
A Vehicle Crash Simulator Using Digital Twin Technology for Synthesizing Simulation and Graphical Models



Abstract
:1. Introduction
- Simpy-based simulation for vehicle collisions,
- Unity-based animation for visualization of the collision using the simulation results.
2. Related Work
2.1. Vehicle Driving Simulators
2.2. Vehicle Crash Simulators
3. Problem Statement
- The existing vehicle simulators are aimed at safe driving, and it is difficult to simulate collisions between vehicles. A collision between two vehicles is affected by various environmental variables such as vehicle size, road condition, and accident scenario. Involvement of these multiple variables complicates simulation of a crash accident on the basis of a slight change in the value of one variable (e.g., an increase in vehicle speed by 10 km).
- The existing simulators can only simulate driving in vehicles and environments specified by their developers. Although some simulators use open software policies, limited situations can be simulated.
- Most simulators focus on 3D graphics for animation. However, simulators should also be able to predict an accident on the basis of specific parameters and iterative analysis. Thus, simulation and animation must complement each other, such as in digital twin technology.
- Our proposed simulator considers accident characteristics by applying models saved in our model repository. Users can select pre-implemented models from the repository and run a synthesized model to simulate various vehicle crash accidents. The result of the executed simulation is displayed visually as an animation.
- The proposed simulator can be directly developed by the users with Simpy-based vehicle models and Lambda-based road map models to simulate various crash accidents. In addition, the models can be freely modified from each base in the repository component.
- Our simulator synthesizes models including bases for vehicle crash accidents, simulates them, and displays crash animations before and after the collision. The simulator defines the state change of an event for animation and the information to transmit it to the animation. In addition, the animation is configured in the same situation as the model synthesized from the model base.
4. Proposed Simulator
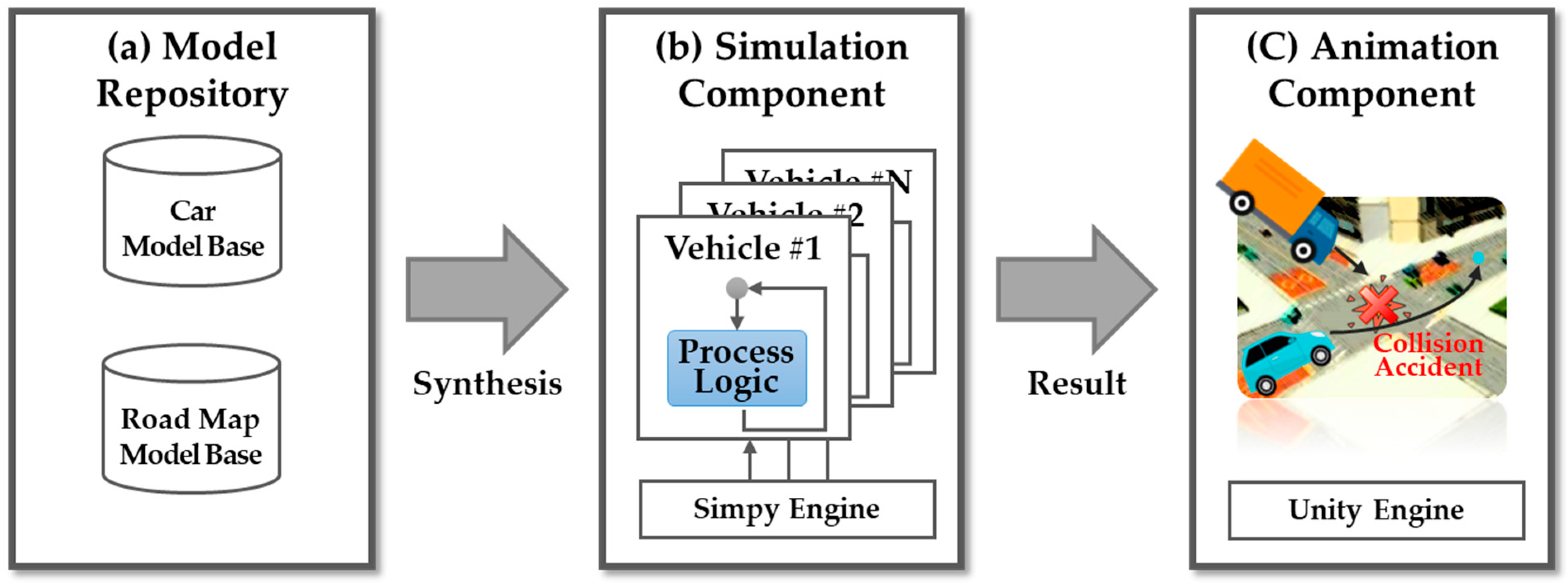
4.1. Overview
- Model repository: In this repository, the two model bases are vehicles and road maps. Simpy-based discrete-event models for vehicles consider behavioral and procedural characteristics and are synthesized to generate a final simulation model.
- Simulation component: This component runs the synthesized model through the Simpy engine and forwards the events generated to the model. The vehicle simulation model behavior is changed at regular intervals (e.g., simulation time). The execution of the component is repeated according to the state variable of the model until the distance between the two vehicles is 0. Simulation results are transmitted to the animation elements using JSON templates.
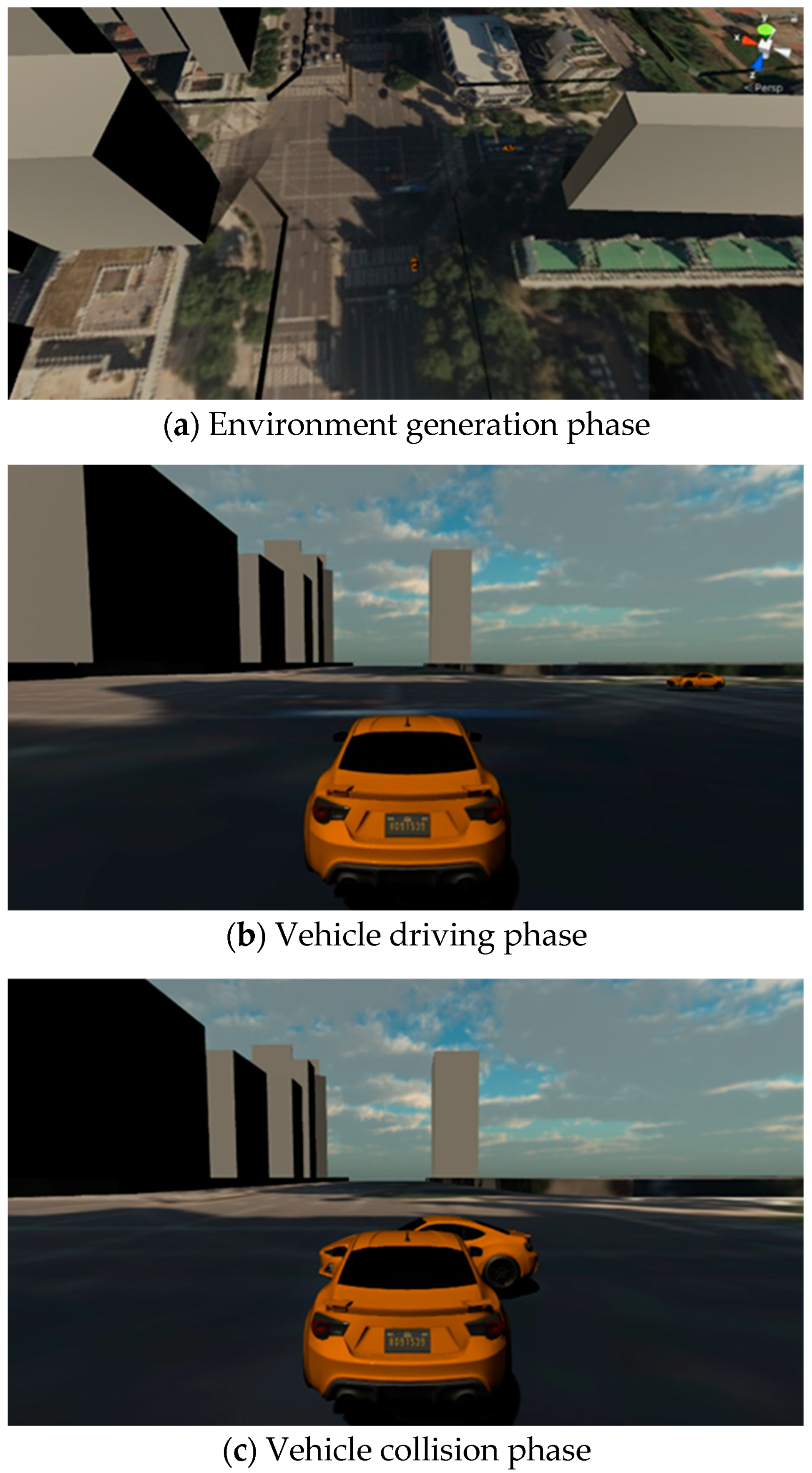
- Animation component: This component parses the JSON files received from the simulation component and creates and executes a 3D model according to the parsed result.
4.2. Detailed Procedure
4.2.1. Model Repository
4.2.2. Simulation Component
4.2.3. Animation Component
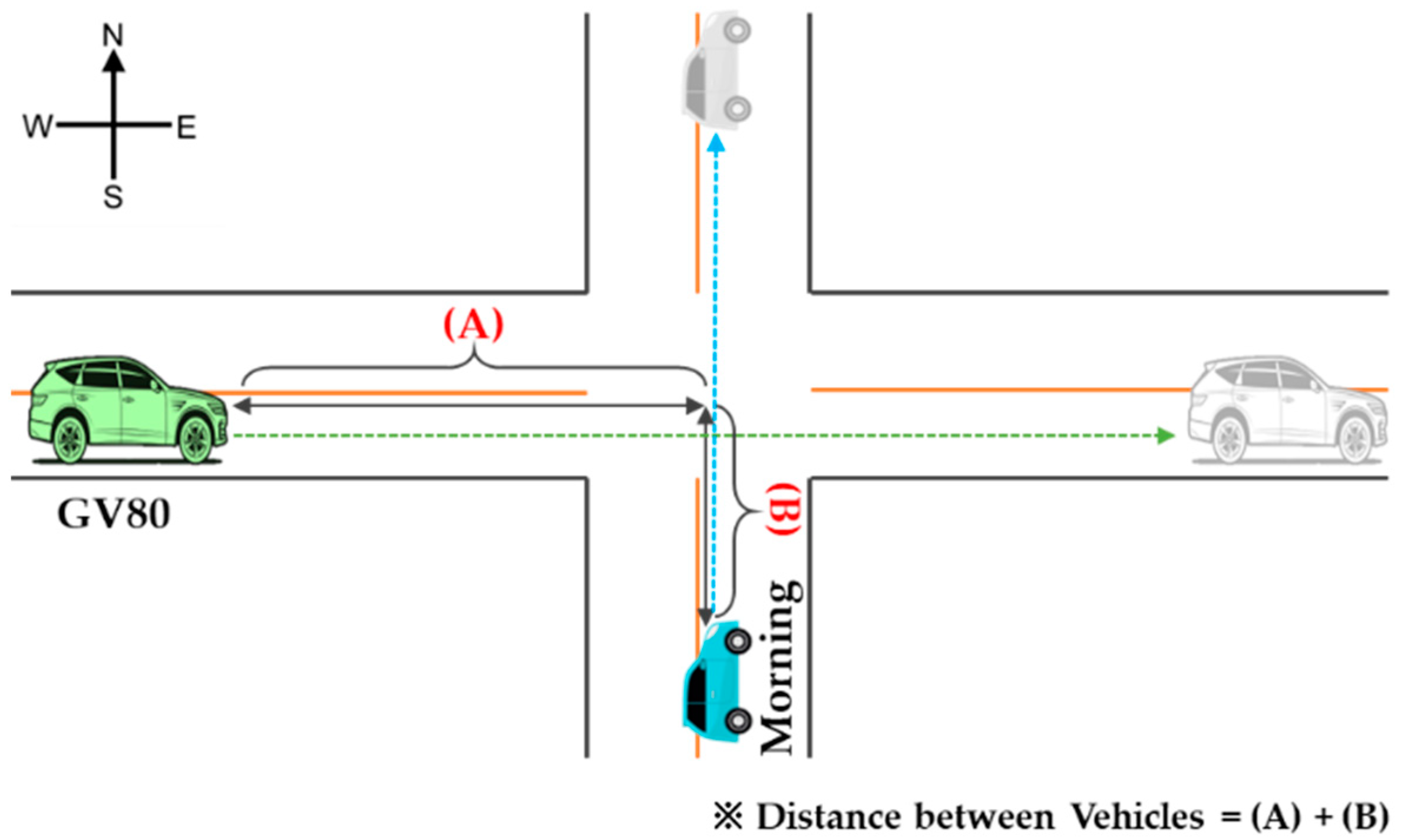
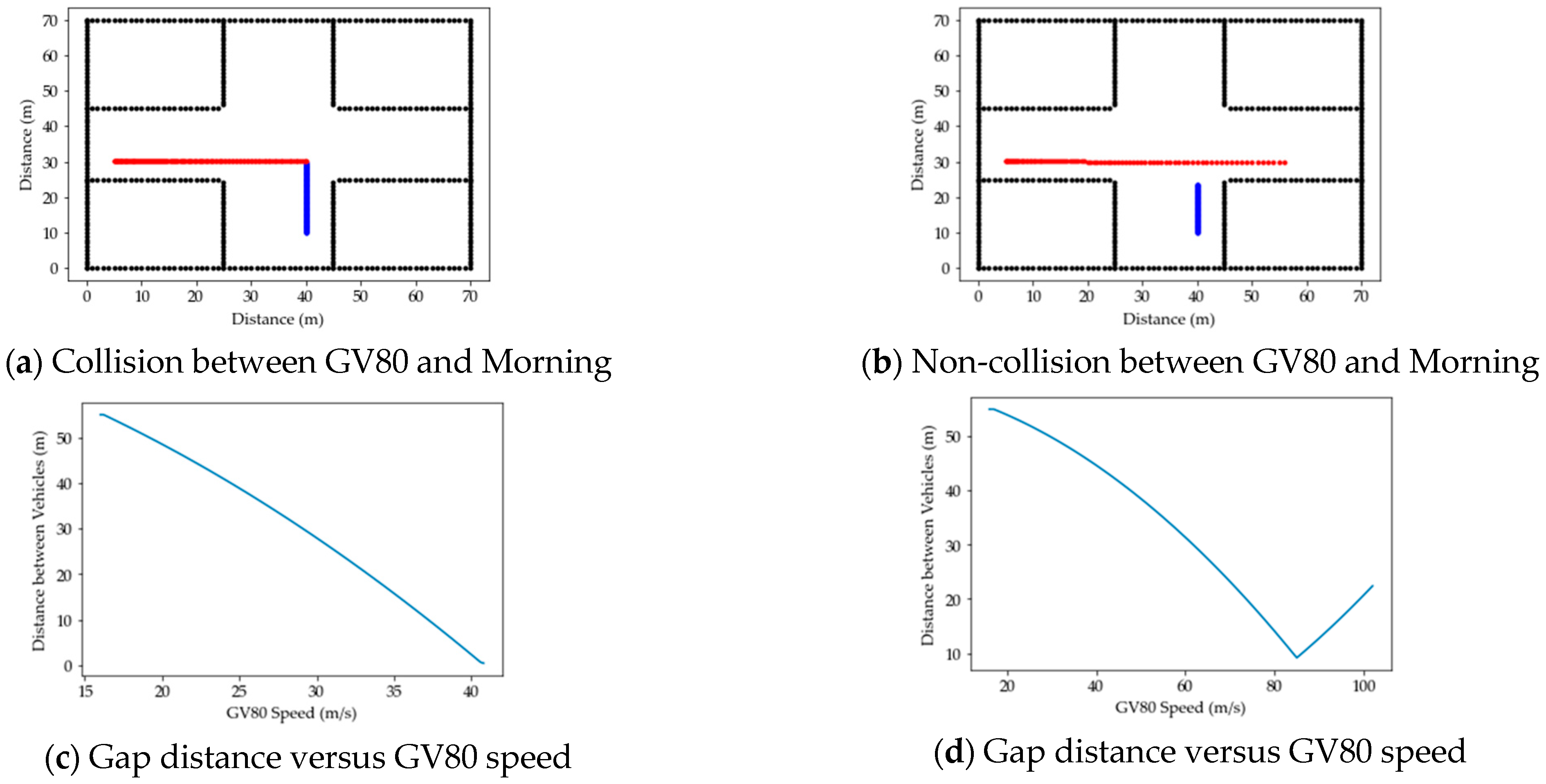
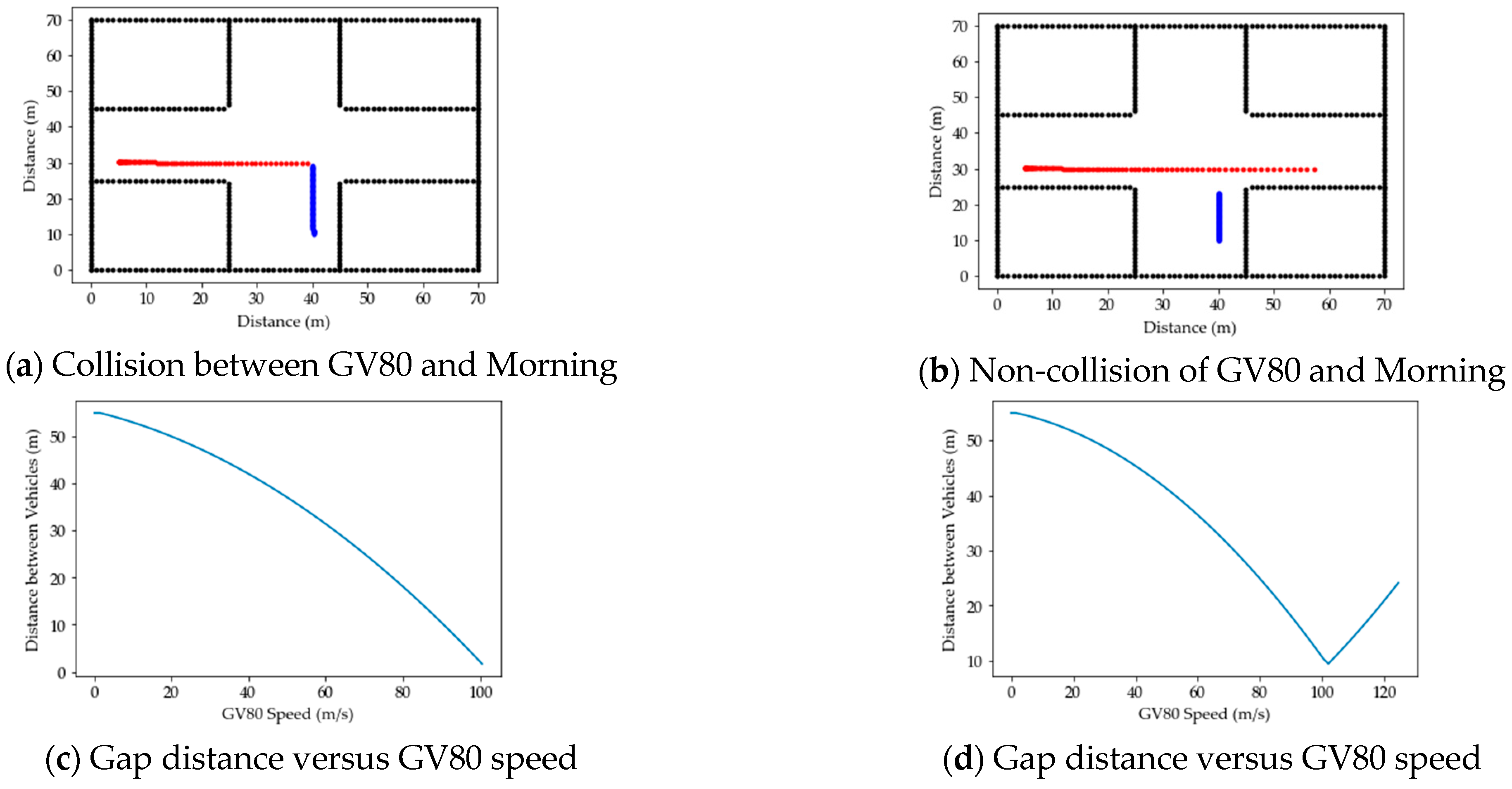
5. Simulation Results
- Simulation Environment 1: Both vehicles have the same speed, but they change in acceleration.
- Simulation Environment 2: The GV80 starts slowly after stopping, and the Morning runs at a constant speed.
6. Conclusions
- Simpy-based simulation for simulating the collision,
- Unity-based animation for representing the collision using the results.
Author Contributions
Funding
Conflicts of Interest
References
- Ibrahim, M.; Rassõlkin, A.; Vaimann, T.; Kallaste, A. Overview on digital twin for autonomous electrical vehicles propulsion drive system. Sustainability 2022, 14, 601. [Google Scholar] [CrossRef]
- Yu, Z.; Khan, S.A.R.; Umar, M. Circular economy practices and industry 4.0 technologies: A strategic move of automobile industry. Bus. Strategy Environ. 2022, 31, 796–809. [Google Scholar] [CrossRef]
- Zhou, S.; Wang, J.; Xu, B. Innovative coupling and coordination: Automobile and digital industries. Technol. Forecast. Soc. Change 2022, 176, 121497. [Google Scholar] [CrossRef]
- Knight, M.R.; Bernard, J. Simulation of Vehicle Collisions in Real Time; Citeseer: University Park, PA, USA, 2002. [Google Scholar]
- Kutela, B.; Das, S.; Dadashova, B. Mining patterns of autonomous vehicle crashes involving vulnerable road users to understand the associated factors. Accid. Anal. Prev. 2022, 165, 106473. [Google Scholar] [CrossRef] [PubMed]
- Sokhan-Sanj, S.; Mackulak, G.T. The value of simulation animation: Discussion of instances where statistical output is insufficient for analysis of system performance. In Proceedings of the 2nd Annual International Conference on Industrial Engineering Applications and Practice, San Diego, CA, USA, 12–15 November 1997; pp. 989–993. [Google Scholar]
- Nevins, M.R.; Macal, C.M.; Love, R.J.; Bragen, M.J. Simulation, animation and visualization of seaport operations. Simulation 1998, 71, 96–106. [Google Scholar] [CrossRef]
- Korkut, E.H.; Surer, E. Visualization in virtual reality: A systematic review. Virtual Real. 2023, 27, 1447–1480. [Google Scholar] [CrossRef]
- Lasseter, J. Principles of traditional animation applied to 3D computer animation. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 35–44. [Google Scholar]
- Kerlow, I.V. The Art of 3D Computer Animation and Effects; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Parent, R. Computer Animation: Algorithms and Techniques; Newnes: Oxford, UK, 2012. [Google Scholar]
- LG_Business_Solutions. Autonomous Driving Simulator. Available online: https://www.svlsimulator.com/ (accessed on 1 June 2023).
- NVIDIA_DRIVE_Sim. NVIDIA DRIVE Constellation. Available online: https://developer.nvidia.com/drive/drive-constellation (accessed on 1 June 2023).
- Morai. Autonomous Vehicle Driving Simulator. Available online: https://ko.morai.ai/ (accessed on 1 June 2023).
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. Airsim: High-fidelity visual and physical simulation for autonomous vehicles. In Field and Service Robotics: Results of the 11th International Conference; Springer: Berlin/Heidelberg, Germany, 2018; pp. 621–635. [Google Scholar]
- Benekohal, R.F.; Treiterer, J. CARSIM: Car-following model for simulation of traffic in normal and stop-and-go conditions. Transp. Res. Rec. 1988, 1194, 99–111. [Google Scholar]
- Matloff, N. Introduction to Discrete-Event Simulation and the Simpy Language; Department of Computer Science, University of California at Davis: Davis, CA, USA, 2008; pp. 1–33. [Google Scholar]
- Almeida, B.; Mordido, A.; Thiemann, P.; Vasconcelos, V.T. Polymorphic lambda calculus with context-free session types. Inf. Comput. 2022, 289, 104948. [Google Scholar] [CrossRef]
- Bierman, G.M. Operational properties of Lily, a polymorphic linear lambda calculus with recursion. Electron. Notes Theor. Comput. Sci. 2000, 41, 9. [Google Scholar] [CrossRef]
- Games, E. Unreal Engine. Available online: https://www.unrealengine.com/ (accessed on 1 June 2023).
- PX4. PX4 Autopilot. Available online: https://px4.io/ (accessed on 1 June 2023).
- AMERICA, H.M. 2021 GENESIS GV80. Available online: https://www.genesis.com/us/en/2021/genesis-gv80.html (accessed on 1 June 2023).
- Research and Business Development Foundation. Development of Experimental Platform for Safe and Fast Verification to Avoid Secondary Collisions Vehicle Safety in Multiple Vehicle; Construction & Transportation Technology Advancement R&D Report, 2018-09-03; Ministry of Land, Infrastructure and Transport: Washington, DC, USA, 2018.
- Hill, D.R. Object-Oriented Analysis and Simulation; Addison-Wesley: Boston, TX, USA, 1996. [Google Scholar]
- Baltes, S.; Ralph, P. Sampling in software engineering research: A critical review and guidelines. Empir. Softw. Eng. 2022, 27, 94. [Google Scholar] [CrossRef]
- Gajananan, K.; Nantes, A.; Miska, M.; Nakasone, A.; Prendinger, H. An experimental space for conducting controlled driving behavior studies based on a multiuser networked 3D virtual environment and the scenario markup language. IEEE Trans. Hum. Mach. Syst. 2013, 43, 345–358. [Google Scholar] [CrossRef]
- Turner, C.J.; Hutabarat, W.; Oyekan, J.; Tiwari, A. Discrete event simulation and virtual reality use in industry: New opportunities and future trends. IEEE Trans. Hum. Mach. Syst. 2016, 46, 882–894. [Google Scholar] [CrossRef]
- Prendinger, H.; Jain, R.; Imbert, T.; Oliveira, J.; Li, R.; Madruga, M. Evaluation of 2D and 3D interest management techniques in the distributed virtual environment DiVE. Virtual Real. 2018, 22, 263–280. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | LG AD Simulator | NVIDIA Drive Sim | Morai Simulator | Microsoft AirSim | Carsim |
|---|---|---|---|---|---|
| Feature | Autonomous driving | Multi-sensor based self-driving virtual testbed | Simulation of a realistic vehicle driving environment | Data generation related to autonomous vehicles | Accurate, detailed, efficient methods for simulating vehicles |
| Open Source | Yes | No | No | Yes | No |
| 3D Map | Support | Support | Support | Support | Support |
| HIL | Support | Support | Unidentified | Support | Unidentified |
| SIL | Support | Support | Unidentified | Support | Unidentified |
| VIL | Support | Unidentified | Support | Unidentified | Unidentified |
| Country | Republic of Korea | USA | Republic of Korea | USA | USA |
|
|
| Parameters | Genesis GV80 | KIA Morning |
|---|---|---|
| Empty Wight | 2100 kg | 910 kg |
| Length | 4945 mm | 3595 mm |
| Width | 1975 mm | 1595 mm |
| Engine | 2.5 Gasoline Turbo | 1.0 Gasoline |
| Tire | 22 inches | 14 inches |
| Vehicle | Type (m/s) | Result Order | ||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| GV80 | Speed | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 |
| Acceleration | 0 | 0.01 | 0.001 | 0.002 | 0 | |
| Morning | Speed | 0.16 | 0.16 | 0.16 | 0.16 | 0.16 |
| Acceleration | 0 | 0 | 0 | 0 | 0.01 | |
| Collision status | False | False | False | True | False | |
| Vehicle | Type (m/s) | Result Order | ||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| GV80 | Speed | 0.16 | 0.22 | 0.16 | 0.22 | 0.16 |
| Acceleration | 0 | 0 | 0 | 0 | 0 | |
| Morning | Speed | 0.16 | 0.16 | 0.11 | 0.11 | 0 |
| Acceleration | 0.001 | 0.001 | 0.001 | 0.001 | 0.008 | |
| Collision status | False | False | False | False | True | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, S.M.; Park, J.; Sagong, C.; Lee, Y.; Kim, H.-J. A Vehicle Crash Simulator Using Digital Twin Technology for Synthesizing Simulation and Graphical Models. Vehicles 2023, 5, 1046-1059. https://doi.org/10.3390/vehicles5030057
Nam SM, Park J, Sagong C, Lee Y, Kim H-J. A Vehicle Crash Simulator Using Digital Twin Technology for Synthesizing Simulation and Graphical Models. Vehicles. 2023; 5(3):1046-1059. https://doi.org/10.3390/vehicles5030057
Chicago/Turabian StyleNam, Su Man, Jieun Park, Chaeyeon Sagong, Yujin Lee, and Hyung-Jong Kim. 2023. "A Vehicle Crash Simulator Using Digital Twin Technology for Synthesizing Simulation and Graphical Models" Vehicles 5, no. 3: 1046-1059. https://doi.org/10.3390/vehicles5030057
APA StyleNam, S. M., Park, J., Sagong, C., Lee, Y., & Kim, H. -J. (2023). A Vehicle Crash Simulator Using Digital Twin Technology for Synthesizing Simulation and Graphical Models. Vehicles, 5(3), 1046-1059. https://doi.org/10.3390/vehicles5030057