1. Introduction
Disc brake systems are components of, e.g., trains, cars, trucks, bikes, or e-scooters. Brake systems must ensure the safe stopping of a vehicle at any time. Especially at high speeds, emergency situations instantly occur and result in sudden high loads on vehicles. Brake systems must ensure safe working at high speeds; however, they also have to guarantee reliable working on daily loads, such as in front of traffic lights. Because of this high importance of the systems for the safety of the driver and pedestrians, these systems are specially focused on engineering processes. Therefore, any strange noise, such as squealing or juddering, unsettles drivers, who then mistrust the system. Consequently, they return the entire vehicle to the dealer, who has to fix the issue. The driver is dissatisfied, the dealer has many costs, and the engineering company must provide a solution. Hence, the engineering company has a great interest in the early validation of the product properties in terms of brake systems.
The topic of brake squealing is addressed in different research areas, such as technical engineering and physics or chemistry, because different subsystems on different scales influence its occurrence. Whereas physicists and chemists often take a close look at the friction interface and its properties, engineers focus on the entire brake systems and its implementation in the surrounding assembly in a car or a bike. The engineering process requires one to combine the views of different departments to consider influences from different scales. Hereby, the analysis of the friction interface is done with a micro scale focus and the assembly of the brake system requires a macro scale focus.
A comprehensive overview about brake squealing is given by Kinkaid et al. [
1]. The authors present a detailed explanation of the complex brake system and the arising noises and vibrations. Further, they show that this topic is investigated with physical experiments and computations. Other references, which follow the approach of combining physical experiments and virtual computations, are from Cantoni et al. [
2] and Papinniemi et al. [
3]. In contrast to the split between experiments and computations, Oberst and Lai [
4] distribute the brake squeal investigations to models on different scales. Thereby, pin-on-disc or beam-on-disc experiments are predominantly referred to on the micro scale, because the friction interface is focused on, whereas the model of a laboratory brake system is referred to on the macro scale, since macroscopic geometries are used.
Besides the investigation type and scope, the parts themselves are closely analyzed. The brake pad usually consists of many different materials with different deformation properties or different surface structures. This results in complex friction and wear properties, because the influence of a single ingredient cannot be clearly determined. Eriksson et al. [
5] and Eriksson and Jacobson [
6] show surface formations on a micro scale due to different wear rates of the brake pad ingredients. Plateaus of more wear resistant ingredients determine the friction behavior. They conclude that, with many small plateaus, a brake increasingly tends toward squealing [
5]. Österle and Urban [
7] present an even deeper surface analysis of brake pads. They conducted TEM-studies and EDX spectroscopy, which show the third bodies formation during contact interaction. Different analyses illustrate that these third bodies are a relevant element in pad–disc contact because they enable a steady coefficient of friction [
8,
9,
10].
Besides physical analysis, computations are conducted for contact investigations. Minimal models, which consist of bodies, springs, dampers, and at least one contact, enable engineers and researchers to gain a basic understanding of the excitation mechanisms. Wagner et al. [
11] present different minimal models for the investigation of excitation mechanisms. They argue that an instability of the friction force can induce vibrations. Different minimal models, with at least two degrees of freedom, are summarized and a new approach with a wobbling disc and two-point contacts is introduced. For the application of minimal models, Lyu et al. [
12] present a minimal model and a method for the parameter determination. However, the model is on a macro scale and does not include distributed coefficients of friction or micro scale roughness, but does include constant values for the coefficient of friction. Furthermore, to increase the validation capabilities of minimal models, the combined use of a minimal model and an FE model is a suitable approach, as Úradníček et al. [
13] have shown. Their investigation comprises a minimal model, an FE model and experimental tests for analyzing the influence of the material damping to the stability behavior of a brake.
FE models are another computational method for the investigation of brake squealing. They often include the real geometries, which are exported from the ideal CAD geometry. Therefore, these models take acceleration into account and allow precise deformation and modal analysis computations. Kim et al. [
14] virtually disassemble a brake system and determine the influence of each component to the squeal behavior by assuming a constant coefficient of friction on which the system might squeal. Abu Bakar et al. [
15] and Belhocine and Ghazaly [
16] model an entire disc brake system and show the influence of wear [
15] and the Young’s modulus [
16] to squeal generation. Wenzhu et al. [
17] model a brake system with an FE model and analyze the influence of the coefficient of friction, the rotation speed, the brake pressure and the rotor stiffness on the tendency of instability. A similar approach with a rotating disc is presented by Kang [
18]. The methodology allows one to compute the stability with a fixed rotation angle; it thereby shows that the eigenvalues change with varying rotation angles. Even though Simone et al. [
19] model the contact with various cylinders, each contact uses a constant coefficient of friction. Because of this, the model is not capable of depicting distributed coefficients of friction.
Especially with FE simulations, the amount of data that is generated is enormous; the interpretation is therefore often done graphically. For overcoming these barriers, Stender et al. [
20] use neural networks for the analysis of system stability, arising frequencies and their cross dependencies. This data-driven approach is regarded as useful; however, since the frequencies are system dependent, more research is necessary for reliable results.
Besides discrete FE models, continuous models are used for modelling brake systems. Graf and Ostermeyer [
21] depict the surface structure of a brake disc as additional masses on an ideal surface. The distribution of the masses represents wear plateaus (cf. [
5,
6]). The model shows that vibration excitation is not just dependent on the ingredients, but also on the third body formation in the contact interface. Another continuous approach by Hetzler and Willner [
22] compares three different worn brake pads. They highlight that the microscopic contact properties have a significant influence on the squeal behavior.
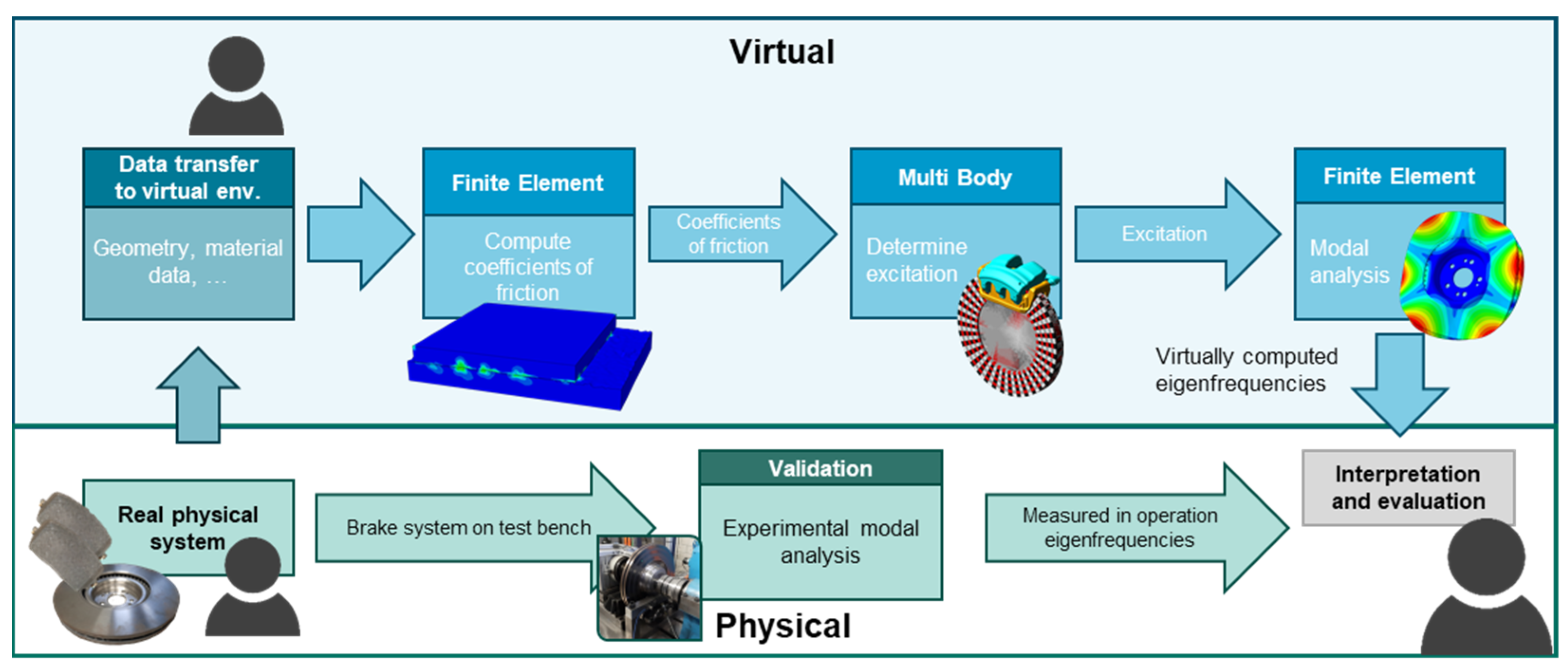
In the presented literature, squealing brake systems are analyzed on the one side physically and on the other side virtually. This split of the methods allows one to conduct individual research. However, since the literature shows that there are different influences from different scales and since different scales require different techniques, a cross-scale approach is a suitable next step for research projects. Therefore, this work aims to develop an approach for coupling different methods and different scales in one engineering method.
The coupling approach mainly addresses product developers, which face scale crossing challenges, such as brake development. Computer simulations allow an isolated investigation of the parameters on each scale. However, the final product is regarded on a macro scale and the transfer and implementation of the behavior, which is determined on lower scales, must be coupled to the macro scale. Since simulation models are always an abstraction of the real system, a physical prototype and physical experiments are mandatory for the validation.
4. Discussion
The previous sections present the results of the simulations and experiments. The simulations are conducted stepwise, and the final results are the eigenfrequencies of the loaded brake system. The conducted physical experiments show the difficult process of remodeling real system behavior on a test bench in a laboratory. However, the results of the modal analysis show that brake squealing can be modelled with modal analysis, but the approach presented here offers potential for further research and adaptions.
In the assembly of the FE friction model, the material data for the cast iron brake disc has been implemented as a common stress–strain curve. However, the material model and the material data for the brake pad have been quite challenging. No standards are available for measuring brake pad material, nor for transferring this to finite elements’ material behavior. The mixture of different ingredients of the brake pad material is often a secret of the manufacturer and generally not published. Hence, this parameter must be carefully taken into account in further simulations.
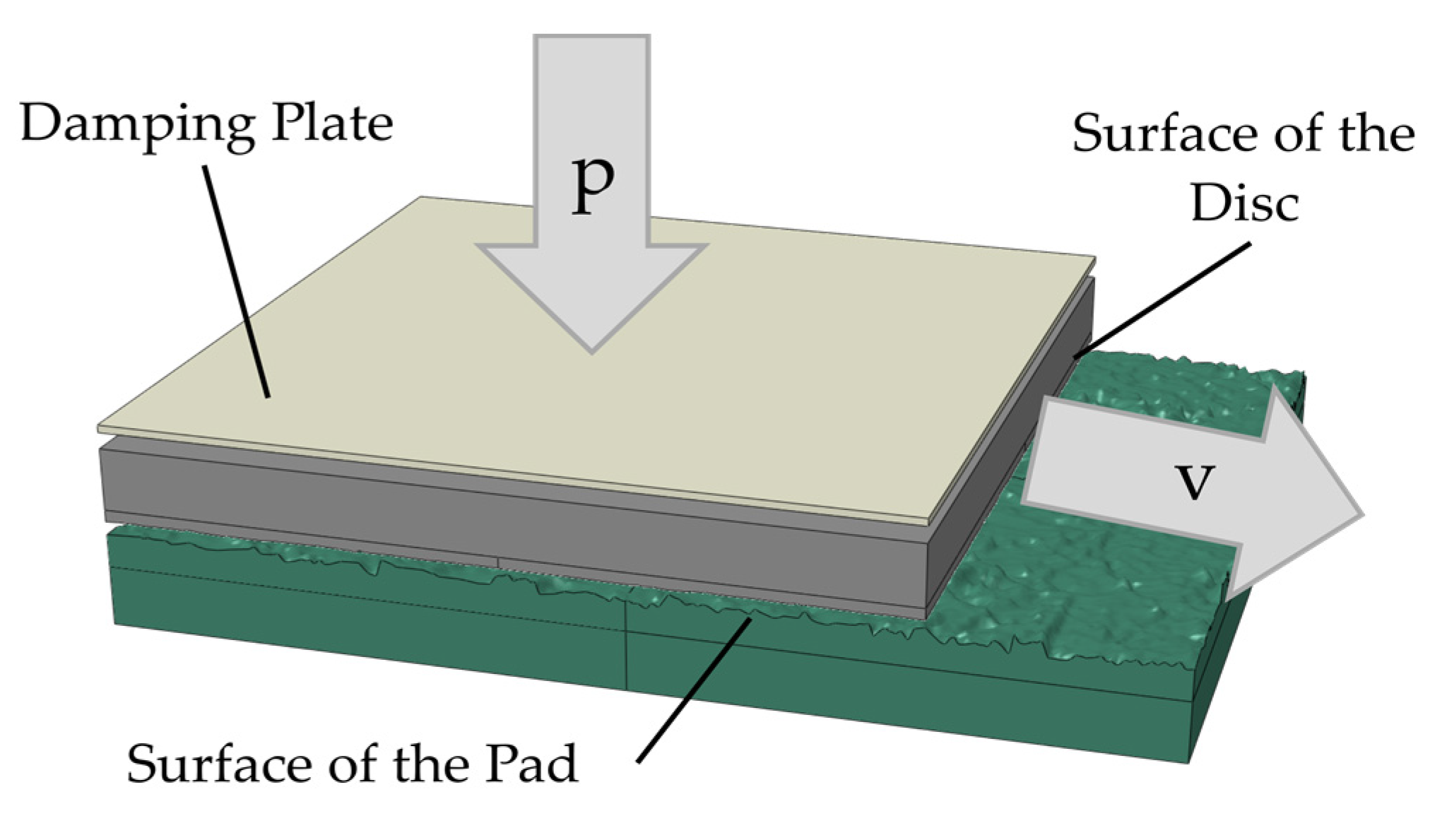
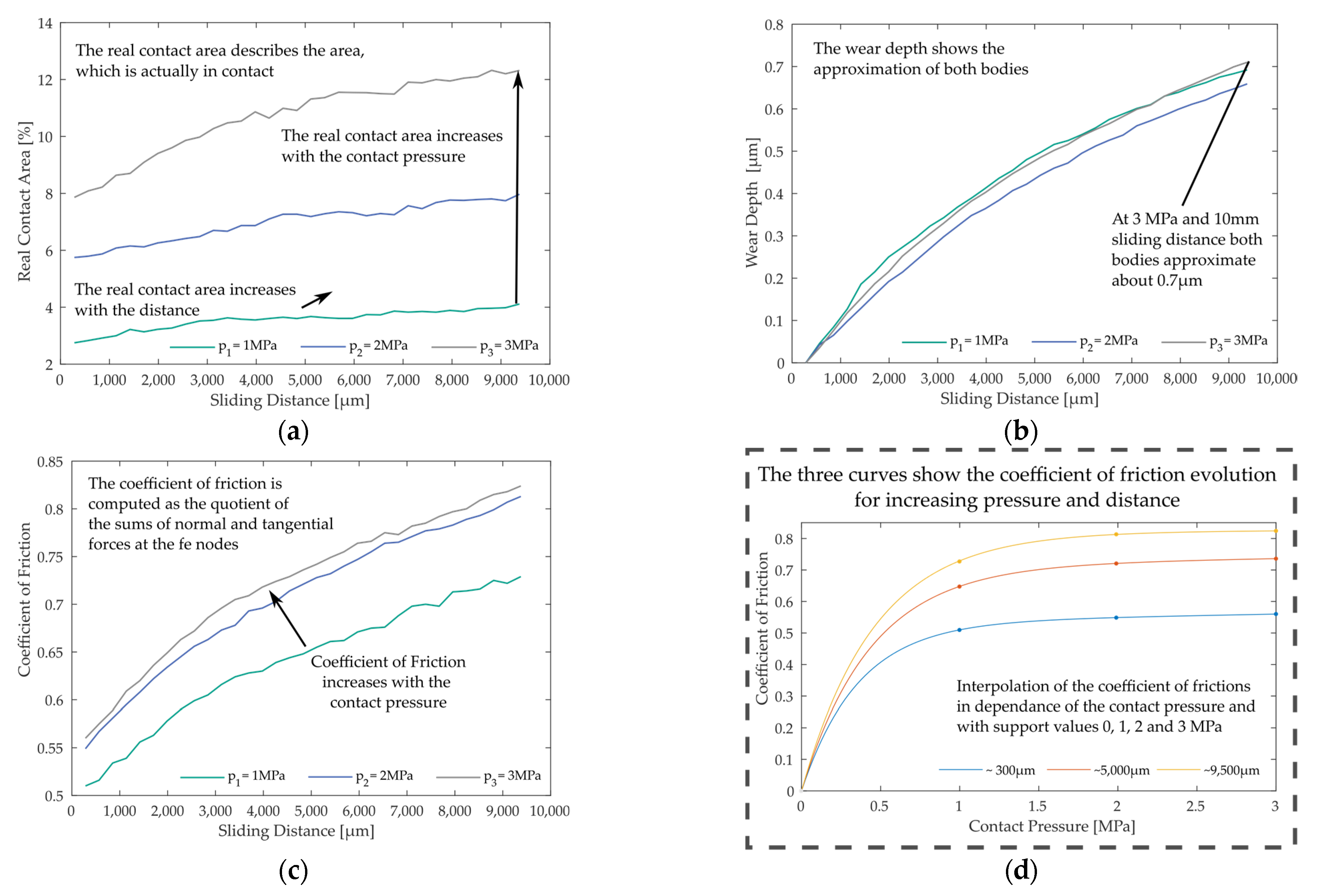
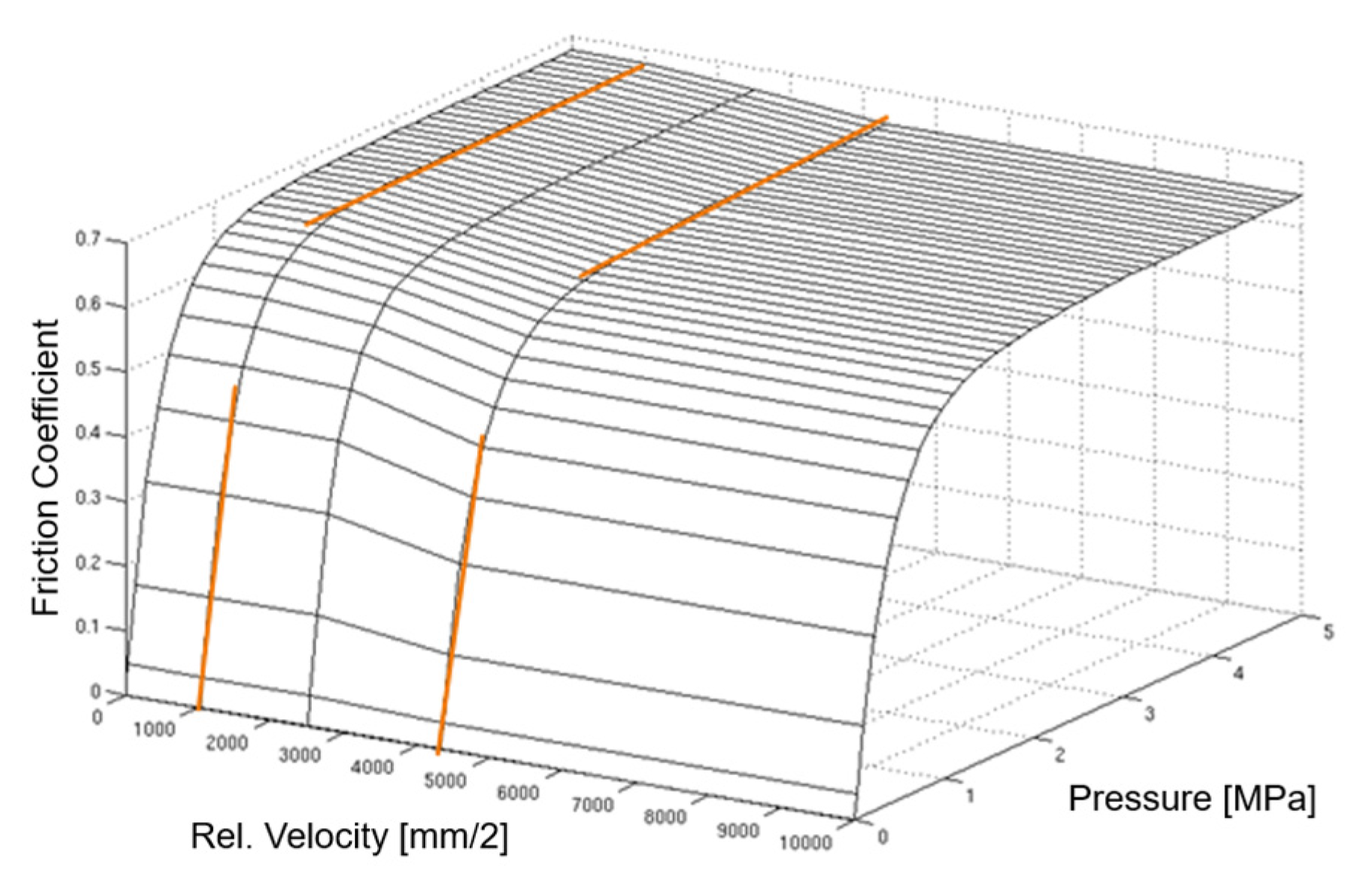
The coefficient of friction as a function of velocity and normal force is computed with the FE friction model. The computation comprises a shear stress limit as friction condition, which predominantly determines the occurring shear stresses. The resulting coefficient of friction lies between 0.4 and 0.6, which is in the upper range of friction for disc brake systems known from the literature. Since the coefficient of friction comprises the constant normal and the shear stress dependent tangential forces, the resulting value is strongly influenced by the shear stress limit. Computations with the same model and a lower shear stress limit follow in a lower coefficient of friction.
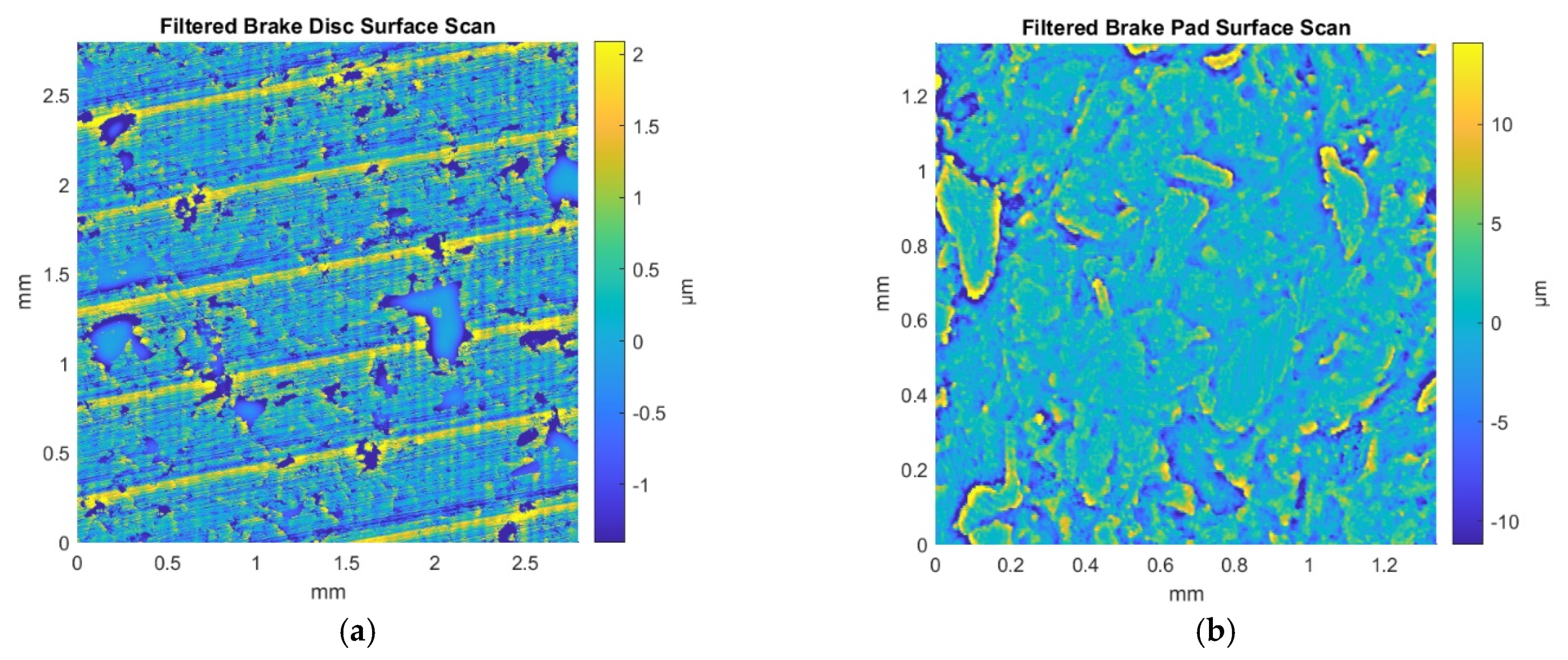
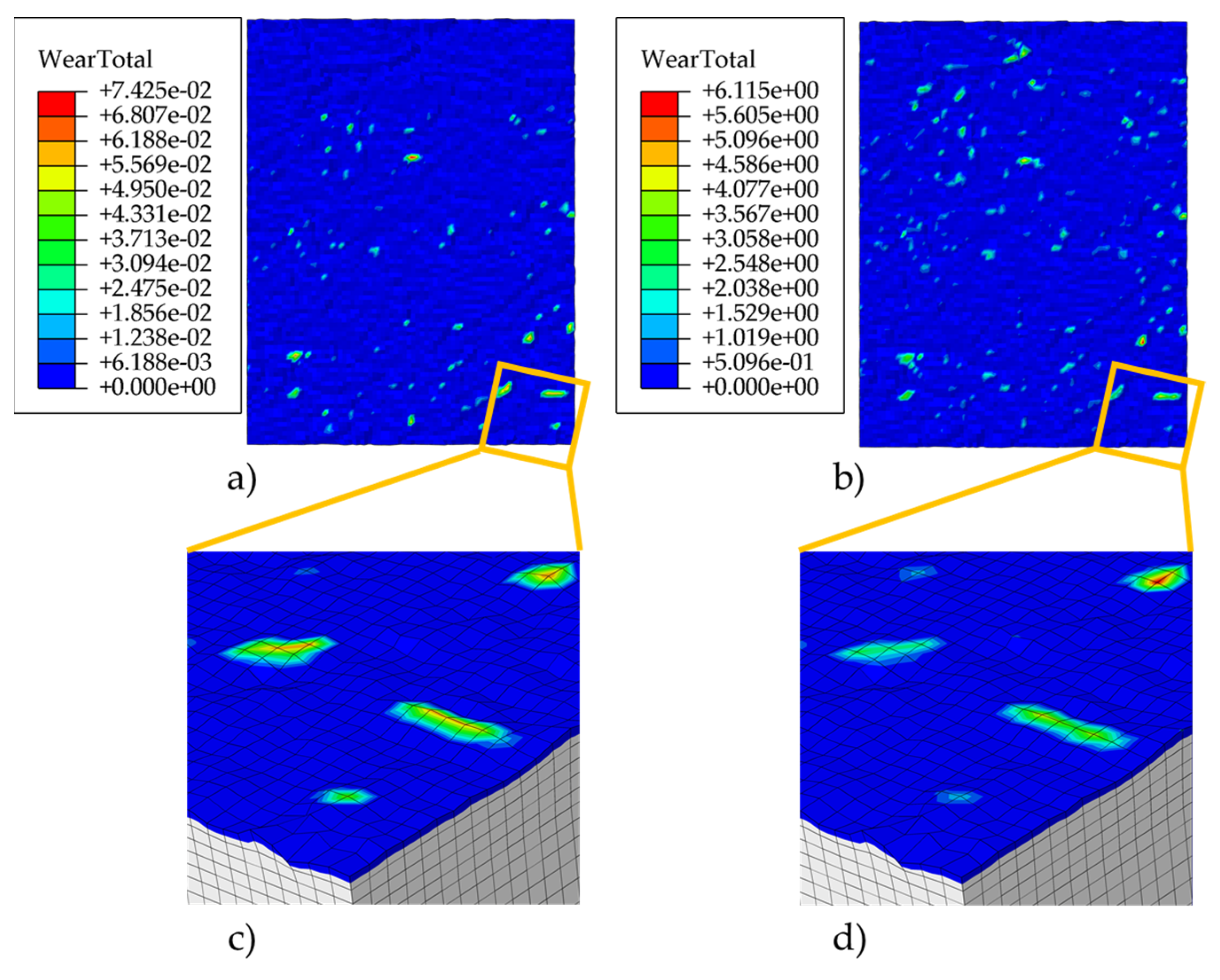
Besides the computation of the coefficient of friction, the FE model depicts the wear evolution by shifting the surface nodes. The distance by which a node is shifted (wear distance) is hereby computed with Archard’s wear law and uses the contact pressure, the wear coefficient, and the shifted distance. Heavily loaded nodes are strongly shifted whereas low loaded nodes are only slightly shifted. This continuous change of the surface topography results in new contact spots throughout the entire simulation and to the flattening of the surface. The results show that low wear appears during the simulation and that the wear is clearly dependent to the applied normal force (contact pressure). In further research, the evolution of the change of the surface topography can be assessed by, e.g., the roughness values or power spectrums.
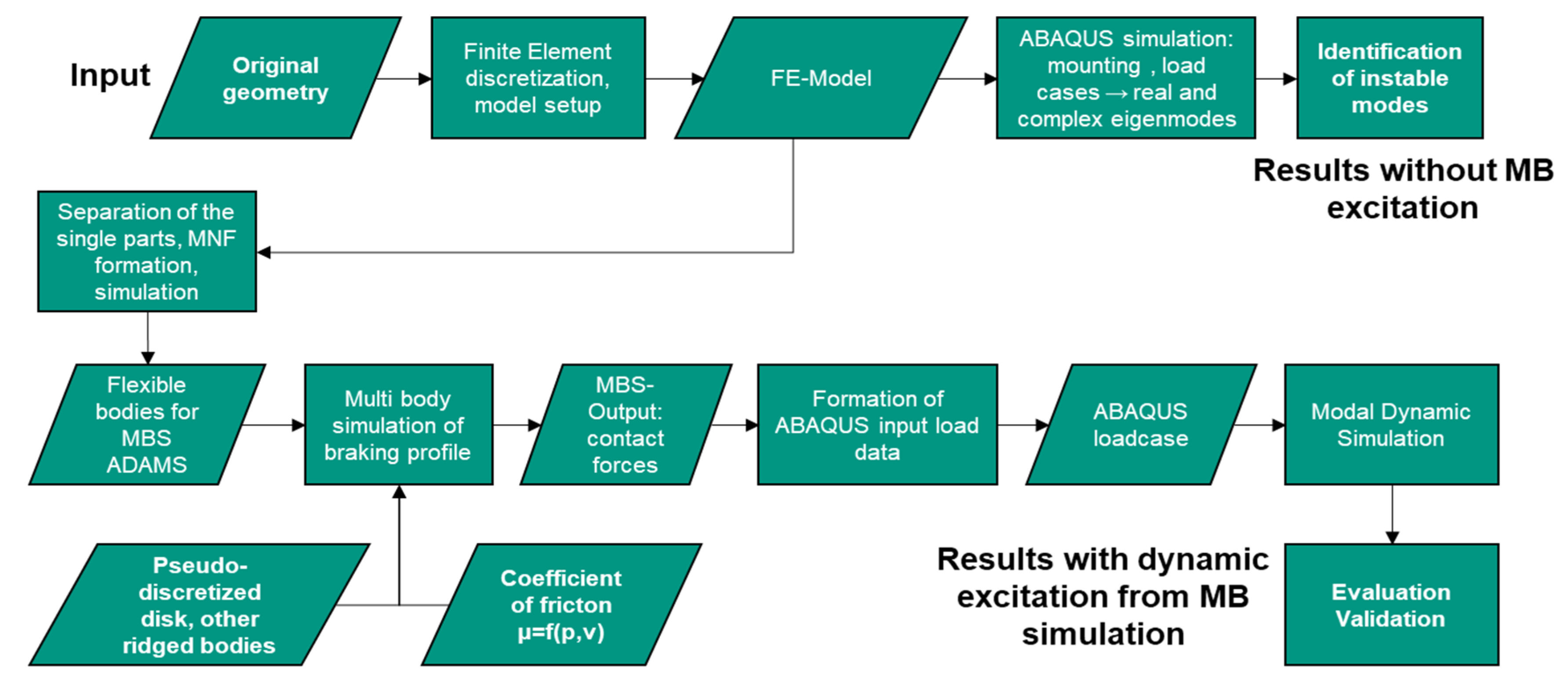
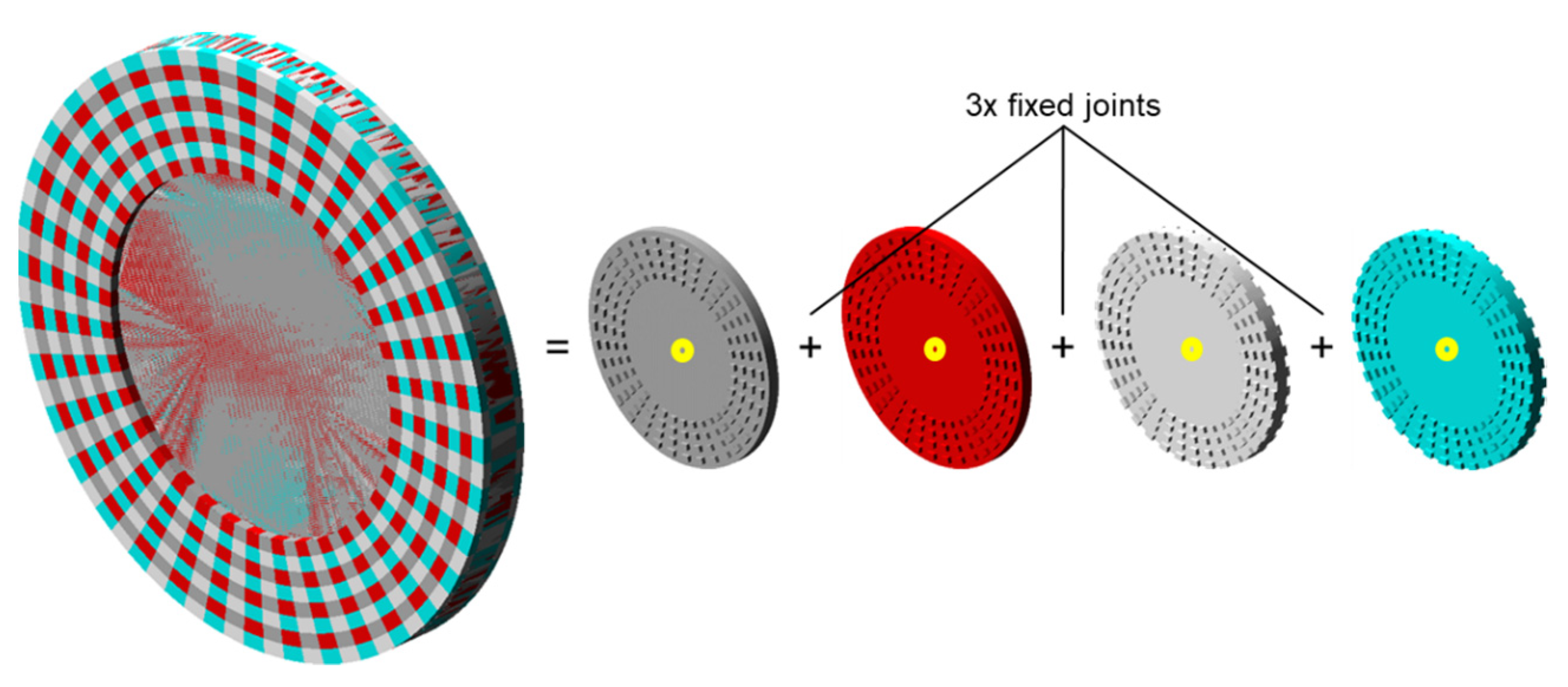
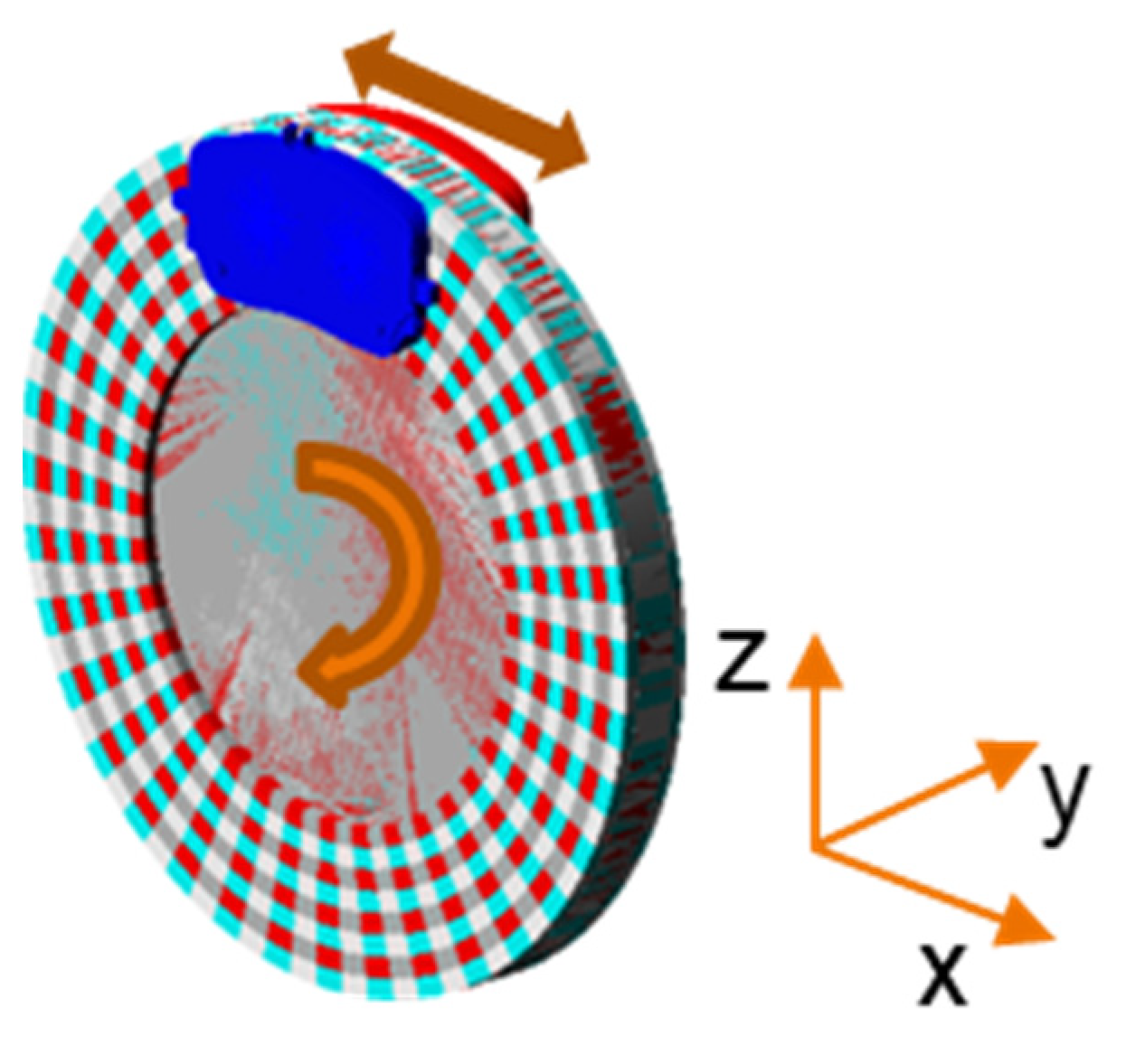
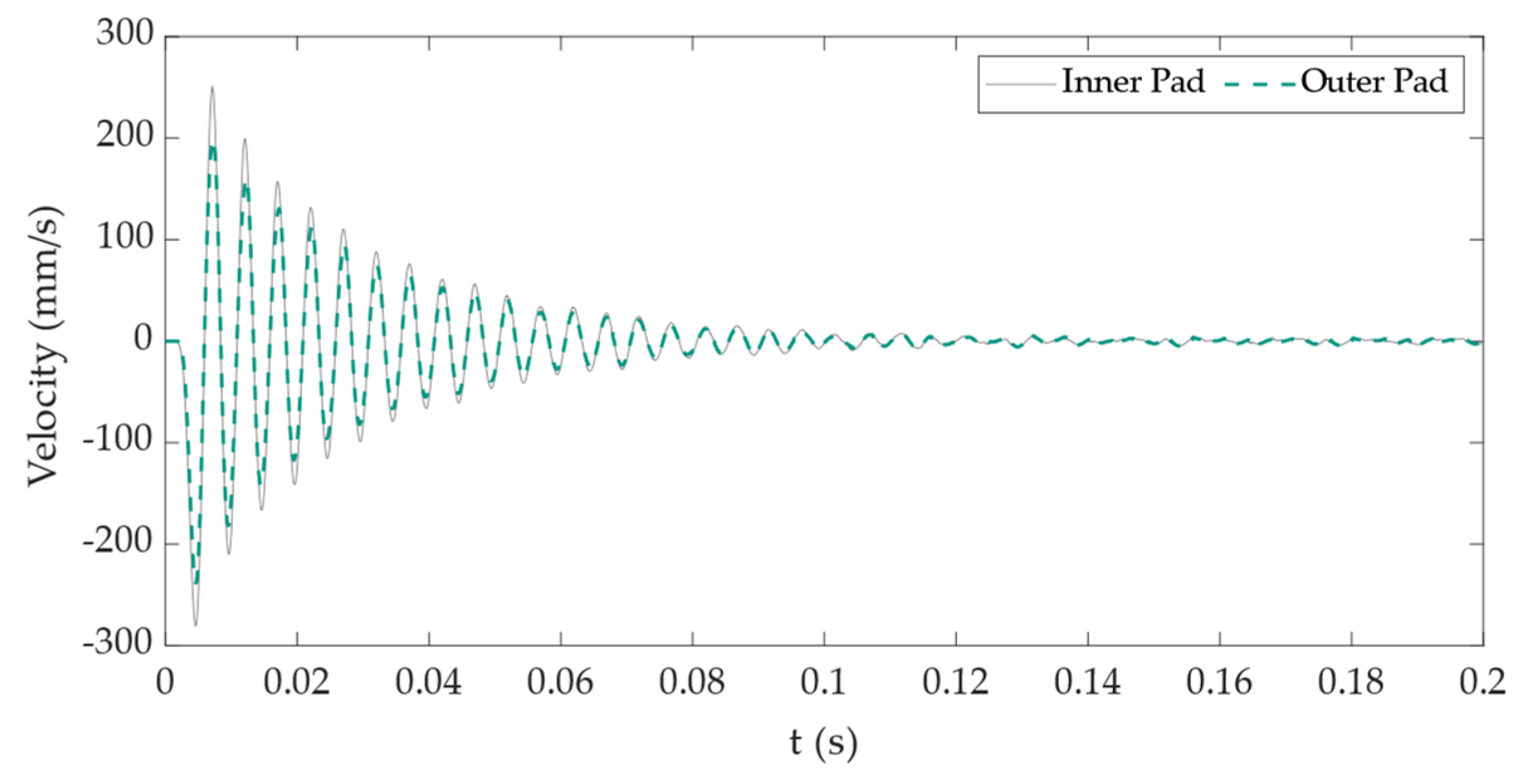
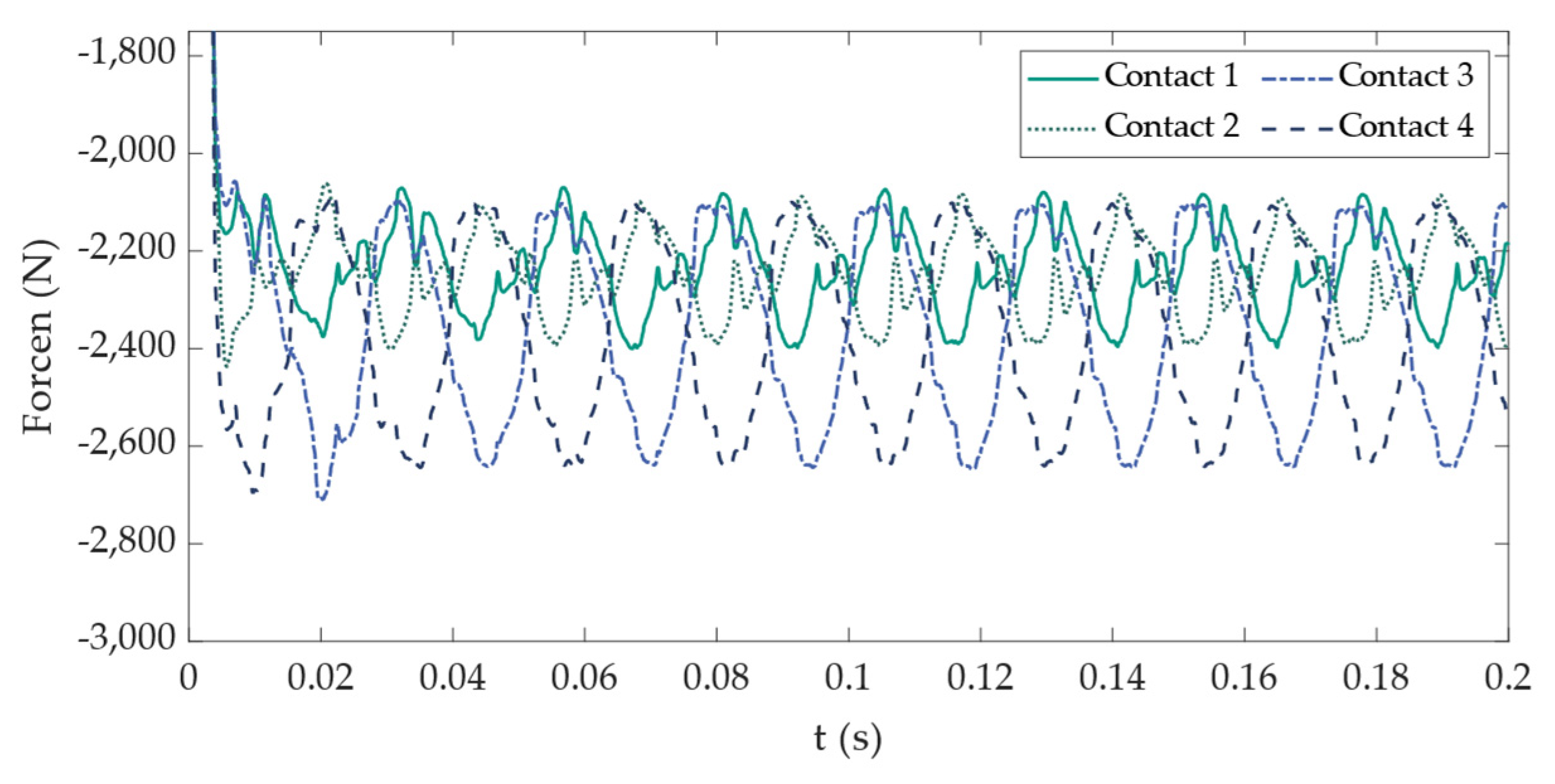
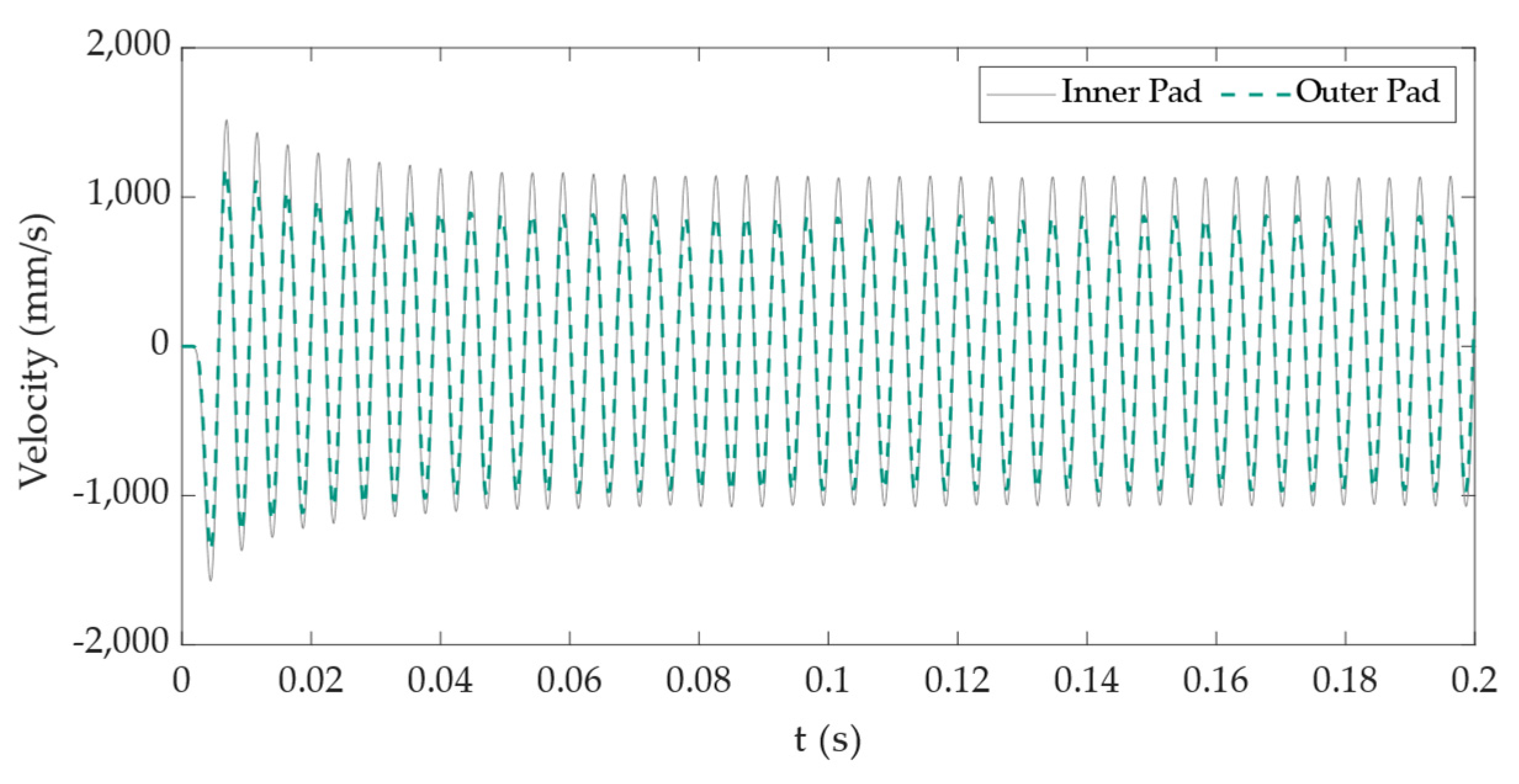
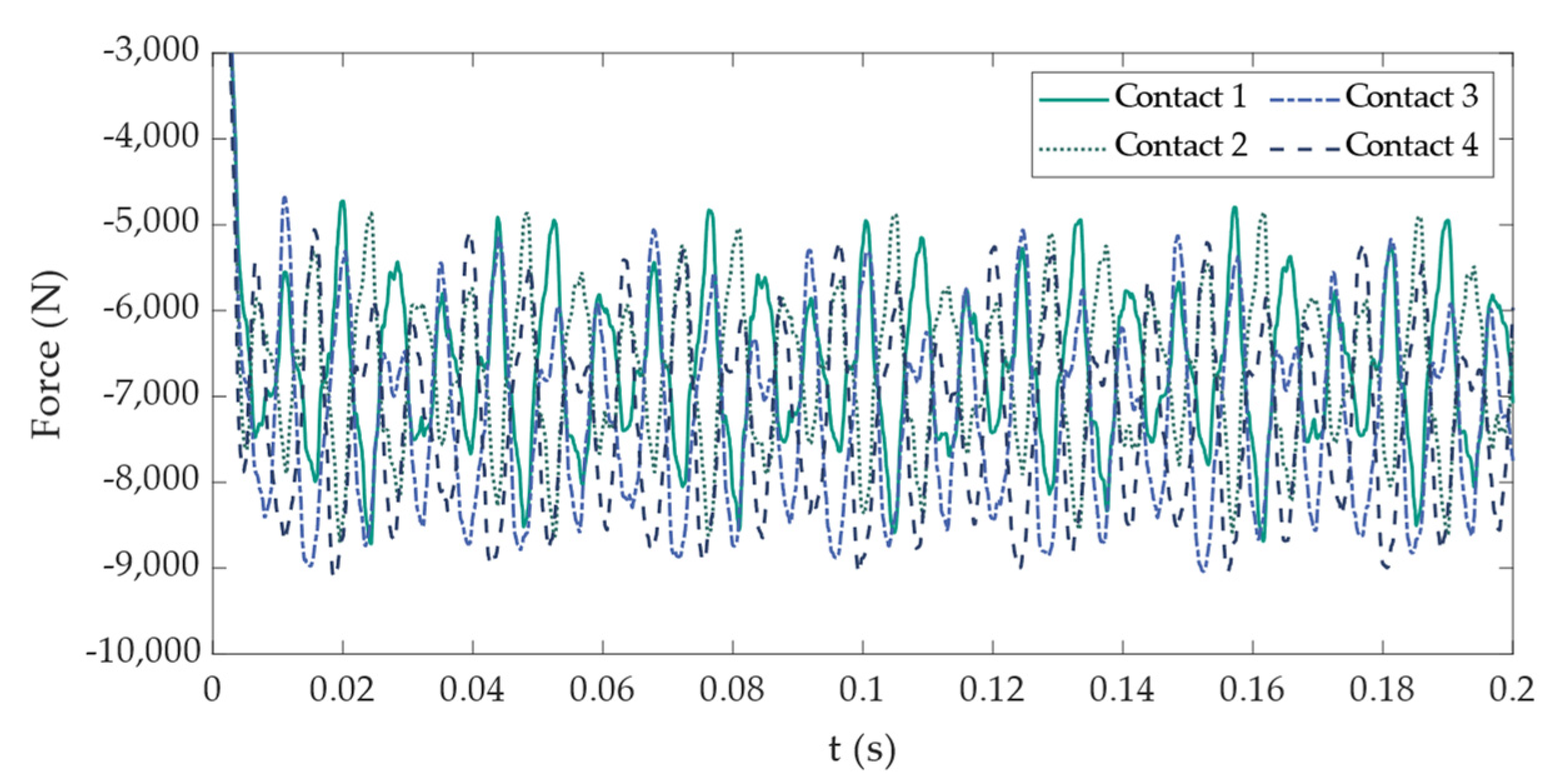
The FE based coefficients of friction were transferred to an MB simulation, which comprised a pseudo-discretized contact. The presented oscillations show that this method is capable of the depiction of distributed contact properties. But the behavior of the brake system is highly dependent on the operation condition. For lower velocities, increasing the pressure simply causes higher damping and the oscillations decrease very fast. However, there is a critical speed, from which the increase of pressure leads to critically stable oscillation modes. This finding corresponds well with theoretical stability charts in the velocity vs. pressure space.
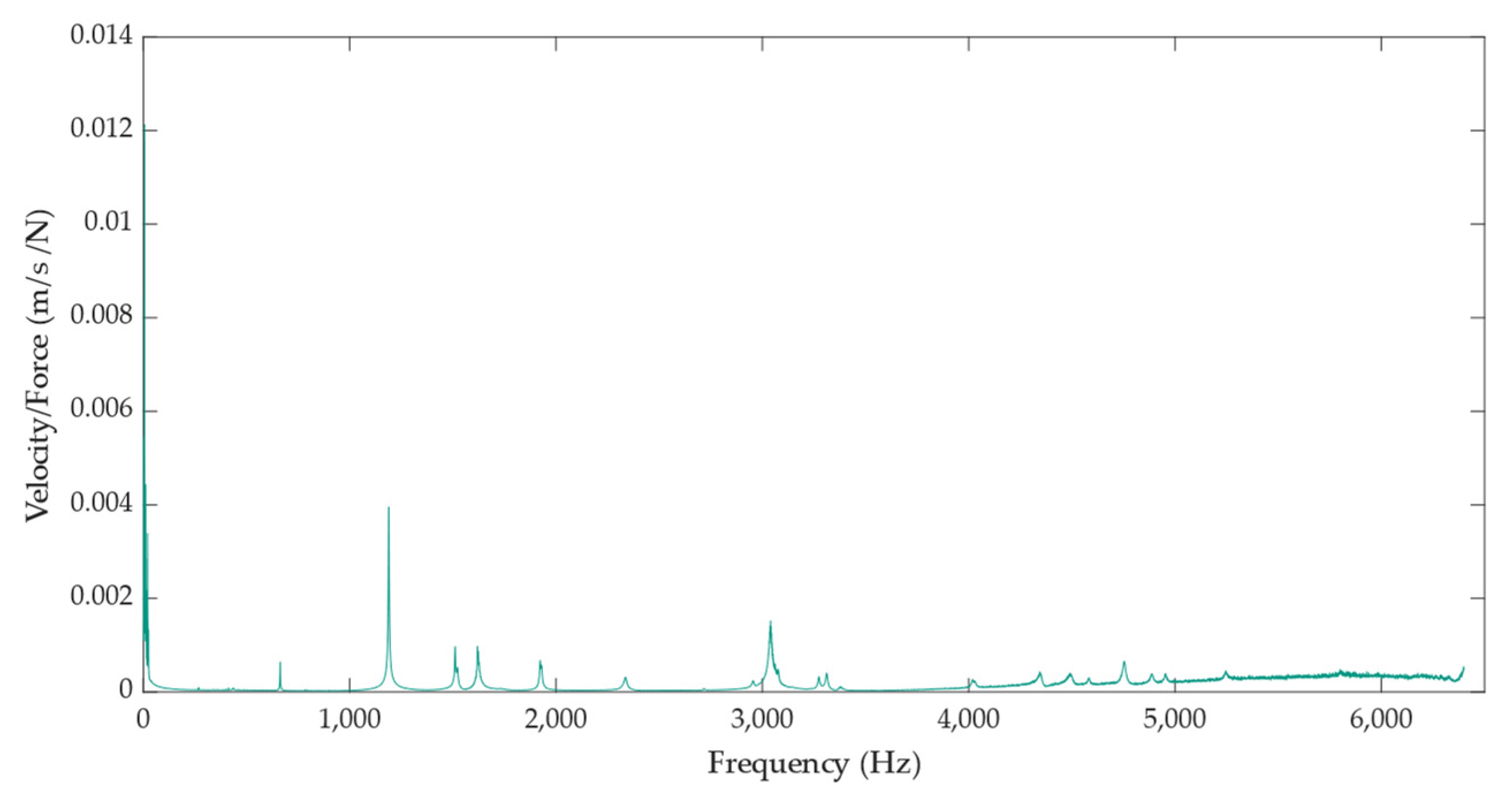
In our case, the coefficient of friction distribution is less sensitive to velocity and depends mainly on pressure. At the critical speed, small changes in the coefficient of friction, in particular at higher operating pressure, may lead the system into a critical stable oscillation mode. Even with distributed contacts, the dynamic model is still sensible to the regular oscillations. So, the pseudo-discretization, the size of the tessellated patches, may play a role, since the tessellation determines the maximal number of different coefficients of friction per second that are seen from the contact in rotating mode. The first examination shows that the expected frequencies due to the pseudo-discretization and the speed of rotation do not correlate with the frequencies reported in
Section 3.2. Thus, the oscillations in
Section 3.2. are not a consequence to the pseudo discretization, but are a physical system response from the geometry.
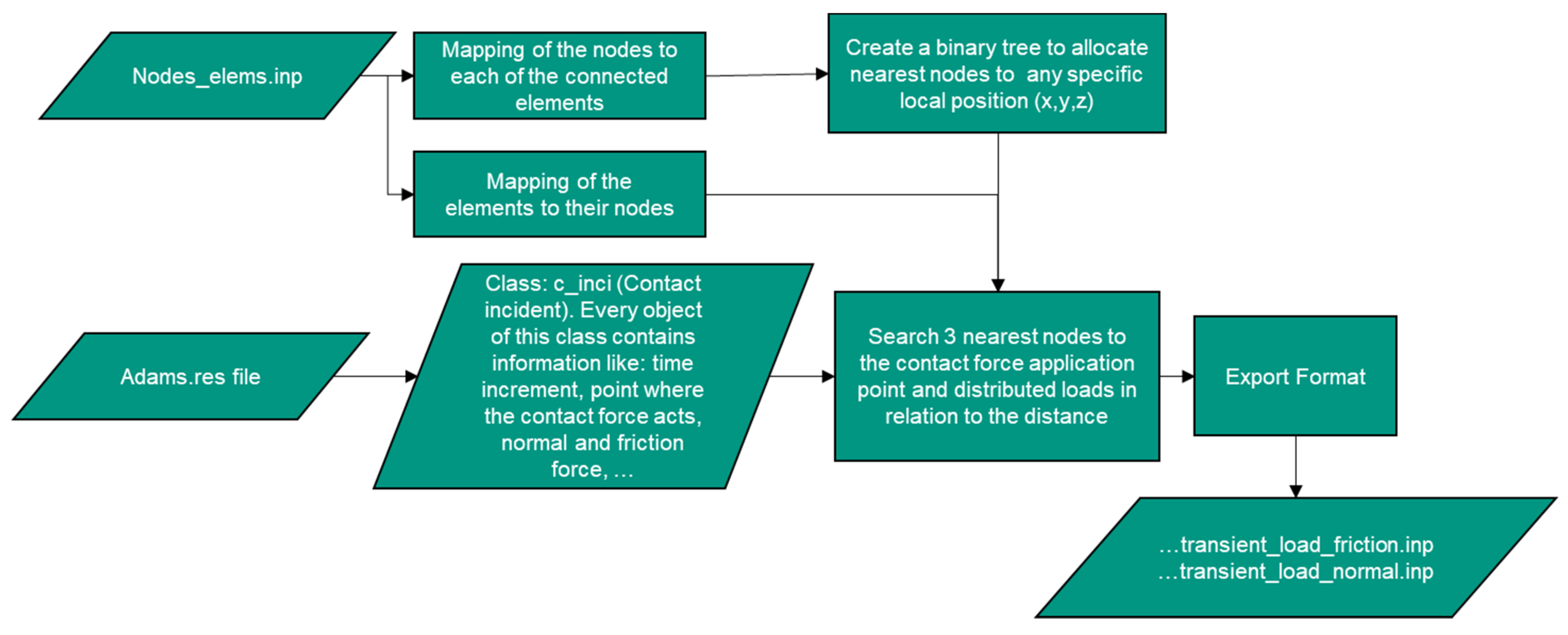
Here, further investigation is necessary to evaluate the impact of the pseudo-discretized approach. Certainly, for each system there will be an optimal pseudo-discretized resolution. However, the main impact should have the spread of the local pressure, which depends on the micro scale topology of the contact and the realization of this situation in the microscale tribological model. This method enables engineers to test different friction distributions even with considering the system geometry. However, the transfer of the results to FE software turned out to be demanding. An own written code was necessary to transfer the excitation to the subsequent modal analysis.
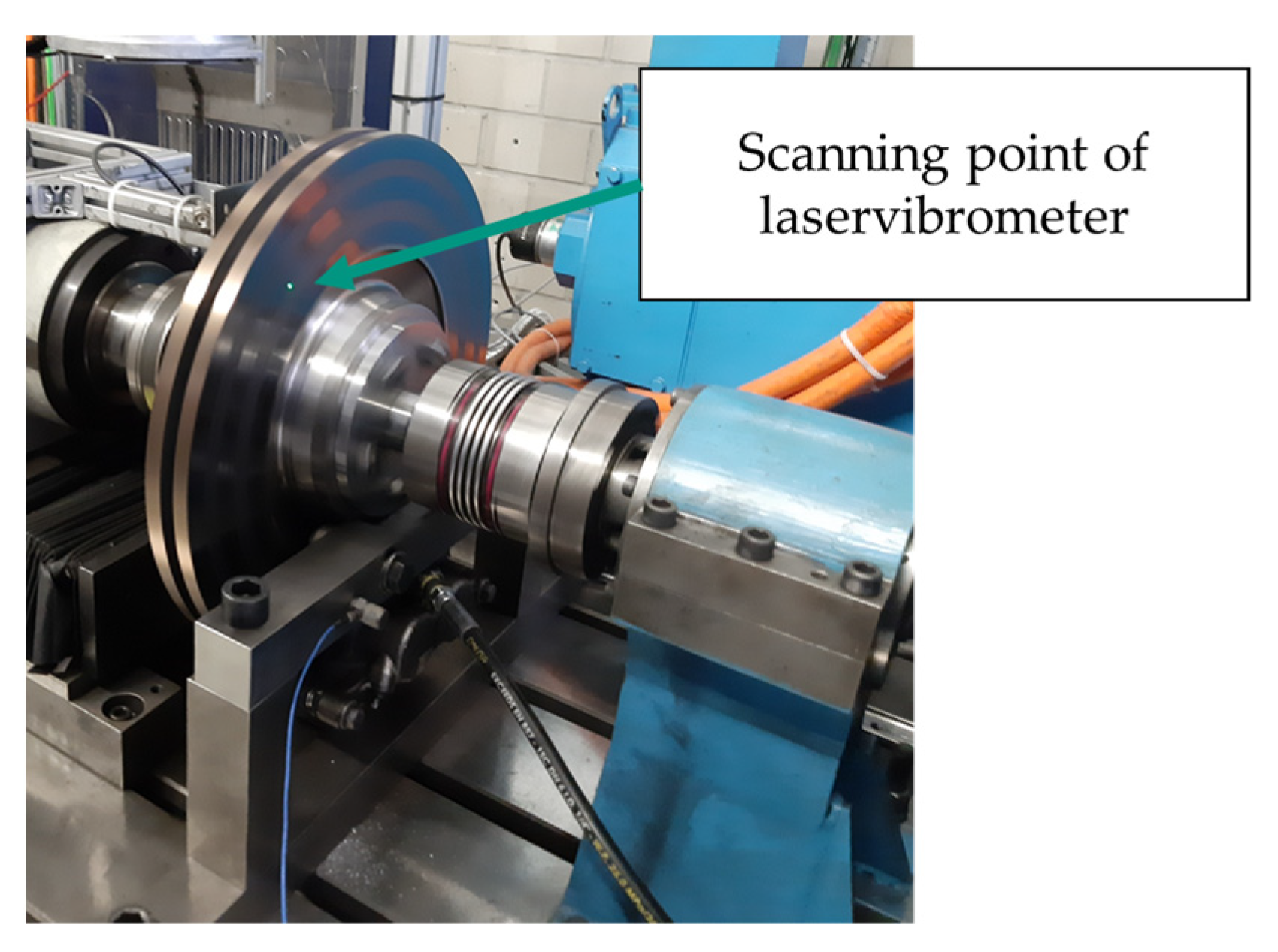
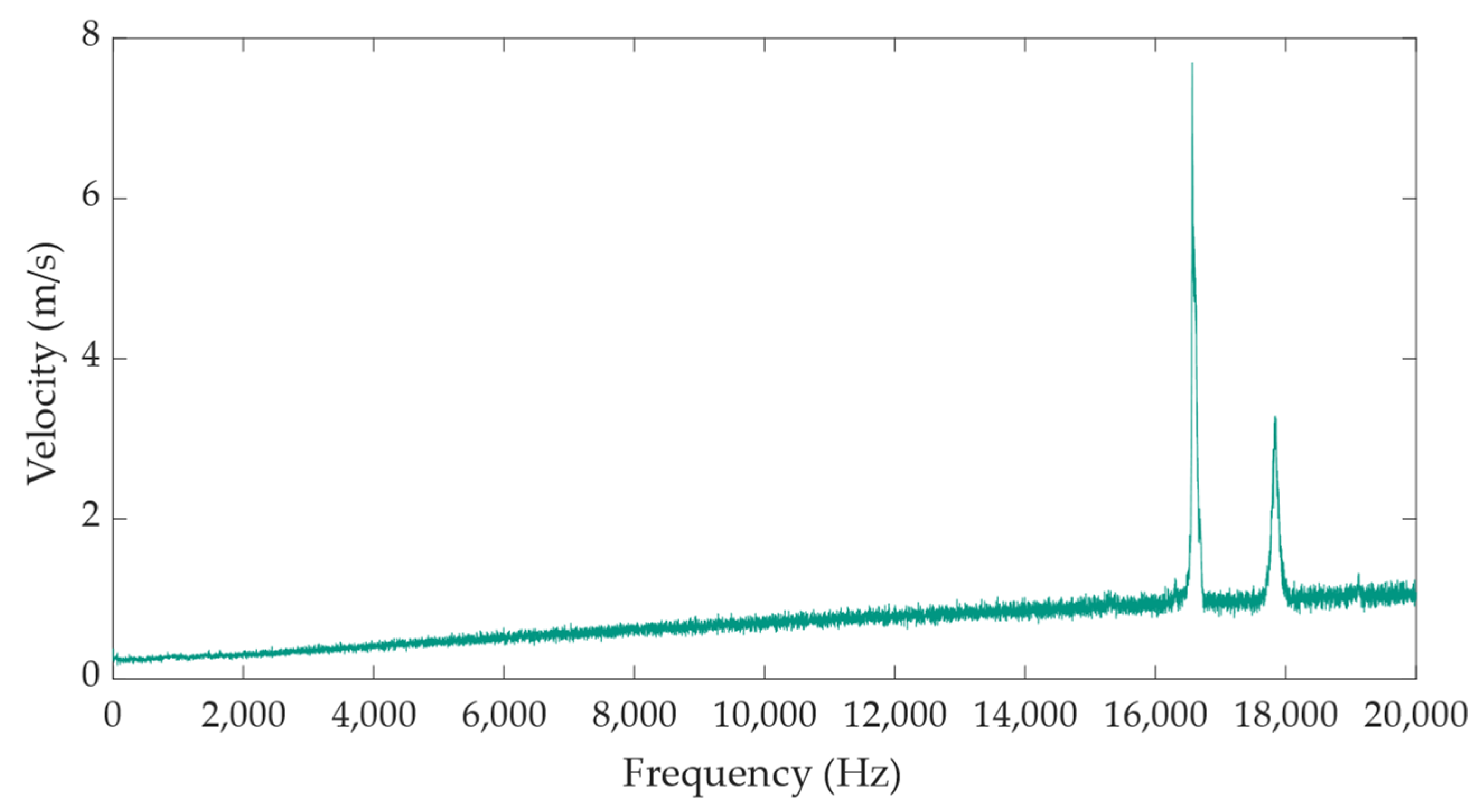
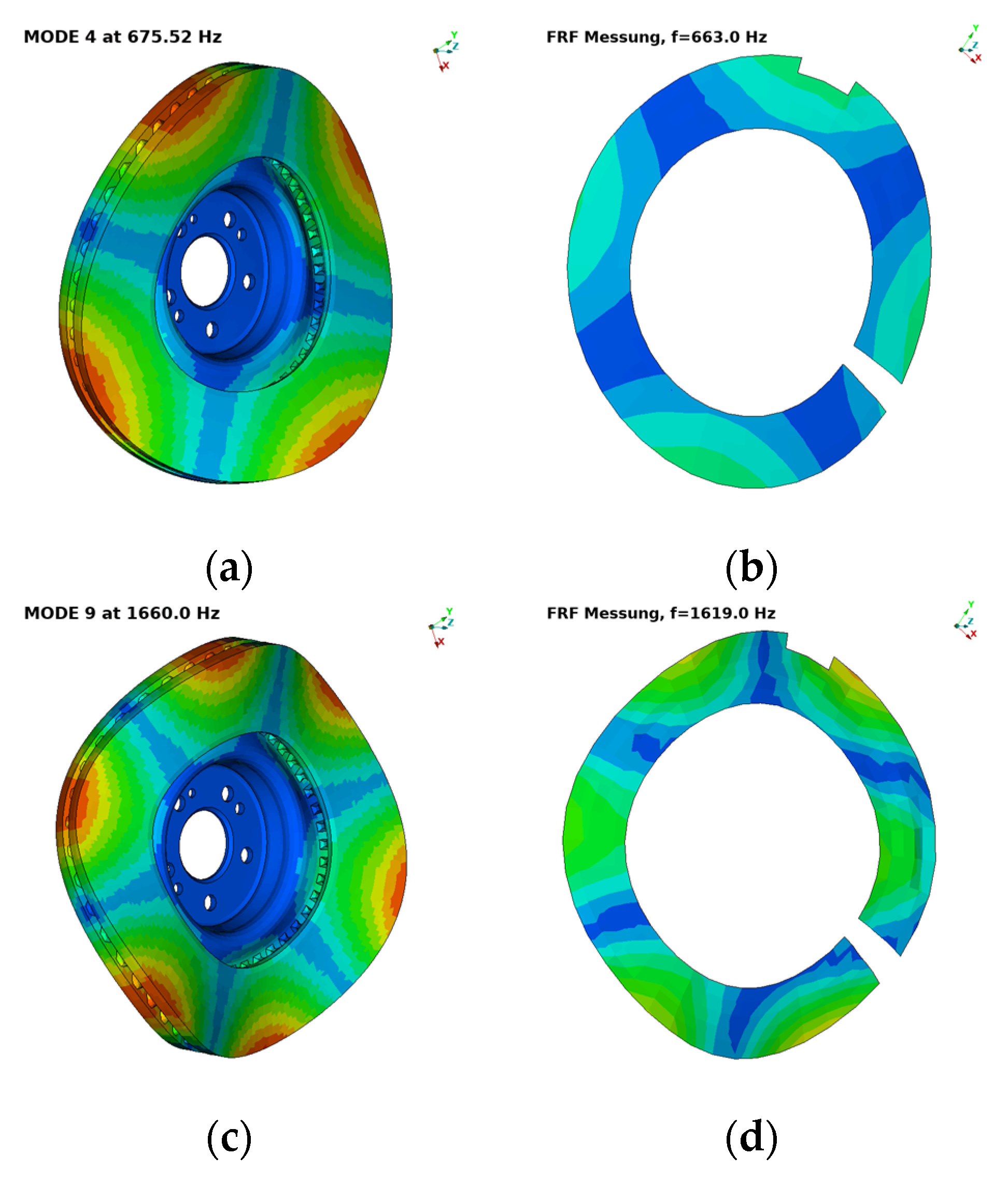
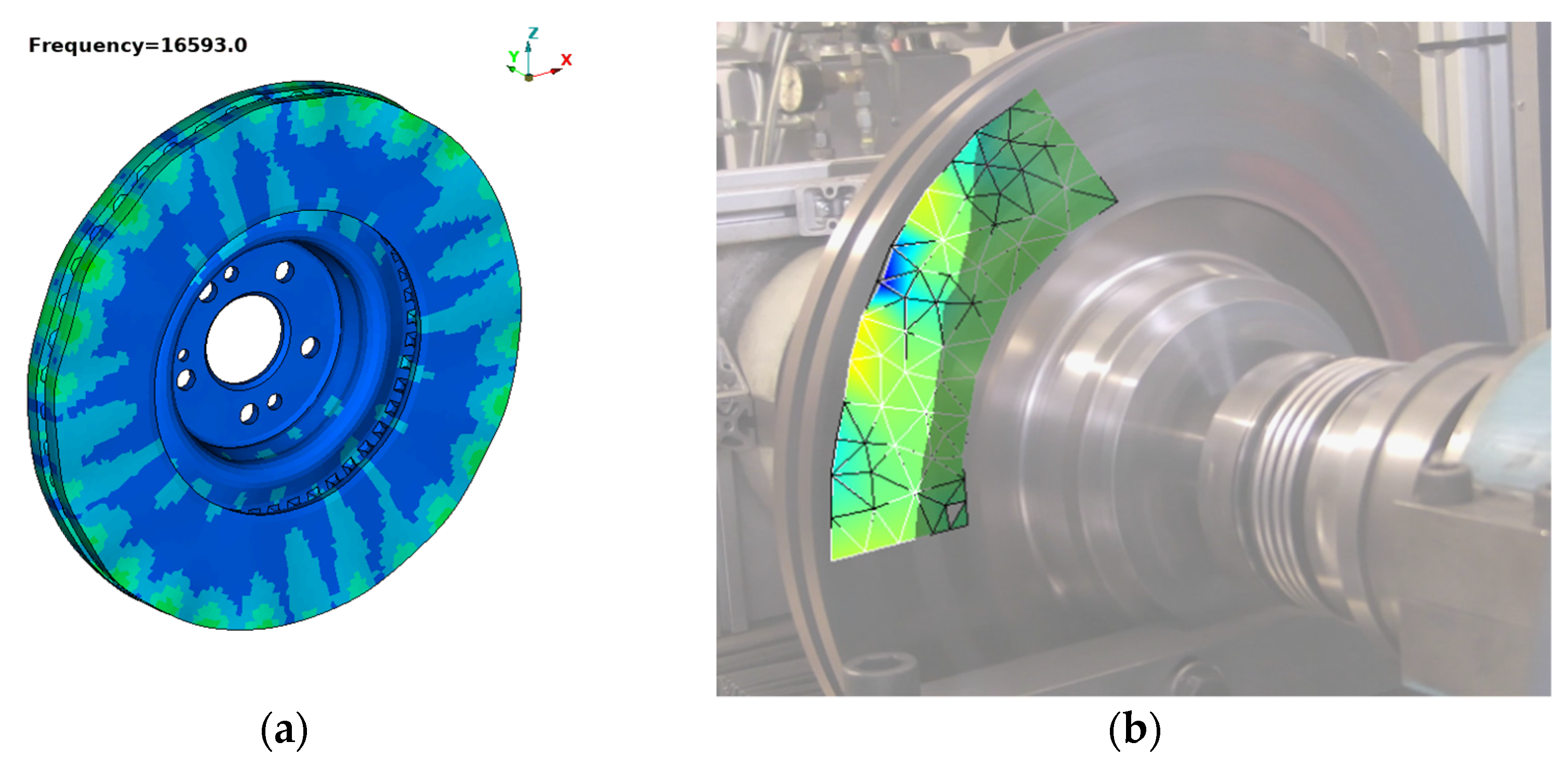
The experimental modal analyses were conducted with a laser vibrometer. The static analysis found eigenfrequencies of the brake disc. On the test bench, the statically determined eigenfrequencies were not measured, because they were not excited during the braking. With the experimental modal analysis on the test bench, two eigenfrequencies were measured. Both frequencies lie at the upper range of human hearing capability. Since the chosen brake system is known for squealing issues, the assumption has been made that the squealing occurs at lower frequencies at load stages, which were not excited by the used boundary conditions.
5. Conclusions
The FE friction model allows for the purposeful analysis of parameters, such as the velocity, the normal force or the surface roughness. However, more detail is to put on the material data because the deformations of the asperities of the underlying two solids determines the contact patches and, therefore, the resulting friction. Whereas the deformation of the cast iron is commonly available, the brake pad material must be further analyzed to depict its surface deformations. Furthermore, the coefficient of friction computation, which relies on the friction condition in the FE friction model, can be transferred to different technical or scientific systems. Such systems are regular journal bearing or different sliding systems, such as piston bearings. The shear stress dependent friction condition reliably defines the coefficient of friction for journal bearings. However, in the presented brake system, advanced friction conditions are necessary to get to the regular coefficients of friction for brake system. Possible extensions to the friction conditions are subroutines for FE simulations, which include, e.g., a contact area dependency.
The consequent use of commercially available software enhances the transfer of this approach to different systems. Single elements of this approach, such as the FE friction model or the distributed MB simulation, can be used for analyzing different technical systems. The presented method helps engineers to test different surface topographies or geometries in engineering processes before creating prototypes. Further investigations comprise the transfer of rough surfaces, as well as the application of this method on clutch systems. These systems have in contrast to brake systems an entire ring-shaped contact area.
In conclusion, the application of this method shows that the connection of different simulation methods is still a great challenge and shows why many engineering processes comprise single isolated methods instead of coupled simulations. However, the presented approach shows that the connection of different scales and methods delivers comprehensive knowhow. In the context of brake squealing, the consideration of the entire relevant frequency range is important, so no audible noise is neglected. The FE modal analysis is an especially valuable tool for developing brake systems because it allows one to easily vary geometrical parameters and to consider excitations. Finally, the research has proven that, even though the computation is virtually conducted, real world input is an indispensable element for a simulation and is necessary for further validation.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}