Detection of Black Spot of Rose Based on Hyperspectral Imaging and Convolutional Neural Network

Abstract
:1. Introduction
2. Materials and Methods
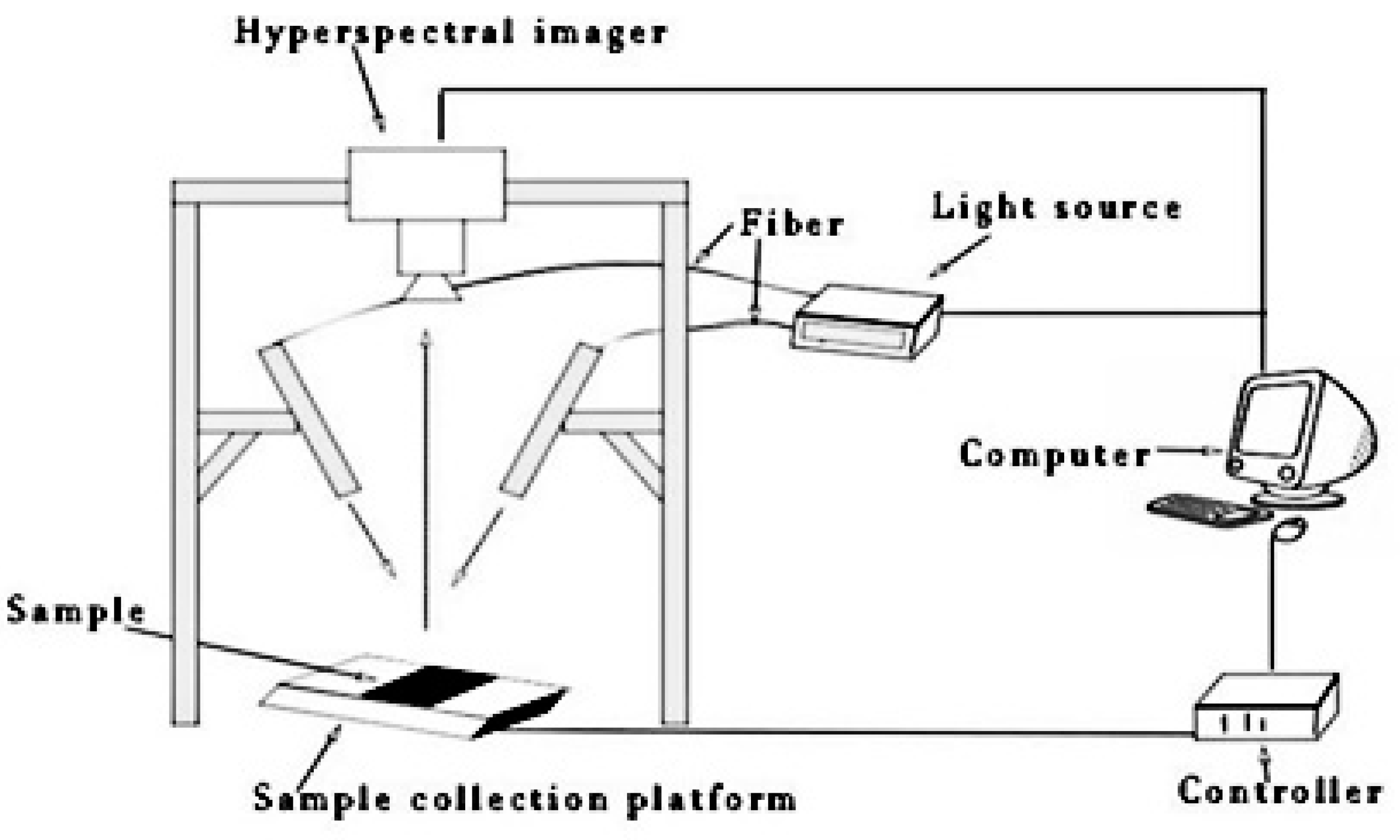
2.1. Hyperspectral Imaging System
2.2. Plant Samples
2.3. Hyperspectral Imaging Acquisition and Calibration
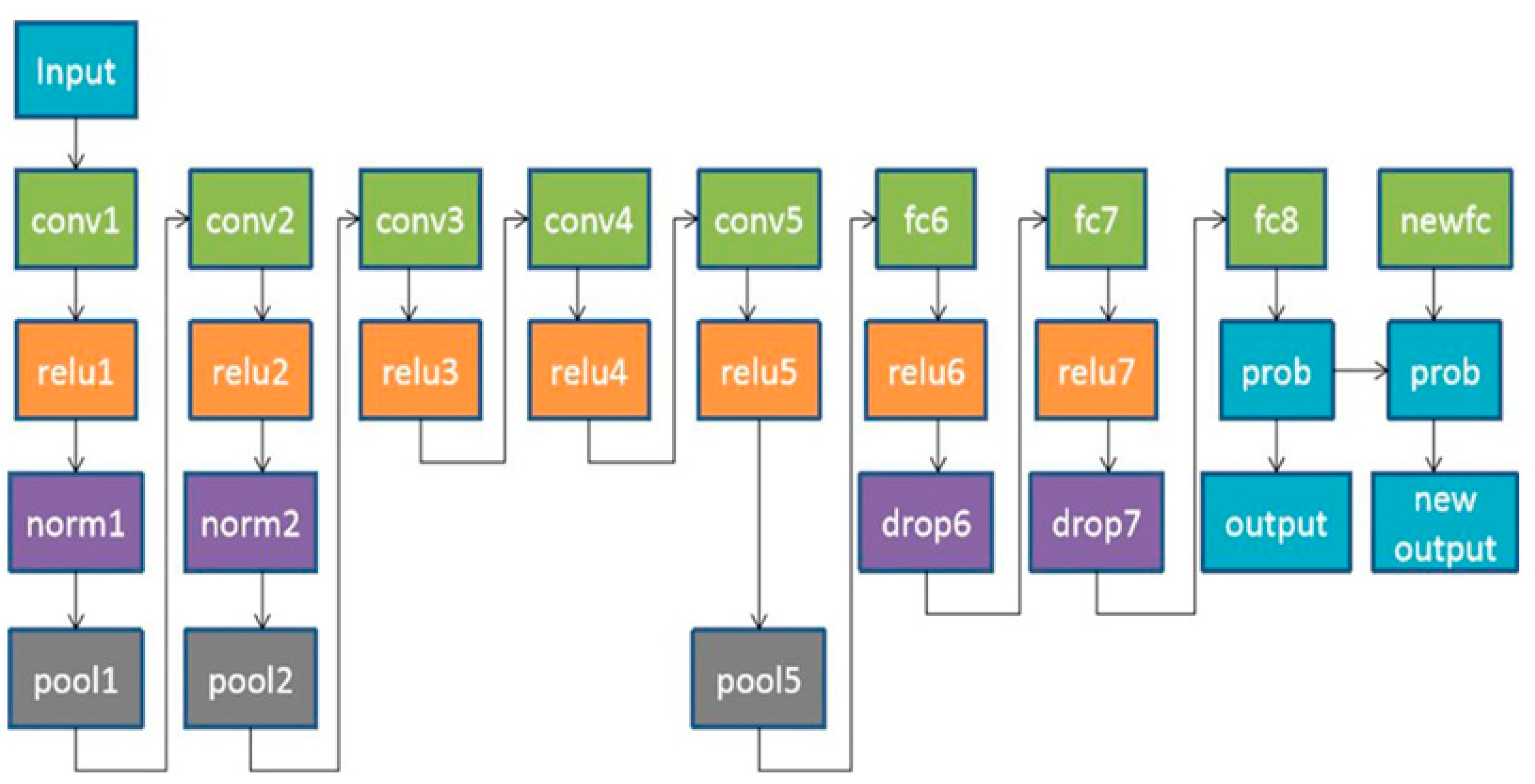
2.4. CNN Models for Detection
- (1)
- Small convolution kernel. The author replaced all convolution kernels with 3 × 3 (rarely used 1 × 1).
- (2)
- Small pooled core. Compared with AlexNet’s 3 × 3 pooled cores, VGG are all 2 × 2 pooled cores.
- (3)
- Fully connected to convolution. The network test phase replaces the three full connections in the training phase with three convolutions. The test reuses the parameters during training, so that the full convolutional network obtained by the test does not have the limit of full connection, so it can receive any width or height input.
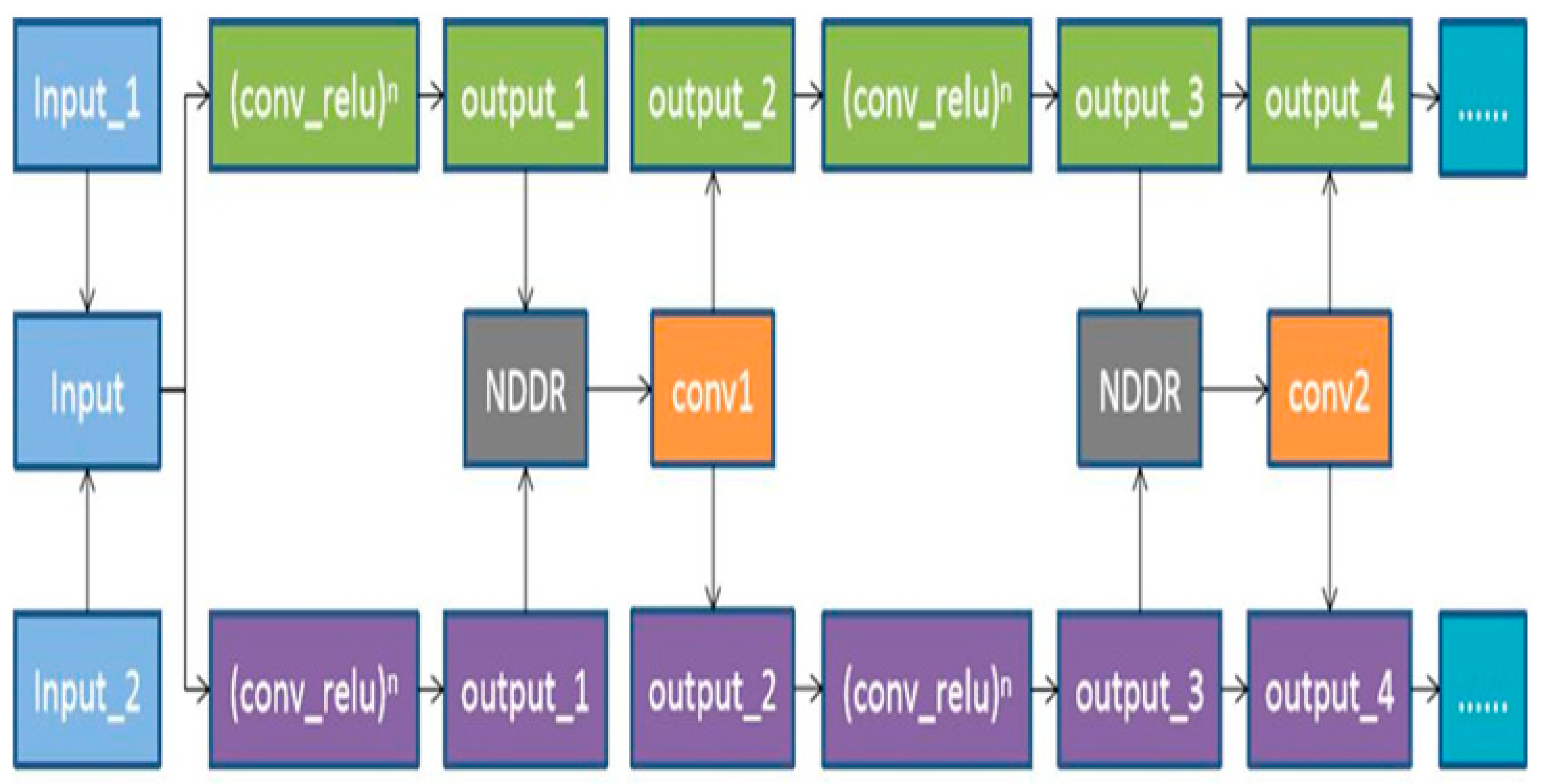
- (1)
- NDDR layer. Used for multi-task feature fusion and feature dimensionality reduction. When the features of different layers of multiple tasks enter the NDDR layer, NDDR will first stitch all the incoming features in the last dimension, and then convolve the obtained features separately for each task. After completing the convolution, the obtained feature shapes are respectively input into the original network for convolution operation.
- (2)
- Shortcuts. In order to prevent the gradient of the lower layer from disappearing, the Shortcuts module is used to directly pass the gradient from the last layer to the lower layer. Each mainline task will receive the feature from the NDDR layer multiple times. The Shortcuts layer of each task resplices multiple NDDR-features received by this task according to the last NDDR-feature and then stitches them together.
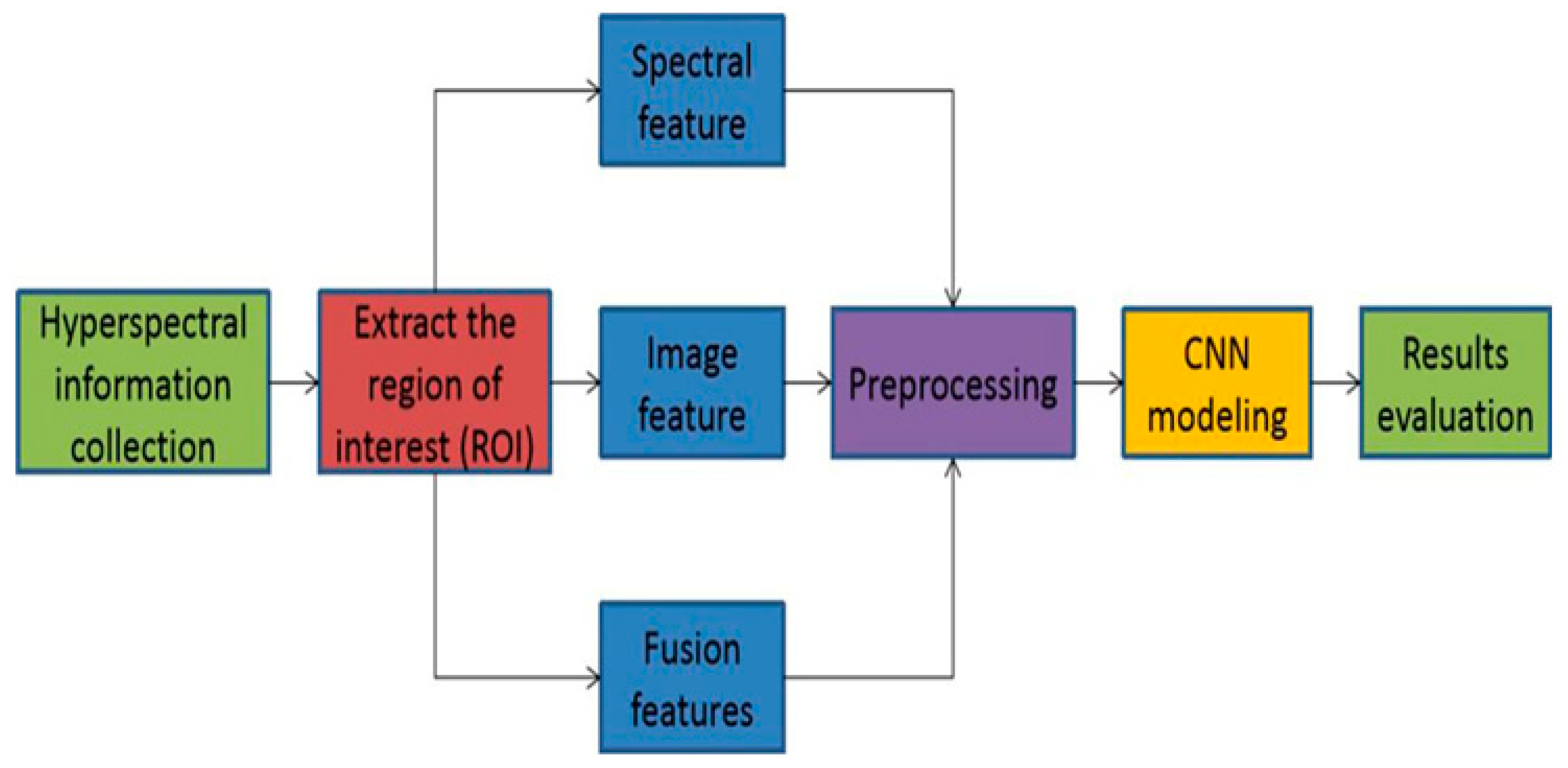
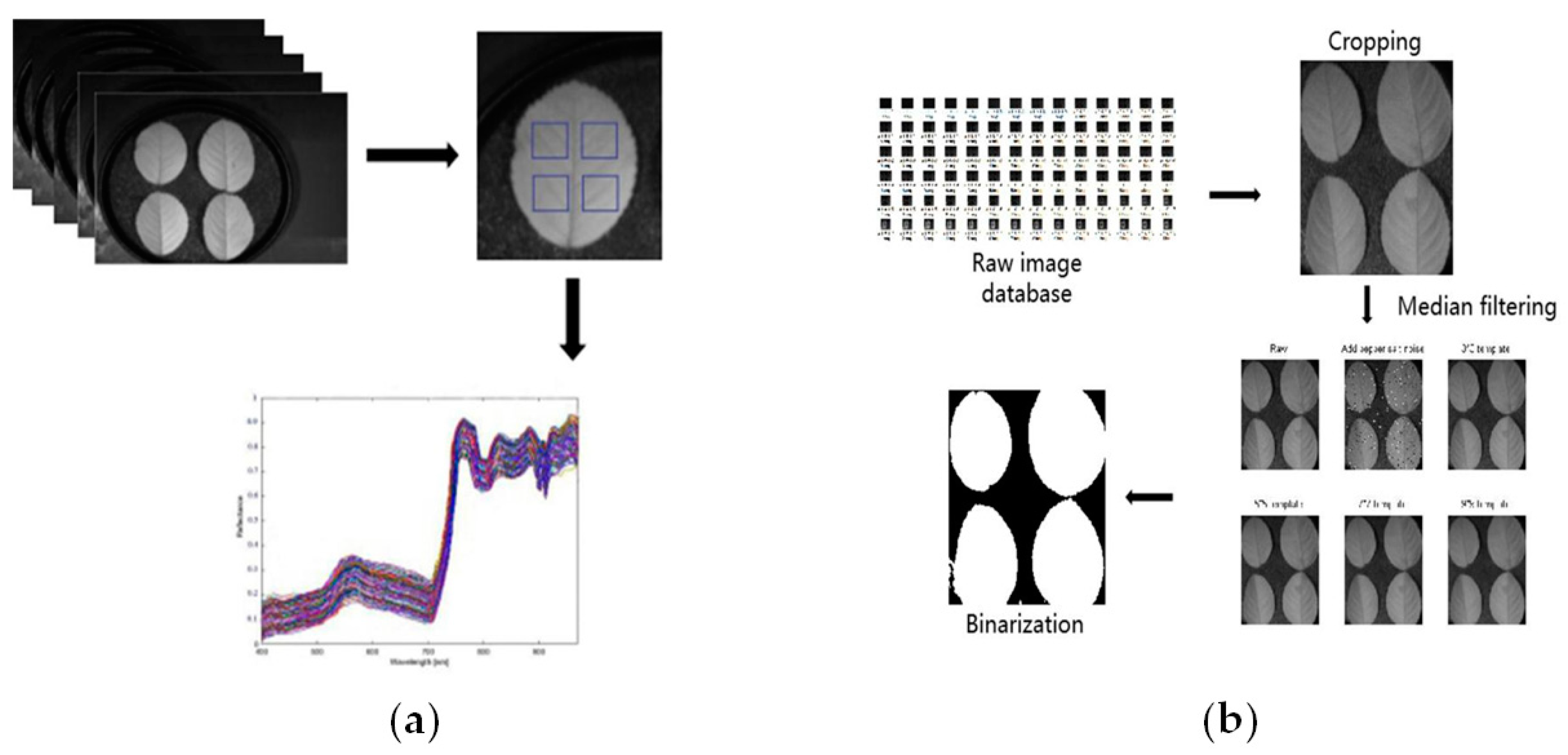
2.5. Data Processing
2.6. Analysis
3. Results and Discussion
3.1. Optimizer Algorithm in the CNN Model
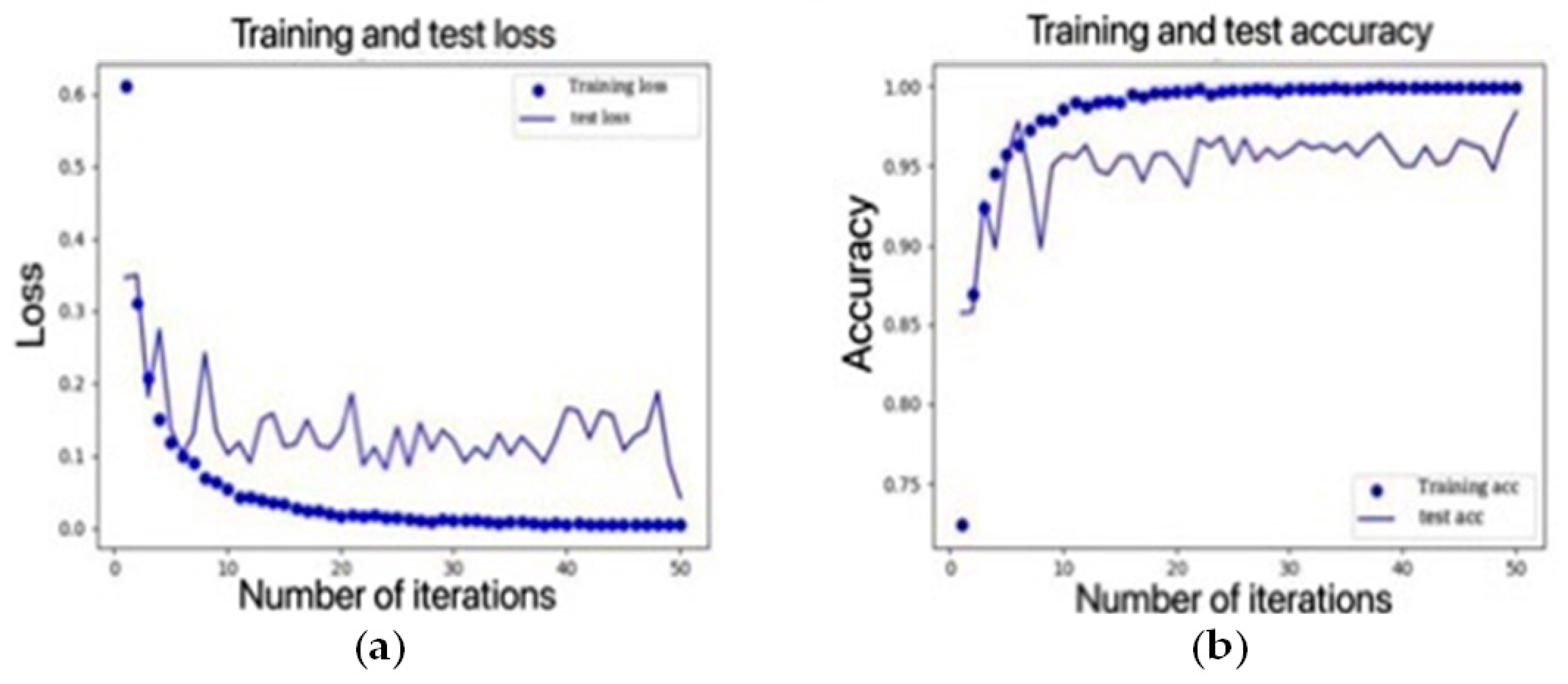
3.2. The Test Result of CNN
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Palou, L.; Taberner, V.; Guardado, A.; Montesinos-Herrero, C. First report of Alternaria alternatacausing postharvest black spot of persimmon in Spain. Australas. Plant Dis. Notes 2012, 7, 41–42. [Google Scholar] [CrossRef] [Green Version]
- Debener, T. The beast and the beauty: What do we know about black spot in roses? Crit. Rev. Plant Sci. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Blechert, O.; Debener, T. Morphological characterization of the interaction between Diplocarpon rosae and various rose species. Plant Pathol. 2005, 54, 82–90. [Google Scholar] [CrossRef]
- Zurn, J.D.; Zlesak, D.; Holen, M.; Bradeen, J.M.; Hokanson, S.C.; Bassil, N.V. Mapping a Novel Black Spot Resistance Locus in the Climbing Rose Brite Eyes™ (‘RADbrite’). Front. Plant Sci. 2018, 9, 1730. [Google Scholar] [CrossRef]
- Nagasubramanian, K.; Jones, S.; Singh, A.K.; Sarkar, S.; Singh, A.; Ganapathysubramanian, B. Plant disease identification using explainable 3D deep learning on hyperspectral images. Plant Methods 2019, 15, 98. [Google Scholar] [CrossRef]
- Ju, Y.; Li, C.; Shen, P.; Wan, N.; Han, W.; Pan, Y. Rapid and visual detection of Verticillium dahliae using recombinase polymerase amplification combined with lateral flow dipstick. Crop Prot. 2020, 136, 105226. [Google Scholar] [CrossRef]
- Shi, Y.; Jin, Z.; Meng, X.; Wang, L.; Xie, X.; Chai, A.; Li, B. Development and evaluation of a loop-mediated isothermal amplification assay for the rapid detection and identification of pectobacterium carotovorum on celery in the field. Hortic. Plant J. 2020, 6, 313–320. [Google Scholar] [CrossRef]
- Bandamaravuri, K.; Nayak, A.; Bandamaravuri, A.; Samad, A. Simultaneous detection of downy mildew and powdery mildew pathogens on Cucumis sativus and other cucurbits using duplex-qPCR and HRM analysis. AMB Express 2020, 10, 1–11. [Google Scholar] [CrossRef]
- Muzhinji, N.; Dube, J.P.; de Haan, E.G.; Woodhall, J.W.; van der Waals, J.E. Development of a TaqMan PCR assay for specific detection and quantification of Pectobacterium brasiliense in potato tubers and soil. Eur. J. Plant Pathol. 2020, 158, 521–532. [Google Scholar] [CrossRef]
- Roscher, R.; Behmann, J.; Mahlein, A.-K.; Dupuis, J.; Kuhlmann, H.; Plümer, L. Detection of disease symptoms on hyperspectral 3D plant models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 88–96. [Google Scholar]
- Ban, S.T.; Tian, M.L.; Chang, Q.R. Estimating the severity of apple mosaic disease with hyperspectral images. Int. J. Agric. Biol. Eng. 2019, 12, 148–153. [Google Scholar] [CrossRef]
- Mahlein, A.K.; Kuska, M.T.; Behmann, J.; Polder, G.; Walter, A. Hyperspectral sensors and imaging technologies in phytopathology: State of the art. Annu. Rev. Phytopathol. 2018, 56, 535–558. [Google Scholar] [CrossRef] [PubMed]
- Mehrubeoglu, M.; Orlebeck, K.; Zemlan, M.J.; Autran, W. Detecting red blotch disease in grape leaves using hyperspectral imaging. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXII; SPIE: Baltimore, MD, USA, 2016. [Google Scholar]
- Ahmadi, P.; Muharam, F.M.; Ahmad, K.; Mansor, S.; Abu Seman, I. Early detection of ganoderma basal stem rot of oil palms using artificial neural network spectral analysis. Plant Dis. 2017, 101, 1009–1016. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdulridha, J.; Ehsani, R.; Castro, A. Detection and differentiation between laurel wilt disease, phytophthora disease, and salinity damage using a hyperspectral sensing technique. Agriculture 2016, 6, 56. [Google Scholar] [CrossRef] [Green Version]
- Ropelewska, E.; Zapotoczny, P. Classification of Fusarium-infected and healthy wheat kernels based on features from hyperspectral images and flatbed scanner images: A comparative analysis. Eur. Food Res. Technol. 2018, 2018, 1453–1462. [Google Scholar] [CrossRef] [Green Version]
- Fajardo, J.U.; Andrade, O.B.; Bonilla, R.C.; Cevallos-Cevallos, J.; Mariduena-Zavala, M.; Donoso, D.O.; Villardón, J.L.V. Early detection of black Sigatoka in banana leaves using hyperspectral images. Appl. Plant Sci. 2020, 8, 8. [Google Scholar]
- Wahabzada, M.; Mahlein, A.K.; Bauckhage, C.; Steiner, U.; Oerke, E.-C.; Kersting, K. Metro maps of plant disease dynamics—Automated mining of differences using hyperspectral images. PLoS ONE 2015, 10, e0116902. [Google Scholar] [CrossRef]
- Hariharan, J.; Fuller, J.; Ampatzidis, Y.; Abdulridha, J.; Lerwill, A. Finite difference analysis and bivariate correlation of hyperspectral data for detecting laurel wilt disease and nutritional deficiency in avocado. Remote. Sens. 2019, 11, 1748. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Lin, F.; Huang, Y.; Zhang, L. Detection of wheat powdery mildew by differentiating background factors using hyperspectral imaging. Int. J. Agric. Biol. 2016, 18, 747–756. [Google Scholar] [CrossRef]
- Xie, C.Q.; Yang, C.; He, Y. Hyperspectral imaging for classification of healthy and gray mold diseased tomato leaves with different infection severities. Comput. Electron. Agric. 2017, 135, 154–162. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Chen, J.C.; Fu, X.P.; Ye, Y.F.; Fu, G.; Hong, R.X. Hyperspectral imaging detection of cercospora leaf spot of muskmelon. Spectrosc. Spectr. Anal. 2019, 10, 3184–3188. [Google Scholar]
- Chen, T.; Yang, W.; Zhang, H.; Zhu, B.; Zeng, R.; Wang, X.; Wang, S.; Wang, L.; Qi, H.; Lan, Y.; et al. Early detection of bacterial wilt in peanut plants through leaf-level hyperspectral and unmanned aerial vehicle dat. Comput. Electron. Agric. 2020, 177, 105708. [Google Scholar] [CrossRef]
- Garhwal, A.S.; Pullanagari, R.R.; Li, M.; Reis, M.M.; Archer, R. Hyperspectral imaging for identification of Zebra Chip disease in potatoes. Biosyst. Eng. 2020, 197, 306–317. [Google Scholar] [CrossRef]
- Park, S.H.; Hong, Y.; Shuaibu, M.; Kim, S.; Lee, W.S. Detection of apple marssonina blotch with PLSR, PCA, and LDA using outdoor hyperspectral imaging. Spectrosc. Spectr. Anal. 2020, 40, 319–324. [Google Scholar]
- Fallon, B.; Yang, A.; Lapadat, C.; Armour, I.; Juzwik, J.; Montgomery, R.A.; Cavender-Bares, J. Spectral differentiation of oak wilt from foliar fungal disease and drought is correlated with physiological changes. Tree Physiol. 2020, 40, 377–390. [Google Scholar] [CrossRef]
- Bohnenkamp, D.; Kuska, M.T.; Mahlein, A.K.; Behmann, J. Hyperspectral signal decomposition and symptom detection of wheat rust disease at the leaf scale using pure fungal spore spectra as reference. Plant. Pathol. 2019, 68, 1188–1195. [Google Scholar] [CrossRef]
- Zhang, G.; Xu, T.; Tian, Y.; Xu, H.; Song, J.; Lan, Y. Assessment of rice leaf blast severity using hyperspectral imaging during late vegetative growth. Australas. Plant Pathol. 2020, 49, 1–8. [Google Scholar] [CrossRef]
- Pan, T.-T.; Chyngyz, E.; Sun, D.-W.; Paliwal, J.; Pu, H. Pathogenetic process monitoring and early detection of pear black spot disease caused by Alternaria alternata using hyperspectral imaging. Postharvest Biol. Technol. 2019, 154, 96–104. [Google Scholar] [CrossRef]
- Dai, L.R.; Zhang, S.L. Deep speech signal and information processing: Research progress and prospects. Data Acquis. Process. 2014, 29, 171–179. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variety | Treatments | Training Size | Testing Size |
|---|---|---|---|
| 12–26(Susceptible) | Health | 360 | 90 |
| Infection | 360 | 90 | |
| Total | 720 | 180 | |
| 13–54(Resistant) | Health | 360 | 90 |
| Infection | 360 | 90 | |
| Total | 720 | 180 |
| Loss Function | Train_Loss | Train_Accuracy (%) | Test_Loss | Test_Accuracy (%) |
|---|---|---|---|---|
| categorical_crossentropy | 0.2231 | 95.63 | 0.2277 | 92.95 |
| mean_squared_error | 0.0910 | 92.05 | 0.1107 | 89.50 |
| mean_absolute_error | 0.1433 | 90.84 | 0.2122 | 85.75 |
| mean_squared_logarithmic_error | 0.0464 | 87.12 | 0.0557 | 83.95 |
| hinge | 0.6555 | 85.83 | 0.7040 | 80.10 |
| Learning Rate | Train_Loss | Train_Accuracy (%) | Test_Loss | Test_Accuracy (%) |
|---|---|---|---|---|
| 0.00009 | 0.2994 | 86.50 | 0.3269 | 83.75 |
| 0.0001 | 0.2523 | 90.50 | 0.2810 | 87.10 |
| 0.0002 | 0.2485 | 88.92 | 0.2903 | 87.30 |
| 0.0003 | 0.2766 | 87.87 | 0.2854 | 99.05 |
| 0.0004 | 0.2231 | 98.63 | 0.2277 | 97.75 |
| 0.0005 | 0.2599 | 92.68 | 0.2429 | 92.40 |
| 0.0006 | 0.2352 | 96.87 | 0.3297 | 90.95 |
| 0.001 | 0.2633 | 98.35 | 0.2528 | 93.30 |
| 0.01 | 0.6940 | 79.53 | 0.6932 | 80.00 |
| AlexNet | |||
|---|---|---|---|
| Variety | Data Set | Train_Accuracy (%) | Test_Accuracy (%) |
| 12–26 (Susceptible) | Raw | 92.36 | 89.58 |
| Raw + MSC | 96.53 | 95.83 | |
| Raw + SNV | 100 | 97.92 | |
| 13–54 (Resistant) | Raw | 87.50 | 83.33 |
| Raw + MSC | 95.83 | 93.75 | |
| Raw + SNV | 94.44 | 91.67 | |
| VGG16 | |||
| Variety | Data Set | Train_Accuracy (%) | Test_Accuracy (%) |
| 12–26 (Susceptible) | Raw | 97.40 | 90.95 |
| Raw + preprocessing | 99.60 | 97.20 | |
| 13–54 (Resistant) | Raw | 97.10 | 93.53 |
| Raw + preprocessing | 98.80 | 97.12 | |
| NDDR-CNN | |||
| Variety | Data Set | Train_Accuracy (%) | Test_Accuracy (%) |
| 12–26 (Susceptible) | Raw | 98.50 | 98.95 |
| Raw + SNV + preprocessing | 100.00 | 99.63 | |
| 13–54 (Resistant) | Raw | 97.87 | 96.57 |
| Raw + MSC + preprocessing | 99.95 | 99.10 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Pang, L.; Yan, L.; Xiao, J. Detection of Black Spot of Rose Based on Hyperspectral Imaging and Convolutional Neural Network. AgriEngineering 2020, 2, 556-567. https://doi.org/10.3390/agriengineering2040037
Ma J, Pang L, Yan L, Xiao J. Detection of Black Spot of Rose Based on Hyperspectral Imaging and Convolutional Neural Network. AgriEngineering. 2020; 2(4):556-567. https://doi.org/10.3390/agriengineering2040037
Chicago/Turabian StyleMa, Jingjing, Lei Pang, Lei Yan, and Jiang Xiao. 2020. "Detection of Black Spot of Rose Based on Hyperspectral Imaging and Convolutional Neural Network" AgriEngineering 2, no. 4: 556-567. https://doi.org/10.3390/agriengineering2040037
APA StyleMa, J., Pang, L., Yan, L., & Xiao, J. (2020). Detection of Black Spot of Rose Based on Hyperspectral Imaging and Convolutional Neural Network. AgriEngineering, 2(4), 556-567. https://doi.org/10.3390/agriengineering2040037