

A Deep Learning-Based Method to Detect Hot-Spots in the Visible Video Diagnostics of Wendelstein 7-X
 , , , and
, , , and 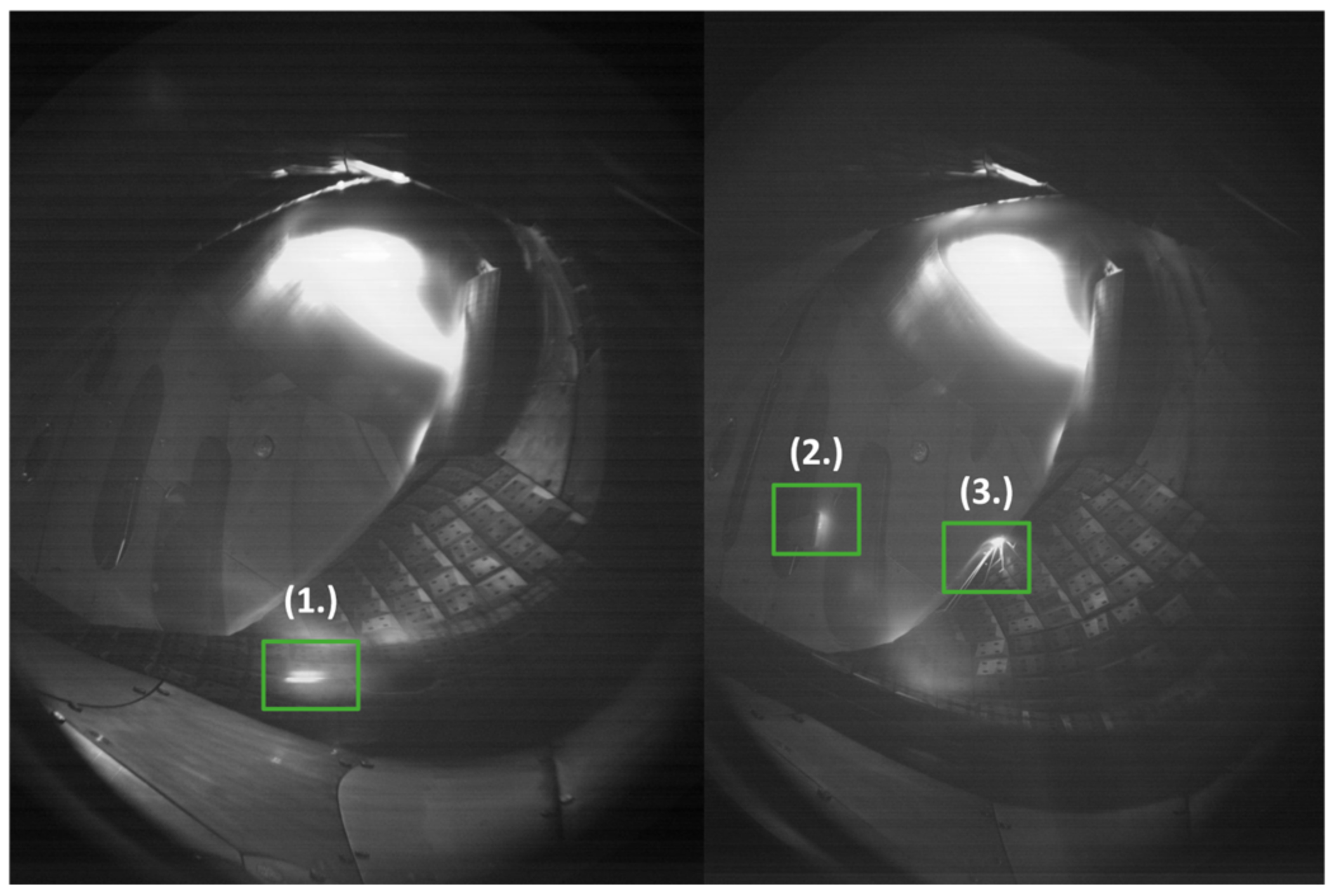{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
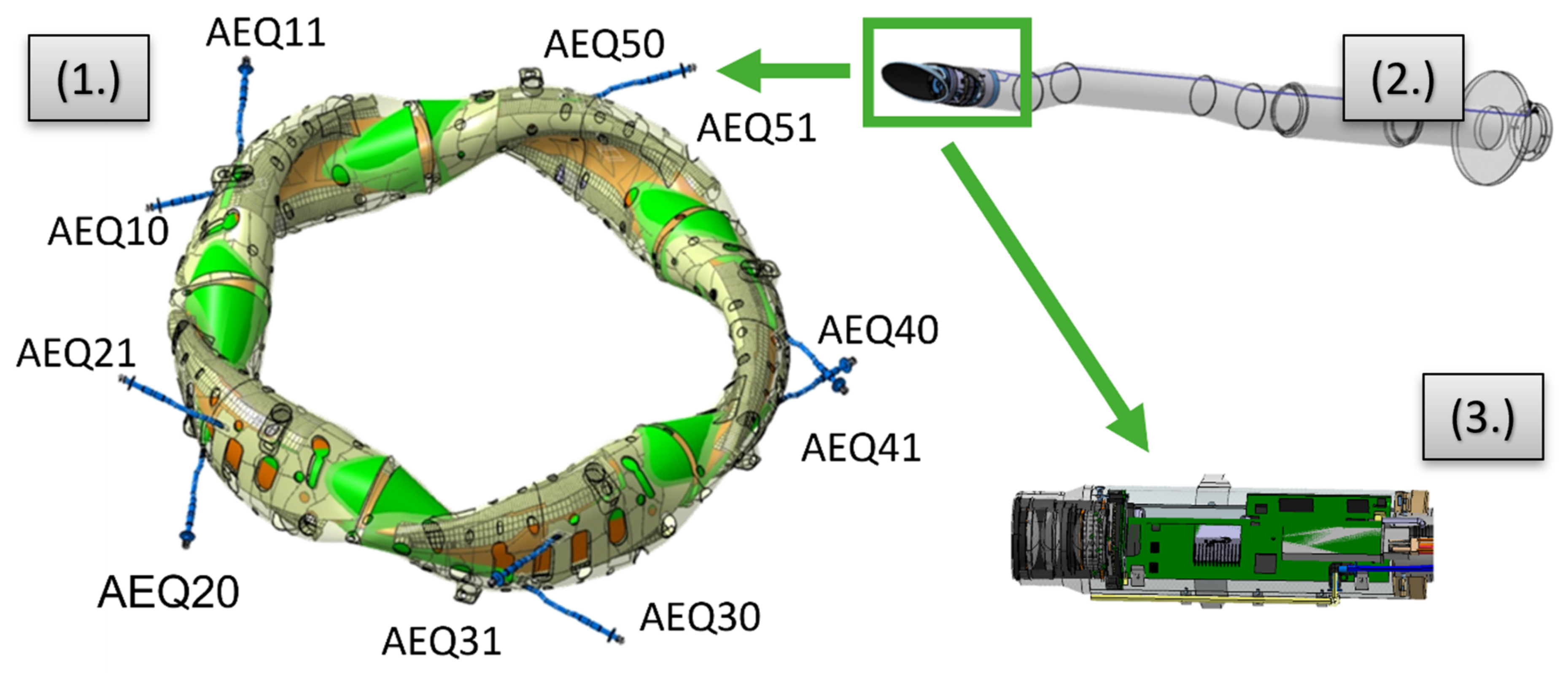
2. Visible Video Diagnostics on W7-X
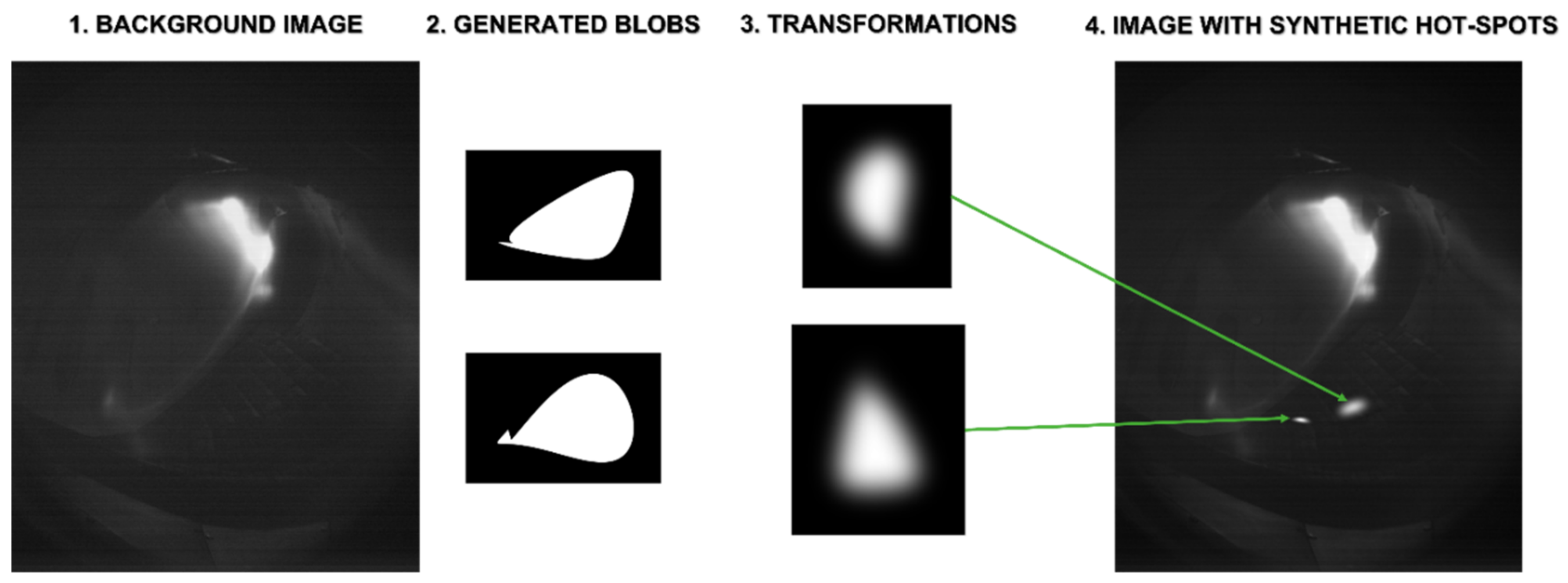
3. Real and Synthetic Hot-Spots
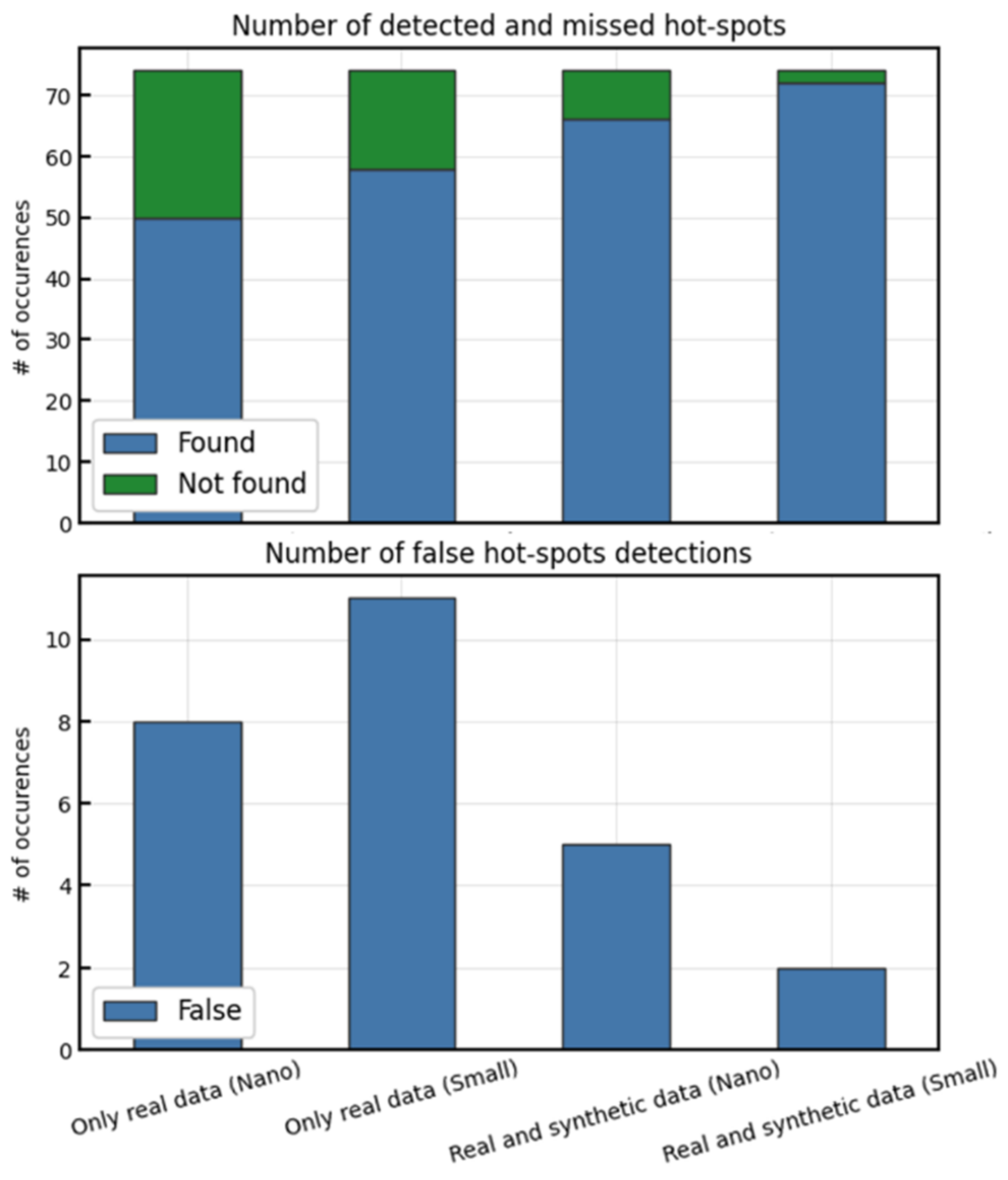
4. Training Details and Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beidler, C.; Grieger, G.; Herrnegger, F.; Harmeyer, E.; Kisslinger, J.; Lotz, W.; Maassberg, H.; Merkel, P.; Nührenberg, J.; Rau, F.; et al. Physics and Engineering Design for Wendelstein VII-X. Fusion Technol. 1990, 17, 148–168. [Google Scholar] [CrossRef]
- Pedersen, T.S.; König, R.; Krychowiak, M.; Jakubowski, M.; Baldzuhn, J.; Bozhenkov, S.; Fuchert, G.; Langenberg, A.; Niemann, H.; Zhang, D.; et al. First results from divertor operation in Wendelstein 7-X. Plasma Phys. Control. Fusion 2019, 61, 014035. [Google Scholar] [CrossRef] [Green Version]
- Klinger, T.; Alonso, A.; Bozhenkov, S.; Burhenn, R.; Dinklage, A.; Fuchert, G.; Geiger, J.; Grulke, O.; Langenberg, A.; Hirsch, M.; et al. Performance and properties of the first plasmas of Wendelstein 7-X. Plasma Phys. Control. Fusion 2017, 59, 014018. [Google Scholar] [CrossRef] [Green Version]
- Klinger, T.; Andreeva, T.; Bozhenkov, S.; Brandt, C.; Burhenn, R.; Buttenschön, B.; Fuchert, G.; Geiger, B.; Grulke, O.; Laqua, H.P.; et al. Overview of first Wendelstein 7-X high performance operation. Nucl. Fusion 2019, 59, 112004. [Google Scholar] [CrossRef]
- Pedersen, T.S.; Abramovic, I.; Agostinetti, P.; Agredano Torres, M.; Äkäslompolo, S.; Alcuson Belloso, J.; Aleynikov, P.; Aleynikova, K.; Alhashimi, M.; Ali, A.; et al. Experimental confirmation of efficient island divertor operation and successful neoclassical transport optimization. Nucl. Fusion 2022, 62, 042022. [Google Scholar] [CrossRef]
- Puig Sitjes, A.; Jakubowski, M.; Naujoks, D.; Gao, Y.; Drewelow, P.; Niemann, H.; Fellinger, J.; Moncada, V.; Pisano, F.; Belafdil, C.; et al. Real-Time Detection of Overloads on the Plasma-Facing Components of Wendelstein 7-X. Appl. Sci. 2021, 11, 11969. [Google Scholar] [CrossRef]
- Degrave, J.; Felici, F.; Buchli, J.; Neunert, M.; Tracey, B.; Carpanese, F.; Ewalds, T.; Hafner, R.; Abdolmaleki, A.; de las Casas, D.; et al. Magnetic control of tokamak plasmas through deep reinforcement learning. Nature 2022, 602, 414–419. [Google Scholar] [CrossRef] [PubMed]
- Merlo, A.; Böckenhoff, D.; Schilling, J.; Höfel, U.; Kwak, S.; Svensson, J.; Pavone, A.; Lazerson, S.A.; Pedersen, T.S. Proof of concept of a fast surrogate model of the VMEC code via neural networks in Wendelstein 7-X scenarios. Nucl. Fusion 2021, 61, 096039. [Google Scholar] [CrossRef]
- Dong, G.; Wei, X.; Bao, J.; Brochard, G.; Lin, Z.; Tang, W. Deep learning based surrogate models for first-principles global simulations of fusion plasmas. Nucl. Fusion 2021, 61, 126061. [Google Scholar] [CrossRef]
- Szűcs, M.; Szepesi, T.; Biedermann, C.; Cseh, G.; Jakubowski, M.; Kocsis, G.; König, R.; Krause, M.; Perseo, V.; Sitjes, A.P.; et al. Detecting Plasma Detachment in the Wendelstein 7-X Stellarator Using Machine Learning. Appl. Sci. 2022, 12, 269. [Google Scholar] [CrossRef]
- Aymerich, E.; Sias, G.; Pisano, F.; Cannas, B.; Carcangiu, S.; Sozzi, C.; Stuart, C.; Carvalho, P.J.; Fanni, A. and JET Contributors. Disruption prediction at JET through deep convolutional neural networks using spatiotemporal information from plasma profiles. Nucl. Fusion 2022, 62, 066005. [Google Scholar] [CrossRef]
- Jalalvand, A.; Abbate, J.; Conlin, R.; Verdoolaege, G.; Kolemen, E. Real-Time and Adaptive Reservoir Computing with Application to Profile Prediction in Fusion Plasma. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 2630–2641. [Google Scholar] [CrossRef] [PubMed]
- Kocsis, G.; Baross, T.; Biedermann, C.; Bodnár, G.; Cseh, G.; Ilkei, T.; König, R.; Otte, M.; Szabolics, T.; Szepesi, T.; et al. Overview video diagnostics for the W7-X stellarator. Fus. Eng. Des. 2015, 808, 96–97. [Google Scholar] [CrossRef]
- Zoletnik, S.; Szabolics, T.; Kocsis, G.; Szepesi, T.; Dunai, D. EDICAM (Event Detection Intelligent Camera). Fus. Eng. Des. 2013, 88, 1405. [Google Scholar] [CrossRef]
- Spolladore, L. On the detection of MARFE with visible cameras for disruption prevention. In Proceedings of the Symposium on Fusion Technology, Dubrovnik, Croatia, 18–23 September 2022. [Google Scholar]
- Available online: https://www.github.com/ultralytics/yolov5 (accessed on 12 December 2022).
- Cseh, G. Integrating EDICAM into the MARTe framework. In Proceedings of the Symposium on Fusion Technology, Dubrovnik, Croatia, 18–23 September 2022. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szűcs, M.; Szepesi, T.; Biedermann, C.; Cseh, G.; Jakubowski, M.; Kocsis, G.; König, R.; Krause, M.; Sitjes, A.P.; the W7-X Team. A Deep Learning-Based Method to Detect Hot-Spots in the Visible Video Diagnostics of Wendelstein 7-X. J. Nucl. Eng. 2022, 3, 473-479. https://doi.org/10.3390/jne3040033
Szűcs M, Szepesi T, Biedermann C, Cseh G, Jakubowski M, Kocsis G, König R, Krause M, Sitjes AP, the W7-X Team. A Deep Learning-Based Method to Detect Hot-Spots in the Visible Video Diagnostics of Wendelstein 7-X. Journal of Nuclear Engineering. 2022; 3(4):473-479. https://doi.org/10.3390/jne3040033
Chicago/Turabian StyleSzűcs, Máté, Tamás Szepesi, Christoph Biedermann, Gábor Cseh, Marcin Jakubowski, Gábor Kocsis, Ralf König, Marco Krause, Aleix Puig Sitjes, and the W7-X Team. 2022. "A Deep Learning-Based Method to Detect Hot-Spots in the Visible Video Diagnostics of Wendelstein 7-X" Journal of Nuclear Engineering 3, no. 4: 473-479. https://doi.org/10.3390/jne3040033
APA StyleSzűcs, M., Szepesi, T., Biedermann, C., Cseh, G., Jakubowski, M., Kocsis, G., König, R., Krause, M., Sitjes, A. P., & the W7-X Team. (2022). A Deep Learning-Based Method to Detect Hot-Spots in the Visible Video Diagnostics of Wendelstein 7-X. Journal of Nuclear Engineering, 3(4), 473-479. https://doi.org/10.3390/jne3040033