
Sensitivity Analysis of a Driver’s Lumped Parameter Model in the Evaluation of Ride Comfort


Abstract
:1. Introduction
2. Numerical Modeling
2.1. Lumped-Parameter Model
2.2. Excitations
2.2.1. Single-Disturbance Excitations
2.2.2. Periodic Excitation
2.2.3. Stochastic Excitation
3. Results
3.1. Eight-DOF Lumped-Parameter Model with Default Parameter Values
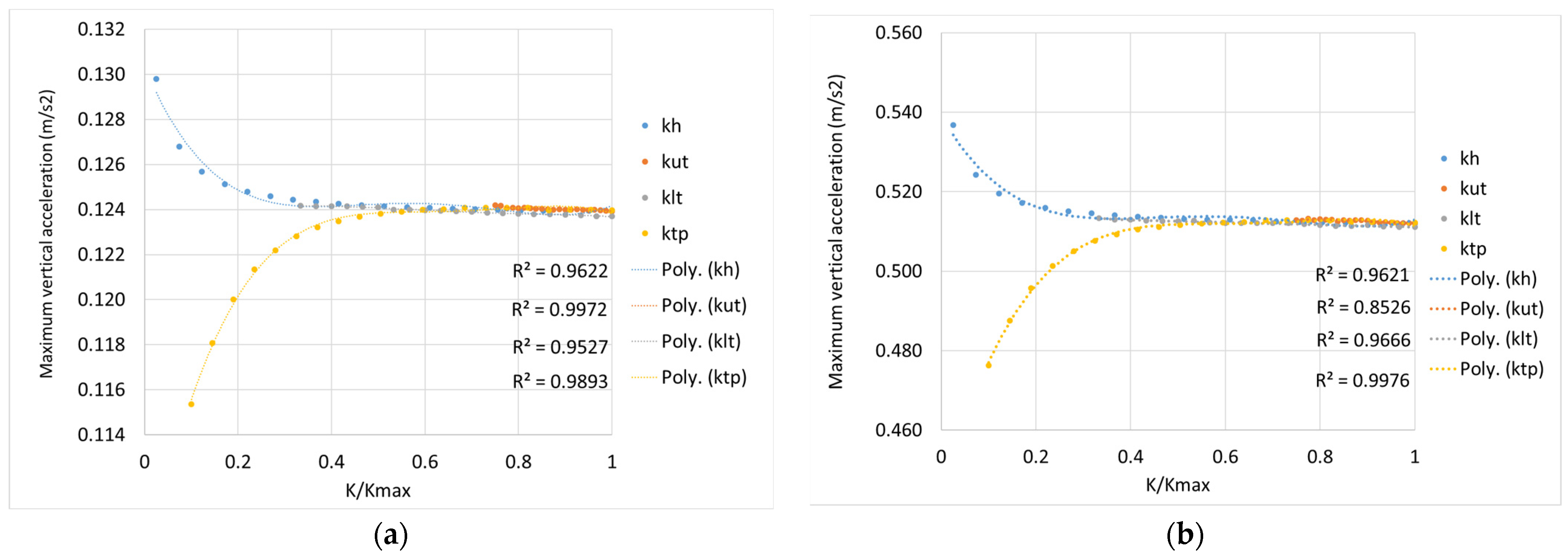
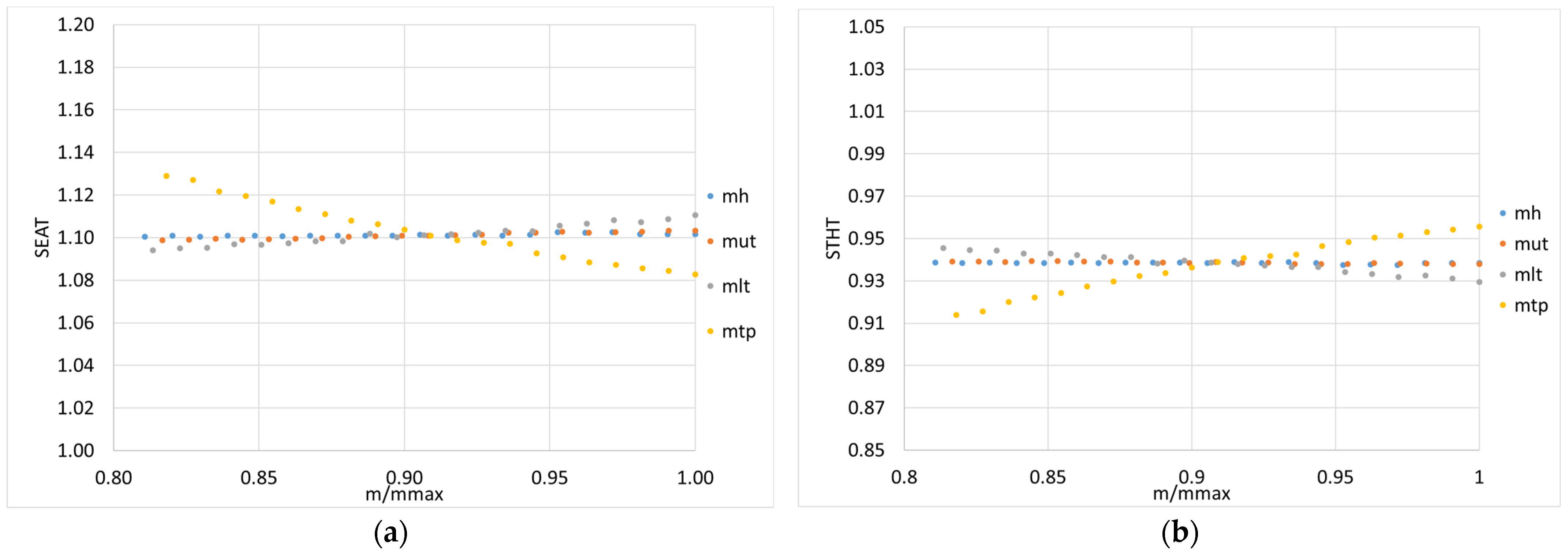
3.2. Sensitivity Analysis of the Mass, Stiffness and Damping Parameter Values of the Driver’s Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gosavi, P.; Pandit, M.; Gabhale, A.; Gajbhiye, N.; Patil, R.K. Determination of transmissibility responses of human seated body exposed to vibration. Int. Res. J. Eng. Technol. 2021, 8, 3098–3112. [Google Scholar]
- Popp, K.; Schiehlen, W. Ground Vehicle Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- ISO 2631-1:1997; Mechanical Vibration and Shock-Evaluation of Human Exposure to Whole-Body Vibration—Part 1: General Requirements. ISO: Geneva, Switzerland, 1997; pp. 42–44.
- ISO 2631-1:2010; Mechanical Vibration and Shock: Evaluation of Human Exposure to Whole Body Vibration, Part 1: General Requirements. ISO: Geneva, Switzerland, 2010.
- Heidarian, A.; Wang, X. Review on seat suspension system technology development. Appl. Sci. 2019, 9, 2834. [Google Scholar] [CrossRef]
- Kim, E.; Fard, M.; Kato, K. A seated human model for predicting the coupled human-seat transmissibility exposed to fore-aft wholebody vibration. Appl. Ergon. 2020, 84, 102929. [Google Scholar] [CrossRef] [PubMed]
- Anand, A.; Sudheesh Kumar, C.P. A review of whole-body vibration of seated occupants in moving vehicles. In Proceedings of the International Conference on Systems, Energy & Environment (ICSEE), Singapore, 3–5 February 2021. [Google Scholar]
- Al-Ashmori, M.; Wang, X. A systematic literature review of various control techniques for active seat suspension systems. Appl. Sci. 2020, 10, 1148. [Google Scholar] [CrossRef]
- Chen, X.; Song, H.; Zhao, S.; Xu, L. Ride comfort investigation of semi-active seat suspension integrated with quarter car model. Mech. Ind. 2022, 23, 18. [Google Scholar] [CrossRef]
- Zhao, Y.; Bi, F.; Shu, H.; Guo, L.; Wang, X. Prediction of the driver’s head acceleration and vibration isolation performance of the seating suspension system using the time and frequency domain modeling. Appl. Acoust. 2021, 183, 108308. [Google Scholar] [CrossRef]
- Du, H.; Li, W.; Zhang, N. Integrated seat and suspension control for a quarter car with driver model. IEEE Trans. Veh. Technol. 2012, 61, 3893–3908. [Google Scholar]
- Nagarkar, M.P.; Patil, G.J.V.; Patil, R.N.Z. Optimization of nonlinear quarter car suspension-seat-driver model. J. Adv. Res. 2016, 7, 991–1007. [Google Scholar] [CrossRef]
- Jain, S.; Saboo, S.; Pruncu, C.I.; Unune, D.R. Performance investigation of integrated model of quarter car semi-active seat suspension with human model. Appl. Sci. 2020, 10, 3185. [Google Scholar] [CrossRef]
- Boileau, P.; Wu, X.; Rakheja, S. Definition of a range of idealized values to characterize seated body biodynamic response under vertical vibration. J. Sound Vib. 1998, 215, 841–862. [Google Scholar] [CrossRef]
- Bai, X.X.; Xu, S.X.; Cheng, W.; Qian, L.J. On 4-degree-of-freedom biodynamic models of seated occupants: Lumped-parameter modeling. J. Sound Vib. 2017, 402, 122–141. [Google Scholar] [CrossRef]
- Koulocheris, D.; Vossou, C. A Comparative Study of Integrated Vehicle–Seat–Human Models for the Evaluation of Ride Comfort. Vehicles 2023, 5, 156–176. [Google Scholar] [CrossRef]
- Boileau, P.É.; Rakheja, S. Whole-body vertical biodynamic response characteristics of the seated vehicle driver: Measurement and model development. Int. J. Ind. Ergon. 1998, 22, 449–472. [Google Scholar] [CrossRef]
- Gillespie, T. Fundamentals of Vehicle Dynamics; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Paliwal, V.; Dobriyal, R.; Kumar, P. Dynamic analysis of a quarter car model moving over a gaussian bump. J. Graph. Era Univ. 2020, 2020, 78–86. [Google Scholar]
- Paliwal, V.; Dobriyal, R.; Kumar, P.; Manral, A.R. Effect of Varying Road Profile Amplitude on the Behavior of a Nonlinear Quarter Car Model. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2021; Volume 1149, p. 012015. [Google Scholar]
- Barethiye, V.; Pohit, G.; Mitra, A. Analysis of a quarter car suspension system based on nonlinear shock absorber damping models. Int. J. Automot. Mech. Eng. 2017, 14, 4401–4418. [Google Scholar] [CrossRef]
- Mitra, A.C.; Desai, G.J.; Patwardhan, S.R.; Shirke, P.H.; Kurne, W.M.; Banerjee, N. Optimization of passive vehicle suspension system by genetic algorithm. Procedia Eng. 2016, 144, 158–1166. [Google Scholar] [CrossRef]
- Verros, G.; Natsiavas, S.; Papadimitriou, C. Design optimization of quarter-car models with passive and semi-active suspensions under random road excitation. J. Vib. Control 2005, 11, 581–606. [Google Scholar] [CrossRef]
- T.C. ISO/TC. M. Vibration, S.S.S. Measurement, E. of Mechanical Vibration, S. as Applied to Machines, Mechanical Vibration–Road Surface Profiles–Reporting of Measured Data; International Organization for Standardization: Geneva, Switzerland, 1995; Volume 8608. [Google Scholar]
- Gündogdu, Ö. Optimal seat and suspension design for a quarter car with driver model using genetic algorithms. Int. J. Ind. Ergon. 2007, 37, 327–332. [Google Scholar] [CrossRef]
- Abbas, W.; Abouelatta, O.B.; El-Azab, M.; Megahed, A. Application of genetic algorithms to the optimal design of vehicle’s driver seat suspension model. In Proceedings of the World Congress on Engineering, London, UK, 30 June–2 July 2010; Volume 2. [Google Scholar]
- Abbas, W.; Emam, A.; Badran, S.; Shebl, M.; Abouelatta, O. Optimal seat and suspension design for a half-car with driver model using genetic algorithm. Intell. Control. Autom. 2013, 4, 199–205. [Google Scholar] [CrossRef]
- Behari, N.; Noga, M. Vibration transmissibility behaviour of simple biodynamic models used in vehicle seat design. Czas. Tech. 2016, 15, 3–12. [Google Scholar]
- Ghasemi-Goneyrania, S.; Malekib, A. Evaluation of optimized lumped-parameter models of seated human body ex-posed to vertical vibration. In Proceedings of the 10th International Conference on Acoustics & Vibration (ISAV2020), Tehran, Iran, 17–18 February 2021. [Google Scholar]
- Zhang, S.; Shi, W.; Chen, Z. Modeling and parameter identification of seated human body with the reference vector guided evolutionary algorithm. Adv. Mech. Eng. 2021, 13, 16878140211062679. [Google Scholar] [CrossRef]
- Adam, S.A.; Jalil, N.A.A. Vertical suspension seat transmissibility and seat values for seated person exposed to whole-body vibration in agricultural tractor preliminary study. Procedia Eng. 2017, 170, 435–442. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| N/m | 310,000 | |
| N/m | 183,000 | |
| N/m | 162,800 | |
| N/m | 90,000 | |
| Ns/m | 400 | |
| Ns/m | 4750 | |
| Ns/m | 4585 | |
| Ns/m | 2064 |
| Road Class | Lower Limit | Geometric Mean | Upper Limit |
|---|---|---|---|
| A (very good) | - | 16 | 32 |
| B | 32 | 64 | 128 |
| C | 128 | 256 | 512 |
| D | 512 | 1024 | 2048 |
| E (very poor) | 2048 | 4096 | 8192 |
| Excitation | Maximum Value (m/s2) | RMS Value (m/s2) |
|---|---|---|
| Speed Bump | 0.1238 | - |
| Pothole | 0.5123 | - |
| Periodic | - | 0.6805 |
| Grade E | - | 0.0005 |
| Excitation | SEAT | STHT |
|---|---|---|
| Speed Bump | 1.10 | 1.05 |
| Pothole | 1.10 | 1.05 |
| Periodic | 1.11 | 0.93 |
| Grade E | 0.76 | 0.48 |
| Parameter | Unit | Minimum Value | Maximum Value | Increment |
|---|---|---|---|---|
| kg | 6.0 | 7.4 | 0.070 | |
| kg | 26.3 | 32.2 | 0.295 | |
| kg | 9.6 | 11.8 | 0.110 | |
| kg | 14.4 | 17.6 | 0.160 | |
| N/m | 10,000 | 400,000 | 19,500 | |
| N/m | 150,000 | 200,000 | 2500 | |
| N/m | 100,000 | 300,000 | 10,000 | |
| N/m | 10,000 | 100,000 | 4500 |
| Excitation | Speed Bump | Pothole | Periodic | Grade E | ||||
|---|---|---|---|---|---|---|---|---|
| Maximum Vertical Acceleration (m/s2) | Maximum Vertical Acceleration (m/s2) | RMS Vertical Acceleration (m/s2) | RMS Vertical Acceleration (m/s2) | |||||
| Parameter | Minimum | Maximum | Minimum | Maximum | Minimum | Maximum | Minimum | Maximum |
| 0.123 | 0.125 | 0.509 | 0.516 | 0.679 | 0.683 | 0.001 | 0.008 | |
| 0.121 | 0.127 | 0.499 | 0.527 | 0.673 | 0.689 | 0.001 | 0.009 | |
| 0.123 | 0.125 | 0.507 | 0.518 | 0.678 | 0.684 | 0.002 | 0.007 | |
| 0.122 | 0.126 | 0.505 | 0.520 | 0.677 | 0.686 | 0.002 | 0.006 | |
| 0.124 | 0.127 | 0.512 | 0.537 | 0.681 | 0.694 | 0.001 | 0.008 | |
| 0.124 | 0.124 | 0.512 | 0.513 | 0.681 | 0.682 | 0.002 | 0.008 | |
| 0.124 | 0.124 | 0.511 | 0.513 | 0.680 | 0.683 | 0.002 | 0.007 | |
| 0.115 | 0.124 | 0.476 | 0.513 | 0.663 | 0.686 | 0.002 | 0.009 | |
| 0.124 | 0.126 | 0.512 | 0.517 | 0.681 | 0.697 | 0.002 | 0.007 | |
| 0.124 | 0.125 | 0.513 | 0.515 | 0.681 | 0.682 | 0.001 | 0.008 | |
| 0.124 | 0.125 | 0.513 | 0.515 | 0.681 | 0.682 | 0.002 | 0.008 | |
| 0.123 | 0.125 | 0.509 | 0.517 | 0.679 | 0.682 | 0.002 | 0.007 | |
| Excitation | Maximum Vertical Acceleration (m/s2) | RMS Vertical Acceleration (m/s2) | ||
|---|---|---|---|---|
| Speed Bump | Pothole | Periodic | Grade E | |
| Parameter | ||||
| 0.002 | 0.006 | 0.004 | 0.006 | |
| 0.007 | 0.028 | 0.016 | 0.007 | |
| 0.002 | 0.011 | 0.006 | 0.005 | |
| 0.003 | 0.015 | 0.009 | 0.005 | |
| 0.003 | 0.025 | 0.013 | 0.006 | |
| 0.000 | 0.001 | 0.001 | 0.007 | |
| 0.000 | 0.002 | 0.003 | 0.005 | |
| 0.009 | 0.037 | 0.023 | 0.007 | |
| 0.002 | 0.005 | 0.016 | 0.005 | |
| 0.001 | 0.002 | 0.001 | 0.007 | |
| 0.001 | 0.003 | 0.001 | 0.007 | |
| 0.002 | 0.008 | 0.003 | 0.005 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koulocheris, D.; Vossou, C. Sensitivity Analysis of a Driver’s Lumped Parameter Model in the Evaluation of Ride Comfort. Vehicles 2023, 5, 1030-1045. https://doi.org/10.3390/vehicles5030056
Koulocheris D, Vossou C. Sensitivity Analysis of a Driver’s Lumped Parameter Model in the Evaluation of Ride Comfort. Vehicles. 2023; 5(3):1030-1045. https://doi.org/10.3390/vehicles5030056
Chicago/Turabian StyleKoulocheris, Dimitrios, and Clio Vossou. 2023. "Sensitivity Analysis of a Driver’s Lumped Parameter Model in the Evaluation of Ride Comfort" Vehicles 5, no. 3: 1030-1045. https://doi.org/10.3390/vehicles5030056
APA StyleKoulocheris, D., & Vossou, C. (2023). Sensitivity Analysis of a Driver’s Lumped Parameter Model in the Evaluation of Ride Comfort. Vehicles, 5(3), 1030-1045. https://doi.org/10.3390/vehicles5030056