


Τhe “GPS/GNSS on Boat” Technique for the Determination of the Sea Surface Topography and Geoid: A Critical Review

Abstract
:1. Introduction
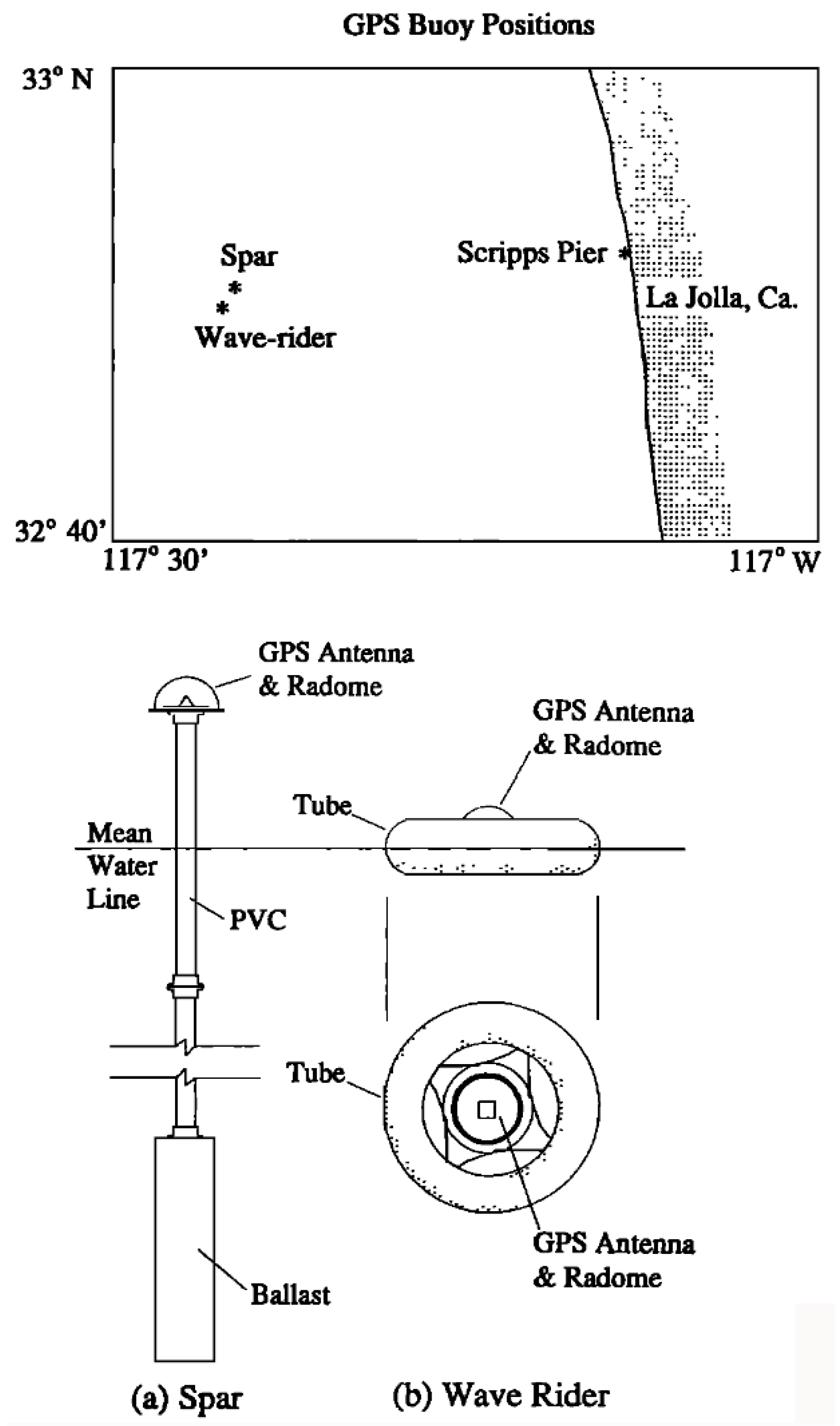
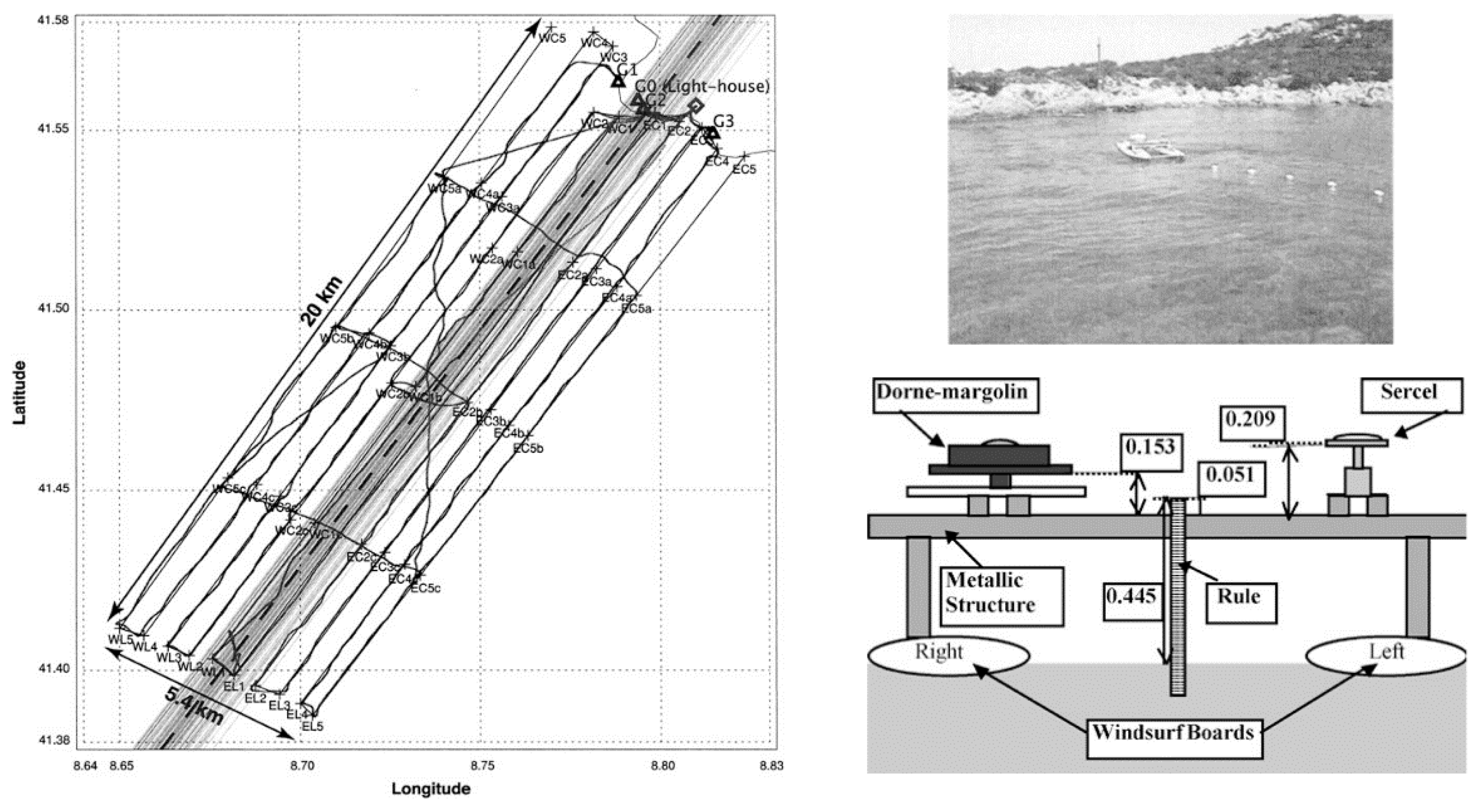
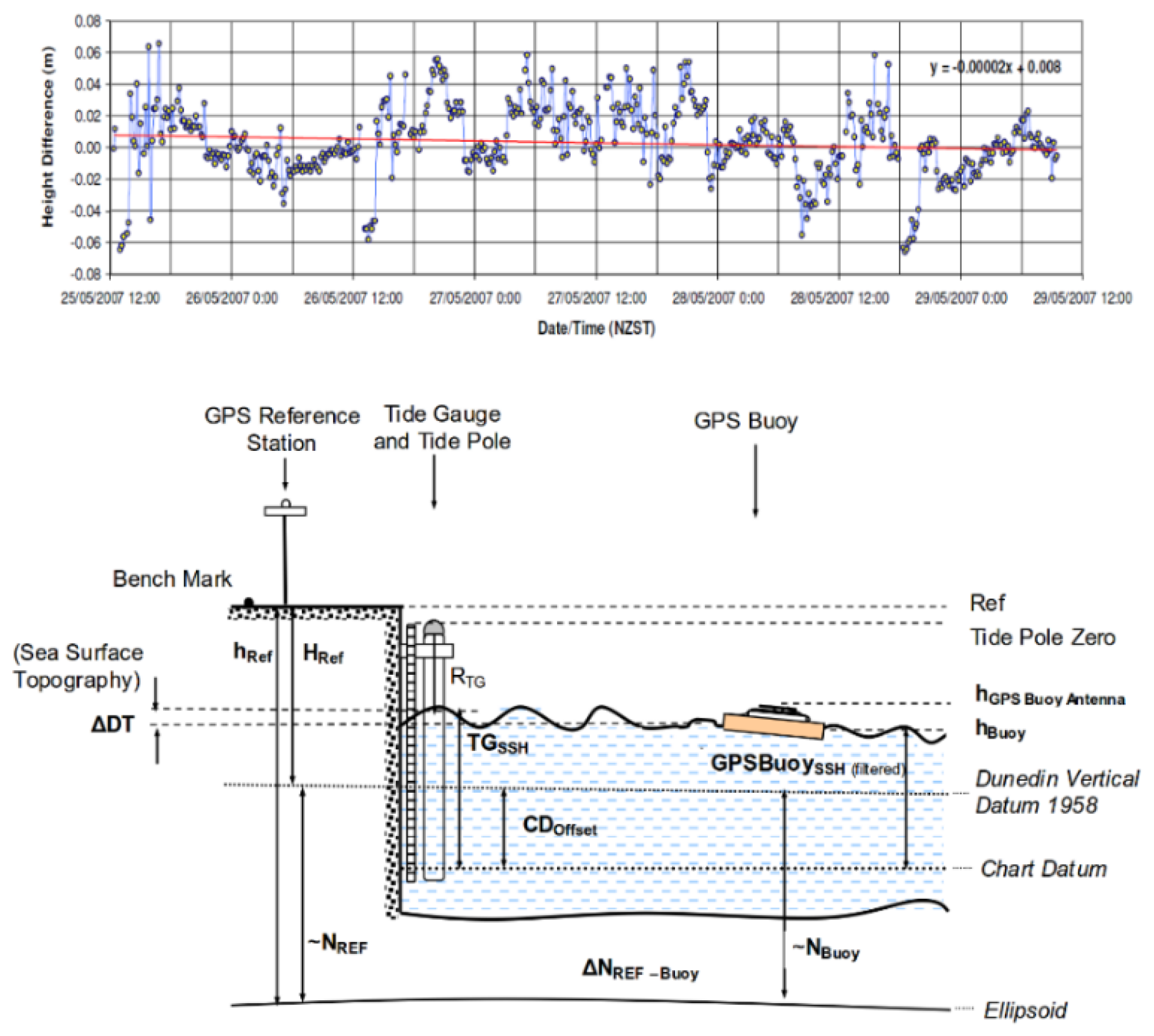
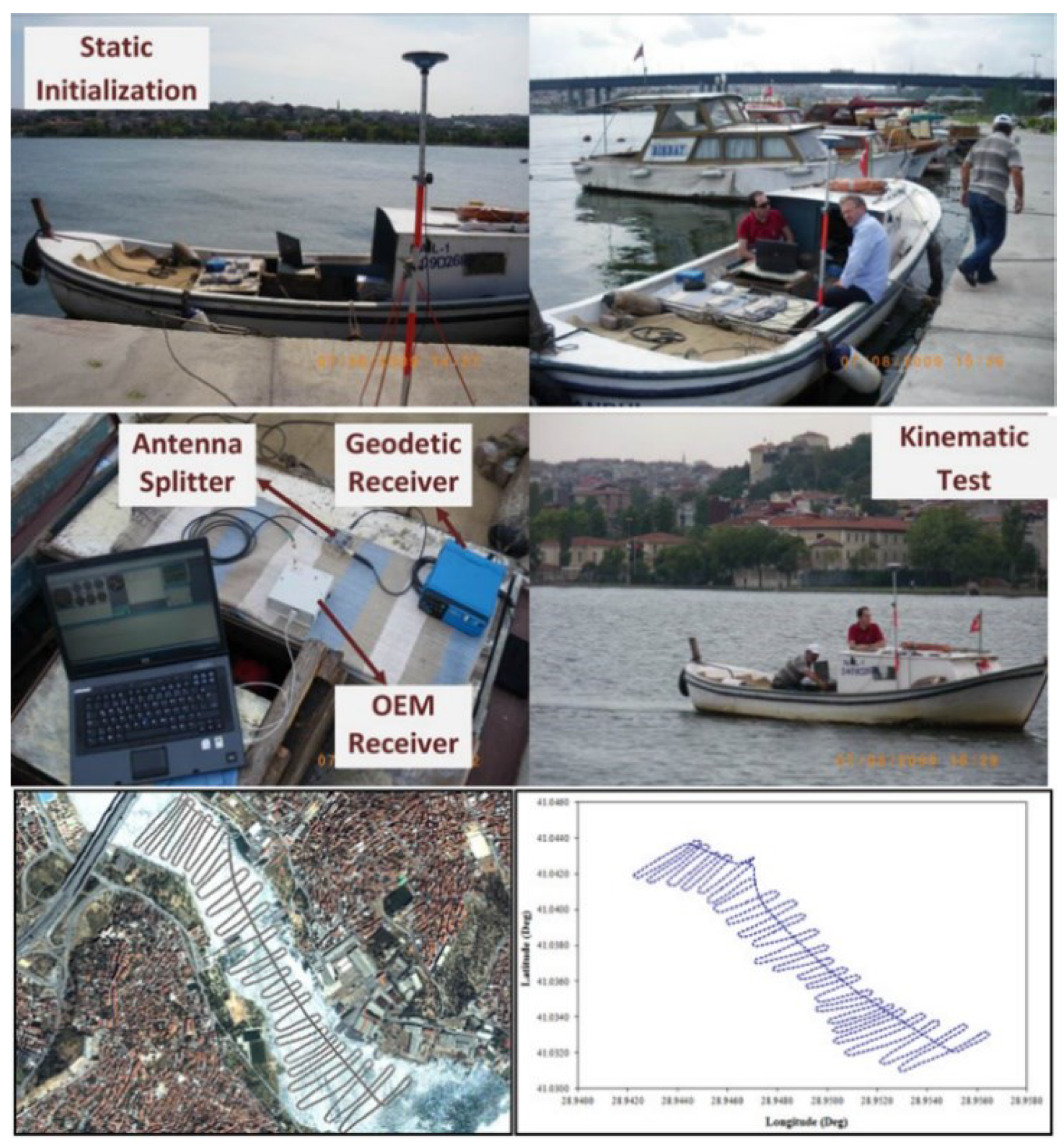
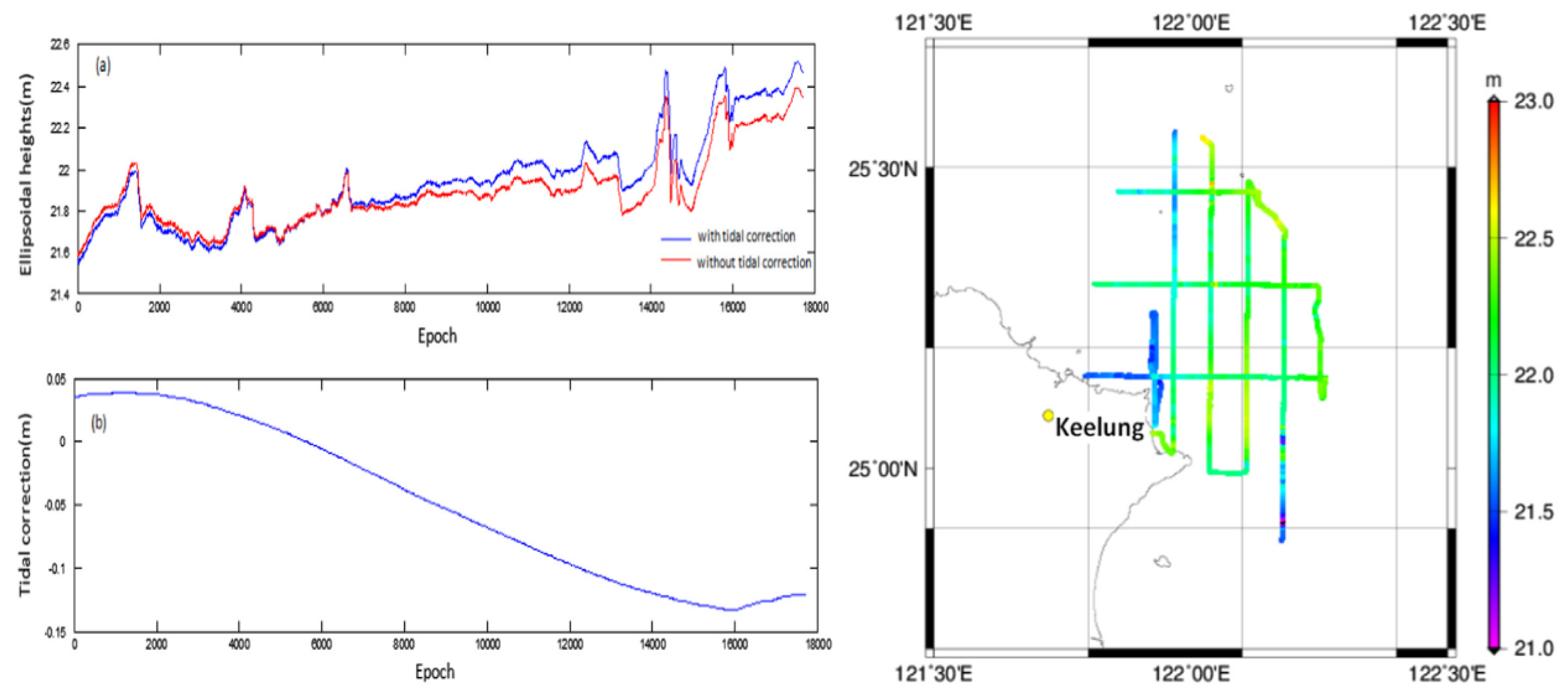
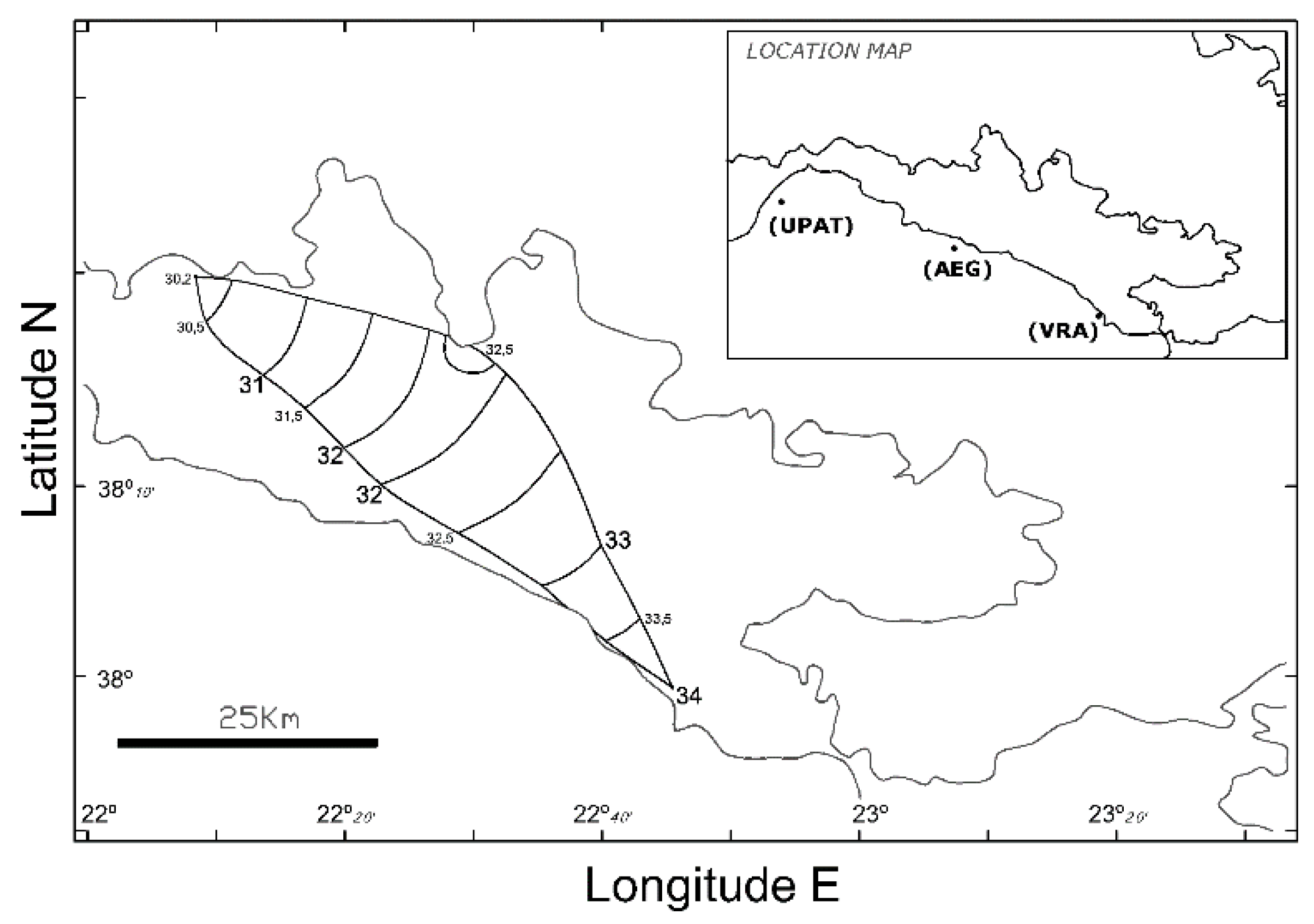
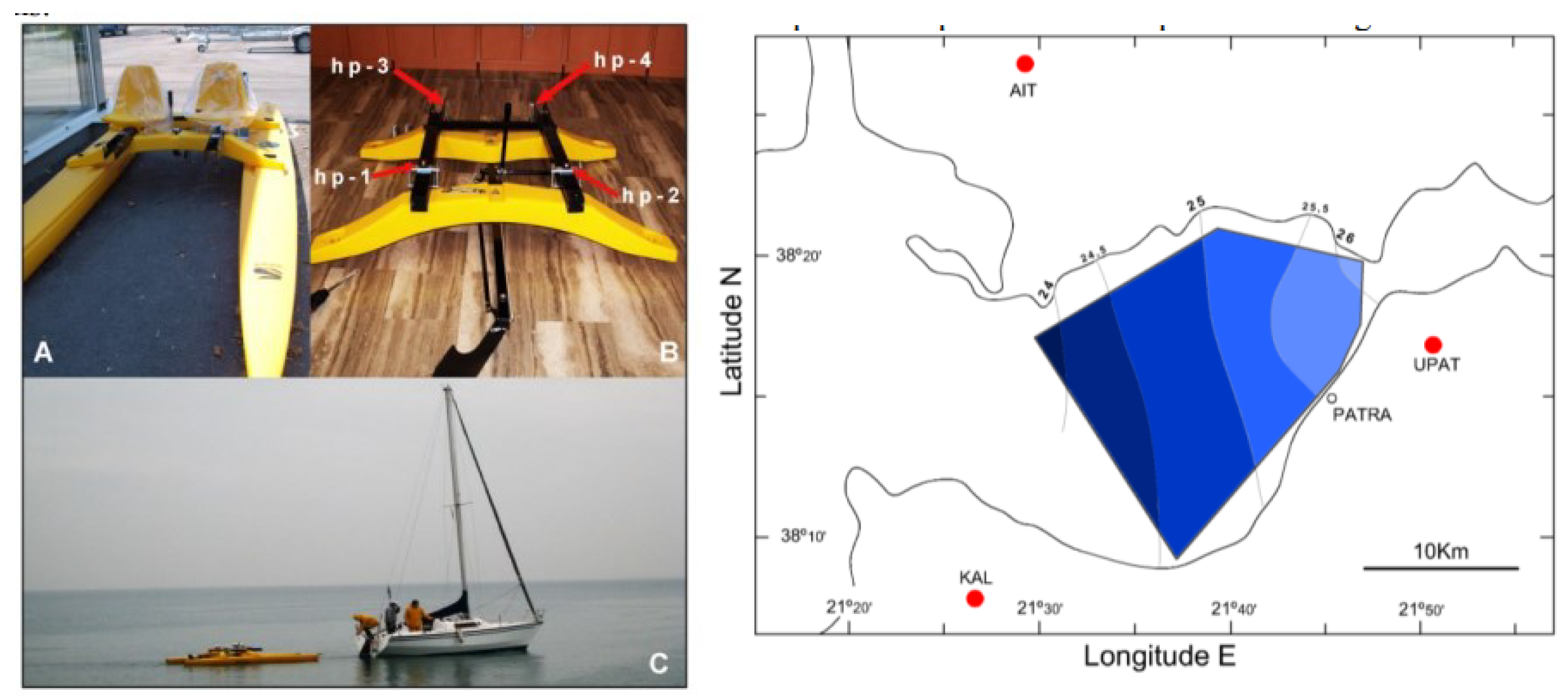
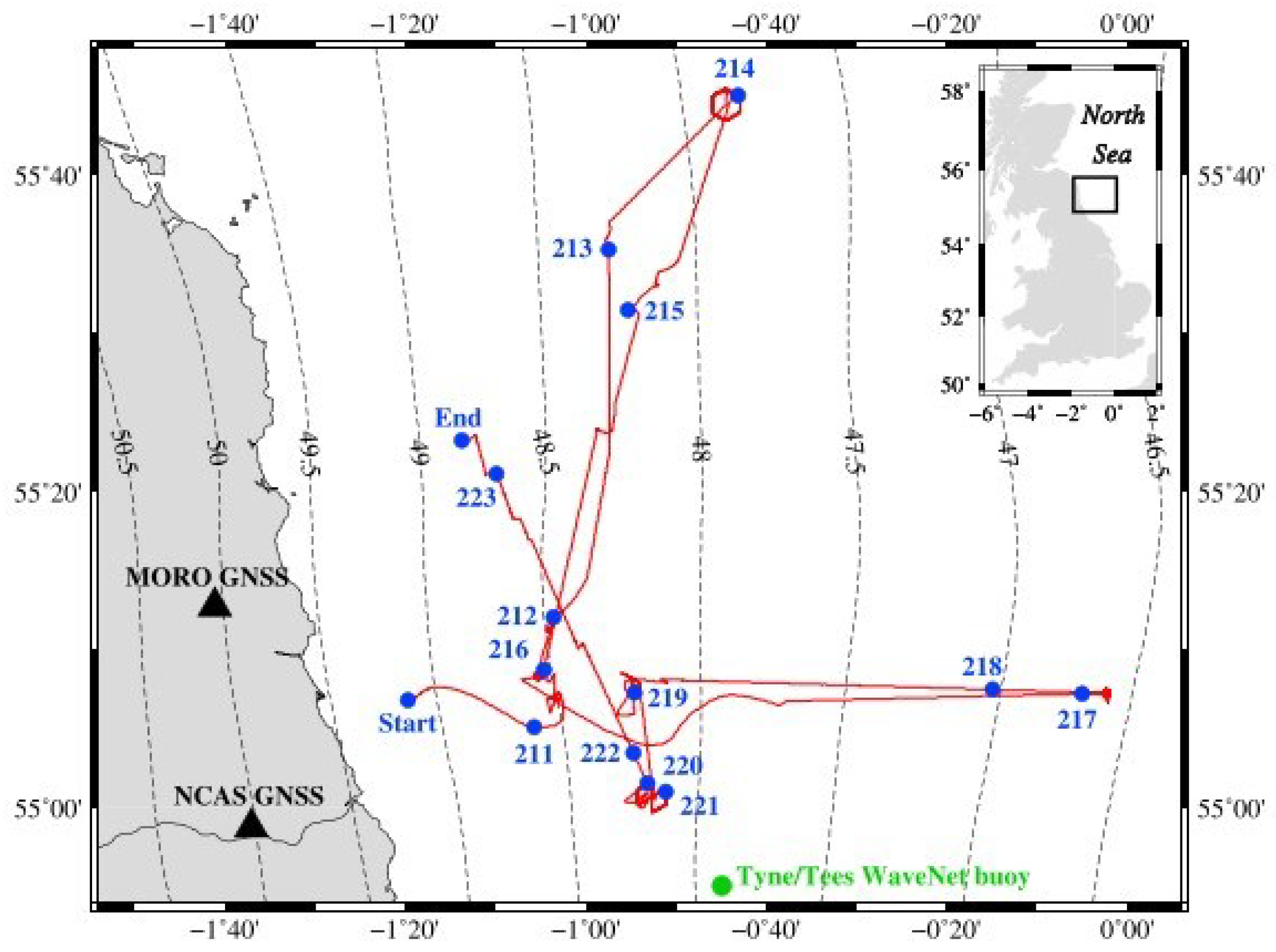
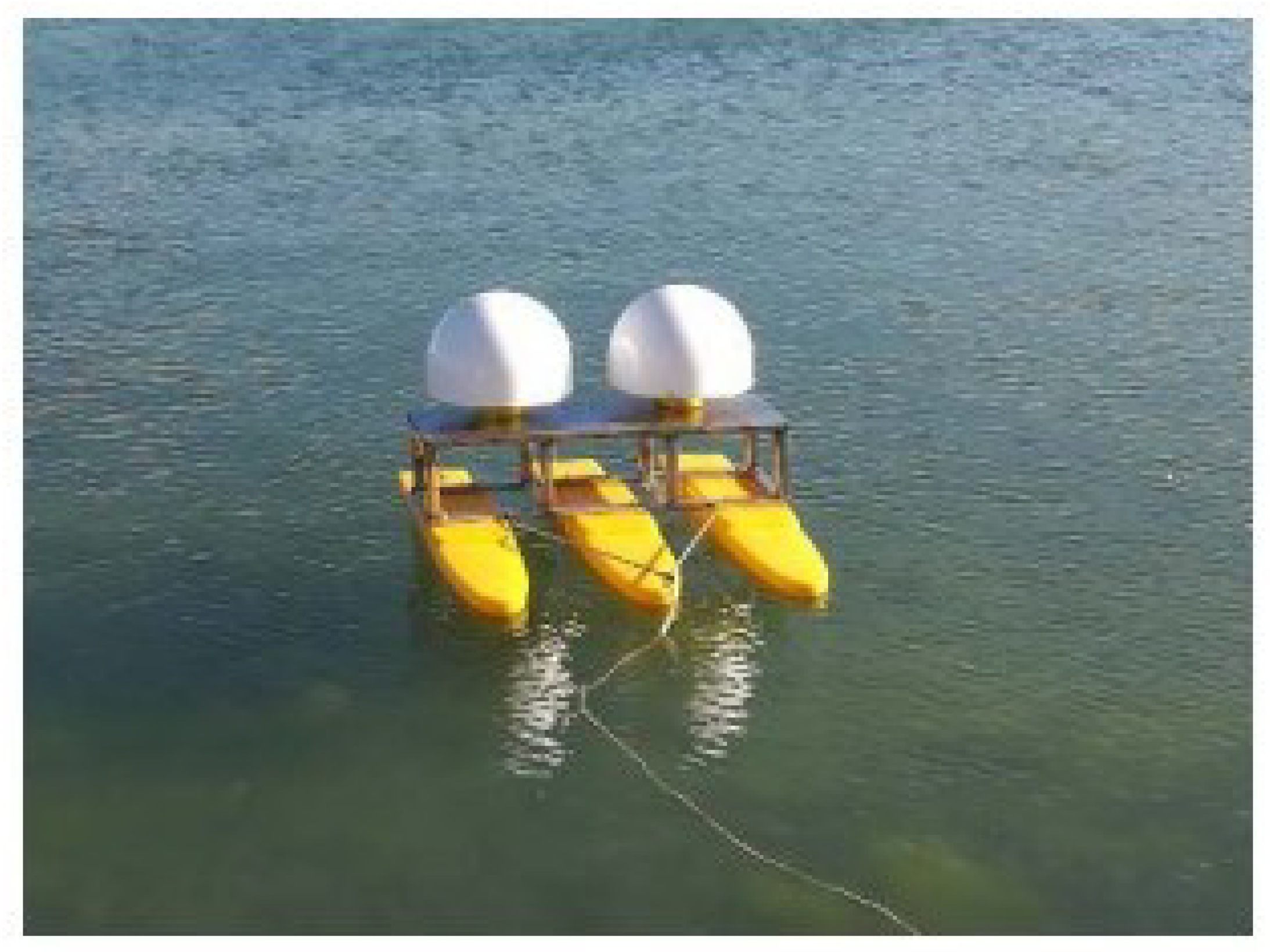
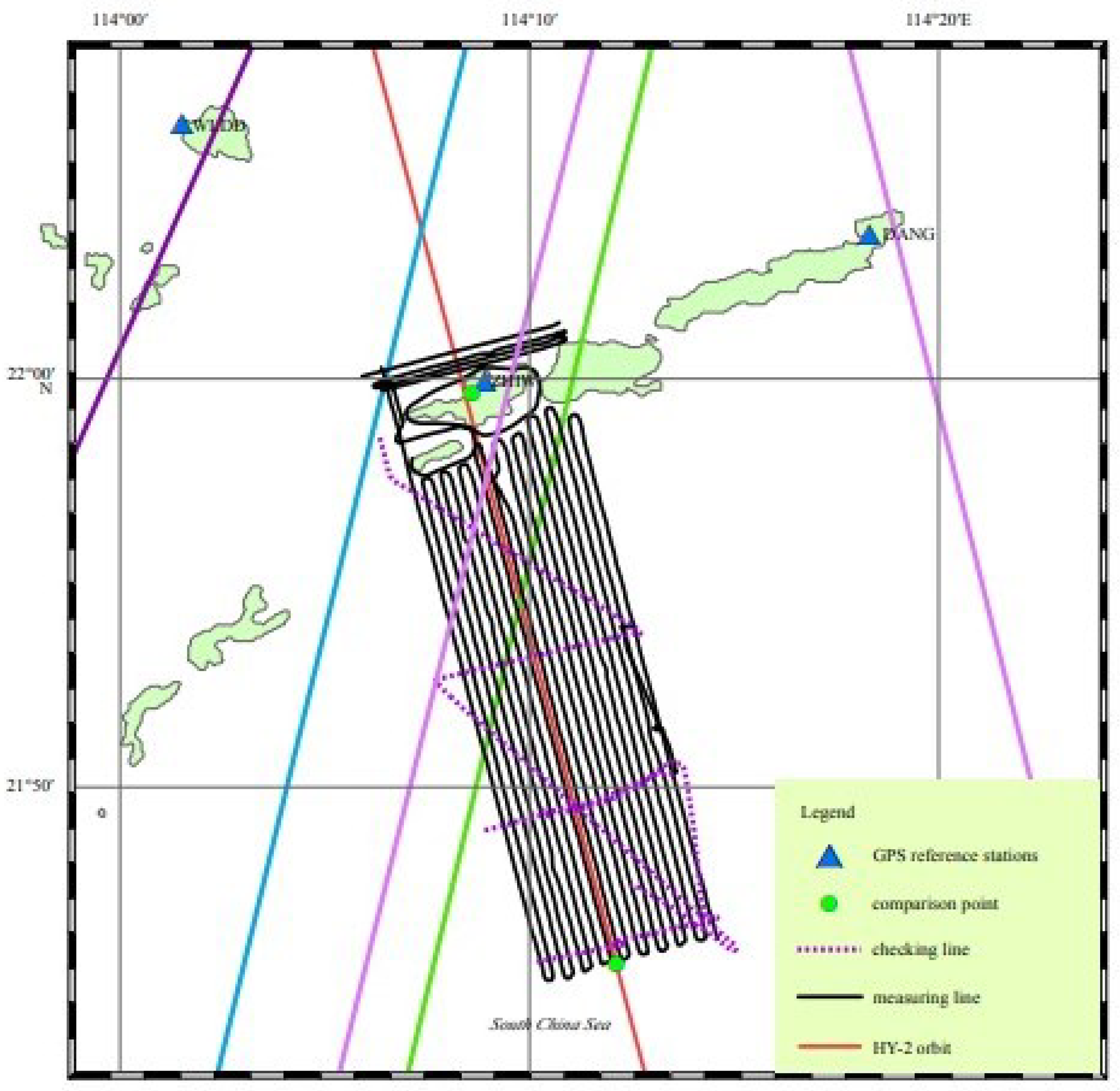
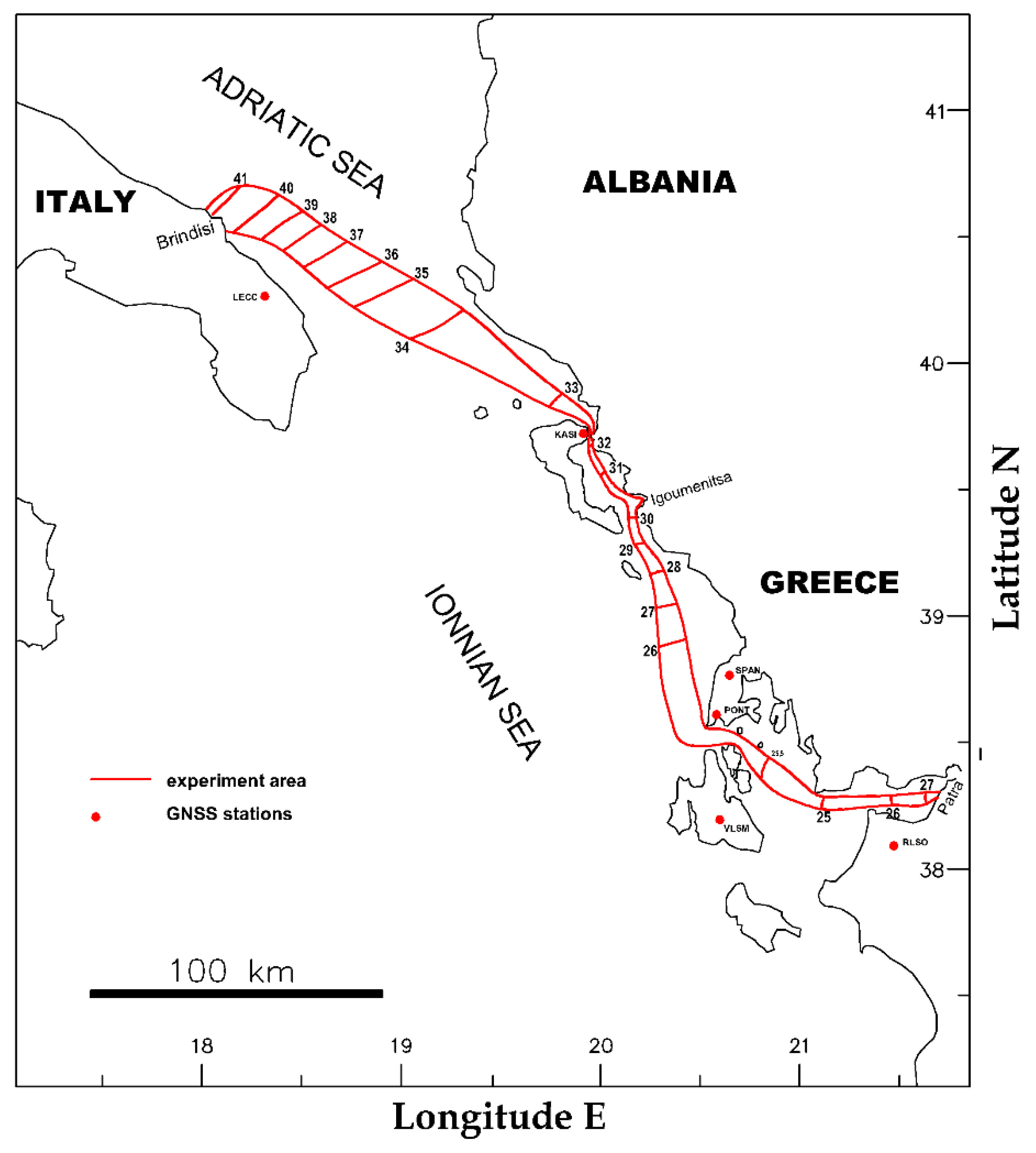
2. Critical Review of the Papers Dealing with the Application of the “GPS/GNSS on Boat” Technique Which Illustrate the Evolution of the Method
3. Final Considerations
4. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Kelecy, T.M.; Born, G.H.; Parke, M.E.; Rocken, C. Precise mean sea level measurements using the Global Positioning System. J. Geophys. Res. Oceans 1994, 99, 7951–7959. [Google Scholar] [CrossRef]
- Key, K.W.; Parke, M.E.; Born, G.H. Mapping the sea surface using a GPS buoy. Mar. Geod. 1998, 21, 67–79. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Ménard, Y.; Orsoni, A.; Jeansou, E.; Born, G. Leveling the sea surface using a GPS-catamaran special issue: Jason-1 calibration/validation. Mar. Geod. 2003, 26, 319–334. [Google Scholar] [CrossRef]
- Rocken, C.; Johnson, J.; Van Hove, T.; Iwabuchi, T. Atmospheric water vapor and geoid measurements in the open ocean with GPS. Geophys. Res. Lett. 2005, 32, L12813. [Google Scholar] [CrossRef] [Green Version]
- Marshall, A.; Denys, P. Water level measurement and tidal datum transfer using high rate GPS buoys. N. Z. Surv. 2009, 299, 24. [Google Scholar]
- Foster, J.H.; Carter, G.S.; Merrifield, M.A. Ship-based measurements of sea surface topography. Geophys. Res. Lett. 2009, 36, L11605. [Google Scholar] [CrossRef]
- Bouin, M.N.; Ballu, V.; Calmant, S.; Boré, J.M.; Folcher, E.; Ammann, J. A kinematic GPS methodology for sea surface mapping, Vanuatu. J. Geod. 2009, 83, 1203–1217. [Google Scholar] [CrossRef]
- Lycourghiotis, S.; Stiros, S. Sea Surface Topography in the Gulf of Patras and the southern Ionia sea using GPS. In Proceedings of the 12th International Congress of the Geological Society of Greece, Patras, Greece, 19–22 May 2010; Volume 43, pp. 1029–1034. [Google Scholar]
- Reinking, J.; Härting, A.; Bastos, L. Determination of sea surface height from moving ships with dynamic corrections. J. Geod. Sci. 2012, 2, 172–187. [Google Scholar] [CrossRef]
- Ocalan, T.; Alkan, R.M. Performance analysis of web-based online precise point positioning (PPP) services for marine applications. J. Arab Inst. Navig. 2013, 29, 24–29. [Google Scholar]
- Alkan, R.M.; Öcalan, T. Usability of the GPS precise point positioning technique in marine applications. J. Navig. 2013, 66, 579–588. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Liu, X.; Chen, Y.; Wang, J.; Li, C. Local normal height connection across sea with ship-borne gravimetry and GNSS techniques. Mar. Geophys. Res. 2014, 35, 141–148. [Google Scholar] [CrossRef]
- Guo, J.; Dong, Z.; Tan, Z.; Liu, X.; Chen, C.; Hwang, C. A crossover adjustment for improving sea surface height mapping from in-situ high rate ship-borne GNSS data using PPP technique. Cont. Shelf Res. 2016, 125, 54–60. [Google Scholar] [CrossRef]
- Morales Maqueda, M.A.; Penna, N.T.; Williams, S.D.P.; Foden, P.R.; Martin, I.; Pugh, J. Water surface height determination with a GPS wave glider: A demonstration in Loch Ness, Scotland. J. Atmos. Ocean. Technol. 2016, 33, 1159–1168. [Google Scholar] [CrossRef] [Green Version]
- Lycourghiotis, S. Developing a GNSS-on-boat based technique to determine the shape of the sea surface. In Proceedings of the 7th International Conference on Experiments/Process/System Modeling/Simulation/Optimization, Athens, Greece, 5–8 July 2017; Volume 1, pp. 113–119. [Google Scholar]
- Lycourghiotis, S. Sea surface topography determination. Comparing two alternative methods at the Gulf of Corinth. In Proceedings of the 7th International Conference on Experiments/Process/System Modeling/Simulation/Optimization, Athens, Greece, 5–8 July 2017; Volume 2, pp. 410–415. [Google Scholar]
- Lycourghiotis, S. Improvements of GNSS–on-boat methodology using a catamaran platform: Application at the gulf of Patras. In Proceedings of the 7th International Conference on Experiments/Process/System Modeling/Simulation/Optimization, Athens, Greece, 5–8 July 2017; Volume 1, pp. 255–261. [Google Scholar]
- Penna, N.T.; Morales Maqueda, M.A.; Martin, I.; Guo, J.; Foden, P.R. Sea surface height measurement using a GNSS wave glider. Geophys. Res. Lett. 2018, 45, 5609–5616. [Google Scholar] [CrossRef]
- Chupin, C.; Ballu, V.; Testut, L.; Tranchant, Y.T.; Calzas, M.; Poirier, E.; Coulombier, T.; Laurain, O.; Bonnefond, P.; Team FOAM Project. Mapping sea surface height using new concepts of kinematic GNSS instruments. Remote Sens. 2020, 12, 2656. [Google Scholar] [CrossRef]
- Wanlin, Z.; Jianhua, Z.; Chaofei, M.; Xiaohui, F.; Longhao, Y.; He, W.; Chuntao, C. Measurement of the sea surface using a GPS towing-body in Wanshan area. Acta Oceanol. Sin. 2020, 39, 123–132. [Google Scholar]
- Lycourghiotis, S. Sea Topography of the Ionian and Adriatic Seas Using Repeated GNSS Measurements. Water 2021, 13, 812. [Google Scholar] [CrossRef]
- Hipkin, R. Modelling the geoid and sea-surface topography in coastal areas. Phys. Chem. Earth Part A Solid Earth Geod. 2000, 25, 9–16. [Google Scholar] [CrossRef]
- Moritz, H. Local Geoid Determination in Mountain Regions; Defense Technical Information Center: Fort Belvoir, VA, USA, 1983. [Google Scholar]
- Soler, T.; Carlson, A.E., Jr.; Evans, A.G. Determination of vertical deflections using the Global Positioning System and geodetic leveling. Geophys. Res. Lett. 1989, 16, 695–698. [Google Scholar] [CrossRef]
- Hirt, C.; Burki, B.; Somieski, A.; Seeber, G.N. Modern determination of vertical deflections using digital zenith cameras. J. Surv. Eng. 2010, 136, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Mogilevsky, E.; Melzer, Y. Determining deflection of the vertical with GPS. In Proceedings of the 7th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1994), Salt Lake City, UT, USA, 20–23 September 1994; pp. 371–374. [Google Scholar]
- Iliffe, J.C.; Ziebart, M.K.; Turner, J.F. A new methodology for incorporating tide gauge data in sea surface topography models. Mar. Geod. 2007, 30, 271–296. [Google Scholar] [CrossRef]
- Kakkuri, J.; Poutanen, M. Geodetic determination of the surface topography of the Baltic Sea. Mar. Geod. 1997, 20, 307–316. [Google Scholar] [CrossRef]
- Bayoud, F.A.; Sideris, M.G. Two different methodologies for geoid determination from ground and airborne gravity data. Geophys. J. Int. 2003, 155, 914–922. [Google Scholar] [CrossRef]
- Novák, P.; Kern, M.; Schwarz, K.P.; Sideris, M.G.; Heck, B.; Ferguson, S.; Hammada, Y.; Wei, M. On geoid determination from airborne gravity. J. Geod. 2003, 76, 510–522. [Google Scholar] [CrossRef]
- Forsberg, R.; Olesen, A.; Bastos, L.; Gidskehaug, A.; Meyer, U.; Timmen, L. Airborne geoid determination. Earth Planets Space 2000, 52, 863–866. [Google Scholar] [CrossRef] [Green Version]
- Forsberg, R.; Olesen, A.V. Airborne gravity field determination. In Sciences of Geodesy—I; Springer: Berlin/Heidelberg, Germany, 2010; pp. 83–104. [Google Scholar]
- Völgyesi, L. Local geoid determination based on gravity gradients. Acta Geod. Geophys. Hung. 2001, 36, 153–162. [Google Scholar] [CrossRef]
- Rapp, R.H. The determination of geoid undulations and gravity anomalies from Seasat altimeter data. J. Geophys. Res. Oceans 1983, 88, 1552–1562. [Google Scholar] [CrossRef]
- Engelis, T. Radial Orbit Error Reduction and Sea Surface Topography Determination Using Satellite Altimetry. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 1987. [Google Scholar]
- Calman, J. Introduction to sea-surface topography from satellite altimetry. Johns Hopkins APL Tech. Dig. 1987, 8, 206–210. [Google Scholar]
- Hwang, C. Orthogonal Functions Over the Oceans and Applications to the Determination of Orbit Error, Geoid and Sea Surface Topography from Satellite Altimetry. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 1991. [Google Scholar]
- Morrow, R.; Fu, L.L.; Ardhuin, F.; Benkiran, M.; Chapron, B.; Cosme, E.; d’Ovidio, F.; Farrar, J.T.; Gille, S.T.; Lapeyre, G.; et al. Global observations of fine-scale ocean surface topography with the Surface Water and Ocean Topography (SWOT) mission. Front. Mar. Sci. 2019, 6, 232. [Google Scholar] [CrossRef]
- Koblinsky, C.J.; Nerem, R.S.; Williamson, R.G.; Klosko, S.M. Global scale variations in sea surface topography determined from satellite altimetry. Sea Level Changes Determ. Eff. Geophys. Monogr. Ser. 1992, 69, 155–165. [Google Scholar]
- Madsen, K.S.; Høyer, J.L.; Tscherning, C.C. Near-coastal satellite altimetry: Sea surface height variability in the North Sea–Baltic Sea area. Geophys. Res. Lett. 2007, 34, 14. [Google Scholar] [CrossRef] [Green Version]
- Sansò, F.; Venuti, G.; Tziavos, I.N.; Vergos, G.S.; Grigoriadis, V.N.; Vergos, G. Geoid and Sea Surface Topography from satellite and ground data in the Mediterranean region—A review and new proposals. Bull. Geod. Geomat. 2008, 67, 155–201. [Google Scholar]
- Fu, L.L.; Stammer, D.; Leben, R.R.; Chelton, D.B. Improved spatial resolution of ocean surface topography from the T/P-Jason-1 altimeter mission. Eos Trans. Am. Geophys. Union 2003, 84, 241–248. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Li, J.; Wang, Z. Determination of global mean sea surface WHU2000 using multi-satellite altimetric data. Chin. Sci. Bull. 2002, 47, 1664–1668. [Google Scholar] [CrossRef]
- Tsaoussi, L.S.; Koblinsky, C.J. An error covariance model for sea surface topography and velocity derived from TOPEX/POSEIDON altimetry. J. Geophys. Res. Oceans 1994, 99, 24669–24683. [Google Scholar] [CrossRef]
- Haines, B.J.; Desai, S.D.; Born, G.H. The harvest experiment: Calibration of the climate data record from TOPEX/Poseidon, Jason-1 and the ocean surface topography mission. Mar. Geod. 2010, 33, 91–113. [Google Scholar] [CrossRef]
- Cocard, M.; Geiger, A.; Kahle, H.G.; Veis, G. Airborne laser altimetry in the Ionian Sea, Greece. Glob. Planet. Change 2002, 34, 87–96. [Google Scholar] [CrossRef]
- Gruno, A.; Liibusk, A.; Ellmann, A.; Oja, T.; Vain, A.; Jürgenson, H. Determining sea surface heights using small footprint airborne laser scanning. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions 2013, Dresden, Germany, 23–26 September 2013; Volume 8888, pp. 178–190. [Google Scholar]
- Varbla, S.; Ellmann, A.; Delpeche-Ellmann, N. Utilizing airborne laser scanning and geoid model for near-coast improvements in sea surface height and marine dynamics. J. Coast. Res. 2020, 95, 1339–1343. [Google Scholar] [CrossRef]
- Connor, L.N.; Laxon, S.W.; Ridout, A.L.; Krabill, W.B.; McAdoo, D.C. Comparison of Envisat radar and airborne laser altimeter measurements over Arctic sea ice. Remote Sens. Environ. 2009, 113, 563–570. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Herring, T.A.; King, R.W.; McClusky, S.C. GAMIT—Reference Manual—GPS Analysis at MIT; Release 10.3; Massachussetts Institute of Technology: Cambridge, MA, USA, 2006; pp. 1–182. [Google Scholar]
- Guo, J.Y.; Yuan, Y.D.; Kong, Q.L.; Li, G.W.; Wang, F.J. Deformation caused by the 2011 eastern Japan great earthquake monitored using the GPS single-epoch precise point positioning technique. Appl. Geophys. 2012, 9, 483–493. [Google Scholar] [CrossRef]
- Matsumoto, K.; Takanezawa, T.; Ooe, M. Ocean tide models developed by assimilating TOPEX/POSEIDON altimeter data into hydrodynamical model: A global model and a regional model around Japan. J. Oceanogr. 2000, 56, 567–581. [Google Scholar] [CrossRef]
- Galani, P.; Lycourghiotis, S.; Kariotou, F. On the determination of a locally optimized Ellipsoidal model of the Geoid surface in sea areas. IOP Conf. Ser. Earth Environ. Sci. 2021, 906, 012036. [Google Scholar] [CrossRef]
- Lycourghiotis, A.; Kordulis, C.; Lycourghiotis, S. Beyond Fossil Fuels: The Return Journey to Renewable Energy; Crete University Press: Herakleion, Greece, 2017; 199p. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Year | Location | GPS/GNSS | Sea GPS/GNSS Platform | Solution | GPS/GNSS Numbers | Accuracy |
|---|---|---|---|---|---|---|---|
| [1] | 1994 | La Jolla, California (USA) | GPS | (1) Spar buoy (2) wave rider buoy | D-GPS/GNSS | 1 | |
| [2] | 1998 | Coast of California (USA) | GPS | Wave rider buoy | |||
| [3] | 2003 | Corsica (France) | GPS | (1) GPS buoy (2) GPS catamaran | D-GPS/GNSS | 2 | 2 cm |
| [4] | 2005 | Caribbean Sea | GPS | GPS on ship | PPP | 1 | ~10 cm |
| [5] | 2009 | New Zealand | GPS | Wave rider buoy | D-GPS/GNSS | 2 | |
| [6] | 2009 | Hawaii Ocean | GPS | research ship | D-GPS/GNSS | 1 | 13.3–16.1 cm |
| [7] | 2009 | Vanuatu | GPS | GPS on ship | D-GPS/GNSS | 1 | 5–15 cm |
| [8] | 2010 | Ionian Sea (Greece) | GPS | GPS on ship | D-GPS/GNSS | 1 | <15 cm |
| [9] | 2012 | Madeira–Tenerife (Atlantic ocean) | GNSS | GNSS on ship | PPP | 1 (+1) | |
| [10] | 2012 | Golden Horn (Turkye) | GPS | GPS on boat | D-GPS/GNSS and PPP | 1 | |
| [11] | 2013 | Golden Horn (Turkye) | GPS | GPS on boat | D-GPS/GNSS and PPP | 1 | |
| [12] | 2014 | Shandong (China) | GNSS | GNSS on boat | PPP | 1 | 3.5–5 cm |
| [13] | 2016 | Taiwan Strait (Taiwan) | GNSS | GNSS on boat | PPP | 1 | 12.9 cm |
| [14] | 2016 | Loch Ness (Scotland) | GPS | Wave glider | D-GPS/GNSS) and PPP | 1 | 5 cm |
| [15] | 2017 | (Greece) | GNSS | GPS/GNSS on ship | D-GPS/GNSS and PPP | 1 to 4 | |
| [16] | 2017 | Corinthian gulf (Greece) | GNSS | GNSS on boat | D-GPS/GNSS and PPP | 3.67 | |
| [17] | 2017 | Patras gulf (Greece) | GNSS | GNSS on catamaran platform | D-GPS/GNSS and PPP | 4 | 5.43 |
| [18] | 2018 | North Sea (UK) | GNSS | GNSS on self-propelled wave glider | PPP | 1 | 5–6 cm |
| [19] | 2020 | Pertuis (France) and Noumea (N. Caledonia) | GNSS | GNSS floating carpet + unmanned surface vehicle | D-GPS/GNSS and PPP | 1 | no |
| [20] | 2020 | Zhiwan Island (South China Sea) | GPS | GNSS on trimaran boat | D-GPS/GNSS | 2 | 1.5–4.0 cm |
| [21] | 2021 | Andriatic Sea | GNSS | GNSS on passenger ship | D-GPS/GNSS and PPP | 1 | 3.31 cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lycourghiotis, S.; Kariotou, F. Τhe “GPS/GNSS on Boat” Technique for the Determination of the Sea Surface Topography and Geoid: A Critical Review. Coasts 2022, 2, 323-340. https://doi.org/10.3390/coasts2040016
Lycourghiotis S, Kariotou F. Τhe “GPS/GNSS on Boat” Technique for the Determination of the Sea Surface Topography and Geoid: A Critical Review. Coasts. 2022; 2(4):323-340. https://doi.org/10.3390/coasts2040016
Chicago/Turabian StyleLycourghiotis, Sotiris, and Foteini Kariotou. 2022. "Τhe “GPS/GNSS on Boat” Technique for the Determination of the Sea Surface Topography and Geoid: A Critical Review" Coasts 2, no. 4: 323-340. https://doi.org/10.3390/coasts2040016
APA StyleLycourghiotis, S., & Kariotou, F. (2022). Τhe “GPS/GNSS on Boat” Technique for the Determination of the Sea Surface Topography and Geoid: A Critical Review. Coasts, 2(4), 323-340. https://doi.org/10.3390/coasts2040016