1. Introduction
Nikola Tesla receives credit for inventing Alternating Current (AC) systems, which enabled global electricity. Since then, the AC grid’s economic and environmental performances have been virtually faultless. The power system must produce enough electricity to meet demand regardless of weather or other disturbances. The system comprises several electrical components, including generators, control loops, transmission lines, and safety switches. Furthermore, because a continuous power supply is essential in the modern period, studying power generation as having a renewable energy source is extremely challenging. The network is separated into multiple “control zones” under this configuration, each of which may be thought of as a separate “generation ” [
1]. Frequency and interchange tie-line power will deviate from their normal range if the loading state of any control region suddenly changes or if there are transients in the renewable energy source(s). Balancing load generation, schedule, and tie-line power is crucial to keep the entire power system running smoothly. Load Frequency Control (LFC) was developed to prepare for this eventuality. To effectively manage demand and disruption [
2], LFC works to keep the system’s frequency and tie-line power within a specified range. The LFC is used first to meet a region’s load requirements and eliminate frequency variance. Maintaining tight controls over the system’s frequency fluctuations is crucial. This is due to the following factors: Since the primary magnetic flux is fluctuating, the speed of AC motors is affected, turbine blades can be damaged, and the transformer winding can overheat. Where needed, keeping the power frequency and voltage depends heavily on the LFC [
3].
Many approaches and control structures have been created in recent years, demonstrating efficiency, optimality, and robustness. Controllers are selected according to the desired characteristics. The Proportional–Integral–Directive (PID) controller is standard and well-adopted. This controller has devised variations to accomplish preferences of optimal qualities; they include internal model control (IMC), PI-PD structures, and I-PD models. Nonetheless, a two-parameter framework such as PI control can achieve a satisfactory steady-state response. Parameter optimization, on the other hand, is essential. While numerous concepts were utilized in published works, the development of the meta-heuristic algorithm and its subsequent widespread adoption in the scientific community is a notable exception. Integer-order controllers have done reasonably well, but they can always be better. In the recent decade, control engineering has increasingly used fractional calculus, leading to fractional-order proportional–integral–derivative (FOPID) controllers. The most recent and relevant literature was meticulously researched for this investigation. The following section provides an illustrated literature review on LFC and AVR to help readers comprehend the study’s impetus.
Recent, extensive efforts have been made to guarantee the improved performance of the power system under both normal and perturbed situations. The development of LFC tactics requires constant vigilance. The literature published within the last six years was evaluated for this assessment to emphasize more current works. Some researchers have found more optimal parameter tweaking, while others have redesigned the controller from the ground up. In these investigations, control engineers have frequently used meta-heuristic methods for fine-tuning. In this article, we have examined the LFC of multiple regional power grids. In [
4,
5], integer-order PI was obtained using the slime mould algorithm (SMA) and firefly algorithm, respectively, for two-area hybrid power systems, namely PV and RTG. A modified whale optimization algorithm (WOA) was used for PID [
3]. The same method was used for exploring optimum and practical solutions in [
6]. To fine-tune the controller parameters, the optimization technique is applied individually to a two-area thermal power plant and a two-area hydro-thermal-gas power plant with an AC-DC tie-line. Then, the chaotic crow search algorithm was applied to tune nine controllers in a hybrid energy-distributed power system and hydro-thermal [
7]. These nine controllers include PI, PIDF, PID, 2DOF-PID, 3DOF-PID, FOPID, CC-PI-PID, tilt–integral–derivative (TID) and CC-TID. Similarly, the opposition-based volleyball premier league algorithm was recently used to tune LFC controllers in multi-area systems with IES-based modified HVDC tie-line and electric vehicles [
8]. However, a controller has many tuning parameters, namely, CC-2DOF (PI)-PDF. Similarly, the super-twisting algorithm [
9], bacterial foraging optimization technique [
10], firefly algorithm [
11,
12], quasi oppositional harmony search algorithm [
13], and ant colony algorithm [
14] have been adopted for various variants of PIDs or hybrid fuzzy-PIDs.
A simple but effective form of closed-loop control is a two-degrees-of-freedom (2DoF) structure and has proven quite helpful for the AVR [
15]. Recently, FOPID and TID controllers with 2DoF were tested in a two-area power system composed of a wind turbine generator and redox flow battery [
16]. Another 2DoF scheme for a four-area system was found in [
17]. A well-known FOPID [
18] and fractional fuzzy PID for multi-source power system [
19] were presented for better results. A 3-DoF TID control [
1] has been utilized for two, three, four, and five area systems. The FO control strategy with theorems to back has been shown in [
20], utilising reduced-order modeling via IMC and CRONE principles for single and two-area systems. Moreover, a simple FOPI tuning was easy to apply for any order system model [
21,
22]. Recently, a study presented a method to handle the virtual inertia within inter-connected power systems via FOPI [
23]. Furthermore, an integral tilt derivative with filter (ITDF) control scheme was presented for frequency regulation in a multi-microgrid [
24] recently. Similarly, the filter with PID was applied in a marine microgrid integrated with a renewable energy source in [
25].
For the same LFC design problem, some researchers have opted fuzzy logic to bring in a change of control. In [
26], the LFC has been used via type-2 fuzzy for a multi-area power system. In addition, a type-2 fuzzy with PID was used for two-area networks by [
27,
28]. The LFC problem was also seen in smart grids [
29] using fuzzy logic and genetic algorithm. A hybrid fuzzy with the neural network was proposed for a two-area interconnected power system with an extra static synchronous series compensator and PID [
30]. In addition, a PID with fuzzy in two and three areas of thermal, hydro and gas turbine power plants has been discussed in [
31,
32]. It has also been noticed that the two-input one-output Mamdani type fuzzy PID controller might be effective when many energy sources are used, particularly in a one-area network [
33]. It is also shown the modern control strategy can deal with coupling-type complications in hybrid renewable power systems [
34]. Adding filters to controllers has shown exceptional results, for example, in works presented using PID with filter [
3], multi-stage fuzzy PID [
35], TID with filter [
24,
36]. After a comprehensive literature study, the main motivations of our work are summarized briefly below.
1.1. Motivation from Literature
According to the research, the most common controller is PID, PI-PD, or cascade PID, owing to their simple designs. However, the extensive tuning options of some controllers can slow down or complicate the optimization process. In some cases, the disturbance and dynamic load fluctuations are insufficient. According to reviews, unified LFC analyses of a reheated thermal generator with all non-linearities such as a generation rate constraint (GRC), governor dead band (GDB), and a PV system have not yet been achieved, necessitating more research. Modern fractional-order approaches can occasionally exceed the previous methods [
37,
38]. Due to the intricacy and efficiency of the tuning, even if there are fewer tuning parameters, a robust structure such as PI is still necessary. According to the literature review, the outcome of the LFC system is heavily influenced by the controller configuration and the technique used for selecting and tuning the controller parameters. It is worth noting that RTG-RTG is the most extensively interconnected system, while PV-RTG is rather unusual. Since the PV-RTG type is the most challenging, we chose such hybrid power generators to explore in this paper. The dual-performance metrics are designed to fulfil the WOA optimization technique [
39]. We tested with WOA-tuned parameters because of their great convergence speed and accuracy in solving tuning challenges. The simulation findings show that the proposed methods efficiently reduce the frequency and tie-power deviations compared to the classical PI-tuned using the same and other meta-heuristic algorithms.
1.2. Major Contributions
The key contributions to the present work are listed below.
A focused review is discussed to determine interconnected systems’ types. It can be helpful to see the various control schemes with the LFC method.
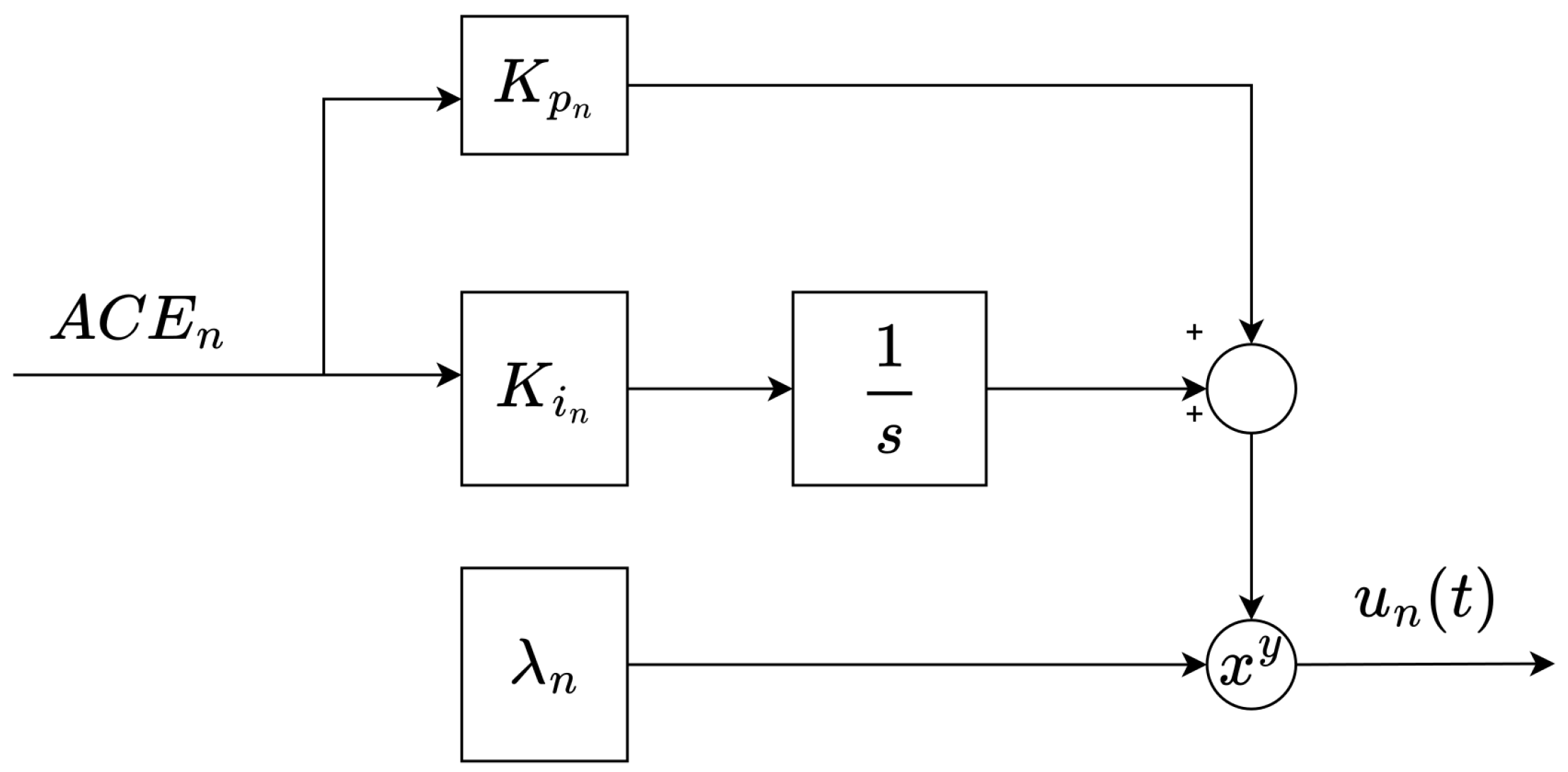
In contrast to the complicated and big parameter type controllers, a novel tri-parametric fractional-order controller, full-order FO[PI] is provided to demonstrate the advantages over current approaches, i.e., [
3,
4,
5].
To do this, we create a novel dual-performance index.
Despite power system nonlinearities, including GRC and GDB, the suggested structure maintains a high level of reliability.
A modern controller can mitigate the effects of both major changes in system parameters and communication time delay (CTD).
Finally, the rest of the paper is organised as follows.
Section 2 describes the power system models simulated in this work. Then,
Section 3 concentrates on the design of the proposed scheme. The various investigations are presented in
Section 4. Finally, the conclusion is derived under
Section 5.
2. PV-RTG Interconnected Hybrid System
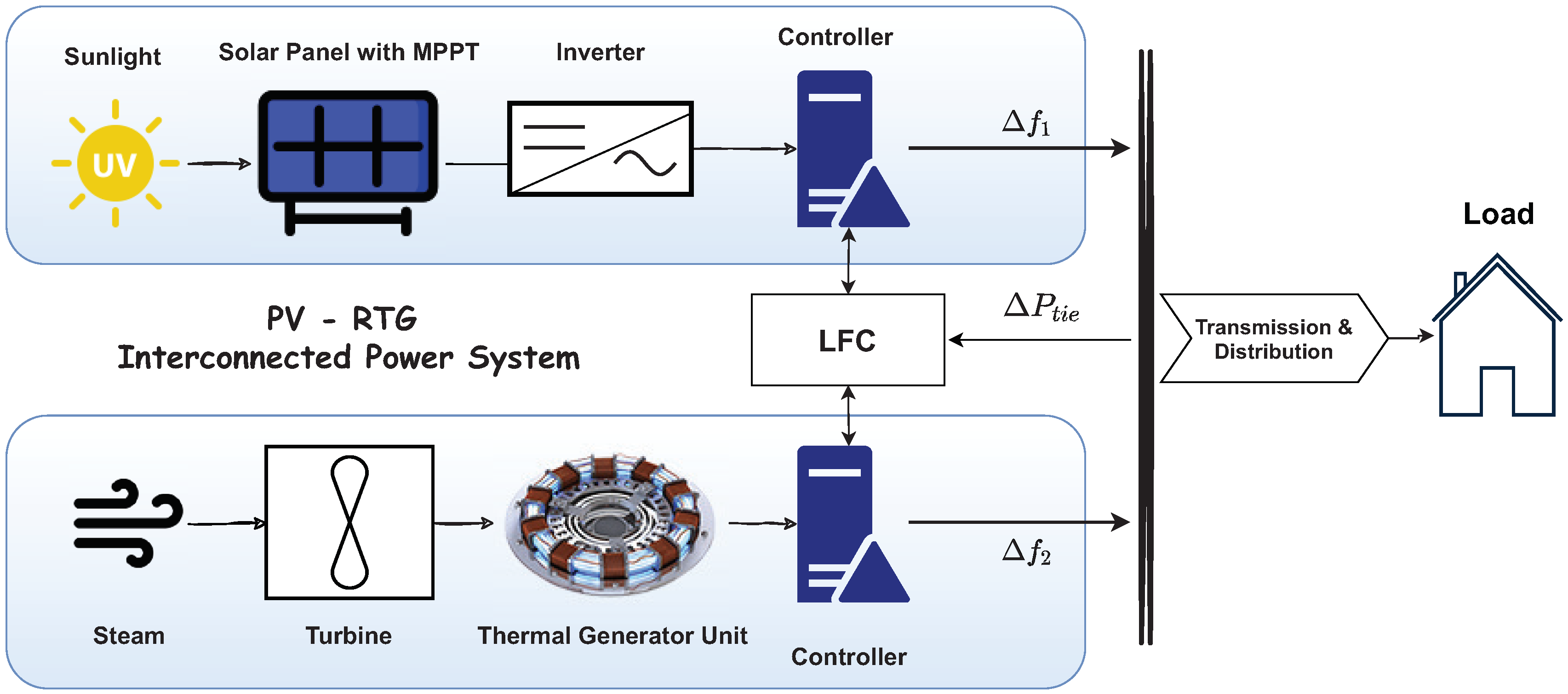
Let us take an application example per the Fiji Islands’ power system architecture. The current real power output is around 112 MW with diesel generators [
40]. An alternative can be a hybrid power system to ensure a smooth transition to a renewable energy source, as shown in
Figure 1. The first area comprises a solar PV grid of around 50 MW with a high-power solar farm. A second area is a reheated thermal generator having a power output of 62 MW. The voltage output is 240 kV with a frequency of 50 Hz.
The actual description of the power system is difficult and useless for the simulation study due to its nonlinear, time-varying character. Since LFC analysis is based on small-signal modelling, it is necessary to examine a linearly approximated model of the actual power system, as shown in
Figure 2. Further study was found in the literature on various control strategies of PV farms to support grid frequency. These controls include synthetic inertia, governor, and AGC control. These approaches were applied to the high PV model effectively [
41]. However, the interconnected PV-RTG power system helps to create grid inertia in frequency control in our case. It could be interesting to study the impact of different parameters in PV inertia control and their correlation and impact on frequency response in the future.
From the literature, it has been noted that most presented works have been focused on interconnected power systems having thermal, hydro, and gas. Very little work has been conducted on a hybrid power system combined with PV [
3]. The power frequency deviation (
) and the tie-line power deviation (
) must return to their rated values during load variations in any area. Therefore, a synthesized measure called area control error (ACE) is used with an LFC as the feedback variable. For the case of two types of power system, each
denotes the
nth system (
). In particular, they are defined as below.
The tie-line power deviation from the tie-line exchange power can be calculated as
where
is the tie-line synchronizing coefficient (p.u MW/radian) between PV and RTG measuring the stiffness of the connection and the unit of
is p.u MW. Now for the interconnected power systems, decentralized controllers
and
can be synthesized on the assumption of
, as
[
20]. Thus, the generalized transfer function for the RTG control area can be written below.
where
,
,
, and
are the transfer functions of the governor, turbine, re-heater, and the generator power systems, respectively. It is noted that this is a generalized transfer function for the scenario when only the thermal system is connected in an interconnected power system. For the chosen work, the scenario is altered with the addition of solar PV. The following subsections discuss the mathematical modeling of each system.
2.1. PV System Model
The PV cell model consists of a current source directly proportional to PV array intensity in parallel with a diode and small series contact resistance. The station has an active power rating of 50 MW and comprises 250 PV panels, each with a capacity of 200 KW, according to [
42]. The system configuration consists of 50 shunt threads with 5 series panels in each thread. The maximum power point tracking (MPPT) stage and the inverter stage comprise the PV–grid interface. The major goal of the first stage is to ensure that the PV power station operates at peak efficiency using MPPT. The inverter’s primary function is to regulate the power flow between the PV system and the grid. The full mathematical modeling can be found in [
5]. Two factors that affect the energy attained from the solar panel are irradiation and temperature. The MPPT algorithm is implemented to achieve maximum efficiency of the PV system. A PV cell is generally shown with current–voltage and power–voltage characteristic curves to understand the effects of temperature and irradiation. Equation (
5) gives the total transfer function of the PV system, which includes the PV panel, inverter, MPPT, and filter. The values considered are given in
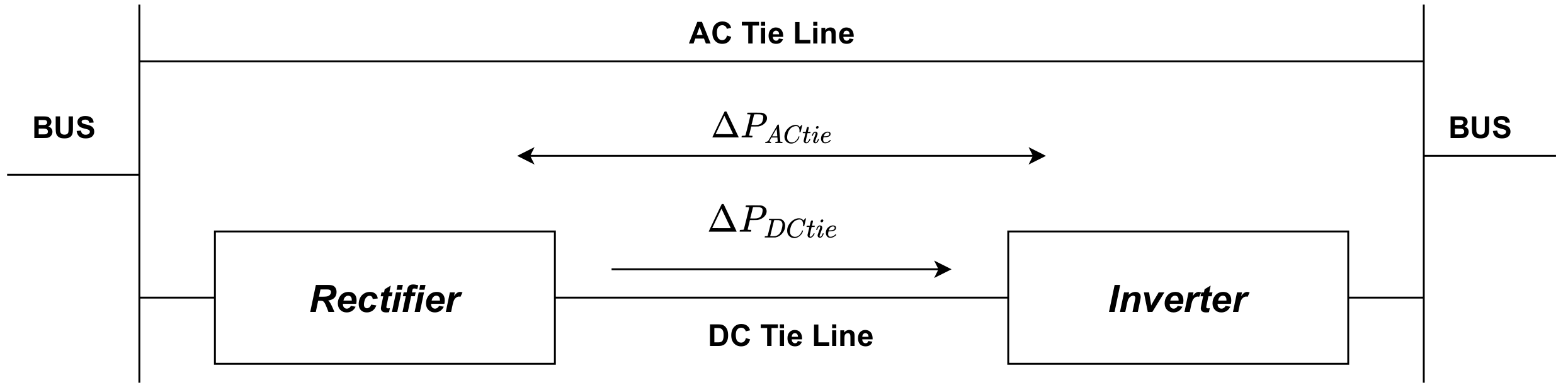
Table 1. The systems are interconnected via AC tie-line in parallel with HVDC link as shown in
Figure 3.
2.2. Thermal System Model
A thermal system consists of a governor, re-heater, turbine, and generator unit. The transfer function equations from (
6) to (
9) are shown below for each unit.
The values of gains and time constants of each component are listed in
Table 1.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}