1.1. Context
Road safety is a key issue for all countries in terms of social and financial cost. Road markings are not expensive, easy to install and offer added value to users. In particular, they increase both visibility and the legibility of the road. Road markings are composed of a main layer usually made of paint or thermo or cold plastic tape. To allow the road markings to be visible at night on unlit roads, the main layer is usually covered with glass beads, which reflect the light from the car’s headlights onto the marking and then towards the driver. The characterization of road markings (visibility, colour, etc.) is currently defined according to the perception of human drivers. With the technological developments of automated vehicle (AV) sensors, are these characteristics still valid?
In order to deal with this issue, the French project SAM (Safety and Acceptability of Automated Mobility) is in progress. This project consists of developing knowledge to build a technical and regulatory framework to facilitate the circulation of automated vehicles on the French road network. One of the tasks of this project is to evaluate the detection of road markings by camera-based driving assistance systems through varying different parameters—both on the state of wear of the markings and also on the state of the road.
This paper presents a detailed analysis of the performance of markings, performed in conjunction with automated driver-assistance systems (ADAS) sensors on an experiment conducted during the day on a dry circulated road.
1.2. Road-Marking Visibility According to Standards
To be efficient, road markings must be visible by day and night and in various sunlight and weather conditions. The performance of road markings is controlled with some requirements given by the standards EN1436 [
1] and ASTM2005 [
2]. In particular, the visibility of the road markings is defined for human perception: it is based on the photopic visual sensibility curve.
By day, the visibility of road markings is mostly characterized by the luminance coefficient under diffused daylight (expressed in mcd·m·lx ). This corresponds to the ratio of the luminance of the diffused natural light reflected from the road marking at an angle of 2.29 over the horizontal illuminance due to the overcast sky. This geometry represents a driver whose eyes are conventionally 1.2 m from the ground and who is looking 30 m away.
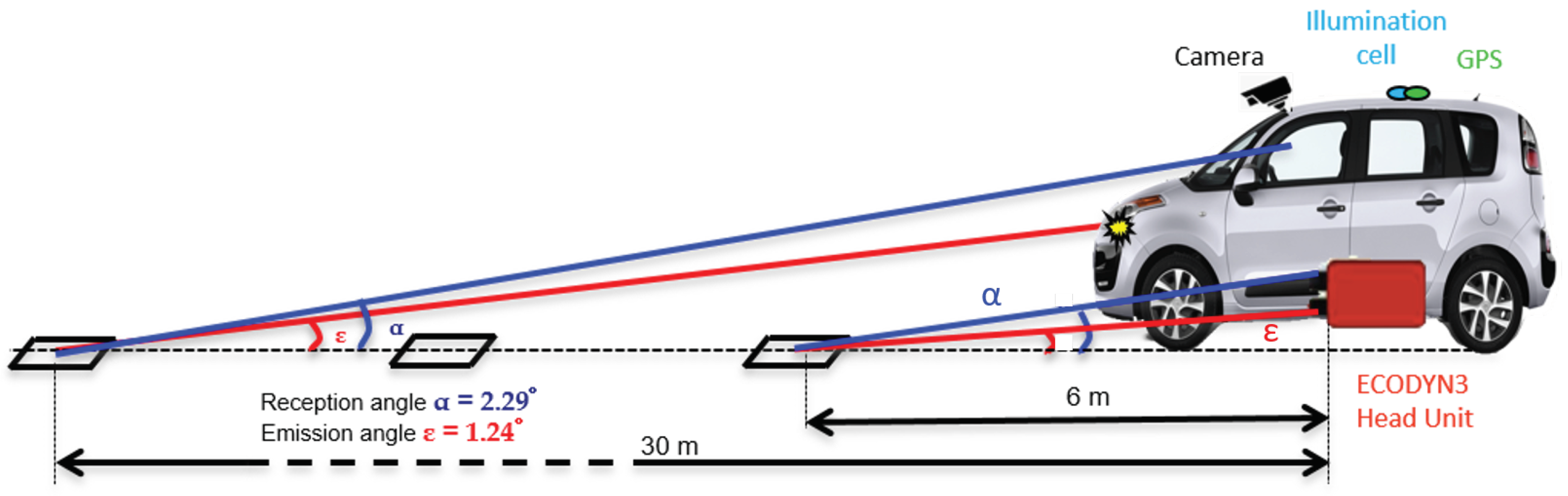
At night, the visibility of the road markings is no longer ensured by natural light but by the reflection of the car headlights on the surface of the marking. Night visibility is characterized by the retroreflection coefficient
, which is defined as the reflection of the headlights on a marking located 30 m from the driver. It is the quotient of the luminance
L of the field of the road marking in the direction of observation by the illuminance
at the field perpendicular to the direction of the incident light [
1]. In standard measuring conditions, the observation angle is 2.29
, and the illumination angle is 1.24
.
In the standards, all these marking visibility indicators are expressed independently of the surrounding pavement characteristics.
Although it concerns only night-time visibility, the most widely used indicator of road-marking performance is the retroreflection
. Several studies [
3,
4,
5] have shown that the number of accidents at night decreases when the
is higher. Moreover, since the 1990s, the literature introduced maintenance models mostly based on retroreflectivity as a variable but also considering the age of the marking, initial
, traffic volume, material type, position of the marking etc. [
6,
7].
A strategy of preventive renewal with respect to age and considering budgetary constraints has been proposed by Redondin et al. [
8] and Najeh et al. [
9], using the Weibull model based on retroreflection measurements. Moreover, in the Eurorap 2011 report [
10], a renewal of the markings was recommended when the retroreflection is lower than 150 mcd·m
·lx
. A review on the impact of road markings on driver behaviour and road safety was recently performed by Babic [
11] and also confirmed the importance of higher retroreflection and marking maintenance for road safety.
The daytime visibility indicators (e.g.,
) could also be used to define maintenance policy [
12] but are not used in practice because, contrary to the
factor, this cannot be measured dynamically.
Although not standardised and dependent on ambient light conditions, the luminance is sometimes measured dynamically with a viewing angle of 2.29
. This indicator is notably used to calculate a luminance contrast between the road marking and the pavement as seen in [
13,
14].
1.3. Road-Marking Visibility According to Machine-Vision Systems
Driving assistance technologies or ADAS are becoming common in new vehicles with the increasing automatization of driving and the future arrival of AVs. These vehicles are equipped with machine-vision (MV) systems composed of artificial-vision systems, which act as a type of “automated eye” associated with algorithms and software. To understand the needs of these systems, research must be conducted to find a relationship between the standardized factors (particularly and ) and the MV’s algorithm response. In this paper, road-marking recognition by cameras is considered.
The recognition of road markings from images recorded by on-board cameras can use different procedures of image processing: classical segmentation techniques, machine or deep learning and the use of proprietary algorithms.
Bar et al. [
15] proposed a state-of-the-art use of classic image processing for the detection of road marking. The road markings are first extracted from the pavement surface by applying a binarisation method based on a threshold on a grey-scale image, such as the Otsu [
16] method. Then, a road marking line is fitted from the different segmented objects [
17]. Hough’s transform is also often used [
18]. The major drawback of these approaches is that a relevant threshold value is needed to correctly segment the marking elements.
Since the reference paper of Bar et al. [
15], many alternatives for road-marking detection based on convolutional neural networks (CNN) have been developed. The training phase of the CNN requires a huge number of images. To constitute a reliable ground truth, an operator carefully indicates where the road marking elements are located. The image annotation phase is greatly time consuming. Once the training phase is operational, the algorithm is able to automatically detect the road markings and then to model the marking line [
19,
20]. To our knowledge, there is no paper that presents a correlation between the algorithms’ answers and the standardized indicators characterizing the road-marking performance.
The last type of procedure uses proprietary algorithms. The characteristics of the used camera and of the implemented algorithm are often unknown. In addition, there is no access to the raw data. Most of the time, these systems provide a score indicating the quality of the road marking line detection and sometimes a view range [
14,
21,
22,
23].
For example, Babic et al. [
23] investigated the differences in the detection quality and view range of a “Mobileye system” in dry daytime and night-time conditions. With this device, the detection of the road markings was slightly better in the night conditions. Pappalardo et al. [
24] proposed a generalized estimating equation model to estimate the fault probability among various effects of road features, such as the retroreflection of markings. The authors set a maximum fault probability of
as suggested by Reddy et al. [
25]. Different classes of retroreflection were explored to define situations respecting this threshold. Using their study case, they found that the recommendations of the European Commission [
10] (a minimum of 150 mcd·m
·lx
in dry weather and 35 mcd·m
·lx
in rainy weather) are adequate to fulfill the 10% fault probability.
Some studies [
21,
26,
27,
28,
29,
30] have attempted to find a relationship between ADAS performance and the characteristics of road markings. By testing different experimental conditions, they recommended threshold values of the standardized indicators to obtain good detection of the road marking lines by ADAS or a machine-vision system.
Table 1 gives a summary of the threshold values given in the literature.
For a given standardized indicator “
X” (
,
or
L), a contrast of “
X” (labelled
) between the road marking element and its surrounding pavement is sometimes considered and calculated:
where
is traditionally the mean value of
X on the considered scale of the marking element and
is the mean value of
X of the pavement surface surrounding the marking element. The pavement surface area considered for the calculation is rarely indicated in the literature. The threshold values of the contrast of several indicators recommended by the literature are given in
Table 2.
In [
32], Davies introduced the luminance contrast as an alternative to the
contrast. In [
31], Marr et al. found that a minimal value of 3 for the
contrast provided a reasonable confidence that MV would detect the line. It is noticeable that, despite the difference between the
and the luminance, similar contrast threshold values (between 2 and 3) of these two factors are recommended in the literature.
As shown in
Table 1 and
Table 2, there is a large variability in the threshold values from one study to another. This may be due to the fact that the MV systems (and the algorithms used) as well as the experimental conditions are not necessarily the same. Indeed, it is difficult to make a comparison because, most of the time, there is no information about these MV systems. Burghardt et al. [
13] emphasized that there is no real collaboration between MV developers and the researchers working on horizontal signalisation. Moreover, the areas considered (both for the marking element and its surrounding pavement) for the calculation are rarely provided, which can lead to discrepancies according to the state of the road.
1.4. Objectives of the Work
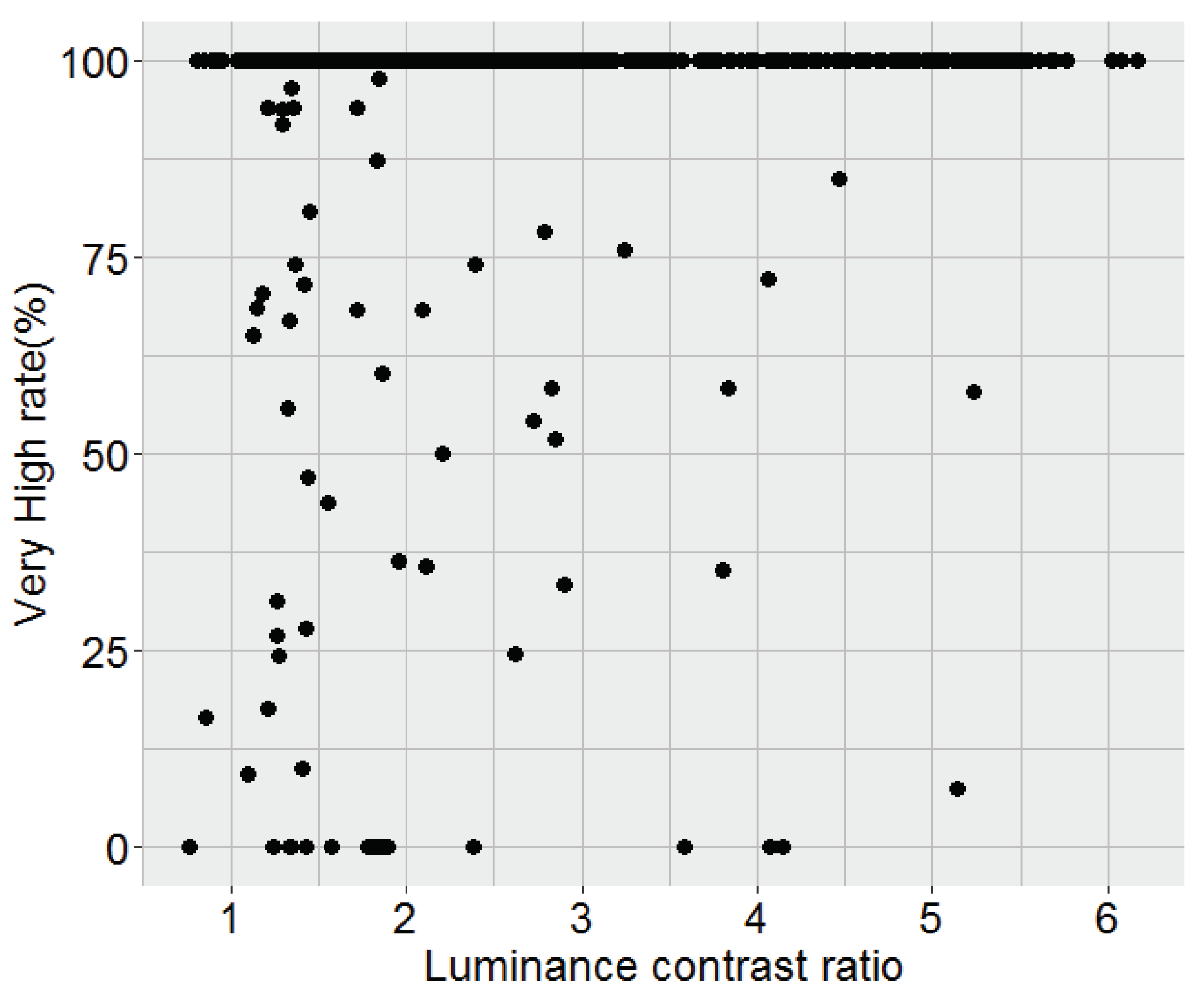
The objective of this work is to propose a more appropriate characterisation of the marking–pavement pair in relation to what is perceived by the MV systems on a dry road by day and, therefore, to propose a characterisation that would be more relevant for AV. We attempted to find a relationship between the performance of the tested machine-vision system and the luminance contrast between the road markings and the surrounding pavement.
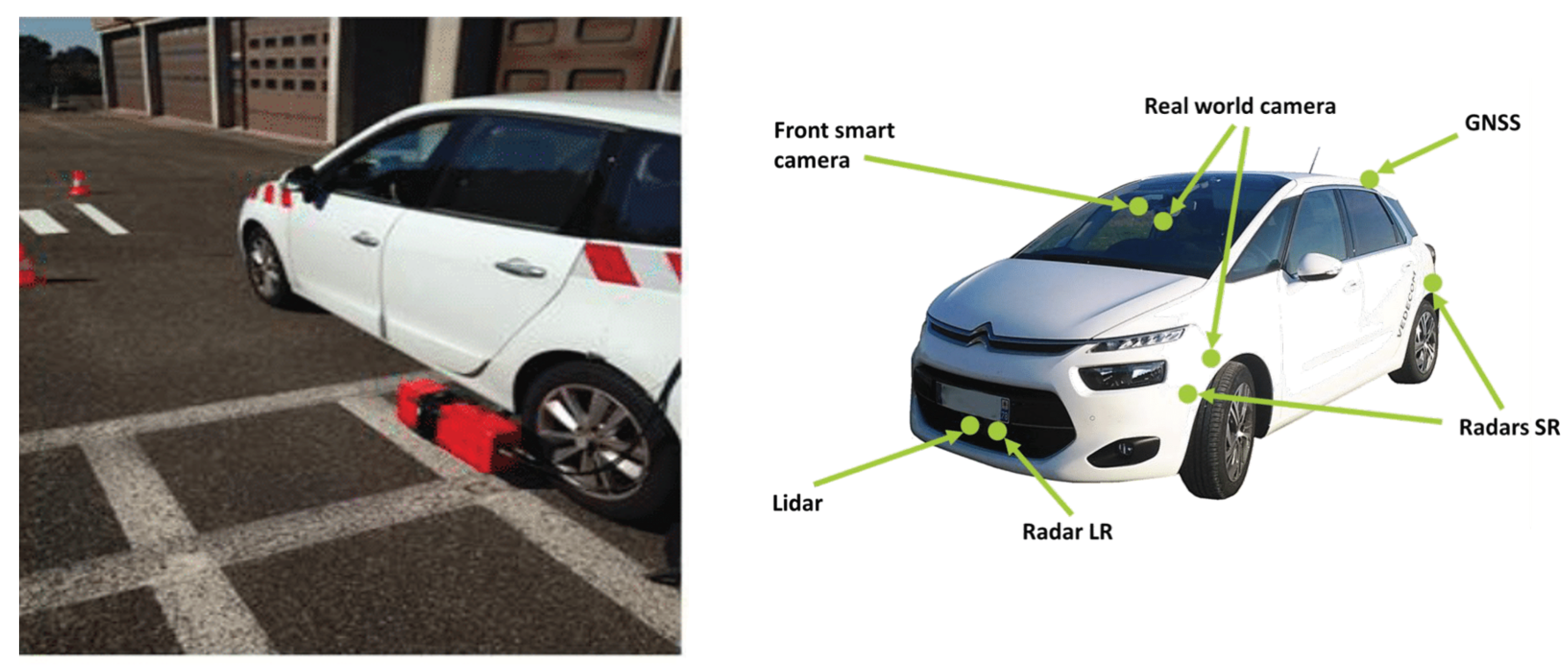
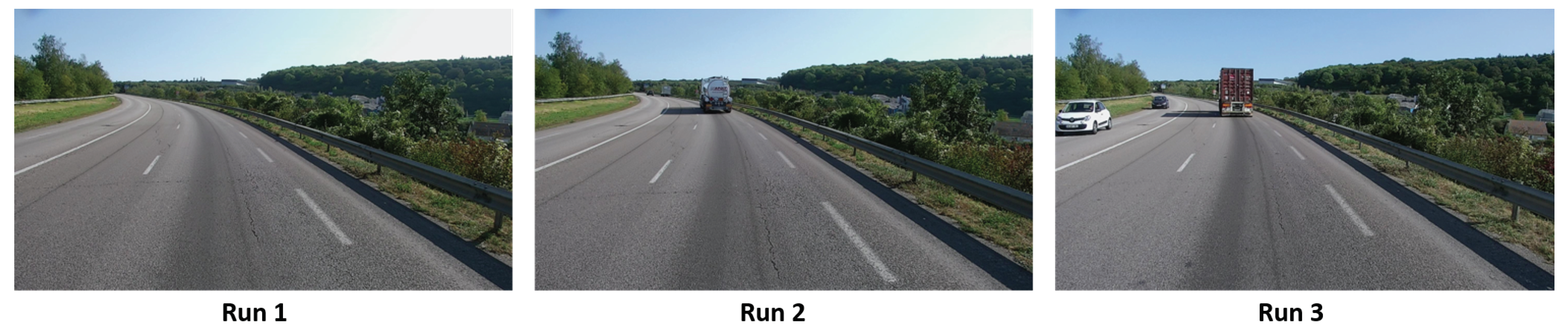
To do that, we used a dynamic retroreflectometer and a vehicle equipped with a commercialised “real world” camera associated with its proprietary software. We conducted an experiment by day on a section of a circulated road around the city of Rouen to answer the following questions:
Do the conditions of the road markings have a direct impact on the performance of a machine-vision system on dry roads?
Is the luminance contrast a reliable indicator of machine-vision performance by day?
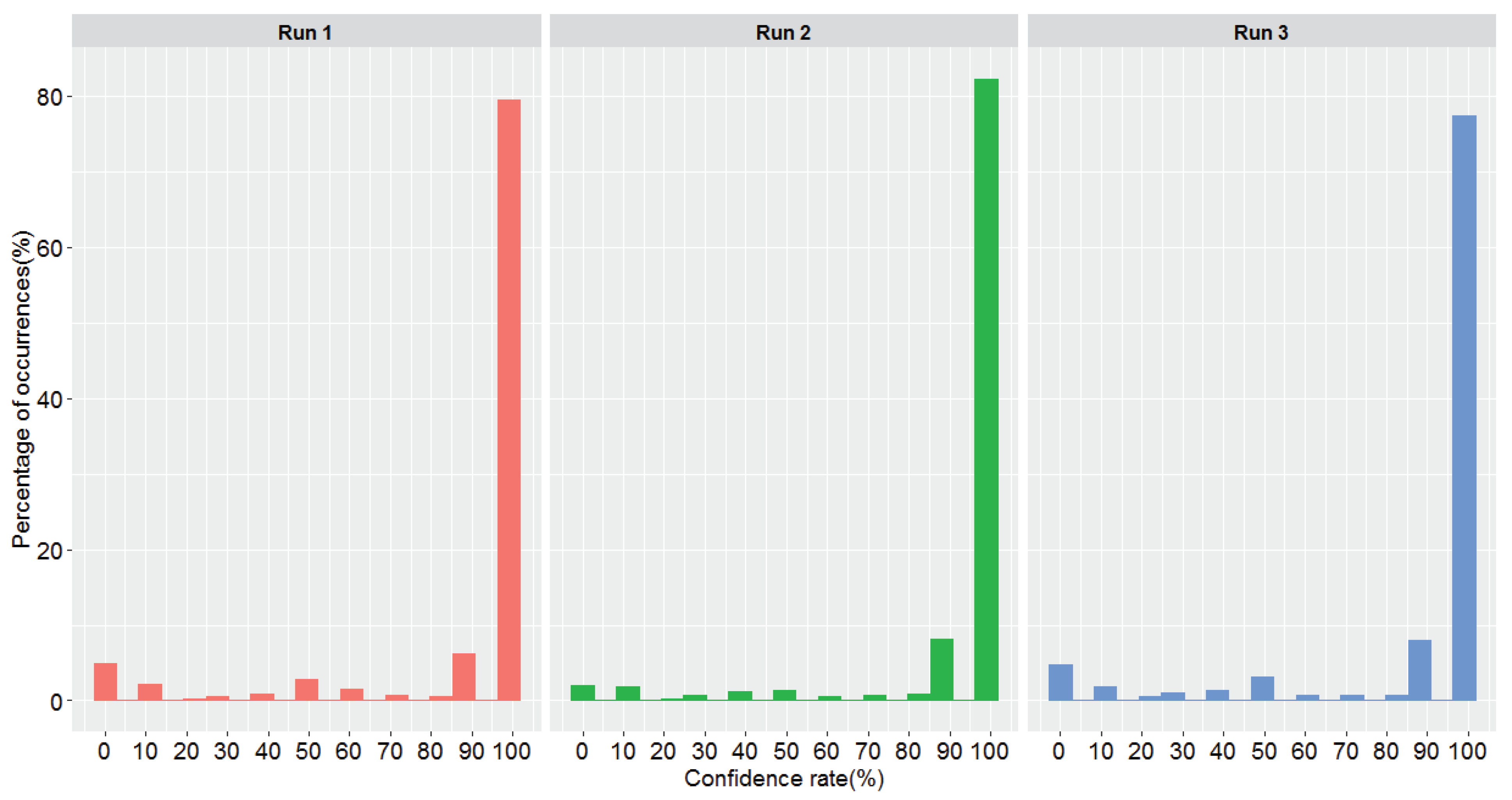
What is the reliability of a machine-vision system by day? Furthermore, in what cases is it less reliable?
After a description of the experiment and used vehicles, we present our statistical analysis and results separately for each device. We then compare the performances of both devices. A discussion of these results is finally conducted allowing a comparison with those of the literature and suggesting some perspectives.




 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










