1. Introduction
Electrical drive systems in vehicles are usually designed according to the requirements, e.g., extracted from endurance testing. The maximum loads occurring in the recorded time series data define the target performance of the developed drive system. In contrast to these requirements, the loads actually occurring in customer operation and thus the real customer requirements are quite different. In this respect, the analysis of vehicle- and market-specific customer data provides valuable information about the use of driving systems. In system design, this discrepancy in requirements affects the efficiency of the powertrain, among other things. Maximizing the efficiency of the overall system can lead to an increase in range and thus customer benefit.
By applying a previously published method [
1], statistical customer data are transformed into a customer-oriented driving cycle from which customer-relevant requirements can be derived. In contrast to already existing work, whose methods also deal with the synthesis of representative driving cycles, the methodical approach of this work pursues different goals and therefore differs in detail. The customer data used in [
2] are based only on statistical averages, while the database of this work contains statistics recorded from real customer usage. Compared to [
3], in this work, there is no categorization of subcycles in different driving styles or driving environments and no further subdivision of time series, but the approximation of distribution statistics. Due to the limited database of only 175 measurement series from real drives, the method according to [
4] does not fully capture the breadth of customer driving behavior and, in contrast to the customer data analyzed here, does not represent different markets. In summary, these methods do not represent a suitable or adequate approach for the ambition of this work.
The methodological approaches for derived design-relevant parameters presented in this paper are based on the methods from [
1] and serve to extend the existing method. Due to the ambiguity in the derivation of time series from statistical customer data, multiple criteria are required for the selection of relevant time series. This enables a customer-specific drive system design with the potential to increase efficiency compared to existing drives.
The basic cycle generation methods could be categorized into the following variants according to [
5]: (1) micro-trip based cycle construction, (2) segment-based cycle construction, (3) cycle construction with pattern classification, and (4) modal cycle construction. Despite of different methodical approaches, the sequencing of selected time series of all above-mentioned variants are based on stochastic or random principles. The influence of various subcycle sequences has been neglected. Due to the fact that varying the chronological order of loads and breaks affects the thermal behavior of powertrain components differently, it is necessary to investigate the sequence of the selected relevant time series regarding to their maximum loads and to identify the concatenations that may affect these loads most. Based on the importance of powertrain thermal safeguarding, it is necessary to investigate and evaluate the impact of different time series sequences regarding to the occurring loads. In this presented work, an extensive method developed on time frame-based analysis is introduced to assess varying load sequences. By doing this, a consequent safeguarding process against thermal stresses is achieved and the corresponding relevant design parameters are derived.
2. Improvement of Customer-Specific Drive Cycle Derivation
According to the method in [
1], statistical customer data are transformed into a combined driving cycle whose distribution statistics are as close as possible to those of the customer data. This cycle further serves for the derivation of design-relevant parameters for electric powertrains.
The following sections deal with the extension of the existing method. Additionally, it is important to mention that the actual method must be considered separately from the available database. While the quality of the data may vary, the method as such must be self-sufficiently applicable. In the context of the exemplary application in this work, it is assumed that the data used are plausible and contain the required information.
2.1. Evaluation of the Intersection of Multiple CLC-Data
The following investigations are based on customer load collective (CLC) data, which are event-based counts in the control unit of real customer vehicles. These data are stored in a cloud and can be retrieved and analyzed on a vehicle- or market-specific basis. Based on the available CLC data, only the distribution of acceleration versus velocity has been considered by the method so far. In order to increase the accuracy of the derived conclusions from the analysis of the customer data, additional CLC data will be evaluated. Depending on the availability of the CLC data for the specific vehicle, customer statistics, such as torque versus speed, as well as the mechanical power of the machine, can also be taken into account. Considering these data reduces the deviation to the customer data and thus increasing the quality of the derived conclusions by including additional information, e.g., acceleration and torque are not necessarily proportional; instead, torque includes the influence of slope.
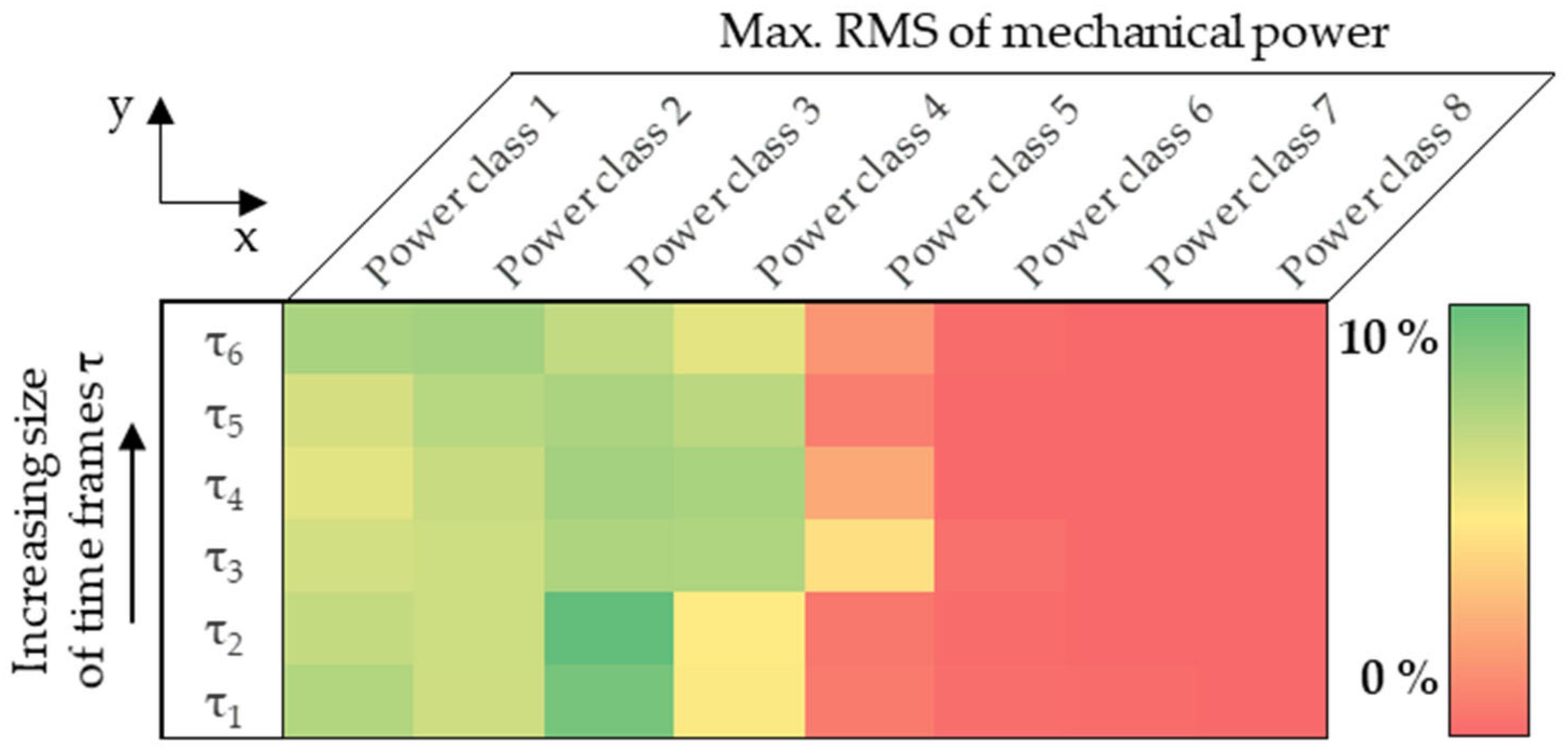
Thereby, the structure of the torque versus speed map is analogous to the acceleration versus velocity, whereas the mechanical power is already time-weighted in the CLC data. As the example in
Figure 1 shows, the classes in y-direction reflect ascending time frames τ, and the power classes in the x-direction represent certain power ranges. The number of power classes and time frames are chosen here as an example and influence the accuracy of the CLC data. Finally, the color scheme symbolizes the frequency of occurrence and thus represents the accumulation of the customers driving behavior.
The highest accumulation, represented by the green color, can be localized in this particular case around power class 3 for small time frames and becomes significantly lower for larger time frames. This tendency is caused by the maximum occurring root mean square value (RMS), which becomes smaller for larger time frames, e.g., due to breaks between the loads. In addition, the red marked area of the map shows that there are basically no operating points in customer use cases above power class 5.
As mentioned above, the method considers the distribution of acceleration vs. velocity as well as torque vs. speed and can finally be extended to take into account the frequency of the time-averaged mechanical power. As pointed out in [
1], the TFBA (time frame-based load analysis) provides additional information, such as duration and frequency of specific loads, and therefore increases the accuracy of the method. The deviation is calculated for those maps according to the method mentioned in [
1] and finally results in the total deviation, which serves as a measure for the relevance of each time series. This dimensionless variable becomes even smaller the more representative the respective time series is.
The determination of the time series is now based on the intersection of the criteria mentioned. An investigation shows that the algorithm considers fewer time series for the approximation to the customer data after implementation of these new criteria. At the same time, the length of the derived cycle as well as the deviation from the CLC data decreases. This increases the accuracy considerably, as more appropriate time series are selected. This extension of the method allows an improved approximation of customer behavior.
2.2. Concatenation of the Time Series
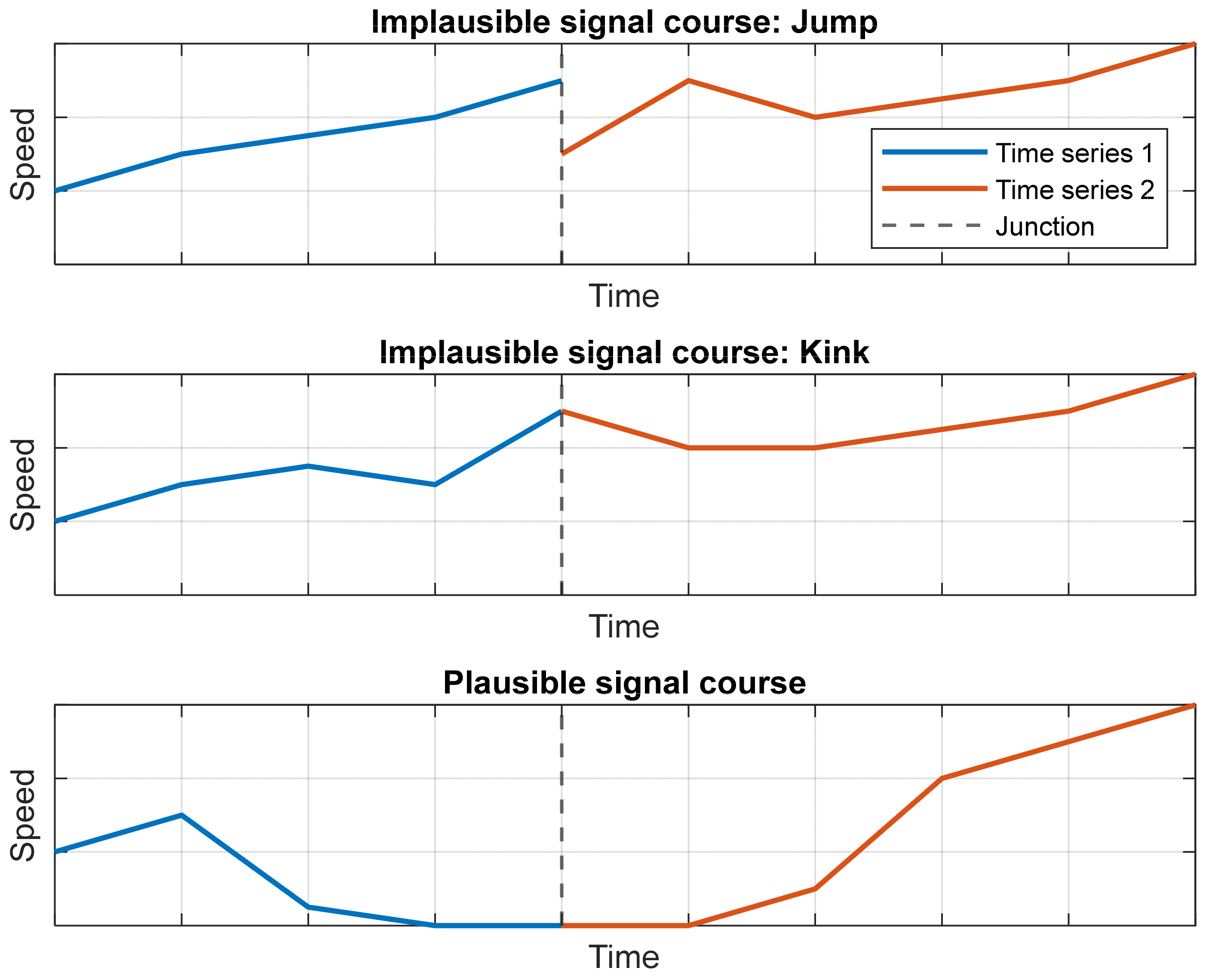
In order to combine time series with each other, it must be ensured that the signal courses are still continuous. Implausible signal characteristics, such as jumps or kinks, must be avoided. For example, this would be the case if both time series have different velocities at the junction. However, as
Figure 2 shows, it is not sufficient that the signal values of both time series match at the end and beginning, respectively. The gradient must also match to avoid kinks.
To ensure this, the method combines only time series that start and end at standstill, so the velocity is zero. This means that signals, such as speed, torque, or power, can be strung together without any problems and result in plausible signal progressions. Both speed and torque become zero at standstill, whereas auxiliary units or, e.g., the electrical DC-power of the drive system, contains the standby losses of the inverter and thus does not become zero.
The only exceptions regarding the concatenation of time series are state variables such as temperature or state of charge (SOC), since these quantities are not independent of temporal repeatability. For example, a certain load case, which runs several times in succession, causes the same signal trace for torque or power. In contrast, signals, such as temperature or SOC, can change significantly over the time series and consequently do not fit together. With signal types, a distinction must therefore be made between load and state variables. The methodical procedure is nevertheless permissible, since only mechanical load variables are considered in the context of this method in order to approximate the customers driving behavior.
2.3. Limitation of the Total Length
By limiting the total length of the combined time series, another extension of the method comes into play. The problem is caused by the algorithm combining multiple time series, creating a new cycle that extends over several hours in duration and hundreds of kilometers in distance. Due to the limited range, especially for electric vehicles, such a profile would not be drivable continuously. Therefore, building a cycle that exceeds the limit in range of vehicles needs to be avoided.
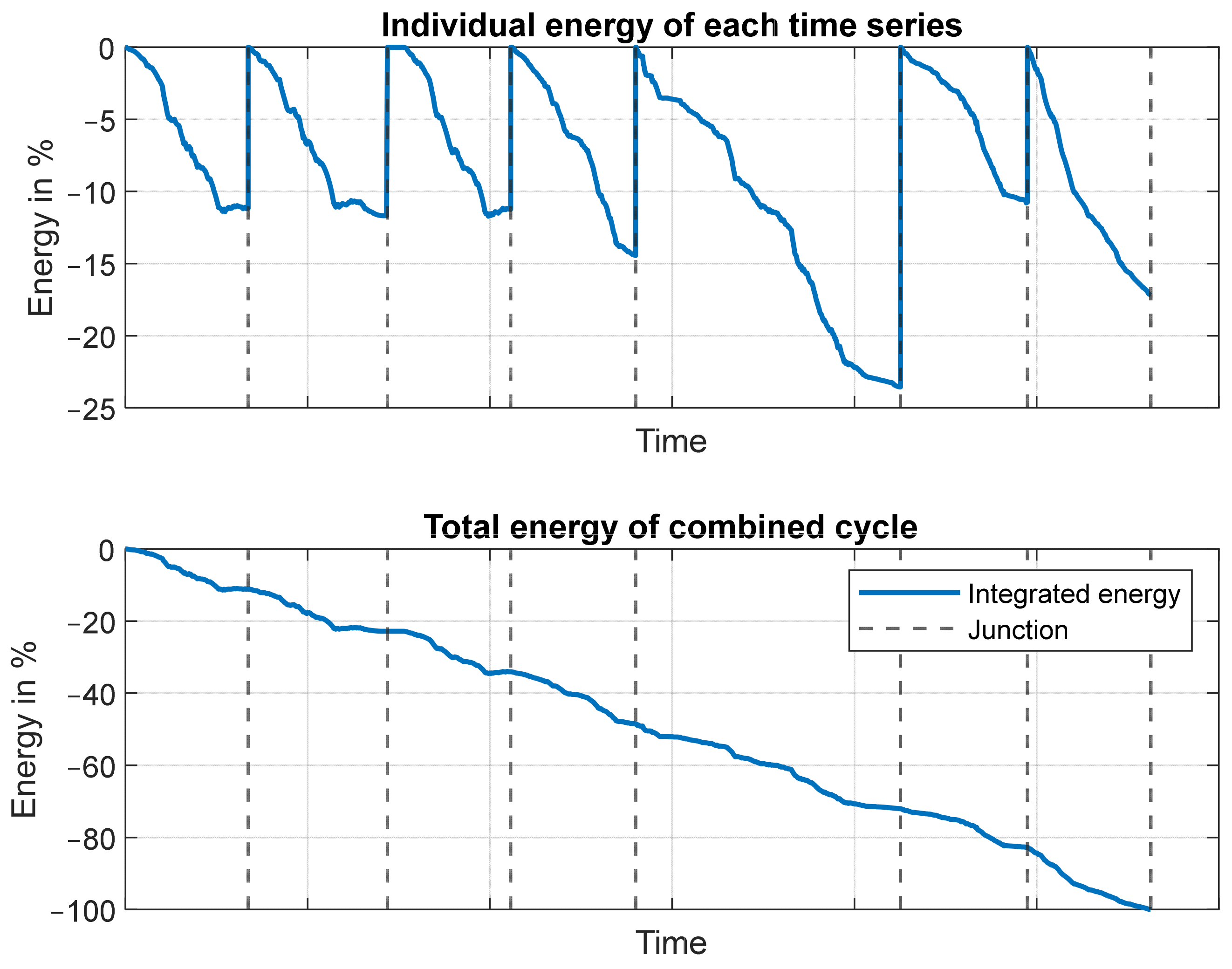
This derived cycle is used for the design of the electric drive components, such as power electronics, electrical machine, and transmission, which does not include the battery. Nevertheless, the battery capacity of the specific vehicle is requested by the method in order to limit the cycle and thus must first be stored. The algorithm then integrates the battery power of each time series, as exemplified in the top diagram in
Figure 3, and records the total energy in kWh. Finally, the concatenation of the relevant time series runs until the energy consumption of the combined cycles reaches, but does not surpass, the total capacity of the battery. The graph of the total energy consumption of the composite cycle can be seen in the exemplary bottom diagram in
Figure 3.
3. Analysis of Load Characteristics under Identical Conditions of Statistics
The authors in [
1] established a method including the criteria introduced in
Section 2, which delivers a customer-specific drive cycle without a specified chronological order. The benchmark of this method is a statistical parameter, which indicates the overall difference between customer CLC data and the combined time series in the region of interest. This benchmark parameter and all further statistics, e.g., the velocity and acceleration distributions, remain unchanged under the condition of varied cycle sequences.
However, time series chronological order could have a significant impact due to variable load peaks and breaks arising in different sequences, which results in varied thermal stresses and therefore influences various design factors of target drive system, e.g., cost, packaging, weight and manufacture. Therefore, the transition between the subcycles must be examined more closely. It is assumed that the selected time series can be combined in any order and all loads can occur at any point in time in the derived cycle.
The time frame-based analysis provides a key framework to understand the varying load characteristics caused by subcycle permutations for infinite, periodic recurring time series. Under the scope of the presented work, the constraint of time series recurrence is applied.
Section 3.1 introduces the phenomenon, that the varying cycle sequences give rise to different load characteristics.
Section 3.2 provides a novel method to identify the maximum design-relevant load within the valid time domain.
Section 3.3 defines a generalized metric to quantify the possible impact of subcycle permutations within the scope of the underlying work. This analysis provides essential information for the design and thermal protection of the components.
3.1. Impact of Time Series Sequences on Load Characteristics
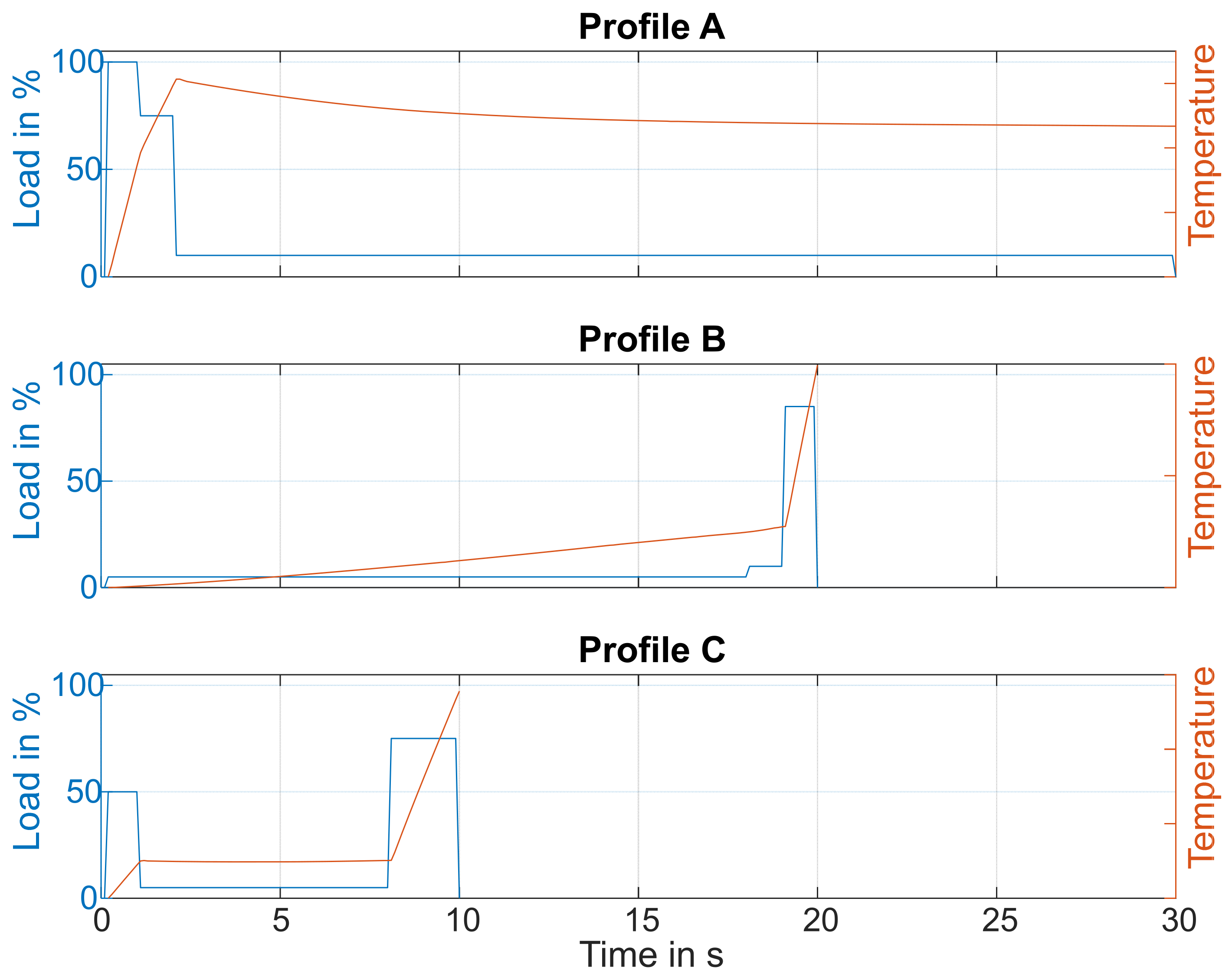
Three exemplary synthetic profiles A, B, and C are used, which represent drive events with loads occurring in different intensity, length, and position, such as alternating current in electric motor.
Figure 4 demonstrates the cause and effect between arising loads and the temperature profiles of a drive system component.
Under the premise that all requirements from
Section 2.2 are met, six composite cycles ABC, ACB, BAC, BCA, CAB, and CBA are generated by varying the sequences of given time series. The number of composite cycles corresponds to the factorial of the profiles count. In order to examine the load characteristics of all concatenations generated by
n time series, the time frame-based analysis needs to be performed
n! times.
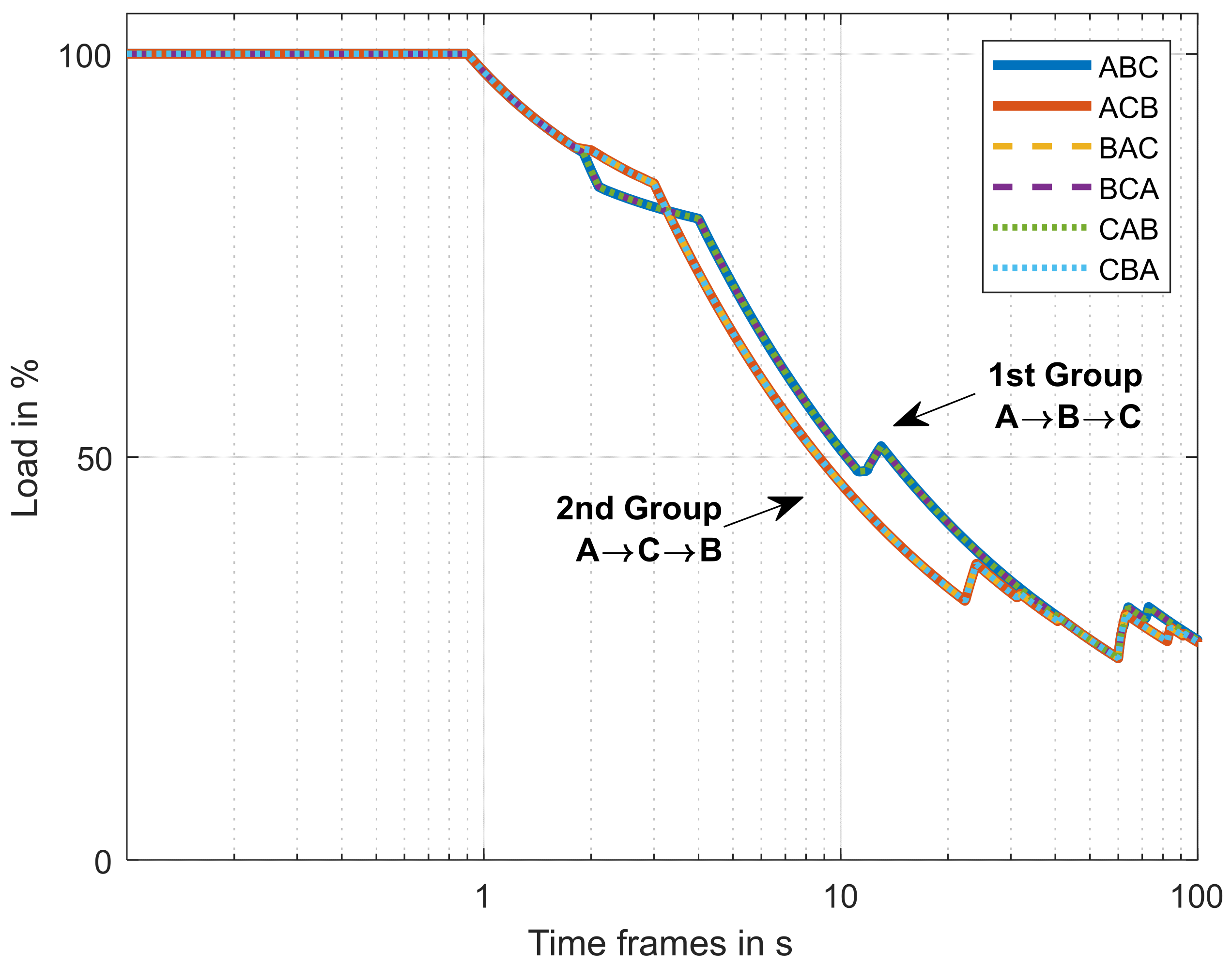
The authors in [
6,
7] introduced time-rated load periods curve, also known as time-dependent continuous load curves in [
1], depicted for the composite cycles in
Figure 5. Different loads resulting from subcycle sequences could be identified for specific time frames.
As
Figure 5 shows, two different groups of time-dependent continuous load curves could be identified out of six composite cycles. The first group of curves contains the combination of ABC, BCA, and CAB, while the second one contains ACB, BAC, and CBA. This observed two-way partition of composite cycles gives insight about the time frame-based load characteristics using the state-of-the-art TFBA algorithm from [
8]. The concatenations in each array of curves possess a unambiguous sequence, while the first subcycle could vary, e.g., ABC, BCA, and CAB correspond to sequence A → B → C and their starting time series are interchangeable. The observed results could be generalized, as concluded in Theorem 1.
Theorem 1. Once a unambiguous sequence of n given time series is identified, all composite cycles within this sequence exhibit the same load characteristics in the meaning of TFBA, while the selection of the starting subcycle is arbitrary.
Proof of Theorem 1. Given the periodic nature of time frame-based analysis, as well as the incorporated sliding window mechanism in TFBA algorithm, which are both thoroughly described and evaluated in [
8], consider the two following cases: (1) A time series is periodically expanded and fixed on the time axis. A sliding time window is moved toward the positive direction on the time axis until each section of the given time series is examined. (2) A time window is fixed on the time axis. A periodically expanded time series slides pass the given time window until the end of time series is reached. While case 1 characterizes the TFBA algorithm, case 2 corresponds to the situation described in Theorem 1. As long as each section of the given time series is examined within the given time window, these two cases are equivalent. □
Using Theorem 1, the number of concatenations of n input time series could be reduced by a factor of n, i.e., the number of composite cycles is effectively limited to factorial of n − 1. In order to identify the relevant parameters for a customer-specific drive system in the given example with three synthetic profiles, the TFBA only needs to be applied for two unambiguous cycle sequences in total.
In addition, a further reduction can be achieved based on an analysis of transitions between time series, which is particularly relevant for the case with large number of total target cycles. The corresponding approach will be presented in the following section.
3.2. Identification of Maximum Design-Relevant Loads
A high overall load occurs especially when high loads occur in a quick succession with very short breaks or even without breaks at all. For example, the components experience a higher thermal stress when one time series, where a high load occurs at the end, is combined with another time series, where a high load occurs right at the beginning. For this reason, the transition between two cycles is closely examined in this section with time frame-based analysis.
In order to obtain maximum time frame-based loads, the analysis procedure introduced in
Section 3.1 could be deployed. For
n time series, the required number of TFBA to be performed on the entire composite cycle would be (
n − 1)
!, which is computationally inadmissible once
n becomes larger. The optimization of the introduced approach should be considered. On the one hand, the number of TFBA to be executed could be restricted. On the other hand, the target time frame-based analysis domain could also be narrowed down. The maximum design-relevant loads derived from the entire composite cycle originate from two type of events: (1) Subcycle events, i.e., the entire events and the related peak loads occur only within each original time series. In fact, this type of event could be detected in advance before the composite cycle is derived. The required number of TFBA is in linear relation to the number of input cycles. (2) (
n-way) Transition events, which span across
n time series. This type of event contains at least one transition between two time series. The TFBA results of subcycle events are also implicitly contained in the results of transition events, since each original time series will be analyzed at least once during the examination of all types of transition events.
Assuming high loads only occur in the transition between two input cycles, i.e., only two-way transition events are considered, a new approach to identify the maximum design-relevant loads with respect to cycle sequences is purposed based on Theorem 2.
Theorem 2. For a composite cycle with n original time series, assume the design-relevant maximum loads are only related to subcycle events and two-way transition events. The peak loads of the composite cycle for each time frame up to the minimal time series duration could be represented by the envelope of time-dependent continuous load curves of all two-way combination based on original time series.
Proof of Theorem 2. Each time frame-based analysis within each two-way combination generates one time-dependent continuous load curve, which represents the maximum loads inside each two-way combination and therefore covers all subcycle events and two-way transition events based on the initial assumption in Theorem 2. The constraint of the minimal target time series duration is resulted by this assumption. Consider a time window longer than the minimal target cycle duration. Thus, it would be possible for that time window to contain the minimal input cycle as well as the ending part of previous cycle and the beginning of next cycle simultaneously. This type of load corresponds to the case of three-way transition events. The initial assumption is therefore violated. □
Using Theorem 2, the necessary number of TFBA executions is reduced from factorial, i.e., (
n − 1)
!, down to quadratic order of the binomial coefficient
, i.e.,
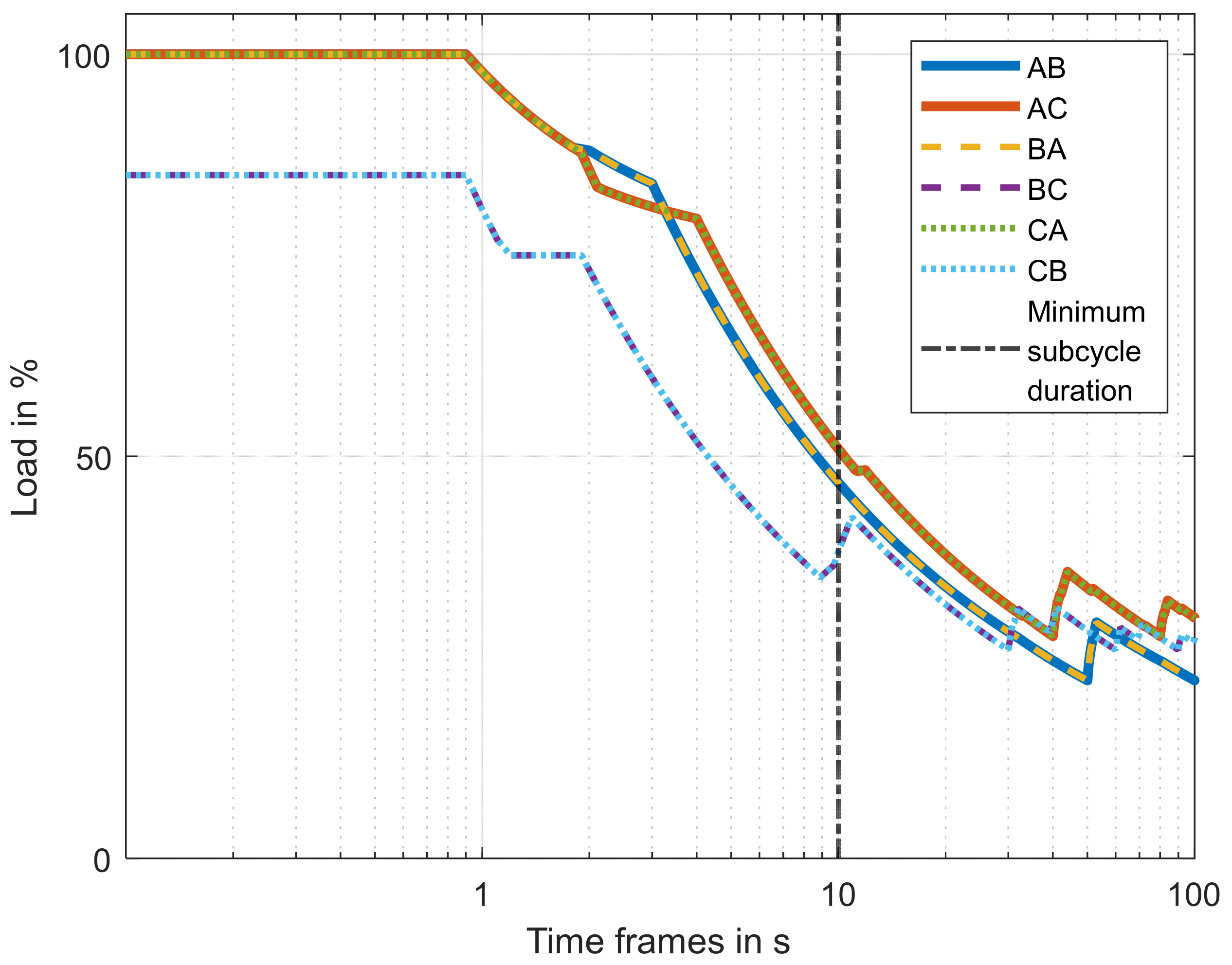
. By iteration of the proposed procedure, the limitation of minimal subcycle duration could eventually be lifted, while the required number of TFBA to be executed remains under the factorial order. The time frame-based analysis results of all two-way combinations in accordance with Theorem 2 are shown in
Figure 6.
Comparing the results in
Figure 5 within the constraint of minimum input cycle duration, all peak loads could be identified based on the envelope of time-dependent continuous load curves. The approach based on Theorem 2 substantially reduces the computational complexity and is therefore practically applicable for the use case of maximum design-relevant loads identification for up to
n time series.
Assuming a certain two-way combination possesses an overall maximum continuous load curve, the corresponding time series could be classified as most critical part of the derived cycle regarding to thermal stresses. Therefore, there is also an option of selecting a two-way concatenation and adjusting it properly so that it generates a maximum continues load curve over all time frames, while the representative customer drive behaviors should be retained. With this approach, relevant parameters for thermal safeguarding can be derived.
3.3. Estimation of Influence Based on Subcycle Concatenations
According to the definition in [
8,
9], four TFBA metrics
(peak load, 90% peak time window, continuous load, and continuous time window) are derived from each input time series.
Under the scope of the presented work, a simplified and extensible metric is defined to estimate the maximum influence for each two-way combination. Therefore, continuous value and time window from the predecessor time series are combined with peak value and 90% time window of the successor time series. Equation (1) shows the calculation of maximum value estimation
for the impact due to the varying sequences. The worst-case assumption, that the peak of the second time series directly appears after the first time series end, matches to the upper bound of the estimated values.
By using this parameter as well as selecting an appropriate threshold, all potentially critical two-way combinations could be identified and pre-selected for further examination.
4. Results
4.1. Derivation of the Composite Cycle
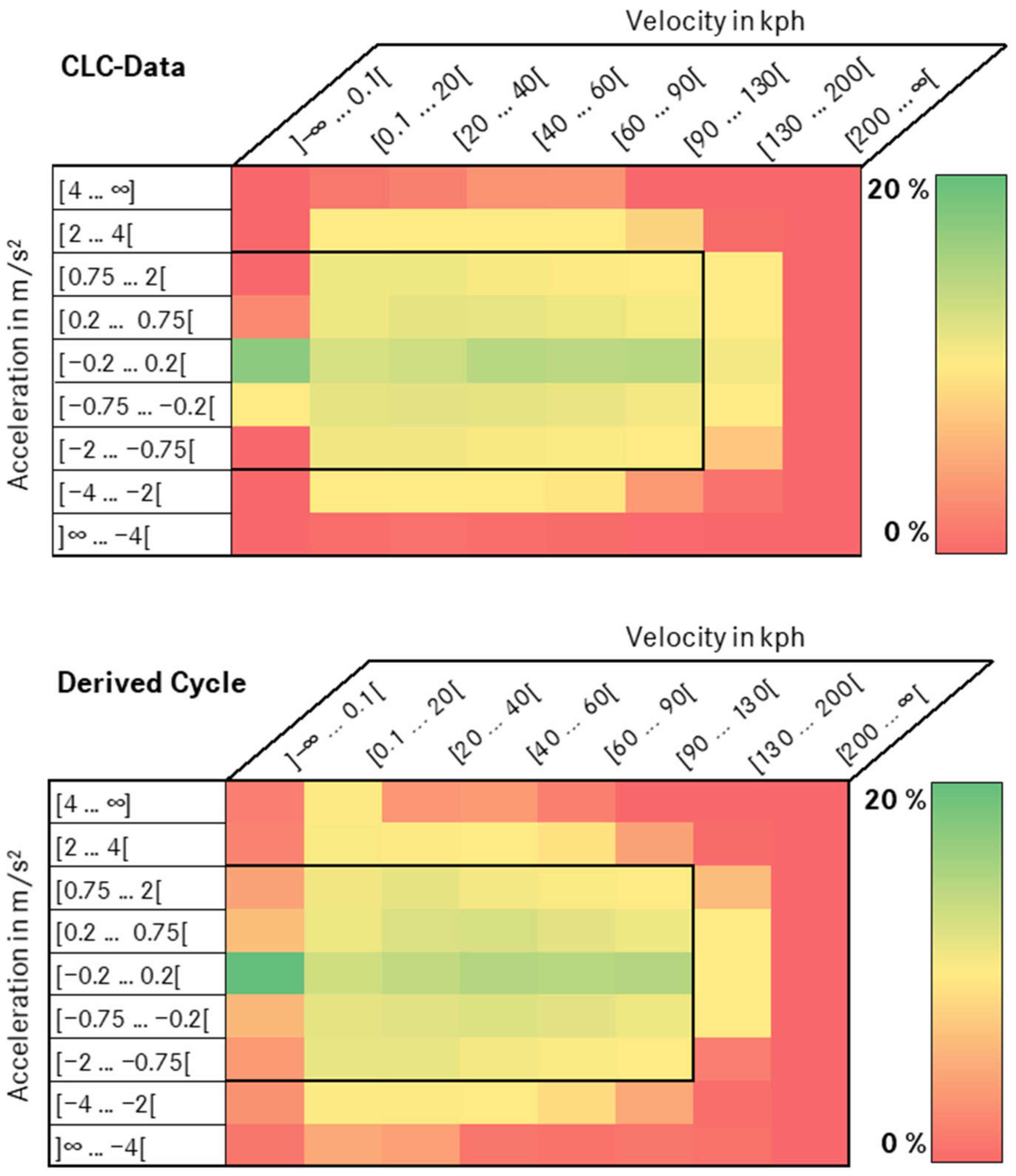
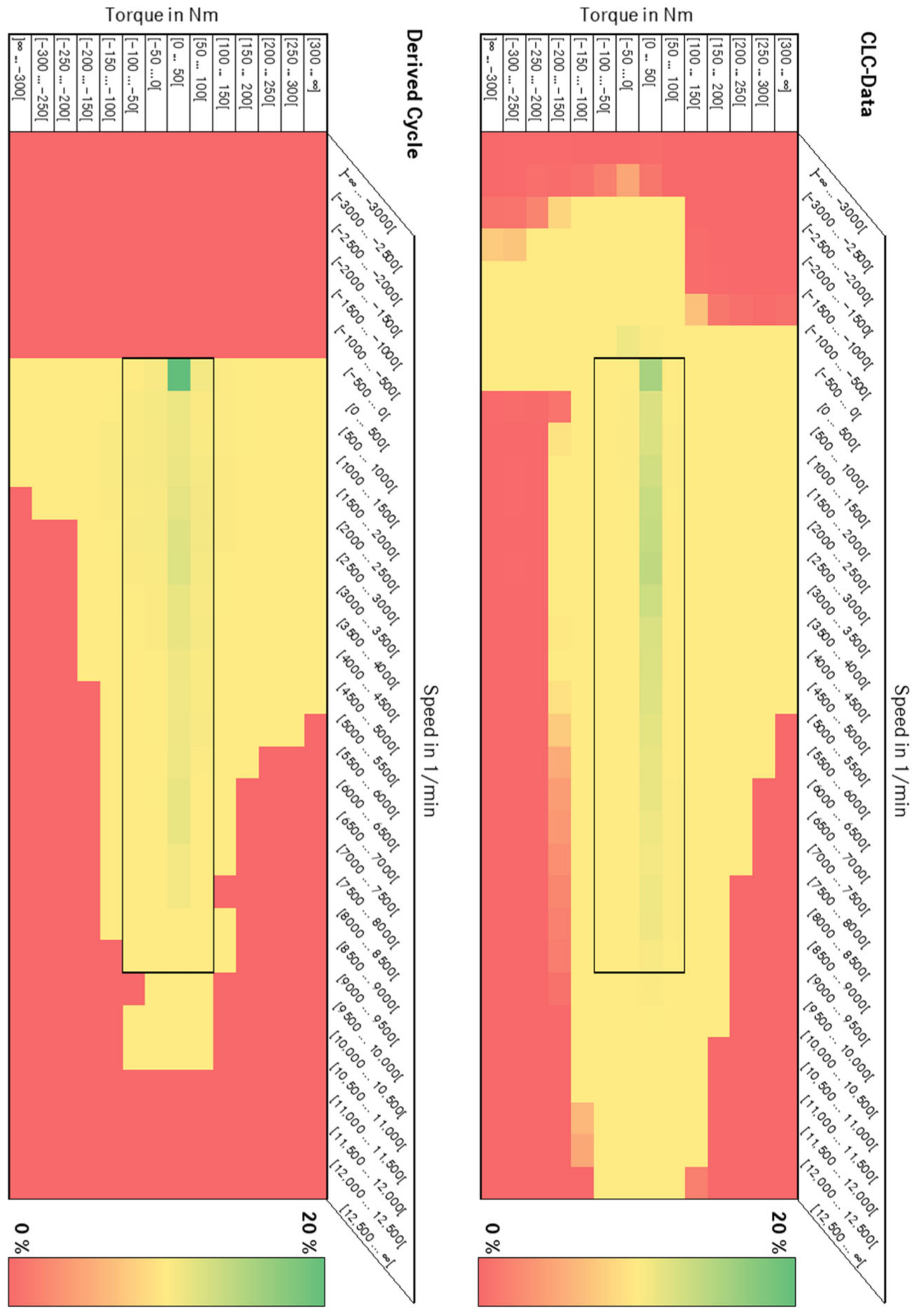
To illustrate the results of the presented method,
Figure 7 shows a comparison between the accumulation of the CLC-Data and the derived cycle. As already known, the color scheme of these diagrams represents the frequency distribution. These charts of acceleration vs. velocity serve as an example. Additional comparisons are included in
Figure A1 in the
Appendix A.
To generate the distribution table of the composite cycle, each of the time series used is first converted into a statistic and then merged depending on the proportion of time in the total cycle.
In order to quantify the distribution of the combined cycle from the initial customer data, the root mean square error (RMSE) of the deviation is calculated. This value indicates the accuracy with which the derived cycle approximates the customer statistics. Thus, a small value points out a good approximation. In this particular evaluation, the RMSE values of the deviation between both maps are approximately 0.4 for acceleration vs. speed, about 0.6 for torque vs. speed and about 2.6 overall. In contrast, the RMSE value of the deviation of only one criterion (see Figure 3 in [
1]) was greater than 3. Compared to that, the RMSE value has decreased significantly. This smaller value results from an even smaller deviation from the CLC-data and thus indicates an even better approximation of the customer behavior.
4.2. Time Frame-Based Analysis of the Composite Cycle
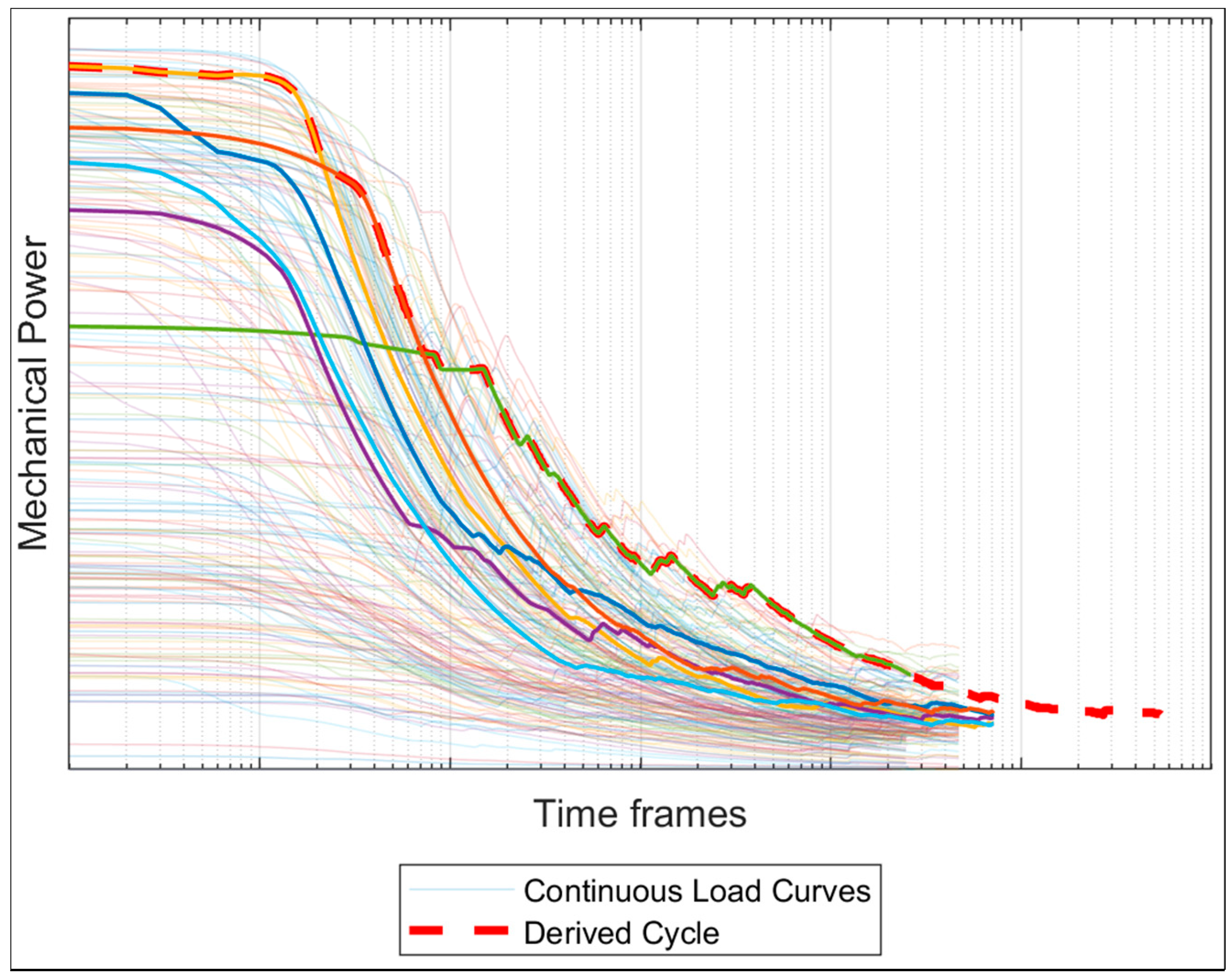
The following diagram in
Figure 8 shows the time-dependent continuous load curves of all considered time series (>20,000) using the example of mechanical power. These figures result from the time frame-based load analysis according to [
6] and display the maximum occurring RMS value for each time frame width as described in [
1].
As mentioned above, the derived cycle results from the concatenation of time series in order to reduce the deviation as much as possible. This cycle, represented by the red dashed line, is shown in
Figure 8 in comparison, both to the time series used for the derived cycle in the foreground and to all time series considered transparently in the background.
This graph reflects the load of the derived cycle compared to all time series and it becomes evident that the composite cycle does not include all of the high, infrequent loads. The reason for this can be seen in the frequency distribution maps, e.g., in
Figure 7, as high loads, such as high accelerations and velocities, occur too rarely to be considered in this cycle.
As the diagram shows, the derived cycle contains all combined time series. Therefore, as expected, the TFBA of the composite cycle represents an envelope curve of the combined time series.
4.3. Investigation of Subcycle Sequences Variation
Based on the previous analysis, the sequence of the selected subcycles has an impact on the course of the continuous load curves. With
n selected cycles, there are
n! possibilities for a concatenation of these cycles. Therefore, there are 720 (
6!) possible concatenations based on the six selected cycles shown in
Figure 8, but only 120 (
5!) compounds are unambiguous (cf.
Section 3.1).
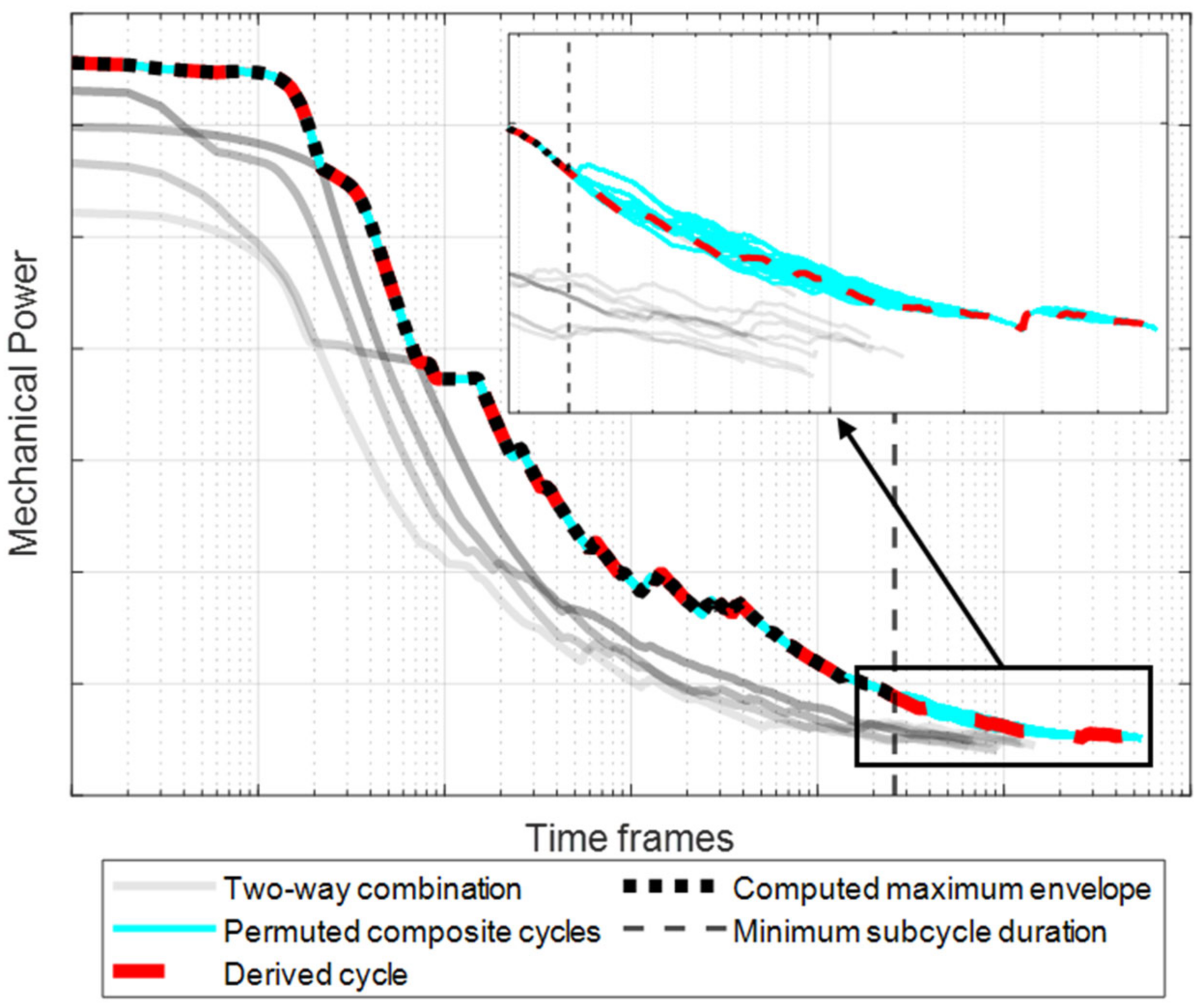
Figure 9 shows the corresponding continuous load curves. The time-dependent continuous load curves of the unambiguous concatenation are shown in turquoise and represent the possible range between maximum and minimum loads.
In addition, the continuous load curves of the two-way combinations and the time frame of the minimal subcycle duration are shown in
Figure 9. As explained in
Section 3.2, the relevant loads for the time frame up to the duration of the minimum subcycle can be identified by analyzing the two-way combinations. The computed enveloping continuous load curve is also visible. This curve corresponds to the maximum of all permuted composite cycles in the admissible range of the minimum subcycle duration.
It can be seen that in this example the sequence of the cycles has low influence on the course of the continuous load curves. The maximum relative deviation between the derived cycle and the enveloping continuous load curves of the two-way combination is less than 0.2% in the admissible range.
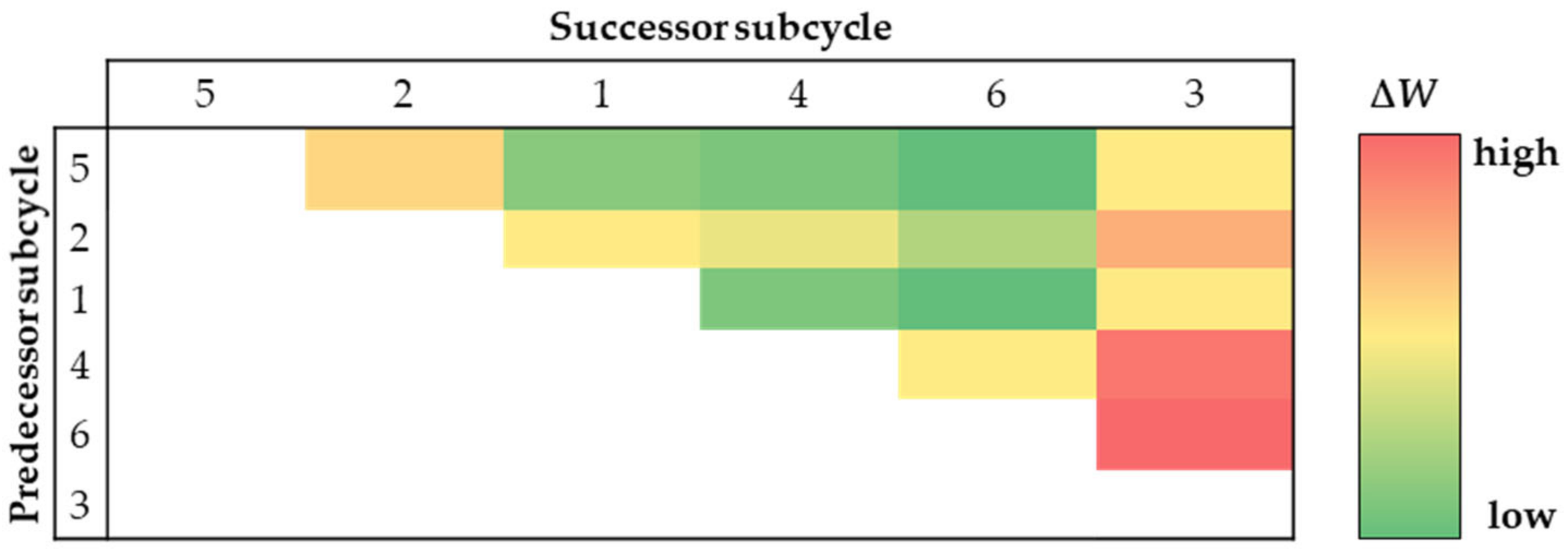
Moreover, using the method from
Section 3.3, the potentially relevant combinations are identified, which could critically influence the maximum time frame-based loads.
Figure 10 illustrates the result.
For this purpose and to place the focus on the influence of the peak of the following cycle, the input cycles are sorted in descending order with regard to their RMS value and only combinations where the following subcycle has a lower RMS are considered. Potentially relevant concatenations can be identified, and their impacts are estimated via the level of , assuming that a cycle can only occur once in the combination. In further analysis, these pre-selected combinations can be examined more precisely.
5. Conclusions and Future Work
The methods presented in this paper transfer statistical customer data into discrete time series in order to approximate the original distribution statistics as closely as possible. A composite cycle is derived and evaluated against related maximum time frame-based loads to identify the relevant design parameters.
The existing derivation method is based on a first criterion for the selection of suitable time series, the distribution statistics of acceleration vs. velocity. Consideration of additional CLC data will increase the accuracy in selecting appropriate time series. Therefore, the method is extended by the distribution statistics of torque vs. speed as well as the mechanical power of the machine. This reduces the number of relevant time series and increases the approximation of actual customer behavior. Moreover, when concatenating the time series, it must be ensured that the signal is still continuous; kinks or even jumps need to be avoided. Finally, limiting the total length of the composite cycle to the range of the vehicle is another innovation of this method.
These enhancements to the method ultimately result in a very small deviation of the derived cycle from the original customer data, as the results show. The RMSE of the deviation serves as measure for the approximation of the derived cycle to the customer statistics. This value ranges approximately between 0.4 and 0.6 for all customer data considered which indicates a very small deviation and thus a good approximation of customer behavior. However, as mentioned above, the method requires a valid and plausible database, which was assumed here.
Furthermore, the correlation between subcycle sequences and time frame-based load characteristics are investigated. Both subcycle and transition events within the composite cycle could generate loads on certain time window. The latter could result in varying time frame-based maximum loads, which do not occur in this form within a subcycle. Assuming that these loads can actually occur connected in reality, this leads to differences in design-relevant parameters, which could significantly affect the overall cost factors of a customer-specific drive system. The introduced approach of subcycle sequence analysis provides an evaluation framework regarding this issue and quantifies the impact of sequences as a deviation between the derived cycle and the computed maximum envelope of time frame-based loads.
In order to reduce complexity of the evaluation process, two theorems are introduced. Theorem 1 points out the unambiguous one-to-one relation between time series sequences and time frame-based load characteristics. Theorem 2 provides a foundation for the efficient computation of maximum envelope of relevant time frame-based loads in their admissible range using two-way combination. As a result, the required number of TFBA executions decreases from factorial down to quadratic order. Hence, it is possible to integrate the evaluation of a subcycle sequence’s influence on the mentioned derivation process of design-relevant parameters based on a different dataset.
The application of the evaluation method shows no significant deviation in the admissible range based on the selected dataset, so that the derivation of relevant parameters based on the original composite cycle is justified. However, if the evaluation process demonstrates a relatively large deviation between the composite cycle and the overall maximum time frame-based loads, certain thermal reserve must be considered within the derivation process of design-relevant parameters.
By applying the simplified metric from
Section 3.3, the impacts of potentially critical combinations in terms of maximum load can be estimated and selected for further analysis.
In summary, the aforementioned derivation and evaluation methods generate a contribution to the improved customer-specific drive system design, which is thoroughly safeguarded against potential thermal stresses according to the region of interest of customer behaviors.
Future work for these methods could include the quantitative analysis between time frame-based loads and the related component-specific thermal behavior, e.g., using thermal simulations. Furthermore, the impact of frequency of time frames should be further investigated. Based on these aspects, an extended algorithm for the identification of maximum thermal stresses over the total length of the composite cycles could be implemented.
Author Contributions
Conceptualization, methodology, software, validation, formal analysis, investigation, resources, data curation, writing—original draft preparation, writing—review and editing, visualization, project administration, funding acquisition, R.M., F.M. and R.Z.; supervision, F.G. and A.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research is funded by the Publication Fund of the Karlsruhe Institute of Technology, funding number 02034100761.
Data Availability Statement
No publicly archived datasets analyzed.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Figure A1.
Comparison of the frequency distribution of Torque vs. Speed.
Figure A1.
Comparison of the frequency distribution of Torque vs. Speed.
References
- Mieth, R.; Gauterin, F.; Pauli, F.; Kraus, H. Transfer of Statistical Customer Data into Relevant Parameters for the Design of Vehicle Drive Systems. Vehicles 2022, 4, 137–144. [Google Scholar] [CrossRef]
- Pfriem, M. Analyse der Realnutzung von Elektrofahrzeugen in kommerziellen Flotten zur Definition einer bedarfsgerechten Fahrzeugauslegung. Doctoral Dissertation, Karlsruher Institut für Technologie, Karlsruhe, Germany, 2015. (In German). [Google Scholar]
- Förster, D.; Inderka, F.; Gauterin, F. Data-driven identification of characteristic real-driving cycles based on k-means clustering and mixed-integer optimization. IEEE Trans. Veh. Technol. 2019, 69, 2398–2410. [Google Scholar] [CrossRef]
- Tewiele, S. Generierung von repräsentativen Fahr- und Lastzyklen aus realen Fahrdaten batterieelektrischer Fahrzeuge. Doctoral Dissertation, Universität Duisburg-Essen, Duisburg, Germany, 2020. (In German). [Google Scholar]
- Dai, Z.; Niemeier, D.; Eisinger, D. Driving cycles: A new cycle-building method that better represents real-world emissions. U.C. Davis-Caltrans Air Qual. Proj. 2008, 66, 37. [Google Scholar]
- Von Lingen, J.; Schmidt, P. Zeitgewichtete Belastung und Belastbarkeit und deren Nutzung für die Dimensionierung von Bahnenergieversorgungsanlagen. Elektrie 1994, 48, 448–457. (In German) [Google Scholar]
- Hofmann, G.; Röhlig, S. Zeitgewichtete Belastungsdauerkurve bei elektrische Bahnen. Elektr. Bahnen-EB 1997, 95, 272–279. (In German) [Google Scholar]
- Pauli, F. Allgemeingültige Beschreibung der Lebensdauerbelastung elektrischer Antriebskomponenten in Pkw auf Basis von Mess- und Simulationsdaten. Dissertation, Technische Universität Dresden, Dresden, Germany, 2016. (In German). [Google Scholar]
- Pauli, F.; Mueller, K. Statistische Untersuchung von zeitfensterbasierten Analyseergebnissen. Elektr. Bahnen-EB 2015, 113. (In German) [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










