.001 |
| 4 | 456249.303 | 6974685.550 | 85.853 | 456249.312 | 6974685.553 | 85.915 | −0.008 | −0.002 | −0.062 |
| 5 | 456280.424 | 6974602.521 | 90.421 | 456280.444 | 6974602.505 | 90.477 | −0.019 | 0.016 | −0.056 |
| 6 | 456206.564 | 6974669.454 | 85.191 | 456206.622 | 6974669.448 | 85.242 | −0.057 | 0.006 | −0.051 |
| 7 | 456292.393 | 6974626.093 | 89.108 | 456292.419 | 6974626.051 | 89.16 | −0.025 | 0.042 | −0.052 |
| 8 | 456197.051 | 6974617.439 | 87.549 | 456197.095 | 6974617.413 | 87.629 | −0.043 | 0.026 | −0.08 |
| Average | - | - | — | - | - | — | −0.032 | 0.007 | −0.03 |
| Nutrient Quality Measure | Spectral Feature | Transformation | B1 | B2 | r2 |
|---|---|---|---|---|---|
| ADF | Single-band | Original | 667.82 nm | - | 0.648 |
| Normalised | 651.81 nm | - | 0.896 | ||
| First derivative | 543.78 nm | - | 0.466 | ||
| CP | Single-band | Original | 759.85 nm | - | 0.160 |
| Normalised | 759.85 nm | - | 0.502 | ||
| First derivative | 551.78 nm | - | 0.287 | ||
| ADF | Simple ratio | Original | 655.82 nm | 919.91 nm | 0.897 |
| Normalised | 655.82 nm | 919.91 nm | 0.897 | ||
| First derivative | 667.82 nm | 475.75 nm | 0.794 | ||
| CP | Simple ratio | Original | 947.92 nm | 939.92 nm | 0.745 |
| Normalised | 947.92 nm | 939.92 nm | 0.745 | ||
| First derivative | 947.92 nm | 939.92 nm | 0.625 | ||
| ADF | NDSI | Original | 651.81 nm | 939.92 nm | 0.903 |
| Normalised | 651.81 nm | 939.92 nm | 0.903 | ||
| First derivative | 475.75 nm | 667.82 nm | 0.792 | ||
| CP | NDSI | Original | 939.92 nm | 947.92 nm | 0.742 |
| Normalised | 939.92 nm | 947.92 nm | 0.742 | ||
| First derivative | 939.92 nm | 947.92 nm | 0.624 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barnetson, J.; Phinn, S.; Scarth, P. Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands. AgriEngineering 2020, 2, 523-543. https://doi.org/10.3390/agriengineering2040035
Barnetson J, Phinn S, Scarth P. Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands. AgriEngineering. 2020; 2(4):523-543. https://doi.org/10.3390/agriengineering2040035
Chicago/Turabian StyleBarnetson, Jason, Stuart Phinn, and Peter Scarth. 2020. "Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands" AgriEngineering 2, no. 4: 523-543. https://doi.org/10.3390/agriengineering2040035
APA StyleBarnetson, J., Phinn, S., & Scarth, P. (2020). Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands. AgriEngineering, 2(4), 523-543. https://doi.org/10.3390/agriengineering2040035