



UAV-Based Wireless Data Collection from Underground Sensor Nodes for Precision Agriculture


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
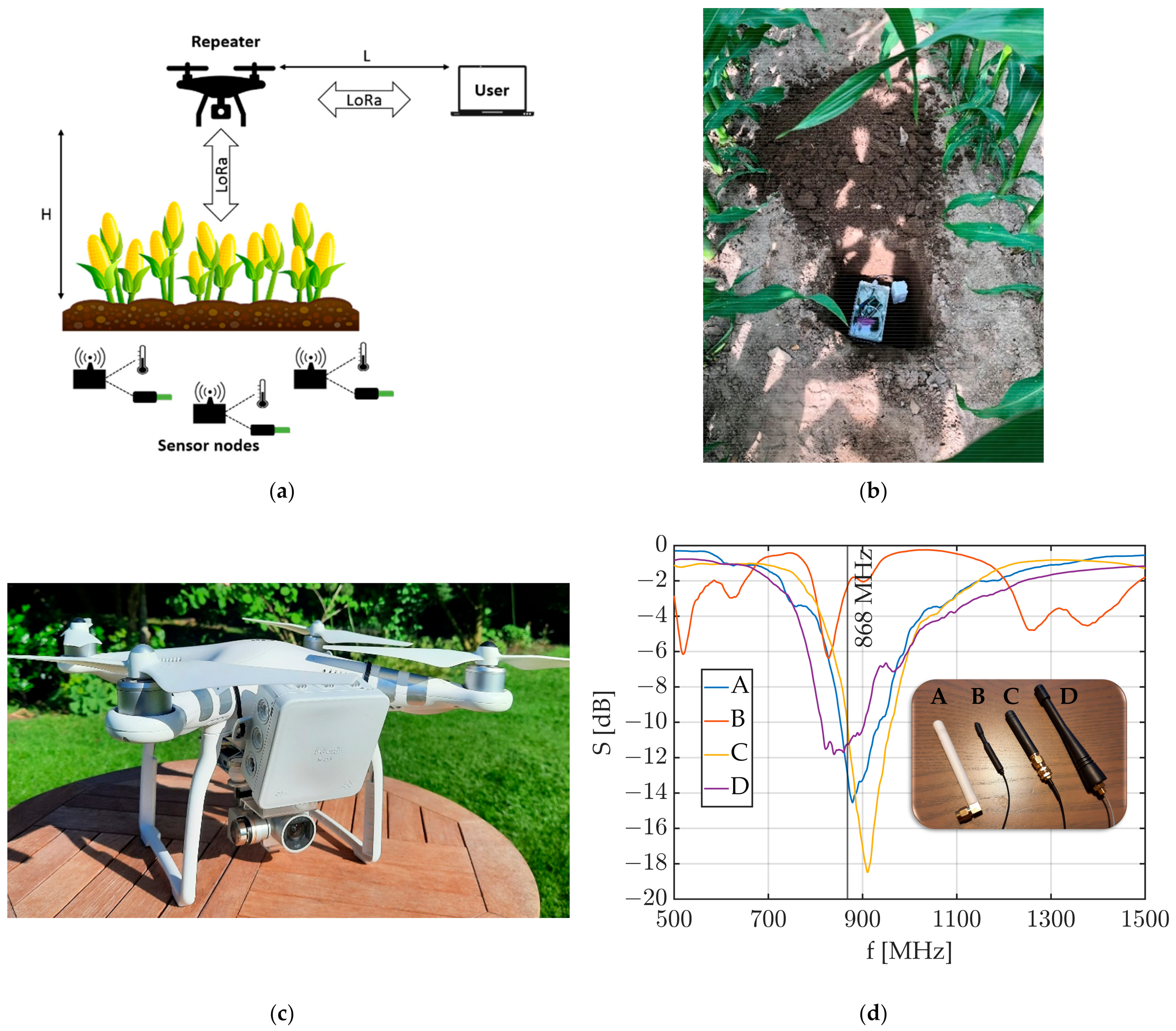
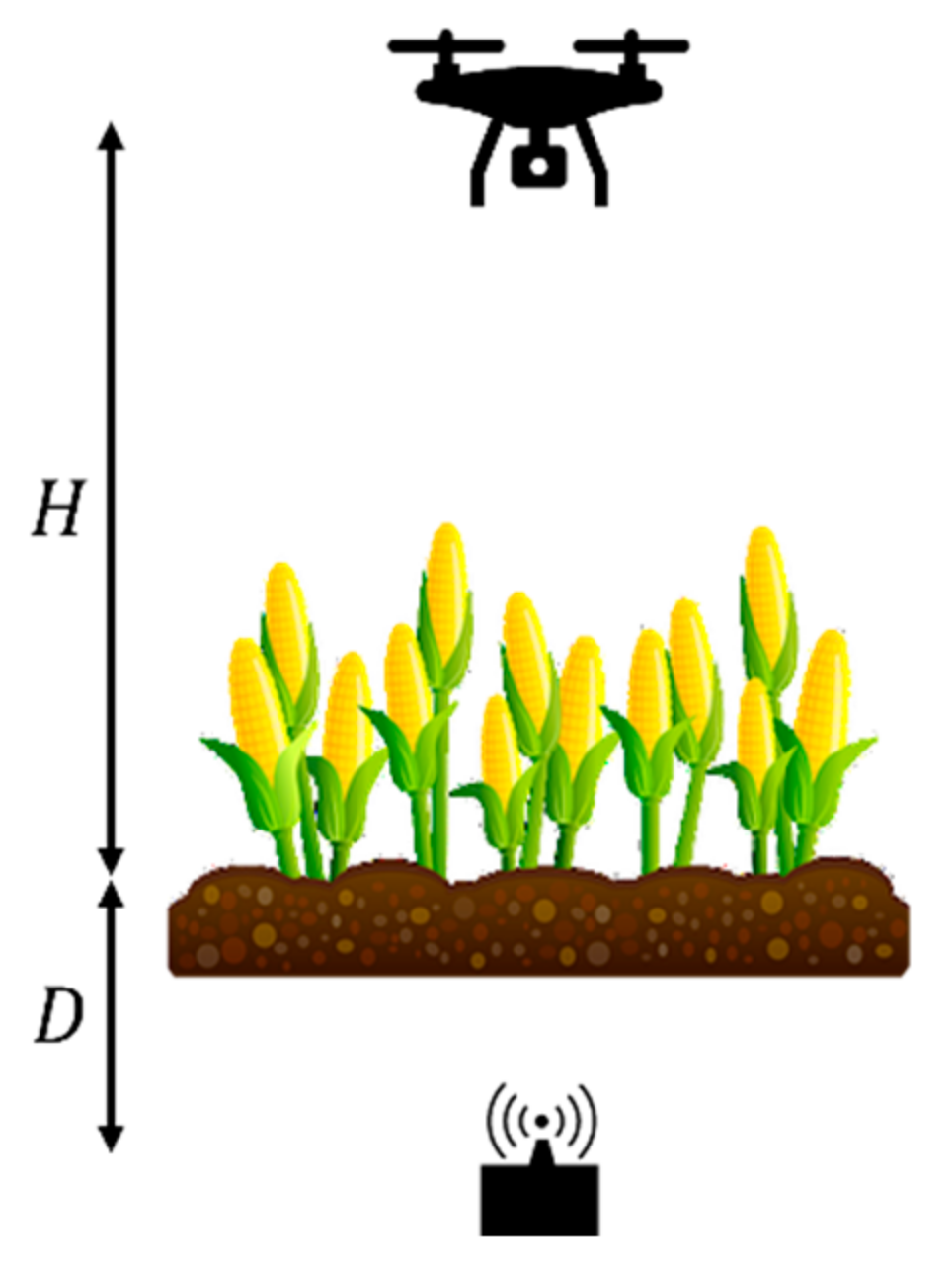
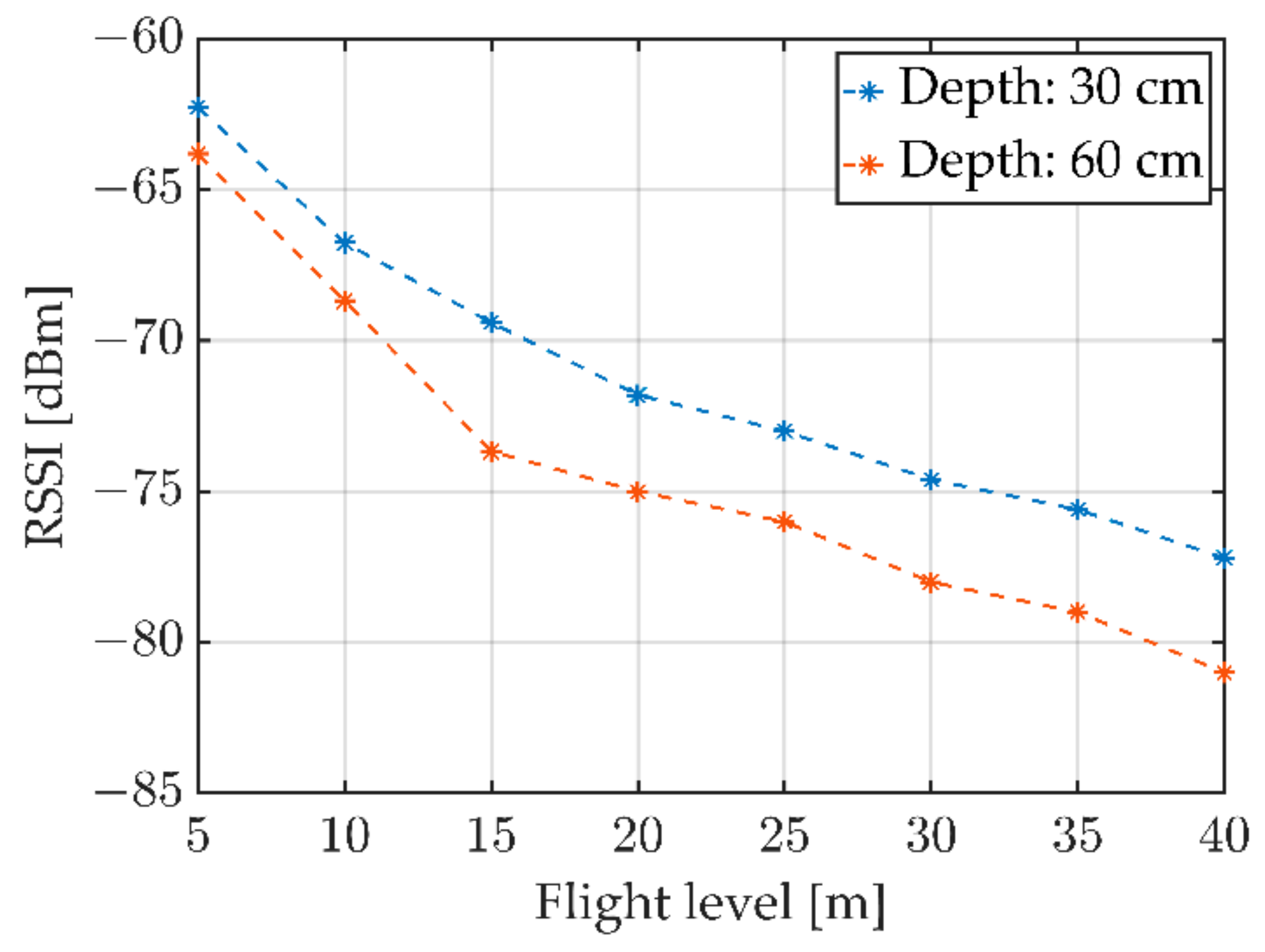
- Dependency of received LoRa signal strength on flight height of the drone and on the burial depth of the sensor node.
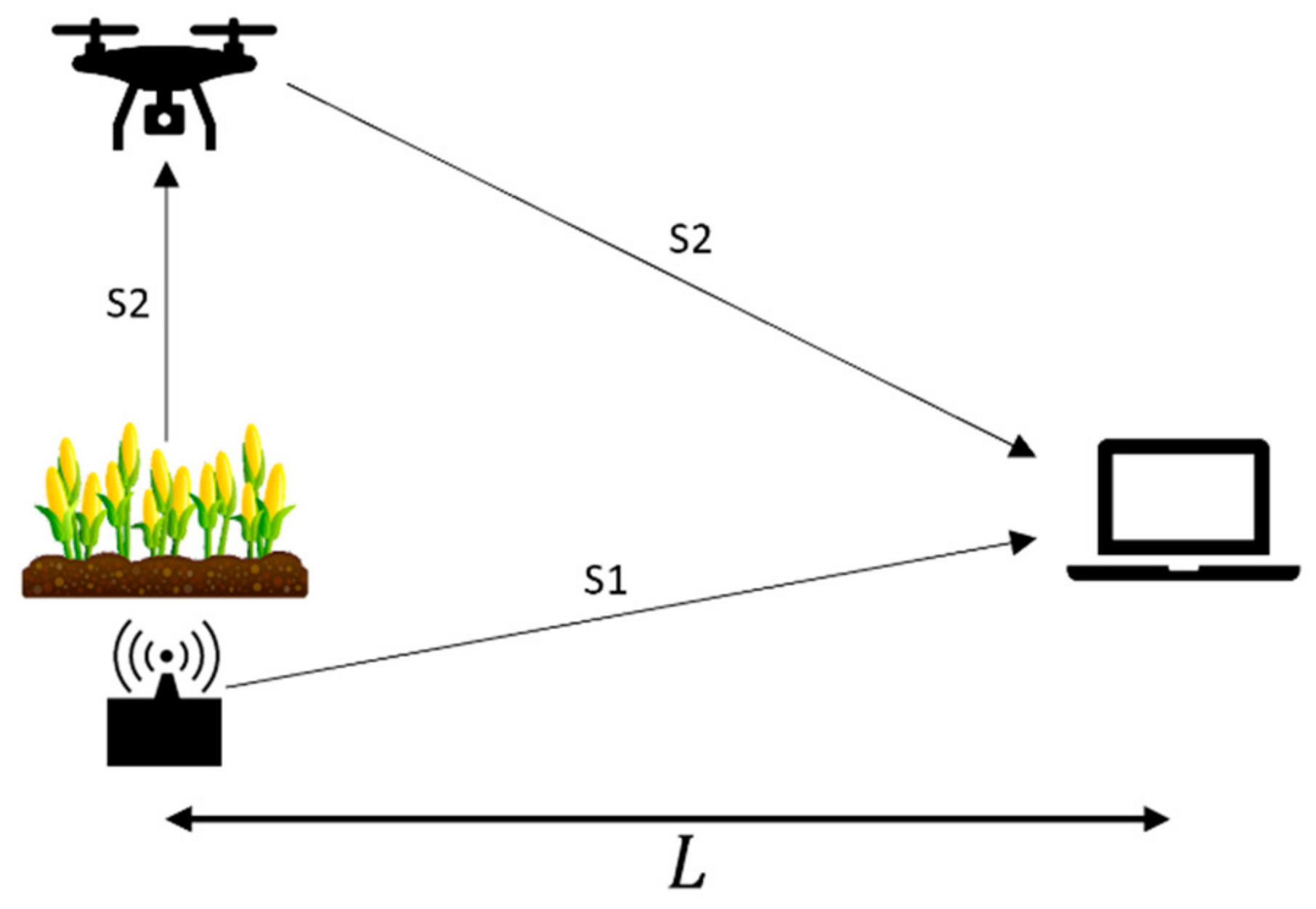
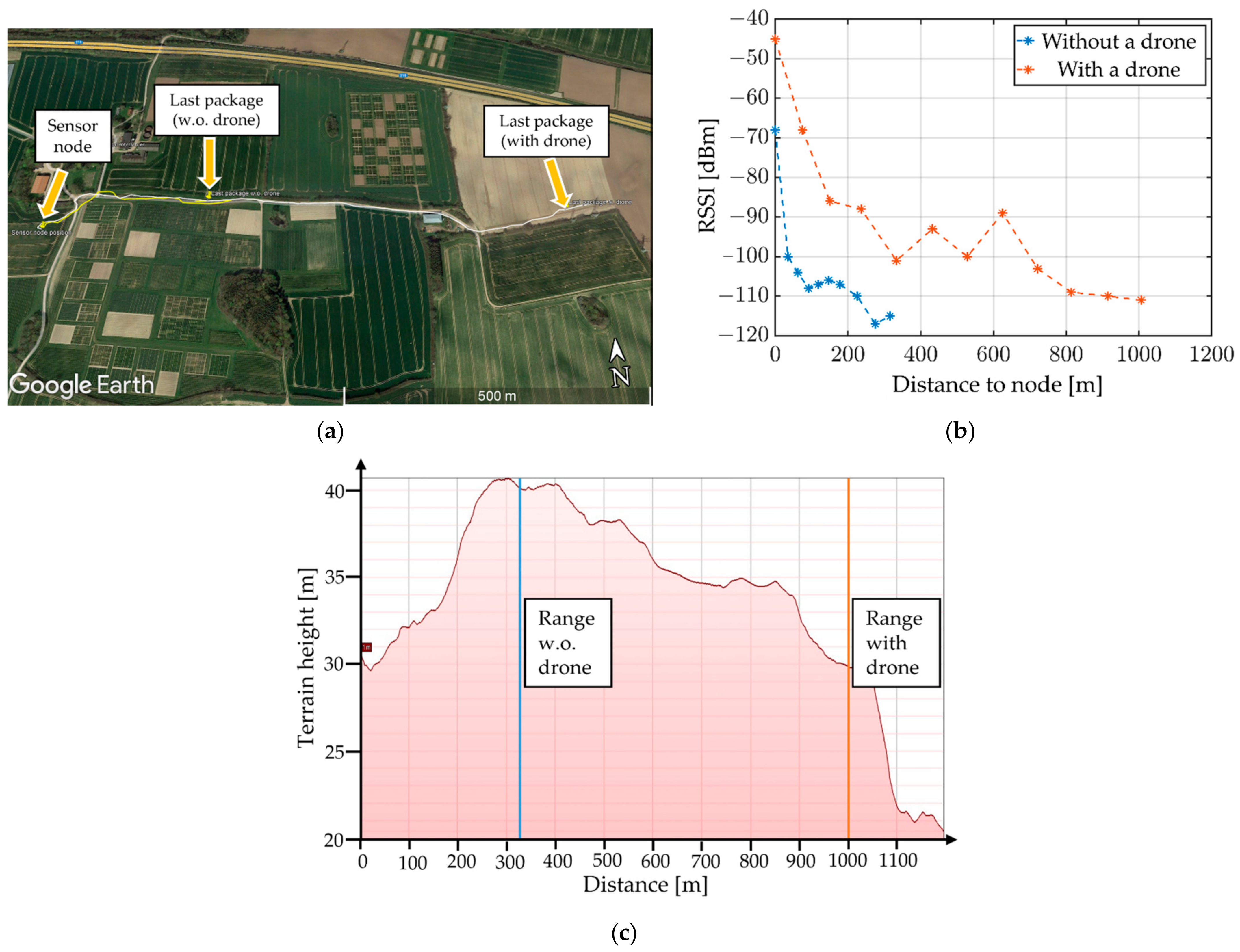
- Demonstration of the range extension capability.
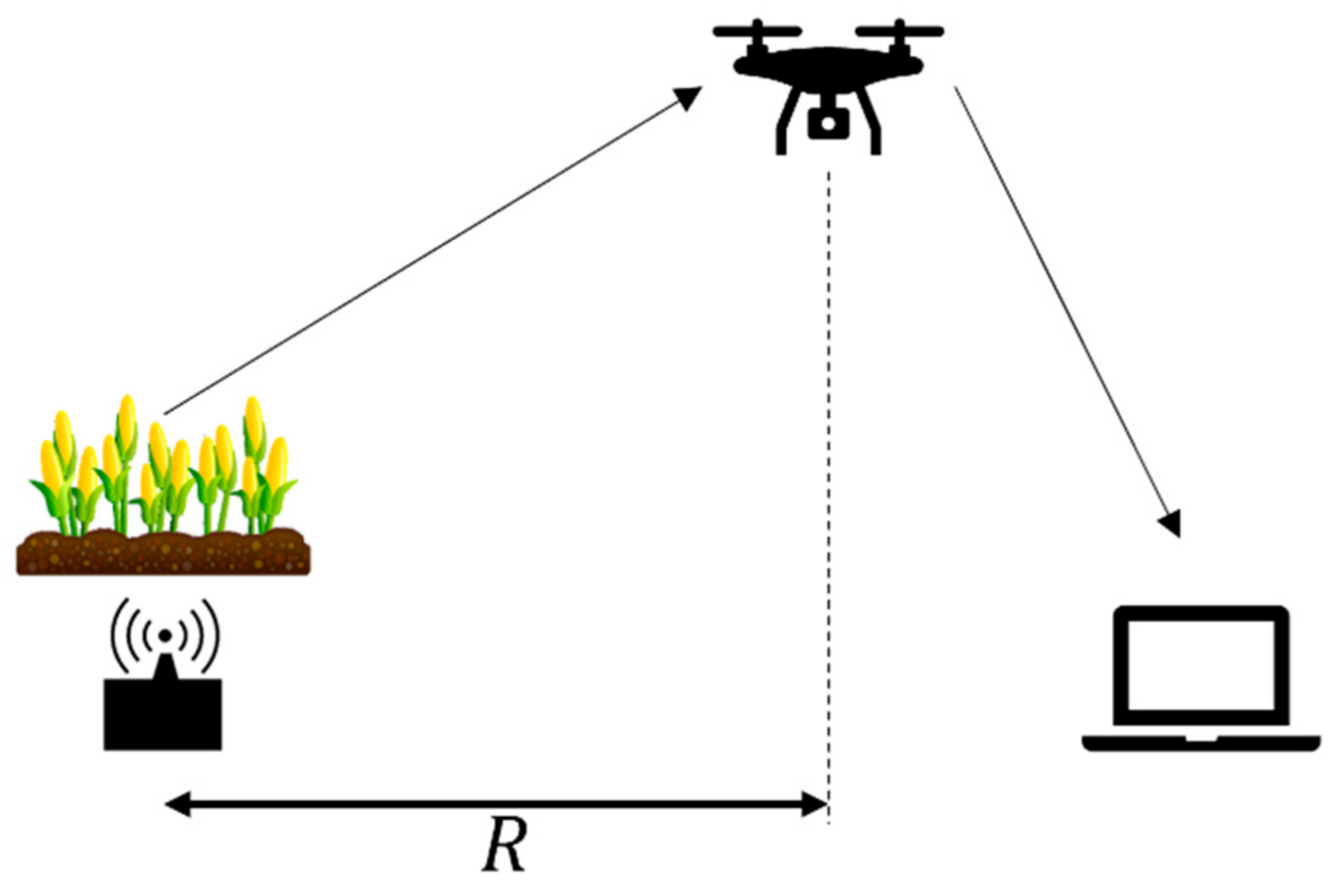
- Determination of the maximum distance between the sensor node and drone with the setup.
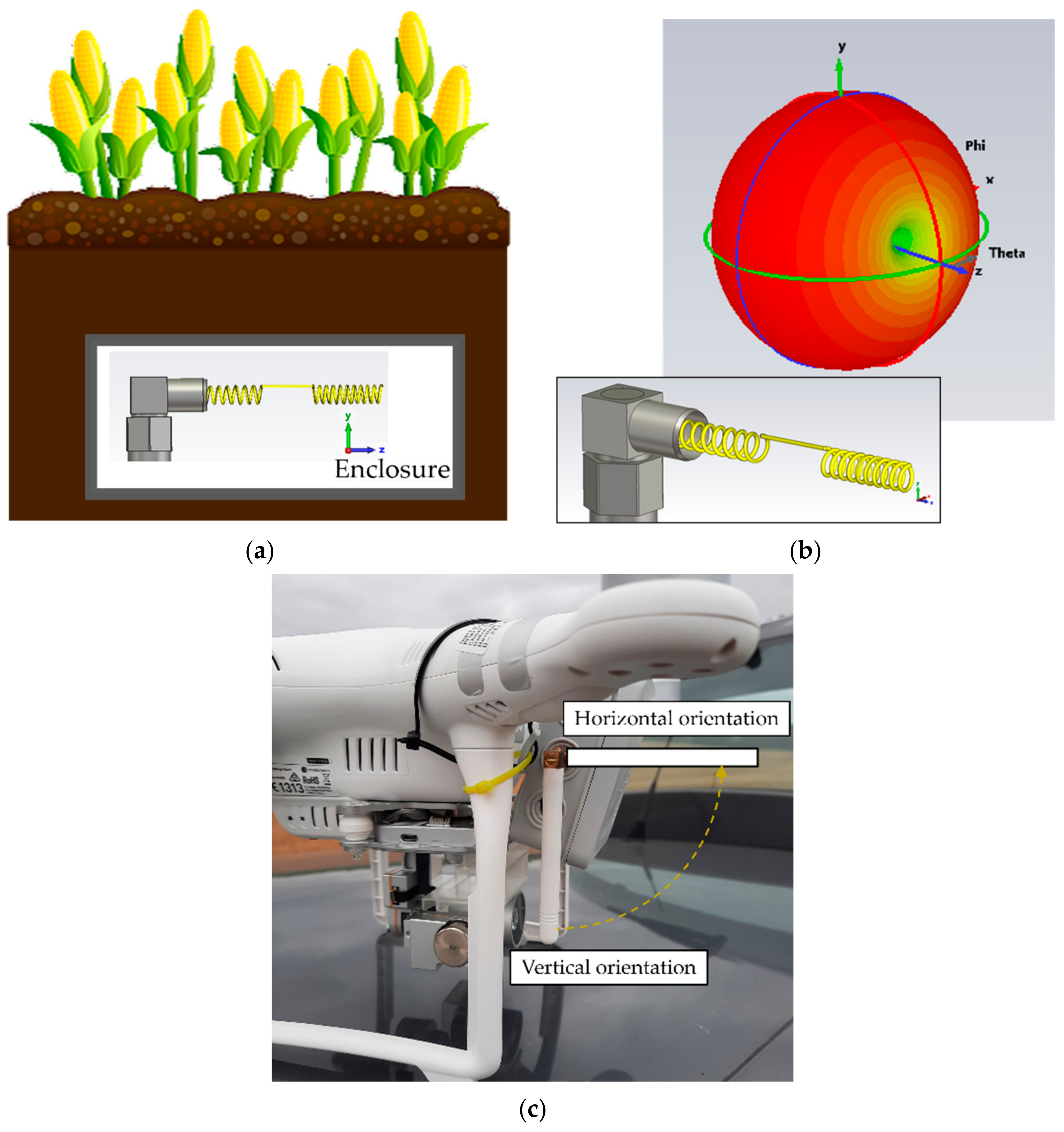
- Investigation of the effect of the antenna placement inside the sensor node on the received LoRa signal strength.
- Investigation of the repeatability of the signal strength over distance measurements.
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Investigation of Flight Height and Burial Depth Dependency
2.2.2. Demonstration of the Range Extension Capability
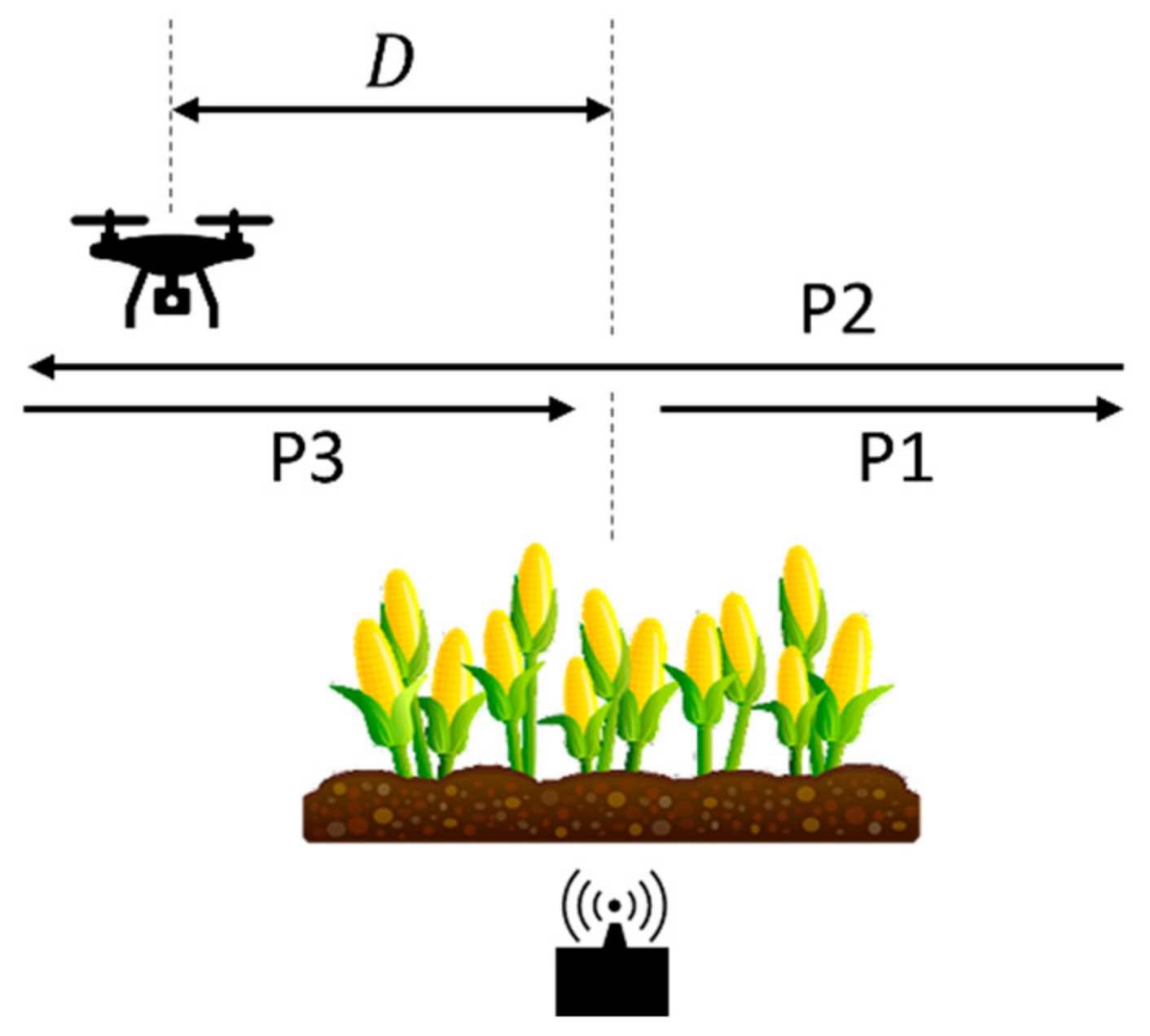
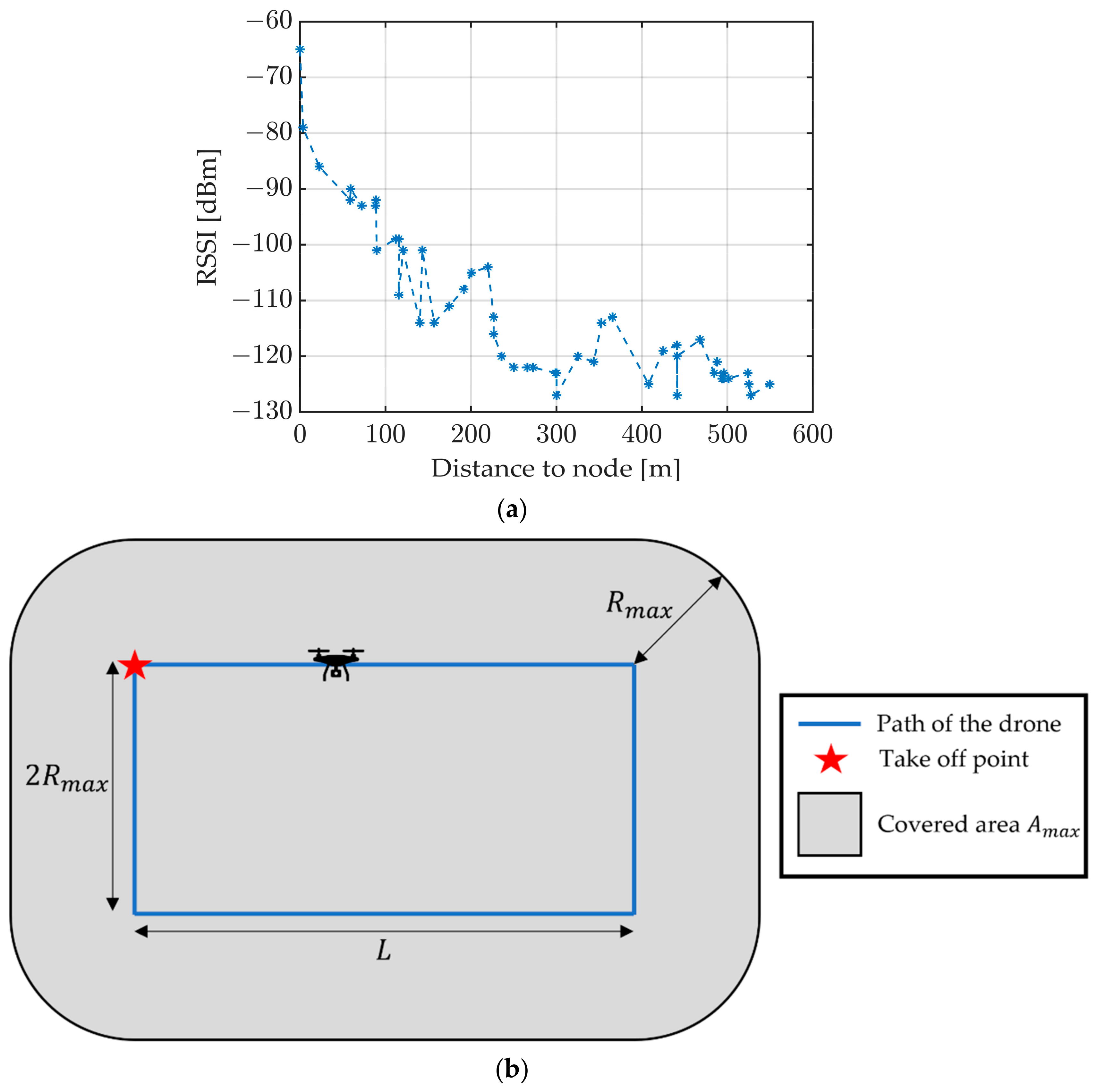
2.2.3. Investigation of the Communication Range between Sensor Node and Drone
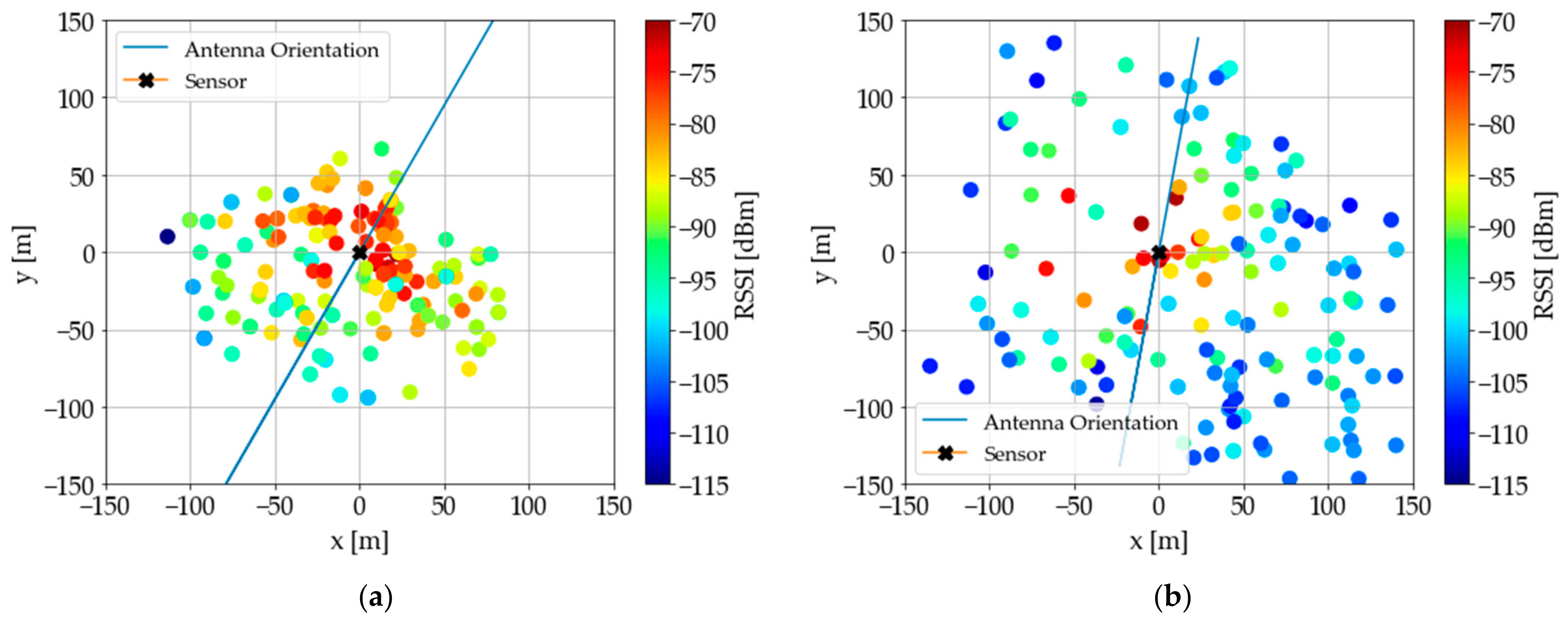
2.2.4. Investigation of the Antenna Radiation Pattern
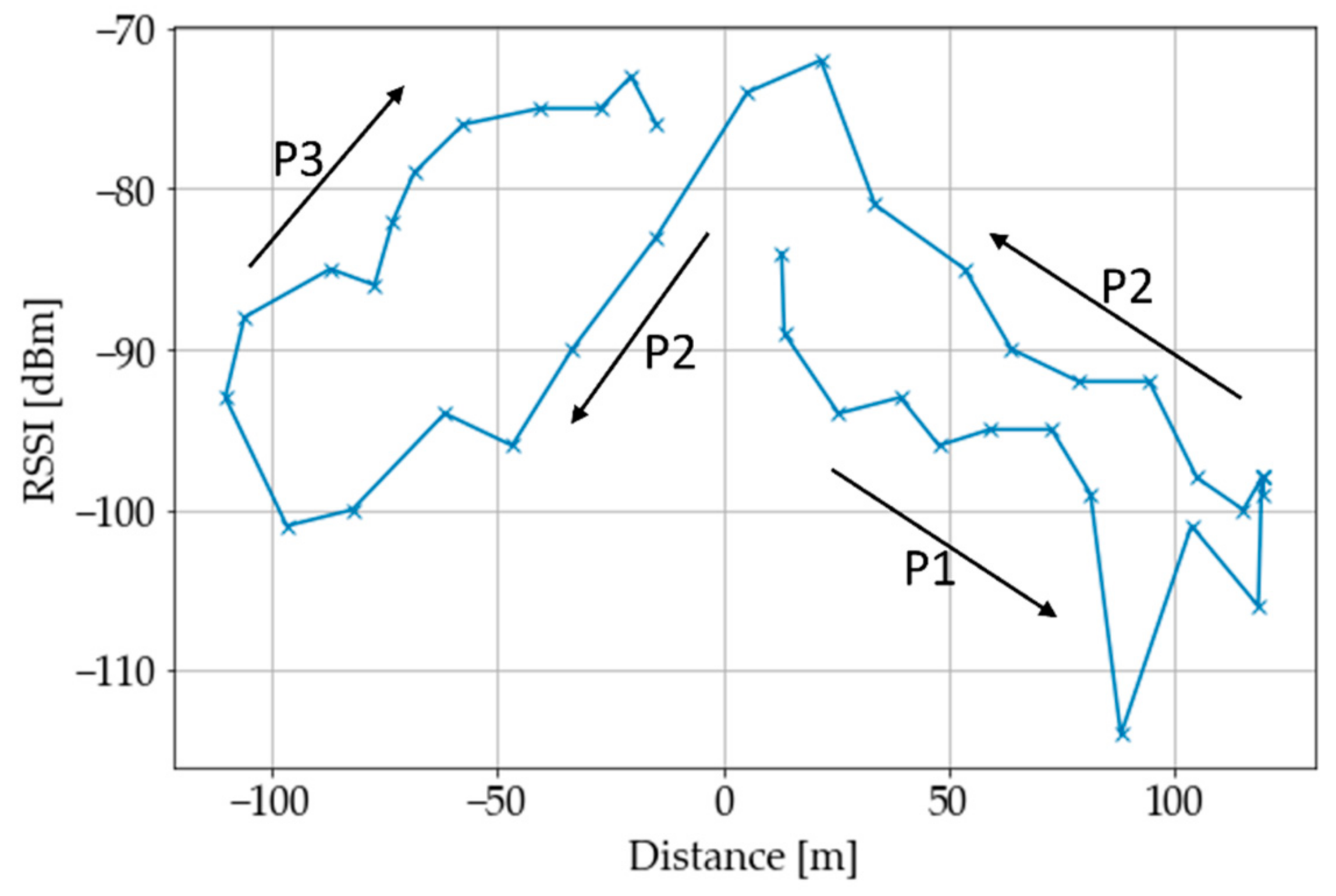
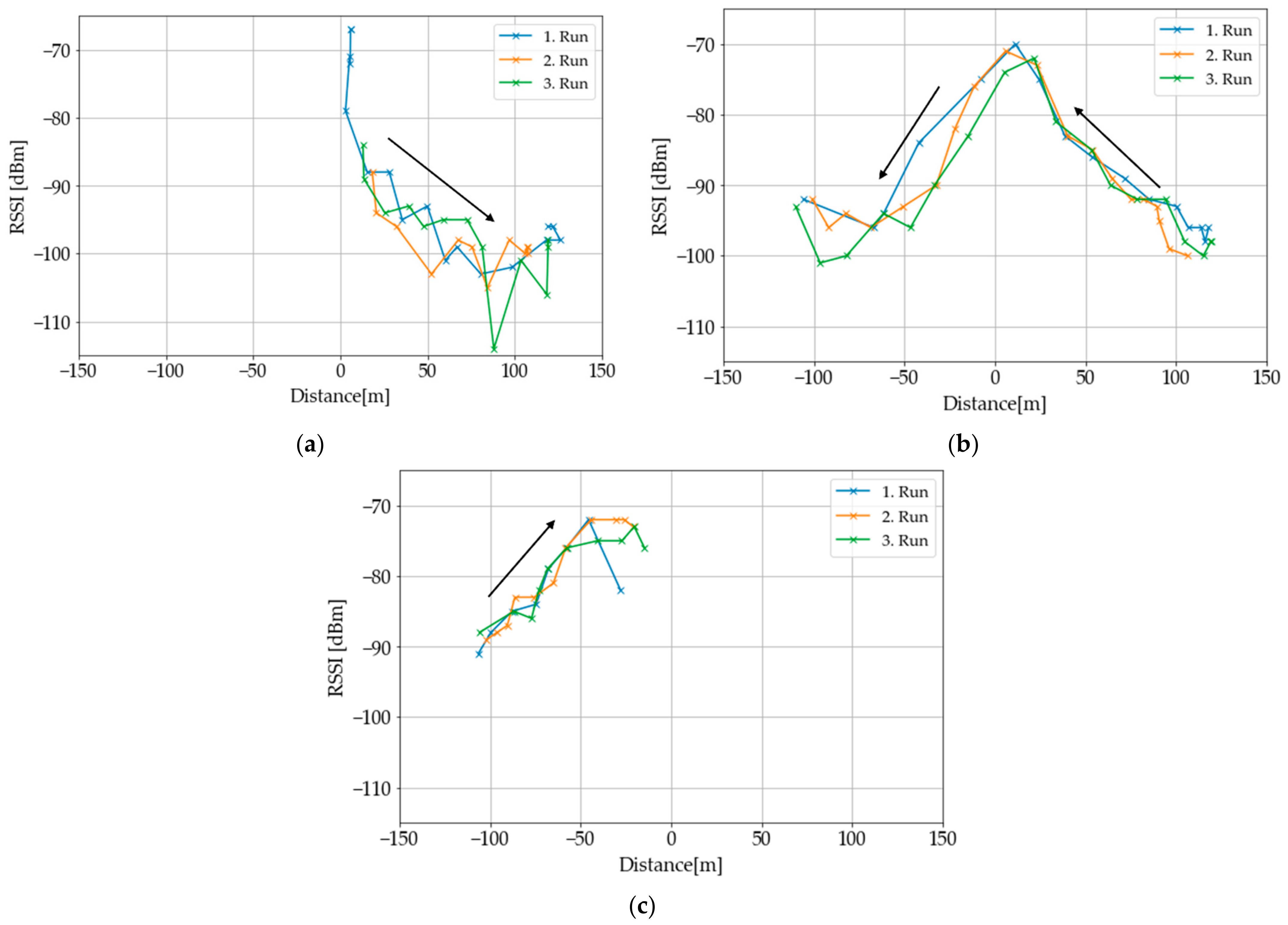
2.2.5. Investigation of Reproducibility
3. Results
3.1. Investigation of Flight Height and Burial Depth Dependency
3.2. Demonstration of the Range Extension Capability
3.3. Investigation of the Communication Range between Sensor Node and Drone
3.4. Investigation of the Antenna Radiation Pattern
3.5. Investigation of Reproducibility
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Robert, P.C. Precision agriculture: A challenge for crop nutrition management. Plant Soil 2002, 247, 143–149. [Google Scholar] [CrossRef]
- Shiva, V. The Violence of the Green Revolution: Third World Agriculture, Ecology and Politics; Zed Books: London, UK, 1991; ISBN 9780862329655. [Google Scholar]
- Hillel, D.; Braimoh, A.K.; Vlek, P.L.G. Soil Degradation Under Irrigation; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar]
- Bardhan, K.; York, L.M.; Hasanuzzaman, M.; Parekh, V.; Jena, S.; Pandya, M.N. Can smart nutrient applications optimize the plant’s hidden half to improve drought resistance? Physiol. Plant. 2021, 172, 1007–1015. [Google Scholar] [CrossRef]
- Forde, B.; Lorenzo, H. The nutritional control of root development. Plant Soil 2002, 232, 51–68. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Vuran, M.C.; Salam, A.; Wong, R.; Irmak, S. Internet of underground things: Sensing and communications on the field for precision agriculture. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018. [Google Scholar] [CrossRef]
- Grunwald, A.; Schaarschmidt, M.; Westerkamp, C. LoRaWAN in a rural context: Use cases and opportunities for agricultural businesses. In Proceedings of the Mobile Communication-Technologies and Applications; 24. ITG-Symposium, Osnabrueck, Germany, 15–16 May 2019; pp. 1–6. [Google Scholar]
- Salam, A.; Vuran, M.C.; Irmak, S. Di-Sense: In situ real-time permittivity estimation and soil moisture sensing using wireless underground communications. Comput. Netw. 2019, 151, 31–41. [Google Scholar] [CrossRef]
- Wohwe Sambo, D.; Forster, A.; Yenke, B.O.; Sarr, I.; Gueye, B.; Dayang, P. Wireless Underground Sensor Networks Path Loss Model for Precision Agriculture (WUSN-PLM). IEEE Sens. J. 2020, 20, 5298–5313. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Barnetson, J.; Phinn, S.; Scarth, P. Estimating Plant Pasture Biomass and Quality from UAV Imaging across Queensland’s Rangelands. AgriEngineering 2020, 2, 523–543. [Google Scholar] [CrossRef]
- Bukowiecki, J.; Rose, T.; Kage, H. Sentinel-2 Data for Precision Agriculture?-A UAV-Based Assessment. Sensors 2021, 21, 2861. [Google Scholar] [CrossRef]
- Fan, D.; Su, X.; Weng, B.; Wang, T.; Yang, F. Research Progress on Remote Sensing Classification Methods for Farmland Vegetation. AgriEngineering 2021, 3, 971–989. [Google Scholar] [CrossRef]
- Quino, J.; Maja, J.M.; Robbins, J.; Fernandez, R.T.; Owen, J.S.; Chappell, M. RFID and Drones: The Next Generation of Plant Inventory. AgriEngineering 2021, 3, 168–181. [Google Scholar] [CrossRef]
- Marturano, F.; Martellucci, L.; Chierici, A.; Malizia, A.; Di Giovanni, D.; d’Errico, F.; Gaudio, P.; Ciparisse, J.-F. Numerical Fluid Dynamics Simulation for Drones’ Chemical Detection. Drones 2021, 5, 69. [Google Scholar] [CrossRef]
- Behjati, M.; Mohd Noh, A.B.; Alobaidy, H.A.H.; Zulkifley, M.A.; Nordin, R.; Abdullah, N.F. LoRa Communications as an Enabler for Internet of Drones towards Large-Scale Livestock Monitoring in Rural Farms. Sensors 2021, 21, 5044. [Google Scholar] [CrossRef]
- Park, S.; Yun, S.; Kim, H.; Kwon, R.; Ganser, J.; Anthony, S. Forestry Monitoring System Using LoRa and Drone. In Proceedings of the 8th International Conference on Web Intelligence, Mining and Semantics, Novi Sad, Serbia, 25–27 June 2018. [Google Scholar] [CrossRef]
- Caruso, A.; Chessa, S.; Escolar, S.; Barba, J.; Lopez, J.C. Collection of Data With Drones in Precision Agriculture: Analytical Model and LoRa Case Study. IEEE Internet Things J. 2021, 8, 16692–16704. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, C.; Sheng, L.; Cao, S. Optimization Schemes for UAV Data Collection with LoRa 2.4 GHz Technology in Remote Areas without Infrastructure. Drones 2022, 6, 173. [Google Scholar] [CrossRef]
- Pan, Q.; Wen, X.; Lu, Z.; Li, L.; Jing, W. Dynamic Speed Control of Unmanned Aerial Vehicles for Data Collection under Internet of Things. Sensors 2018, 18, 3951. [Google Scholar] [CrossRef] [PubMed]
- Zorbas, D.; O’Flynn, B. Collision-Free Sensor Data Collection using LoRaWAN and Drones. In Proceedings of the 2018 Global Information Infrastructure and Networking Symposium (GIIS), Thessaloniki, Greece, 23–25 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Castellanos, G.; Deruyck, M.; Martens, L.; Joseph, W. System Assessment of WUSN Using NB-IoT UAV-Aided Networks in Potato Crops. IEEE Access 2020, 8, 56823–56836. [Google Scholar] [CrossRef]
- Cariou, C.; Moiroux-Arvis, L.; Pinet, F.; Chanet, J.-P. Data Collection from Buried Sensor Nodes by Means of an Unmanned Aerial Vehicle. Sensors 2022, 22, 5926. [Google Scholar] [CrossRef]
- Hossain, F.F.; Messenger, R.; Captain, G.L.; Ekin, S.; Jacob, J.D.; Taghvaeian, S.; O’Hara, J.F. Soil Moisture Monitoring Through UAS-Assisted Internet of Things LoRaWAN Wireless Underground Sensors. IEEE Access 2022, 10, 102107–102118. [Google Scholar] [CrossRef]
- Titov, I.; Holtorf, L.; Daschner, F.; Gerken, M. Drone as LoRa® Repeater for Readout of Low-power Sensor Nodes in Precision Agriculture. In Proceedings of the EASS 2022; 11th GMM-Symposium, Erfurt, Germany, 5–6 July 2022; pp. 1–3. [Google Scholar]
- Heltec Automation Technology Co., Ltd. WiFi LoRa 32 (V2): LoRa Node Development Kit. Available online: https://resource.heltec.cn/download/Manual%20Old/WiFi%20Lora32Manual.pdf (accessed on 15 January 2023).
- DJI Technology Co., Ltd. Phantom 3 Advanced: User Manual V1.8. Available online: https://dl.djicdn.com/downloads/phantom_3/en/Phantom_3_Advanced_User_Manual_en_v1.8_160719.pdf (accessed on 15 January 2023).
- Almalki, F.A.; Soufiene, B.O.; Alsamhi, S.H.; Sakli, H. A Low-Cost Platform for Environmental Smart Farming Monitoring System Based on IoT and UAVs. Sustainability 2021, 13, 5908. [Google Scholar] [CrossRef]
- Böckmann, S.; Titov, I.; Gerken, M. Extraction of Soil Solution into a Microfluidic Chip. AgriEngineering 2021, 3, 783–796. [Google Scholar] [CrossRef]
- Titov, I.; Köpke, M.; Gerken, M. Monolithic Integrated OLED–OPD Unit for Point-of-Need Nitrate Sensing. In Optical Sensors and Sensing Congress 2022 (AIS, LACSEA, Sensors, ES), Proceedings of the Optical Sensors and Sensing Congress 2022 (AIS, LACSEA, Sensors, ES), Vancouver, BC, Canada, 11 July 2022; Optica Publishing Group, Ed.; Optica Publishing Group: Washington, DC, USA, 2022. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holtorf, L.; Titov, I.; Daschner, F.; Gerken, M. UAV-Based Wireless Data Collection from Underground Sensor Nodes for Precision Agriculture. AgriEngineering 2023, 5, 338-354. https://doi.org/10.3390/agriengineering5010022
Holtorf L, Titov I, Daschner F, Gerken M. UAV-Based Wireless Data Collection from Underground Sensor Nodes for Precision Agriculture. AgriEngineering. 2023; 5(1):338-354. https://doi.org/10.3390/agriengineering5010022
Chicago/Turabian StyleHoltorf, Lucas, Igor Titov, Frank Daschner, and Martina Gerken. 2023. "UAV-Based Wireless Data Collection from Underground Sensor Nodes for Precision Agriculture" AgriEngineering 5, no. 1: 338-354. https://doi.org/10.3390/agriengineering5010022
APA StyleHoltorf, L., Titov, I., Daschner, F., & Gerken, M. (2023). UAV-Based Wireless Data Collection from Underground Sensor Nodes for Precision Agriculture. AgriEngineering, 5(1), 338-354. https://doi.org/10.3390/agriengineering5010022