Genetic Algorithm for Determination of the Event Collision Time and Particle Identification by Time-of-Flight at NICA SPD


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
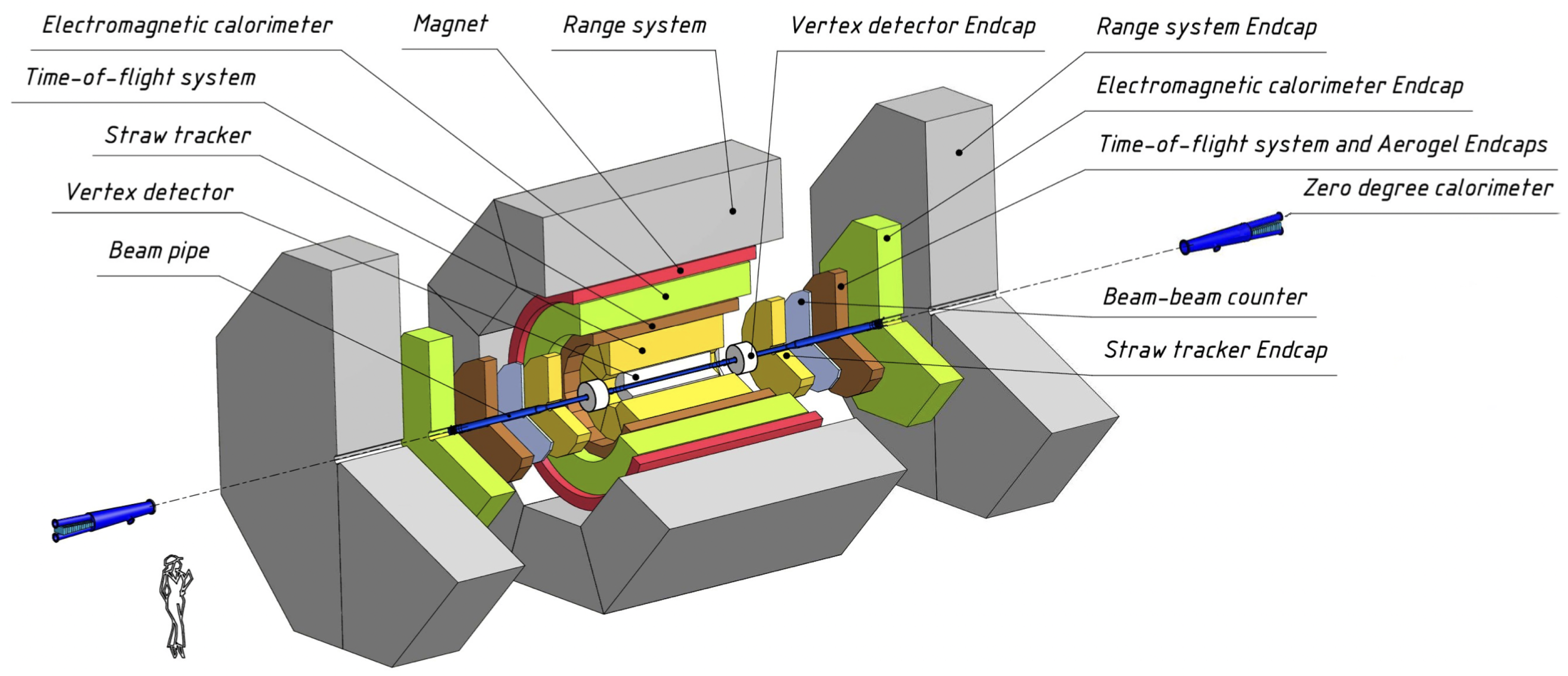
2. Time-of-Flight Detector and Event Selection
3. Event Collision Time Measurement Performed by the TOF Detector
3.1. Method to Reconstruct the Event Collision Time
3.2. Brute Force Algorithm
3.3. Genetic Algorithm
- 1.
- 2.
- Create an initial population of random candidate solutions. Each candidate solution is a (pseudo)random set of N masses associated with corresponding tracks, each species has equal probability, , to be assigned to a given track. The initialization procedure enforces that all population members are unique and for each track, there are at least two different masses within the population.At initialization, the population should be as much as possible to cover the search space. The requirement of at least two different masses per track within the population diverts the risk of a degenerated search—the search in a subspace of the search domain. Furthermore, at initialization, the expected abundance of particle species is not taken into account, but each species has an equal probability to be assigned to a given track—this approach facilitates the exploration ability of the algorithm. Example of a population in event with 6 tracks and size of population :
- 3.
- Create a new candidate solution (offspring generation):
- (a)
- Choose three distinct random solution vectors from the current population and create a mutant vector:Vector is called a parent vector. Two other vectors form a difference vector, . If any coordinate falls outside the range , it is projected back to the corresponding boundary. The mutant vector has to be different from any population member, otherwise the generation is repeated.Example:
- (b)
- (c)
- Compare and .
- (d)
- If —the new mutant vector is better than the parent, then the offspring supersedes the parent vector in the population. Otherwise, the population remains unchanged. This step is called natural (Darwinian) selection.
- 4.
- Steps 3(a)–3(d) are repeated until a terminating criterion is reached. After a predefined number of iterations, , the solution with the smallest is chosen as the best combination.
4. Results and Discussion
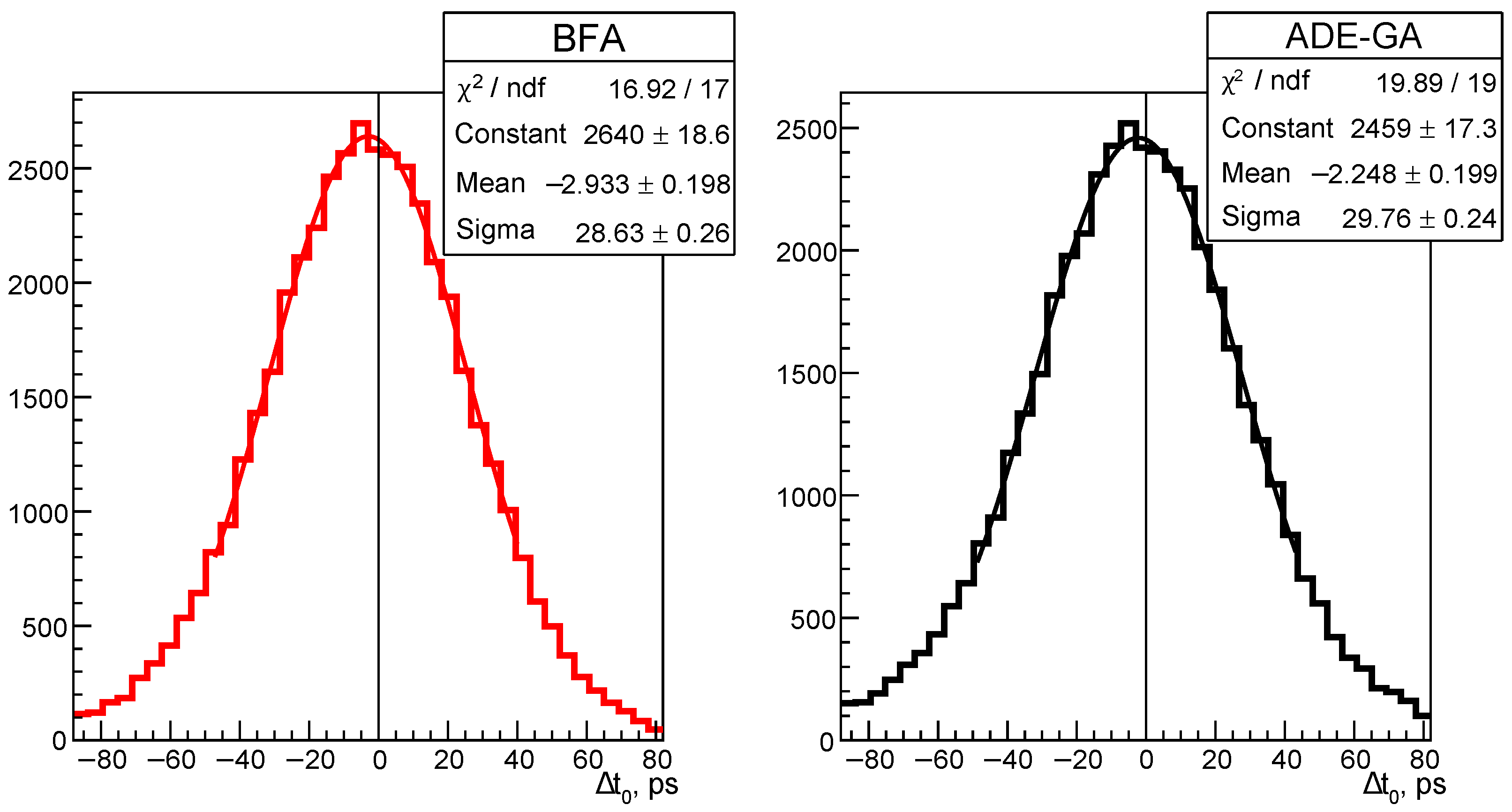
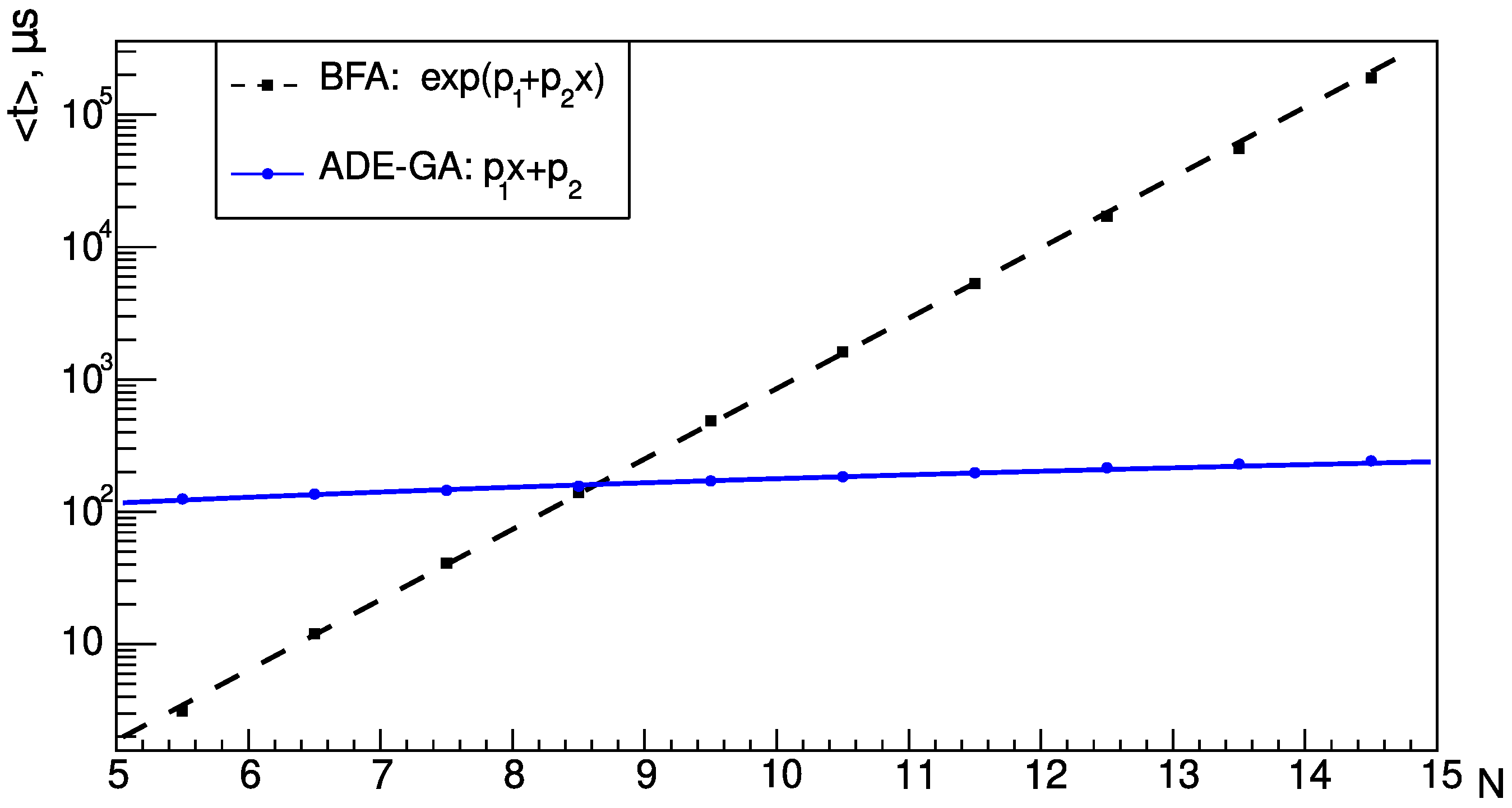
4.1. Comparison of the Genetic Algorithm with the Brute Force Algorithm
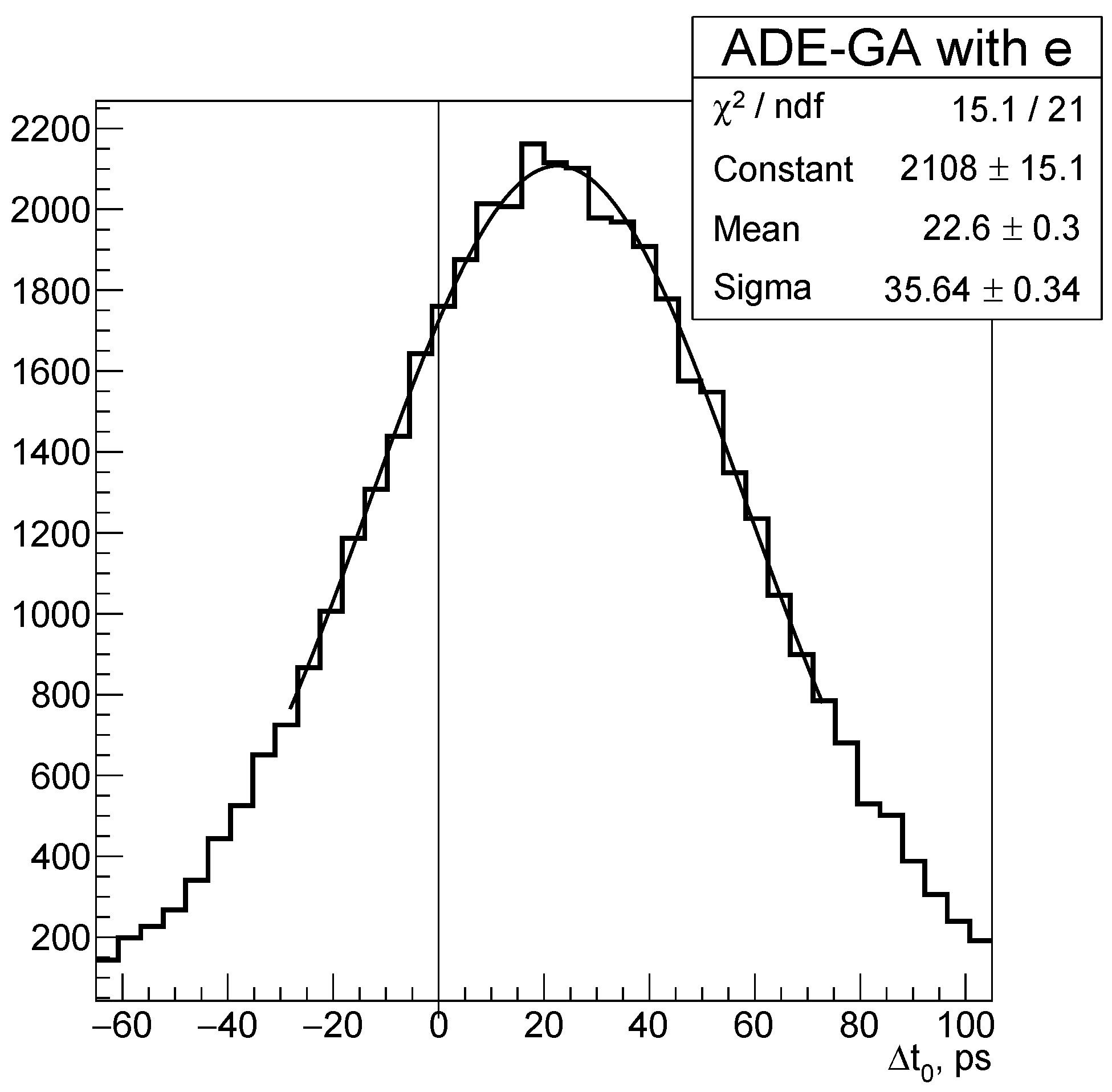
4.2. Alternative Ways to Measure the Event Collision Time
4.3. Particle Identification by Time-of-Flight
- 1.
- One can assign particle type for each track from the result of -minimization: the track type is accepted as the most likely species (maximal probability).
- 2.
- On the other hand, for every track i in event, one can exclude this track from the determination of the collision time to avoid correlations. Let us denote as the event collision time calculated over the rest of the tracks in the event. Then there are two common strategies to perform PID by time-of-flight [14]:
- (a)
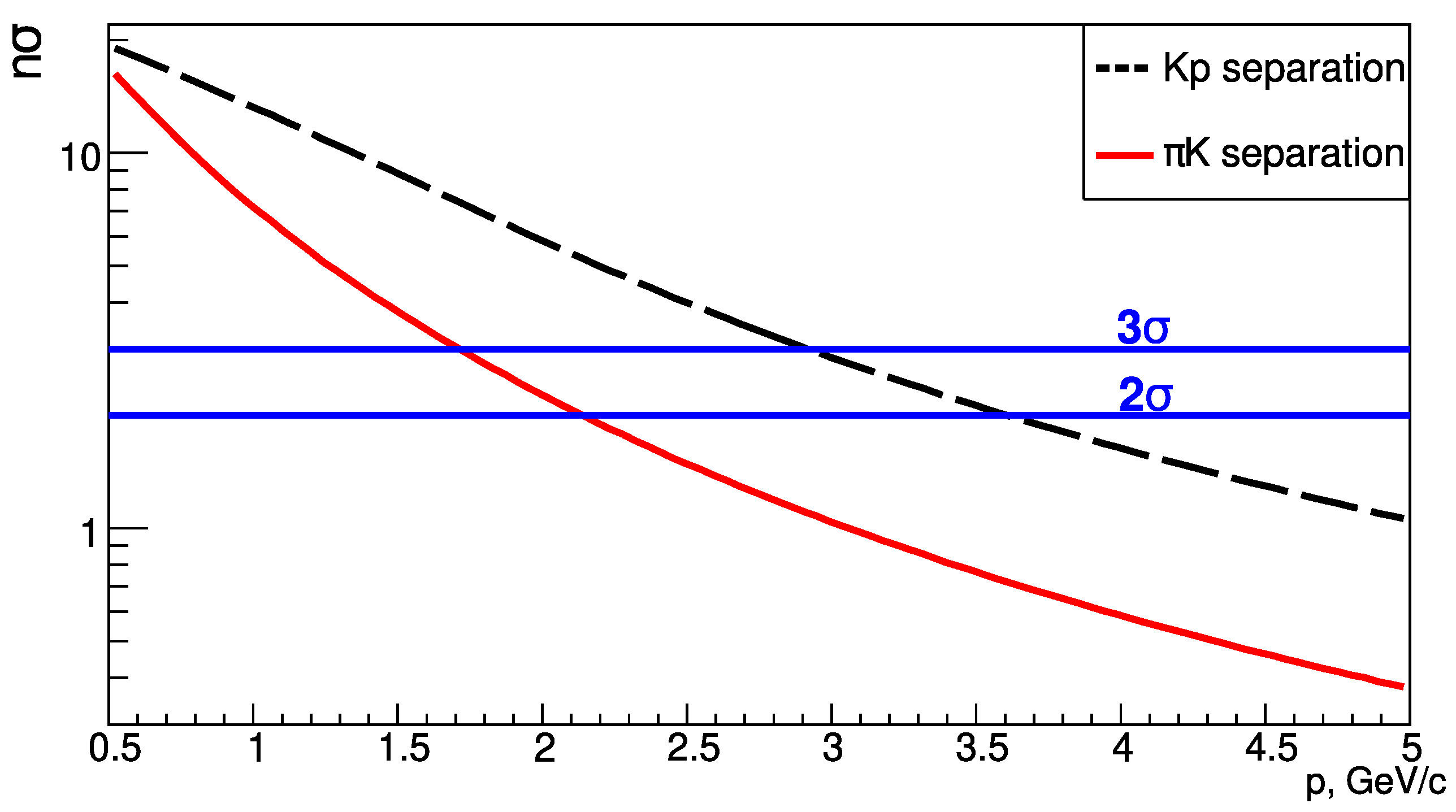
- n-sigma selection—the most simple threshold discriminator:Here is a signal obtained for track i, is the expected signal for a particle of species j with momenta . If the signal belongs to the range (standard deviation) or of a certain species, this track is accepted as the particle of this species. The track can be accepted as multiple species.
- (b)
- Bayesian method: takes into account yield of particle species. The conditional probability for track i to be a particle of species j reads:Here is a prior probability that is calculated iteratively. It takes into account the relative abundance of species j, which depends on particle momenta and emission angle. The likelihood function, , is given by
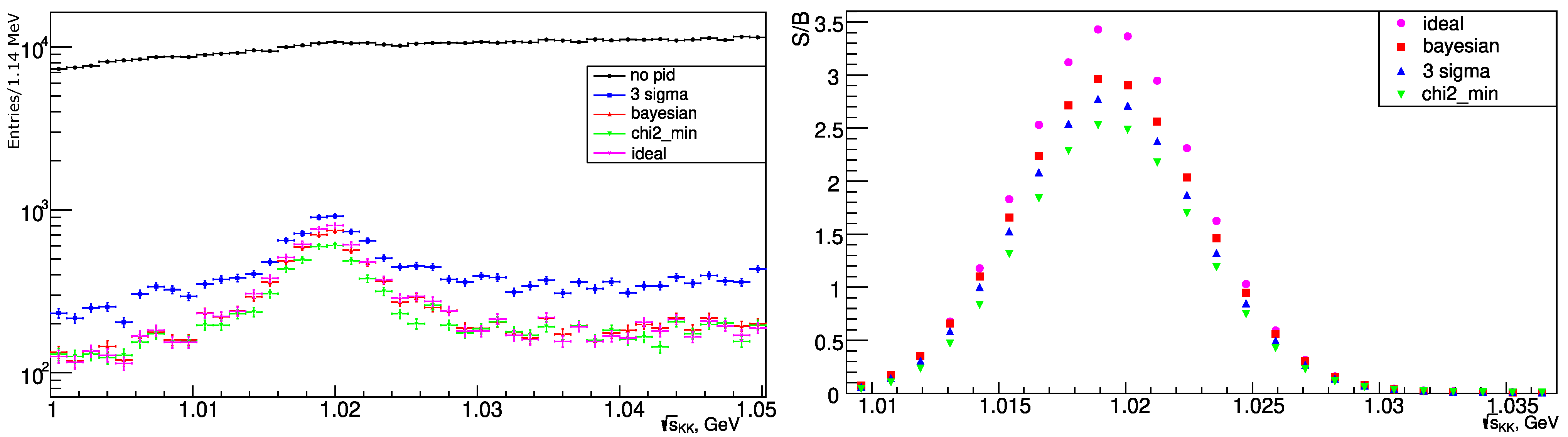
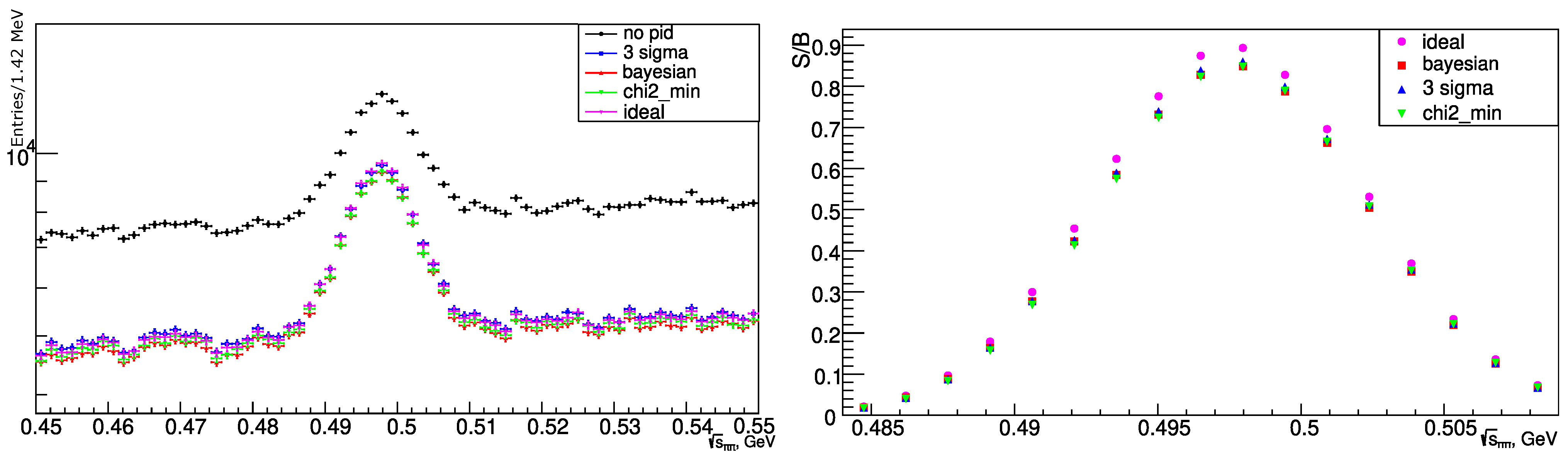
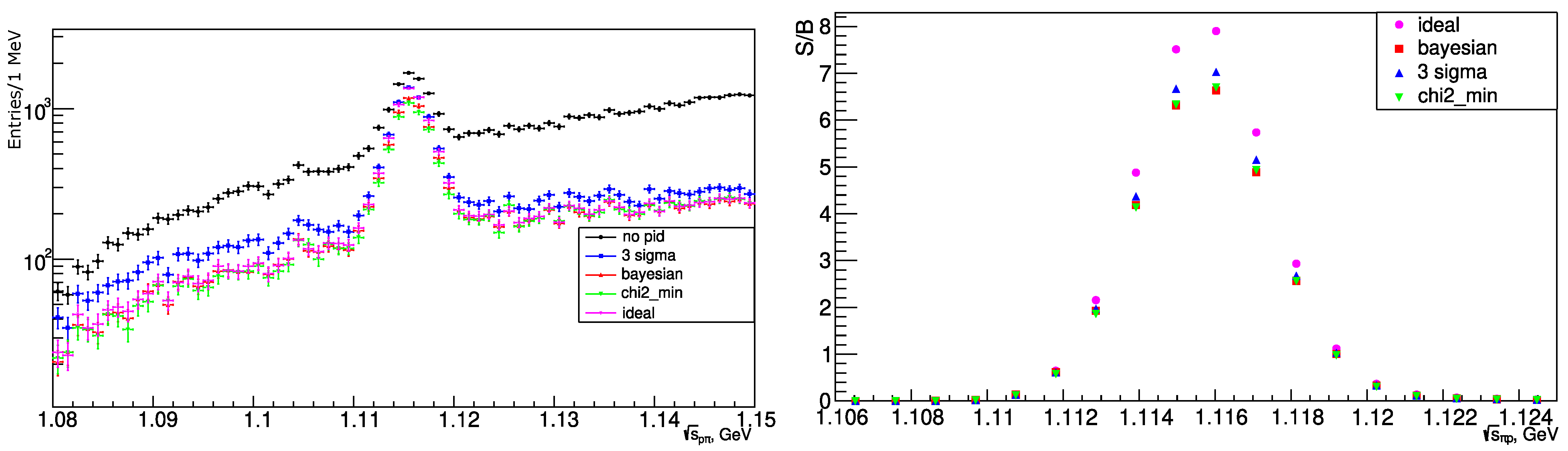
4.4. PID Benchmarks for Two-Prong Decay Channels
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADE-GA | Asynchronous Differential Evolution-inspired Genetic Algorithm |
| ALICE | A Large Ion Collider Experiment |
| ANKE-COSY | The Apparatus for studies of Nucleon and Kaon Ejectiles at the COoler SYnchrotron |
| BFA | Brute Force Algorithm |
| DE | Differential Evolution |
| GA | Genetic Algorithm |
| JINR | Joint Institute for Nuclear Research |
| LHC | Large Hadron Collider |
| MRPC | Multigap Resistive Plate Chamber |
| NICA | Nuclotron-based Ion Collider fAcility |
| PID | Particle IDentification |
| QCD | Quantum Chromodynamics |
| RHIC | Relativistic Heavy Ion Collider |
| SPD | Spin Physics Detector |
| TOF | Time-Of-Flight |
References
- Abazov, V.M. et al. [SPD Collaboration] Conceptual design of the Spin Physics Detector. arXiv 2021, arXiv:2102.00442. [Google Scholar] [CrossRef]
- Dymov, S. [ANKE Collaboration]. Recent results from the NN-interaction studies with polarized beams and targets at ANKE-COSY. J. Phys. Conf. Ser. 2016, 678, 012014. [Google Scholar] [CrossRef]
- Maggiora, M. New results from DISTO for spin observables in exclusive hyperon production. Nucl. Phys. A 2001, 691, 329c–335c. [Google Scholar] [CrossRef]
- Abdallah, M.S. et al. [STAR Collaboration] Longitudinal double-spin asymmetry for inclusive jet and dijet production in polarized proton collisions at = 200 GeV. Phys. Rev. D 2021, 103, L091103. [Google Scholar] [CrossRef]
- Hadjidakis, C.; Kikoła, D.; Lansberg, J.P.; Massacrier, L.; Echevarria, M.G.; Kusina, A.; Schienbein, I.; Seixas, J.; Shao, H.S.; Signori, A.; et al. A fixed-target programme at the LHC: Physics case and projected performances for heavy-ion, hadron, spin and astroparticle studies. Phys. Rep. 2021, 911, 1–83. [Google Scholar] [CrossRef]
- Cerron Zeballos, E.; Crotty, I.; Hatzifotiadou, D.; Lamas Valverde, J.; Neupane, S.; Williams, M.C.S.; Zichichi, A. A new type of resistive plate chamber: The multigap RPC. Nucl. Instrum. Meth. A 1996, 374, 132–135. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, Y. Multigap resistive plate chambers for time of flight applications. Appl. Sci. 2021, 11, 111. [Google Scholar] [CrossRef]
- Basile, M.; Cara Romeo, G.; Cifarelli, L.; D’Ali, G.; Di Cesare, P.; Giusti, P.; Massam, T.; Palmonari, F.; Sartorelli, G.; Valenti, G.; et al. A large-area time-of-flight system for a colliding beam machine. Nucl. Instrum. Meth. A 1981, 179, 477–485. [Google Scholar] [CrossRef]
- Akindinov, A.; Alici, A.; Agostinelli, A.; Antonioli, P.; Arcelli, S.; Basile, M.; Bellini, F.; Cara Romeo, G.; Cifarelli, L.; Cindolo, F.; et al. Performance of the ALICE Time-Of-Flight detector at the LHC. Eur. Phys. J. Plus 2013, 128, 44. [Google Scholar] [CrossRef]
- Adam, J. et al. [ALICE Collaboration] Determination of the event collision time with the ALICE detector at the LHC. Eur. Phys. J. Plus 2017, 132, 99. [Google Scholar] [CrossRef]
- Shao, M.; Barannikova, O.; Dong, X.; Fisyak, Y.; Ruan, L.; Sorensen, P.; Xu, Z. Extensive particle identification with TPC and TOF at the STAR experiment. Nucl. Instrum. Meth. A 2006, 558, 419–429. [Google Scholar] [CrossRef]
- Zimmermann, S.; Suzuki, K.; Steinschaden, D.; Kratochwil, N.; Nalti, W.; Orth, H.; Schwarz, C.; Lehmann, A.; Böhm, M.; Brinkmann, K.-T. The P¯ANDA Barrel Time-of-Flight detector. Nucl. Instrum. Meth. A 2020, 952, 161635. [Google Scholar] [CrossRef]
- Zhabitskaya, E.; Zhabitsky, M. Asynchronous differential evolution with adaptive correlation matrix. In GECCO’13: Proceedings of the 15th Genetic and Evolutionary Computation Conference, Amsterdam, The Netherlands, 6–10 July 2013; Blum, C., Ed.; Association for Computing Machinery: New York, NY, USA; pp. 455–462. [CrossRef]
- Adam, J. et al. [ALICE Collaboration] Particle identification in ALICE: A Bayesian approach. Eur. Phys. J. Plus 2016, 131, 168. [Google Scholar] [CrossRef]
- Bierlich, C.; Chakraborty, S.; Desai, N.; Gellersen, L.; Helenius, I.; Ilten, P.; Lönnblad, L.; Mrenna, S.; Prestel, S.; Preuss, C.T.; et al. A comprehensive guide to the physics and usage of PYTHIA 8.3. arXiv 2022, arXiv:2203.11601. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optimiz. 1995, 11, 341–359. [Google Scholar] [CrossRef]
- Zhabitskaya, E.; Zhabitsky, M. Asynchronous Differential Evolution with restart. In Numerical Analysis and Its Applications; Dimov, I., Faragó, I., Vulkov, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 555–561. [Google Scholar] [CrossRef]
- Das, S.; Mullick, S.S.; Suganthan, P.N. Recent advances in differential evolution—An updated survey. Swarm Evolut. Comput. 2016, 27, 1–30. [Google Scholar] [CrossRef]
- Filonchik, P.G.; Zhabitsky, M.V. Fast way to determine pp-collision time at the SPD experiment. arXiv 2022, arXiv:2212.07887. [Google Scholar] [CrossRef]
- Bondila, M.; Grigorev, V.A.; Guber, F.F.; Kaplin, V.A.; Karakash, A.I.; Karavichev, O.V.; Karavicheva, T.L.; Klimov, A.I.; Kondratieva, N.; Kozlov, K.N.; et al. ALICE T0 detector. IEEE Trans. Nucl. Sci. 2005, 52, 1705–1711. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yurchenko, S.; Zhabitsky, M. Genetic Algorithm for Determination of the Event Collision Time and Particle Identification by Time-of-Flight at NICA SPD. Physics 2023, 5, 423-435. https://doi.org/10.3390/physics5020030
Yurchenko S, Zhabitsky M. Genetic Algorithm for Determination of the Event Collision Time and Particle Identification by Time-of-Flight at NICA SPD. Physics. 2023; 5(2):423-435. https://doi.org/10.3390/physics5020030
Chicago/Turabian StyleYurchenko, Semyon, and Mikhail Zhabitsky. 2023. "Genetic Algorithm for Determination of the Event Collision Time and Particle Identification by Time-of-Flight at NICA SPD" Physics 5, no. 2: 423-435. https://doi.org/10.3390/physics5020030
APA StyleYurchenko, S., & Zhabitsky, M. (2023). Genetic Algorithm for Determination of the Event Collision Time and Particle Identification by Time-of-Flight at NICA SPD. Physics, 5(2), 423-435. https://doi.org/10.3390/physics5020030