1. Introduction
Tires are the main components in vehicles as they have a significant effect on the vehicle’s performance such as ride, traction, braking, and handling. Moreover, tires’ rolling resistance directly affects the fuel consumption of the vehicle. Therefore, there is an essential need to examine and predict tire performance under various operating conditions. In recent years, several researchers predicted tire behavior with different tools including numerical analysis and empirical analytical simulations in addition to the experimental tests. Experimental tests such as drum-cleat tests or coast-down tests are very time-consuming and costly. As a result, many researchers put a significant effort into modeling prediction of the tire performance with numerical approaches that are an effective source of information for the tire manufacturers and the automotive sectors. The finite element method is one of the most useful and powerful tools that is being used for designing and analyzing tires. The first application of the finite element method in tire industries returned to 1970 decay by the introduction of tire science technology journals.
The first effort to model two-dimensional tires referred to the 1970 decay and the first footprint modeling refers to 1980. In 1973, Zorowski et al. [
1] was one of the pioneers who presented the idea of the use of finite element methods to study the dynamic behavior of tires. He proposed applying finite element techniques for tire modeling and mathematical prediction. Moreover, he used a classical membrane theory for designing tire plies. The results of his study can be used in the future for tire design and applying constraints on carcass shape. In 1974, Ridha et al. [
2] presented a linear finite element model for the deformation of tires due to shrinkage. This analysis was performed using composite theory for modeling the material properties and structural behavior. The analysis is performed to fit the mold shape into the final shape of the tire. The shrink forces were extracted, and the results showed a good correlation between calculated and experimental displacement.
In 1978, Kennedy et al. [
3] performed a simulation on the analysis of the radial automobile tire. The tire was undergoing steady-state rotation using a finite element method. A quasi-static method was implemented to solve the static analysis of the rotating tire. One of the advantages of this method was shortening the solution time for the tire simulation. The tire was modeled two-dimensionally with an elastic structure, and then a full three-dimensional tire was generated. The tire model was subjected to ground contact, and a point load excitation was applied to the tire. The result showed a good agreement with the experimental variables including damping and the effect of inertia components. It should be noted that to modify the damping, a two-element Kelvin–Voight viscoelastic material model was adopted for the simulation.
In 2000, Shiraishi et al. [
4] presented an explicit finite element method to model the dynamically rolling tire. The internal construction of the tire and the complicated pattern shape of the tire were modeled with full details and geometry. One major drawback of this work was the higher simulation time in contrast to the other techniques, although it was acceptable for practical tire development. The output results were stated under various rolling conditions, and they were verified with experimental data that revealed enough correlation. As a result, the finite element techniques using explicit methods were considered a useful procedure to model the dynamically rolling tires. In 2000, Kabe et al. [
5] presented implicit and explicit simulations using finite element techniques to model a passenger car tire. The cornering simulation was also performed to extract the lateral force of the tire under the state stage. The results were validated using the experimental data from an MTS Flat-Test Tire Test. The predicted cornering results in two different methods including implicit FEA and explicit FEA were compared to the experimental ones and they showed a good correlation between the simulation and the real cornering data from the MTS Flat-Test Tire Test.
In 2006, Ghoreishy et al. [
6] presented a finite element model of the steady-state rolling tire using the commercial computer software Abaqus Version 6.4, 2003. An axisymmetric model was imported as a tire section and then generated a three-dimensional tire. Finally, the distribution pressure and shear stress field steady state rolling were compared to the experimental measurement and showed a good correlation with each other. In the same year, Chae [
7] performed a frequency analysis and static validation for a real truck tire, 295/75R22.5. The sidewall damping was computed for various tire operating conditions including various load and inflation pressure.
In 2009, Krmela, J. [
8] presented a computational method for passenger car radial tire modeling. The tire model was generated using finite element techniques via ANSYS software. The strain-stress analyses were carried on for the proposed FE tire model. All the tire layers have been modeled according to the tire complexity. Tire composite structures including textile cords, steel cords, and elastomer parts of tire carcass were simulated.
In 2016, Lardner et al. [
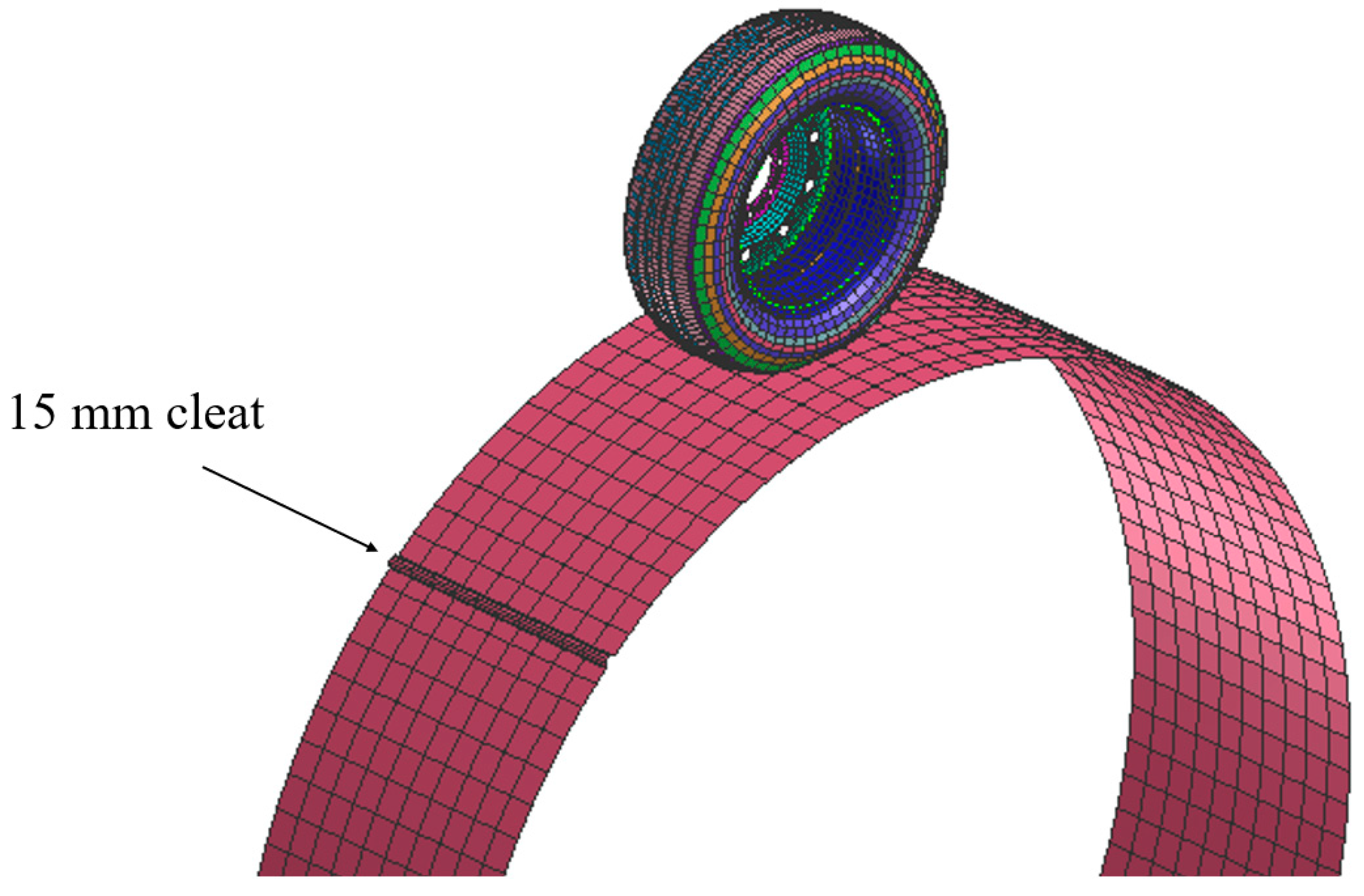
9] analyzed a 445/50R22.5 truck tire in Pam-Crash software. The research aimed to determine the effect of various operating conditions including different tire speeds, inflation pressure, and load on the first frequency mode. The simulation was carried out using a drum-cleat test. The results were validated using the Pam-Crash fast Fourier transform (FFT) algorithm to perform a frequency analysis. FFT is a transformation of forces in the time domain with the help of an optimized discrete Fourier transform (DFT) by decreasing the several orders and reducing the complexion [
10,
11]. Therefore, a frequency analysis converts the amplitude of tire reaction forces from the time domain to the frequency domain.
In 2017, Krmela [
12] presented computational modeling for car tires according to the material identifications. Moreover, experimental testing including dynamic tests of tires and low cyclic loading tests of composites were performed in this work. In addition, tire casings and material parameters identification were included. Furthermore, several analyses including, modal analysis, pressure footprint analyses, and the static test for the prediction of tire radial stiffness were carried out. The tire computational models were generated by implementing hyperelastic and orthotropic material models instead of composite elements of a tire casing. The material characteristics were obtained from the experimental tests.
In 2018, Rafei et al. [
13] presented an advanced finite element model for a rolling tire at different tire–road friction conditions to model rolling tires under cornering simulation. The friction was modeled using a thermos-mechanical procedure by developing two Abaqus subroutines. The simulation results were validated using output data from a flat-track machine test. The FEM results revealed that the complexity of the material models and friction have a negligible effect on the lateral force in contrast to aligning moment and pressure distribution on the footprint. In 2018, El-Sayegh et al. [
14] performed a cornering analysis of a wide base truck tire 445/50R22.5 over dry and wet surfaces in a virtual software package Pam-Crash. The cornering stiffness and lateral force in addition to the rolling resistance coefficient were computed for this tire.
In 2020, Krmela, J. [
15] published a book on the computational and experimental modeling of tires. Moreover, the theory for tire modeling was explained. In this textbook, various tests on tires including static and dynamic testing machines have been described completely. In the same year, El-Sayegh et al. [
16] modeled a truck tire size 315/80R22.5 traveling on the gravel soil using finite element analysis. Soli texture was modeled using the Smooth-Particles Hydrodynamics (SPH) method in the Pam-Crash software. In this research, tire–road characteristics were captured using four tire set-ups including (a) a free-rolling steering tire, (b and c) driven tires, and (d) a free-rolling push tire. Tire mechanics’ properties were validated using the experimental tests in Göteborg, Sweden. In 2020, Ali, S.N. SN Ali [
17] studied the rolling resistance prediction of the passenger car radial tire using finite element procedures. For this purpose, firstly the deformation of the tire under certain vertical loading was calculated. Moreover, the total required force for deformation was assumed as energy loss in the tire’s rolling resistance. In addition, the finite element simulation results revealed that the lowest rolling resistance is caused by the largest crown angle.
In 2021, Gao et al. [
18] performed a study on the tire deformation characteristic under high-speed rolling conditions. The study utilized a three-component tire assembly to model the belt, sidewall, and rim. It was found that the influence of vertical load has a more substantial effect than the tire pressure on rolling deformation. In the same year, Phromjan et al. [
19] developed a solid tire model for finite element analysis of compressive loading. The study examined three layers of natural rubber compounds using stress-strain analysis, and an Ogden model was fitted. It was concluded that the footprint characteristics increase with the compression load; however, the contact pressure was not affected.
In 2022, Király [
20] modeled the tire-pavement interaction for a radial truck tire using finite element techniques via ABAQUS software. For this purpose, a complex rubber tire model consisting of a large number of elements was generated, and then the tire model was meshed. The contact stress analysis was performed for the FE tire model. The results revealed a good capability for the prediction of the diagonal tire behavior according to the contact areas and stresses.
Recently, in 2023, Lu D et al. [
21] presented a detailed tire finite element modeling in addition to the material identification. The viscoelastic properties of tire compounds were taken into account by performing experimental testing via a cyclic tensile test. In addition, the effect of various material modeling on the tire dynamic behavior was observed. The finite element results showed a good agreement compared with the experimental results for the longitudinal force, lateral force, and correction moment. In the same year, Fathi et al. [
22] performed a finite element analysis of a Regional Haul Steer II (RHS), 315/80 R22.5 truck tire. The tire interacted on a dry, hard terrain. The cornering characteristics of the tire, including cornering stiffness and lateral force, in addition to the self-aligning moment, were computed under various operating conditions.
This research provides insights into the static and dynamic behavior of tire models at different operating conditions. This paper uses finite element analysis to model and analyze a passenger all-season car tire with four grooves, size 235/55R19. This particular tire size is widely used for both passenger cars and light trucks and is popular in North America. For all solid elements, the hyperelastic behavior of tire rubber compounds is defined using the Mooney–Rivlin material model. Steel is used to model the beads as beam elements and aluminum alloy is used to model the tire rim as a rigid body. Several simulations are used to validate the tire model in both the static and dynamic domains and the results are compared to published measured data. The research work presented in this paper contributes to a better understanding of tire characteristics and the utilization of hyperelastic material to model rubber compounds, especially at high speeds where most of the current models are lacking.
2. Finite Element Tire Modeling
In this research, a four-groove passenger car radial (PCR) tire size 235/55R19 from the Continental Cross Contact LX Sport model is simulated using finite element analysis (FEA). The full finite element tire model is generated using a commercial finite element software named Pam-Crash. Numerical calibration for the tire geometry and size including rim diameter, tire width, tire height, aspect ratio, and weight of the tire and rim are carried out according to the continental tire manufactured data catalog [
23], as shown in
Table 1. It should be noted that the simulated diameter and weight are reported after the tire is inflated and before it is loaded. During the initial design of the CAD model, these dimensions may vary slightly as the effect of pressure should be taken into consideration.
According to the information stated in the tire catalog, the maximum load for Continental Cross Contact LX Sport 235/55R19 is 8 kN (1819 lbs.) with a maximum inflation pressure of 252 kPa (51 psi). The nominal values for load and inflation pressure are selected as 5 kN and 228 kPa based on the common vehicle’s gross weight and the tire manufacturer’s recommendation, respectively.
Furthermore, in addition to the geometric properties of the tire, tire mechanics and dynamic characteristics such as vertical stiffness, cornering stiffness, and rolling resistance coefficient, in addition to critical vertical frequency, are simulated using finite element analysis. The nominal inflation pressure of 228 kPa and a nominal vertical load of 5 kN are applied to the center of the tire-wheel assembly to calibrate the tire with tire characteristics according to the tire manufacturer data catalog [
23]. Moreover, optimizing the diameter of the beads was performed to achieve a reasonable tire weight, which is 14.81 kg. It should be noted that the gravity was defined for the center of the tire by using a curve function with the value of 9.81 m/s
2 in the Pam-Crash acceleration.
2.1. Meshing Techniques
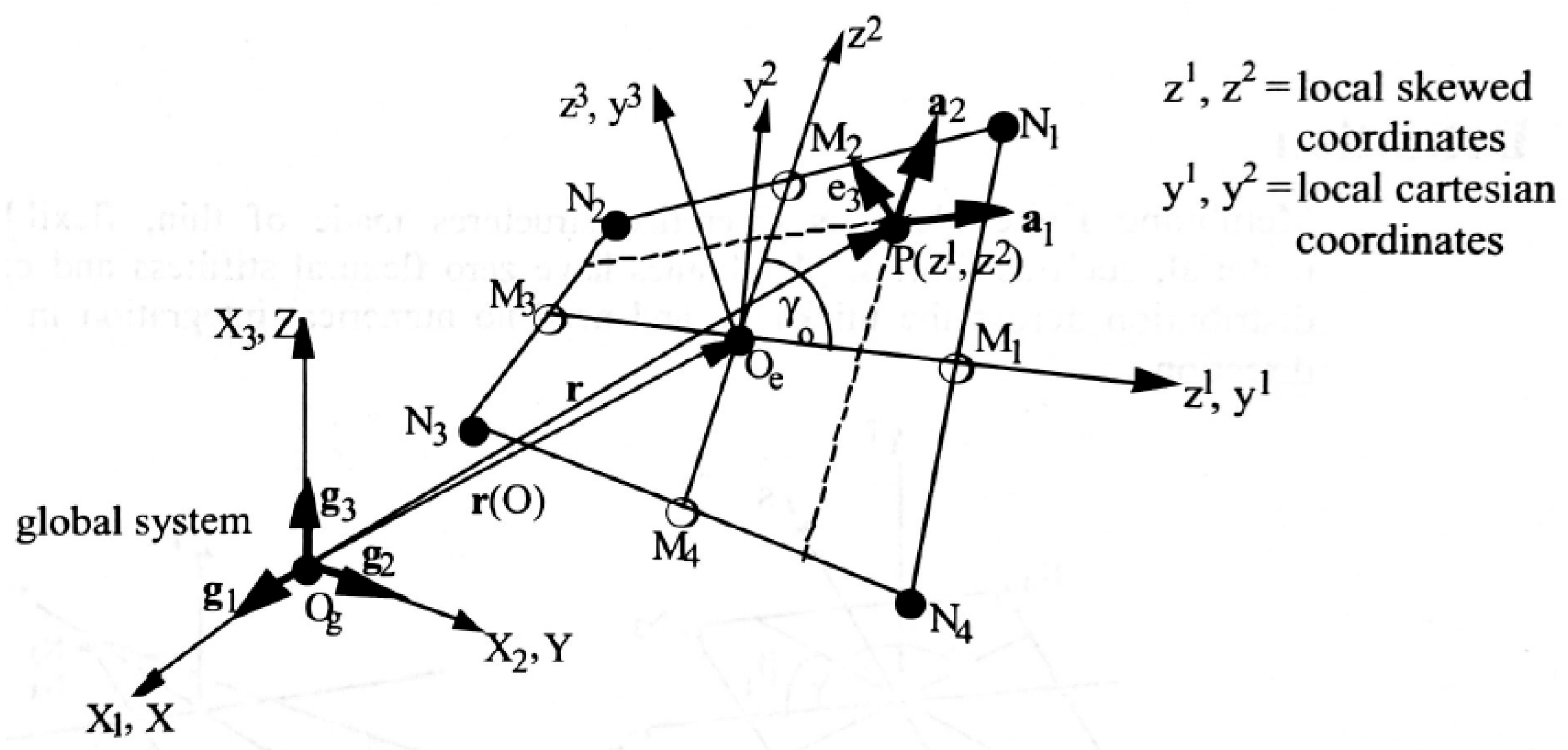
The total tire–road finite element (FE) model in this research consists of 8940 elements and 9617 nodes. All the rubber-like structural components in the tire were meshed using 3D elements including 3240 solid elements (H). The reinforcement cords and rebar layers were modeled using 1D elements including beam elements (BM), 2D elements including thin shell elements (S), and membrane elements (MB). As shown in
Figure 1, MB in PAM-SCL is modeled as a two-dimensional element embedded in the three-dimensional space like a 3D solid element (which are tread top and tread base compound and cap ply in this research). They are defined to be formed in a wrapped mid-surface and isoparametric continua [
24]. For this purpose, 120 BM were selected to simulate the embedded bead wires in the tire rim area. To model the steel belts, cap plies, and carcass cords, the 3780 S and 1800 MB were chosen.
The reason for implementing MB is that these elements have zero flexural stiffness and contact stress distribution across the thickness. Therefore, it is not required to use integration in the thickness direction [
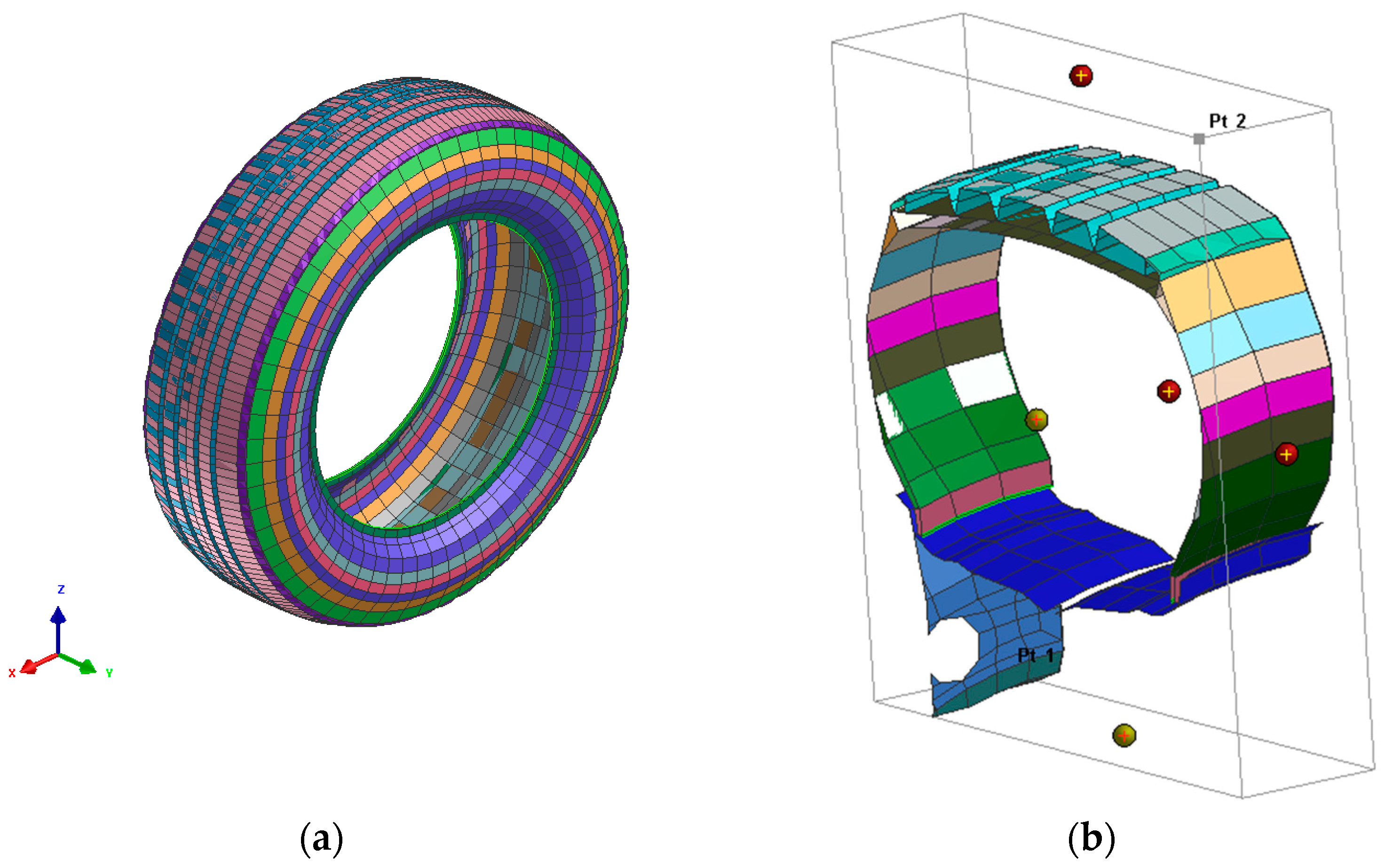
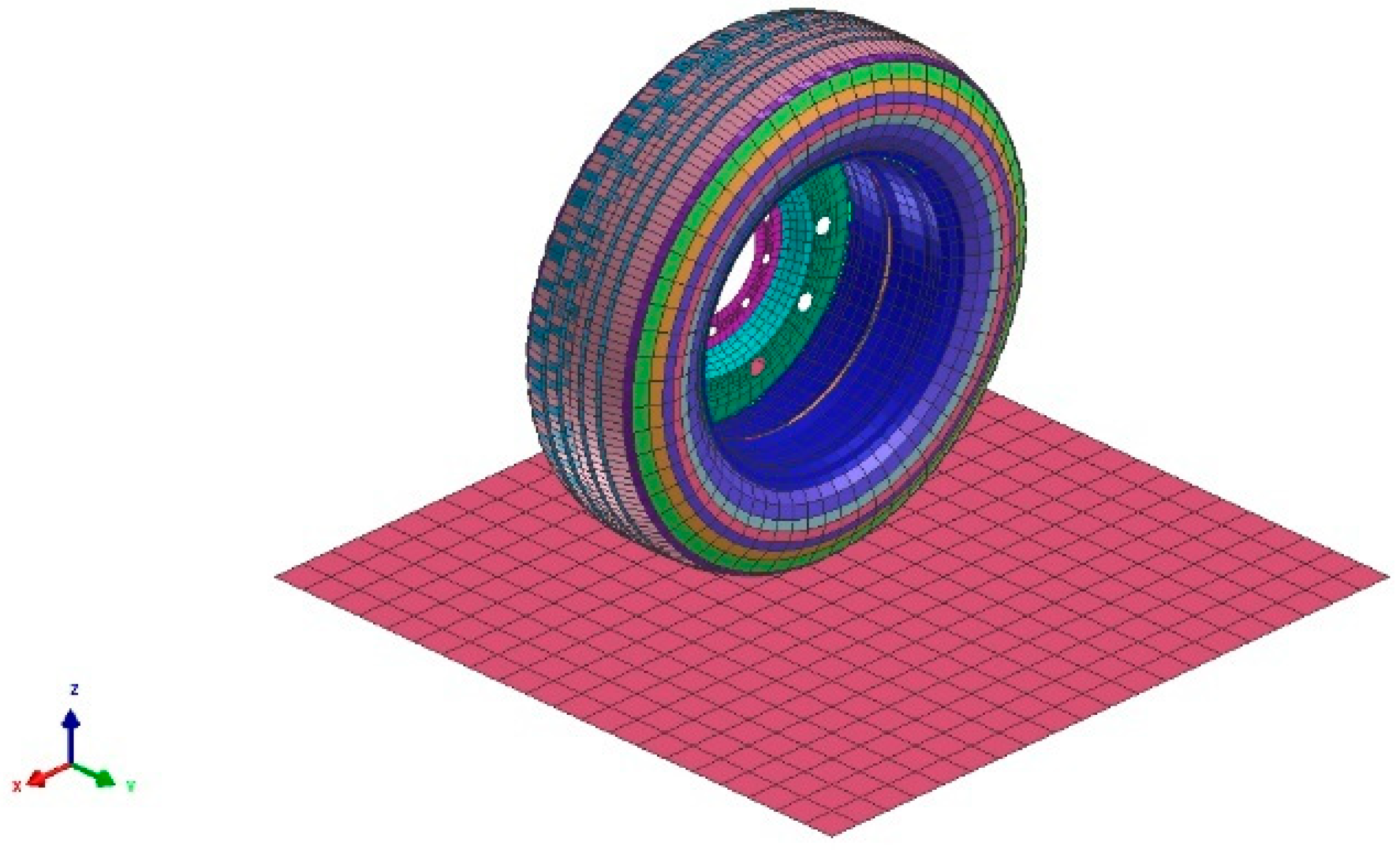
25]. Additionally, the road was modeled with the shell elements. Moreover, by assigning solid mesh to the radial-ply tire layers in addition to the reinforcement cords,
Figure 2a shows the tire meshed model before post-processing.
Figure 2b shows the cross-sectional section of the tire that is rotated 60 equal times in a six-degree increment to obtain the fully rotated tire.
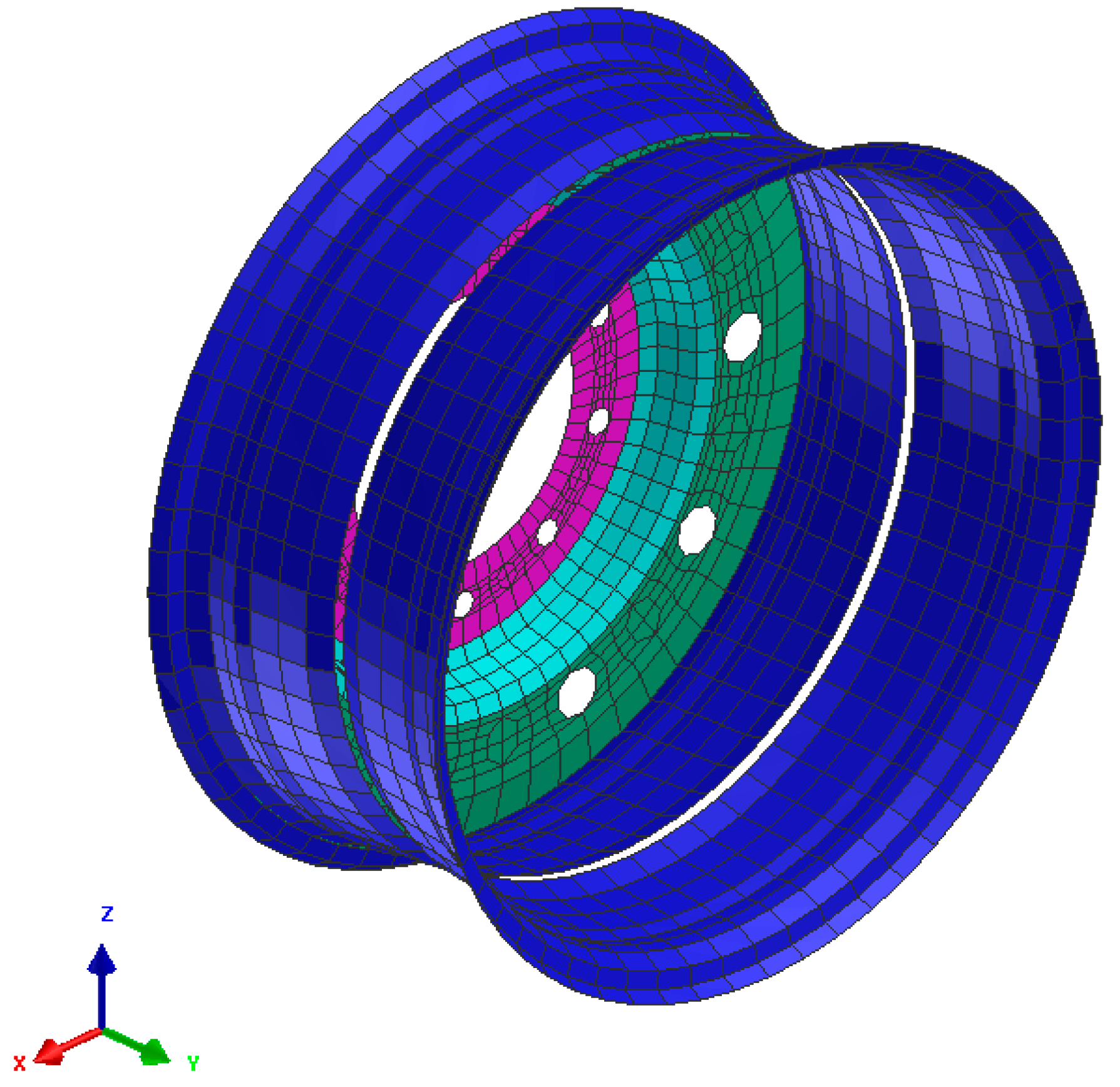
To perform rim mounting, a rigid wheel is selected as shown in
Figure 3. To assemble a tire on the wheel, aluminum alloy was assigned to the wheel and the wheel was defined as a rigid body to reduce the complexity of the simulation. This assumption was considered acceptable as the relative stiffness and mass distribution characteristics of the rim in comparison to other layers of the tire are much higher. In addition, in most on-road applications and especially passenger vehicles, the rim is rigid and does not deflect.
2.2. Tire Material Definition
All tire layers including the tread top, tread base, tread shoulders, belt compounds, cap plies, radial plies, sidewall, inner liner, and bead fillers are modeled separately. Moreover, tire reinforcement rebar cords including steel belts, polyester plies, and steel bead wires are modeled with the linear elastic material models. All these modes are assumed to be homogeneous and isotropic. To define the hyperelastic behavior of the tire compounds, the most common material model used widely in tire industry applications is the Mooney–Rivlin material model for medium deformation. The Mooney–Rivlin material model is the expansion of series function models (SEF) by Rivlin [
26,
27]. Equation (1) is based on first and second strain invariants
, respectively.
where
are the material parameters. The Mooney–Rivlin material model is obtained from Equation (1) when the only parameter materials
and
are retained [
27].
The material parameters for the Mooney–Rivlin hyperelastic model are stated in
Table 2.
and
are the first (loading) and second (loading) Mooney–Rivlin law coefficients, respectively. Further details regarding the material selection and parameter identification can be found in the previous publication [
28].
2.3. Tire–Road Contact Algorithm
In this research, the road is selected as a dry, hard rigid surface. The contact model used is a non-symmetric node-to-segment contact algorithm with an edge treatment [
25]. Non-symmetric contact algorithms consider that the contact behavior may vary depending on which side of the interface a node is located. The “edge treatment” suggests that this algorithm considers the specific characteristics or behavior of edges in the simulation. Edge treatment may involve special considerations for how contact is handled along edges, as opposed to the rest of the surface.
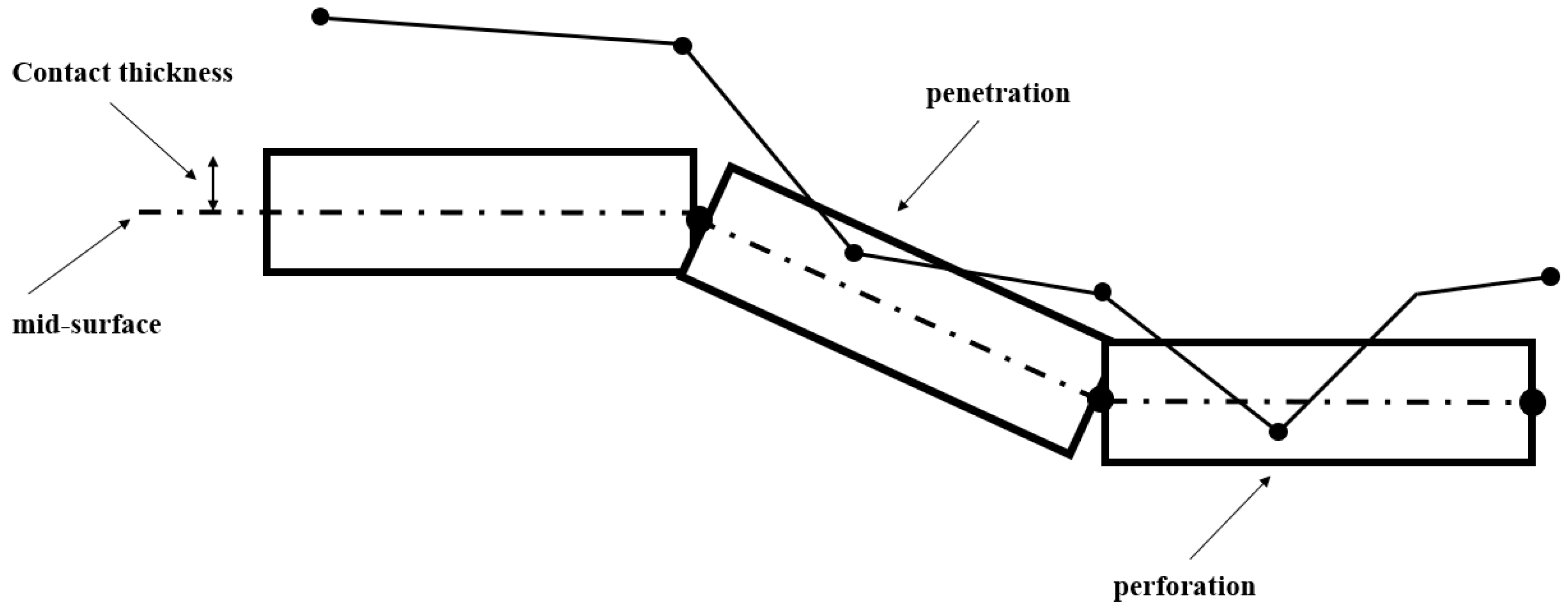
To ensure the quality of the solution, a contact thickness of 5 mm and sliding interface penalties of 0.1 were established for the tread elements at the contact patch and road. This is because the slave nodes in the node-to-surface contact should not pierce the master segments. It should be mentioned that there was no symmetry in this treatment. To simulate the actual interactions between tires and roads, a non-penetration node was established to stop tire nodes from entering the elements of the road surface while the analysis was being conducted. To sufficiently cover the distance covered by the tires during the two-second interval, the surface length varied in length.
In the whole simulation, the contact node-to-segment was used and the road was meshed with the finer mesh instead of coarse elements to remain in contact between the tire contact patch and road node surface while rolling, as shown in
Figure 4.
To determine the tire–road contact interface, the frictional contact with Coulomb’s law was implemented. After a certain point, the bodies of the slave and master no longer adhere to one another. This conditional tangential force,
, is also known as the sliding force and is explained by the following equation:
where
is the sliding friction coefficient representing the frictional properties of the contact interface,
is the normal contact force or pressure, and
is the tangential relative velocity between the contacting surfaces. The tire rolls with respect to the road in a sliding condition according to the Arbitrary Lagrangian–Eulerian (ALE) framework.
In this case, the tire is selected as a slave and the road is selected as the master according to the algorithm.
Figure 5 shows the tire finite element model after appending to the road. To perform the appending tool, a constraint was defined between the tire and the road surface. Considering no penetration from tire contact patch nodes to the road intersections, a 5 mm contact thickness is defined along with implementing Coulomb’s law with a 0.8 friction coefficient for this constraint.
5. Conclusions
In this paper, modeling and validation of a four-groove passenger car radial tire size 235/55R19 was performed using several numerical analyses via finite element methods. The tire was modeled using several layers to represent the tread, under tread, sidewall, belt, beads, and rim. The materials were selected based on tire rubber compound literature, and the tire weight was calibrated against tire-provided data. The tire was then validated in static and dynamic domains against manufacturer data.
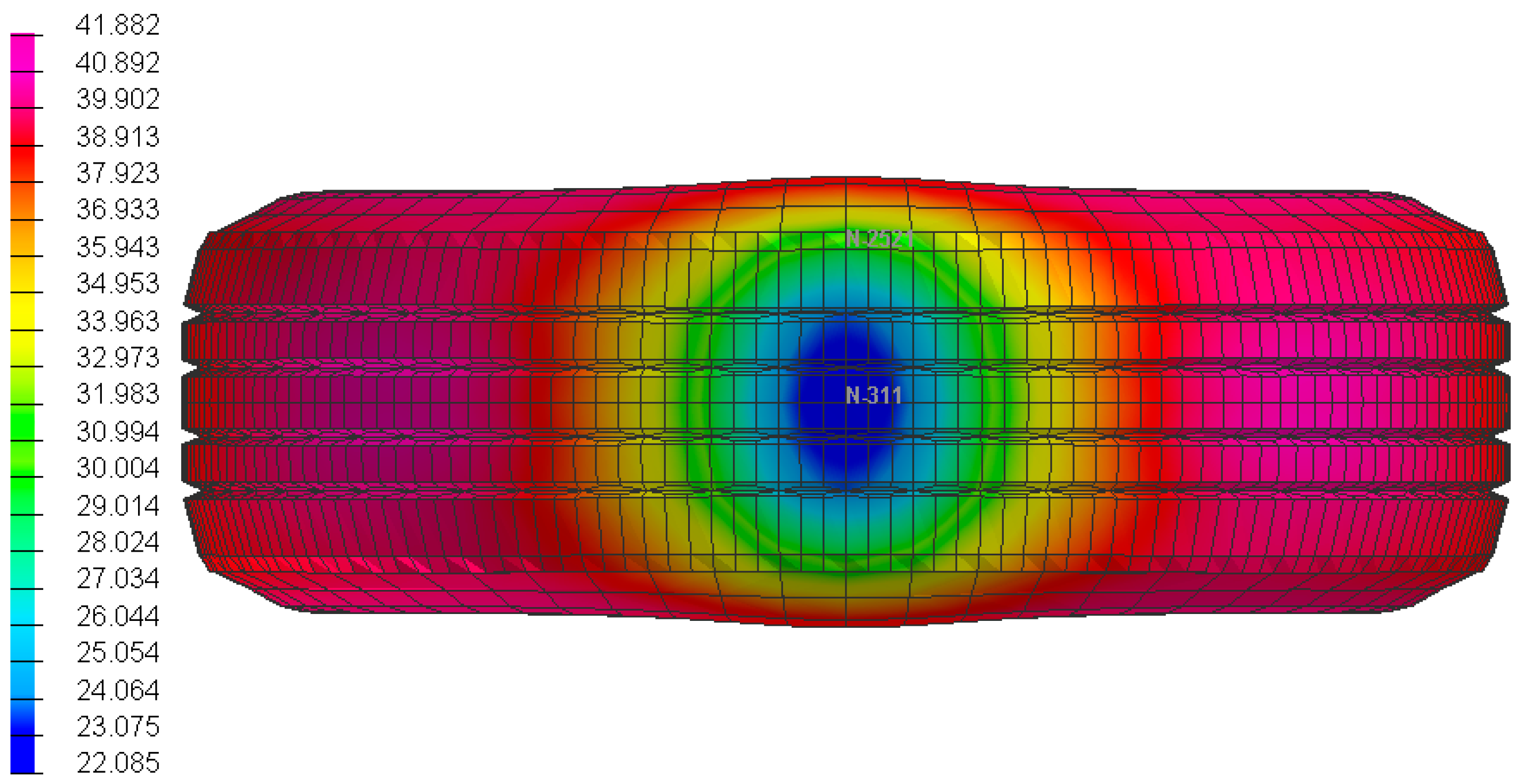
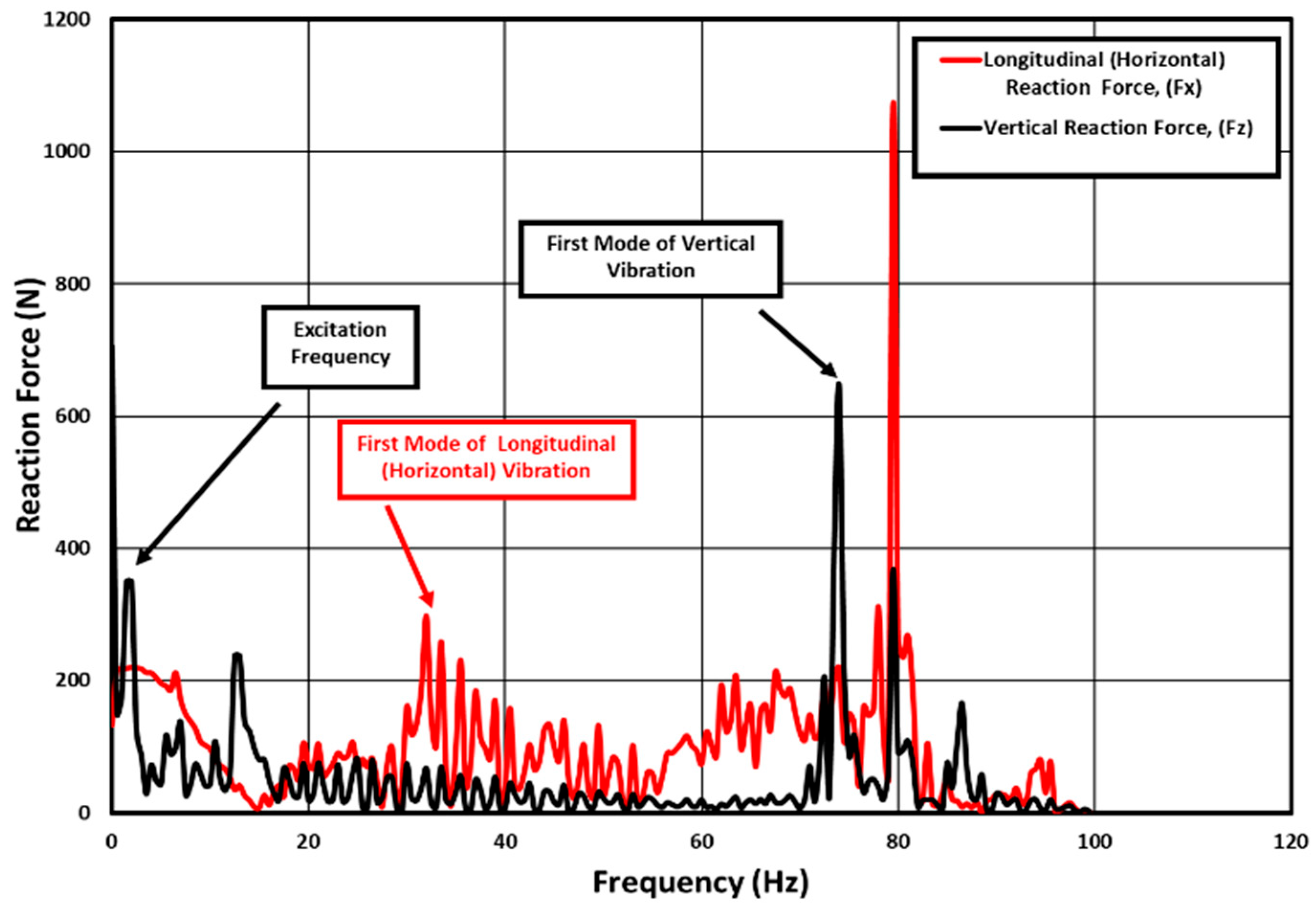
Based on the findings of this research work, it can be concluded that the increase in inflation pressure results in the reduction of static tire footprint areas. Moreover, the footprint test showed that higher deflection of the tread blocks occurs at a higher vertical load, which resulted in a higher footprint contact area. Therefore, it is recommended to design an optimized tire tread pattern that maintains a stable footprint area under various loading conditions. Furthermore, according to the frequency analysis, it was observed that the vertical first mode of vibration occurred at 74 Hz, while the longitudinal first mode of frequency was 32 Hz, which is in good agreement with previously measured data. In addition, it can be concluded that the sidewall damping coefficient is directly affected by the tire inflation pressure, and increasing inflation pressure dramatically gives rise to the full sidewall damping coefficient. However, the vertical load is less effective for changes in the sidewall damping coefficient.
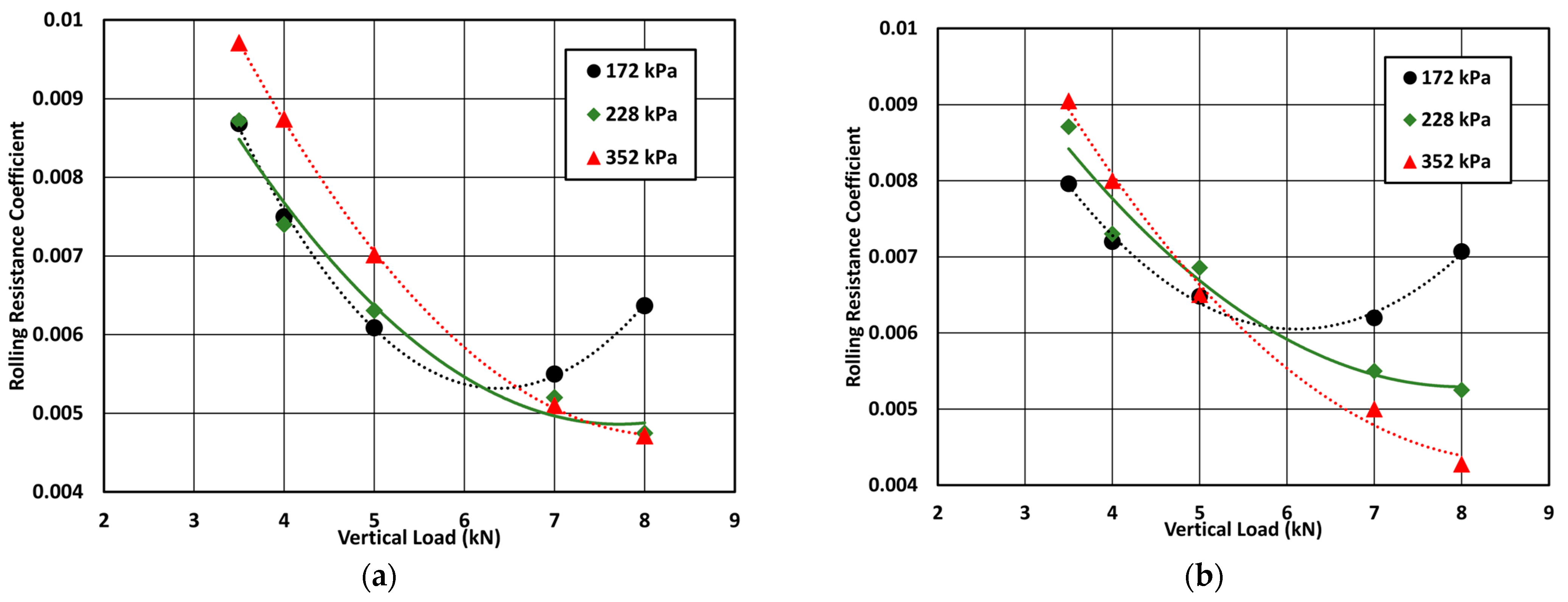
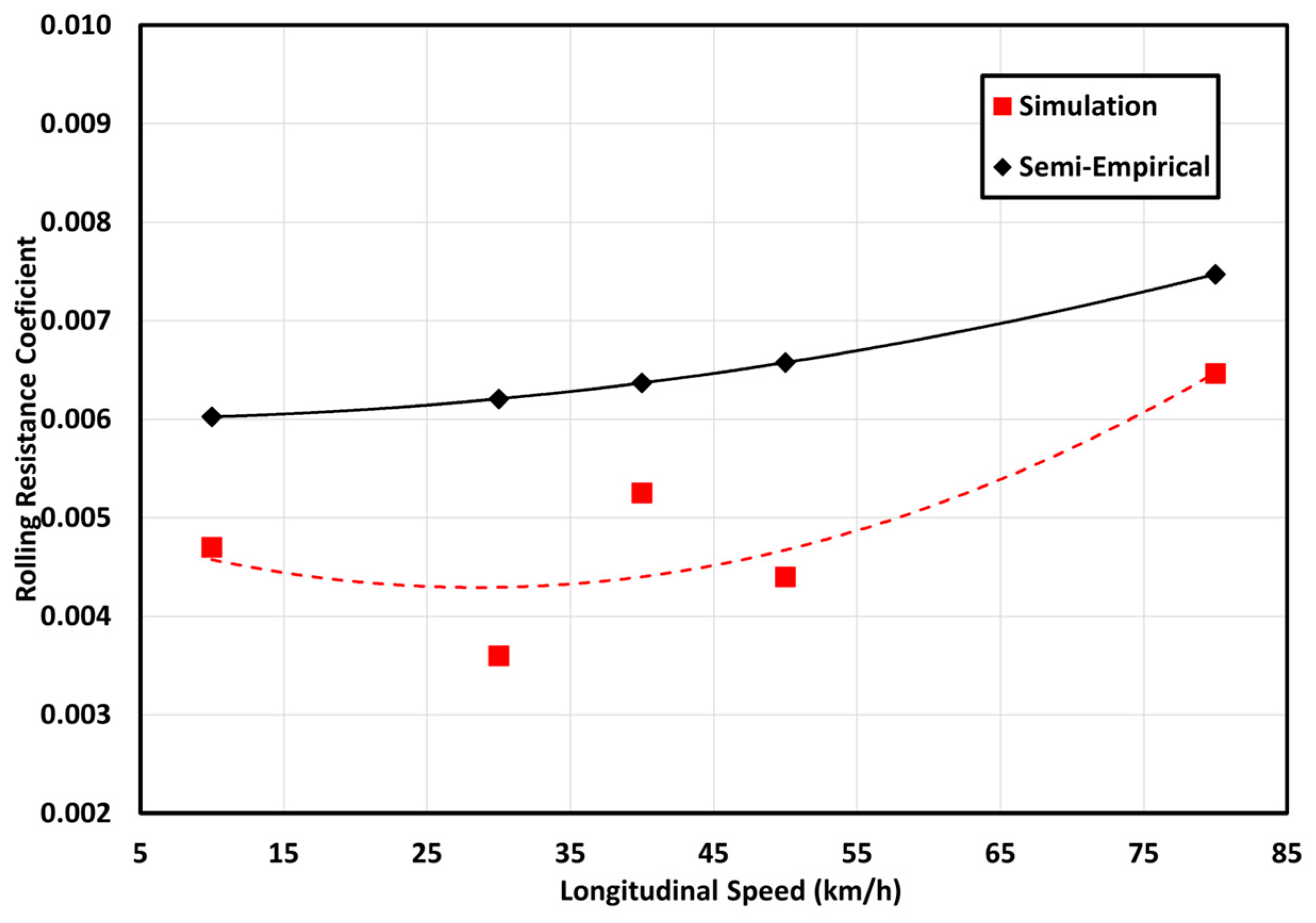
Based on the rolling resistance analysis performed, it was concluded that the vertical load has the largest effect on the rolling resistance coefficient. As the vertical load increases, the rolling resistance coefficient decreases at all ranges of inflation pressures and speeds. Furthermore, as the tire speed increases, the rolling resistance coefficient increases as well; this phenomenon was noticed significantly at higher vertical loads. This research will further continue to investigate the effect of tire rubber compound material on the tire–road interaction characteristics.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}