

Novel Machine-Learning-Based Stall Delay Correction Model for Improving Blade Element Momentum Analysis in Wind Turbine Performance Prediction

 , ,
, ,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction

- A synopsis of the stall delay mechanism;
- A synopsis of the Blade Element Momentum theory and Inverse BEM theory;
- A brief description of existing correction models for stall delay used in BEM;
- Description of the NREL Phase VI turbine and MEXICO rotor experiments;
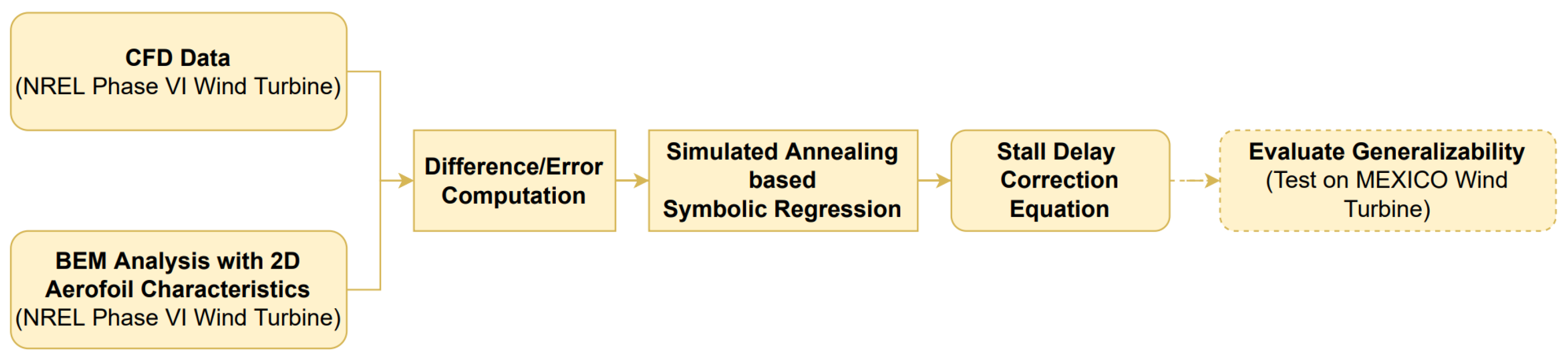
- Proposed new models;
- Results comparison to NREL Phase VI turbine and MEXICO rotor data, followed by discussion.
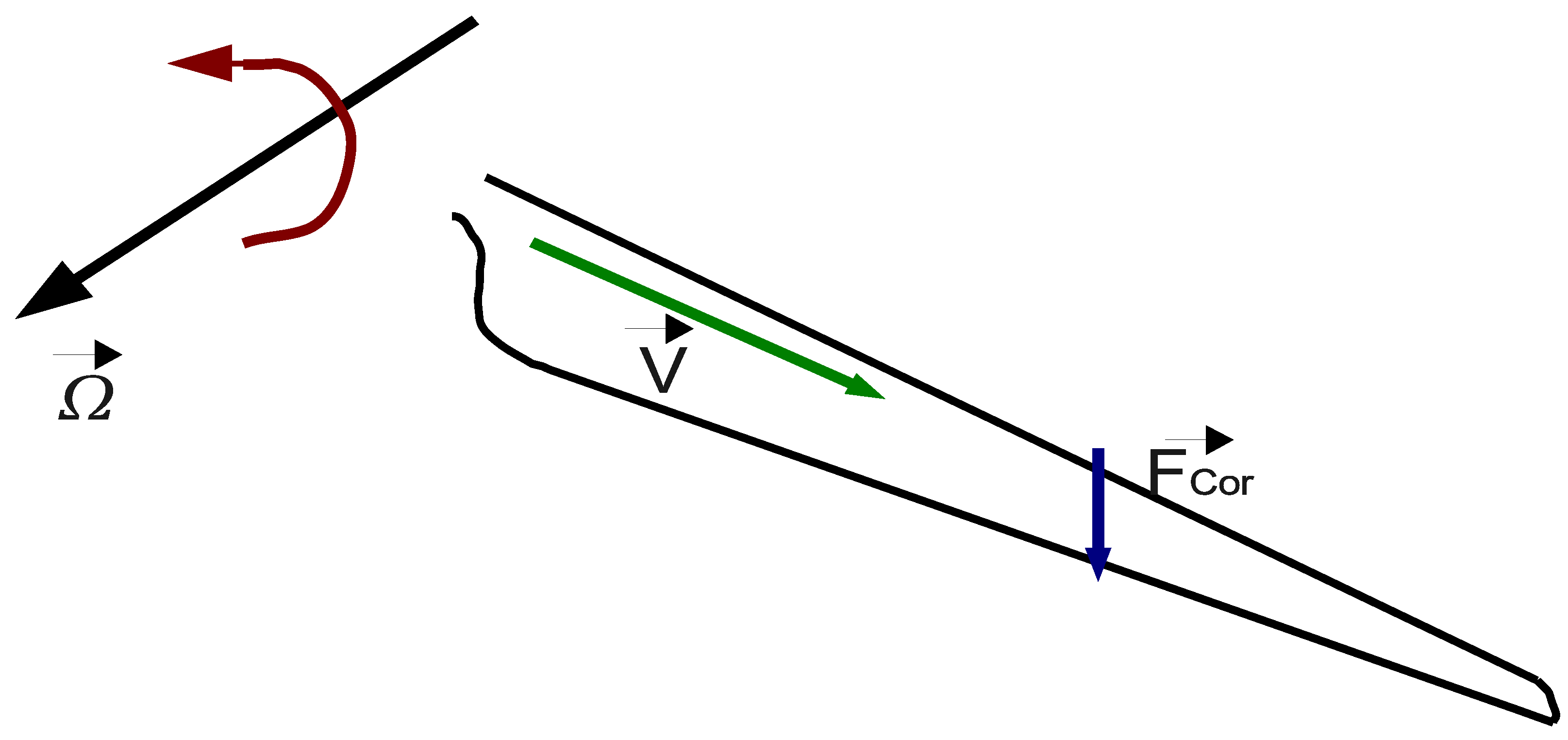
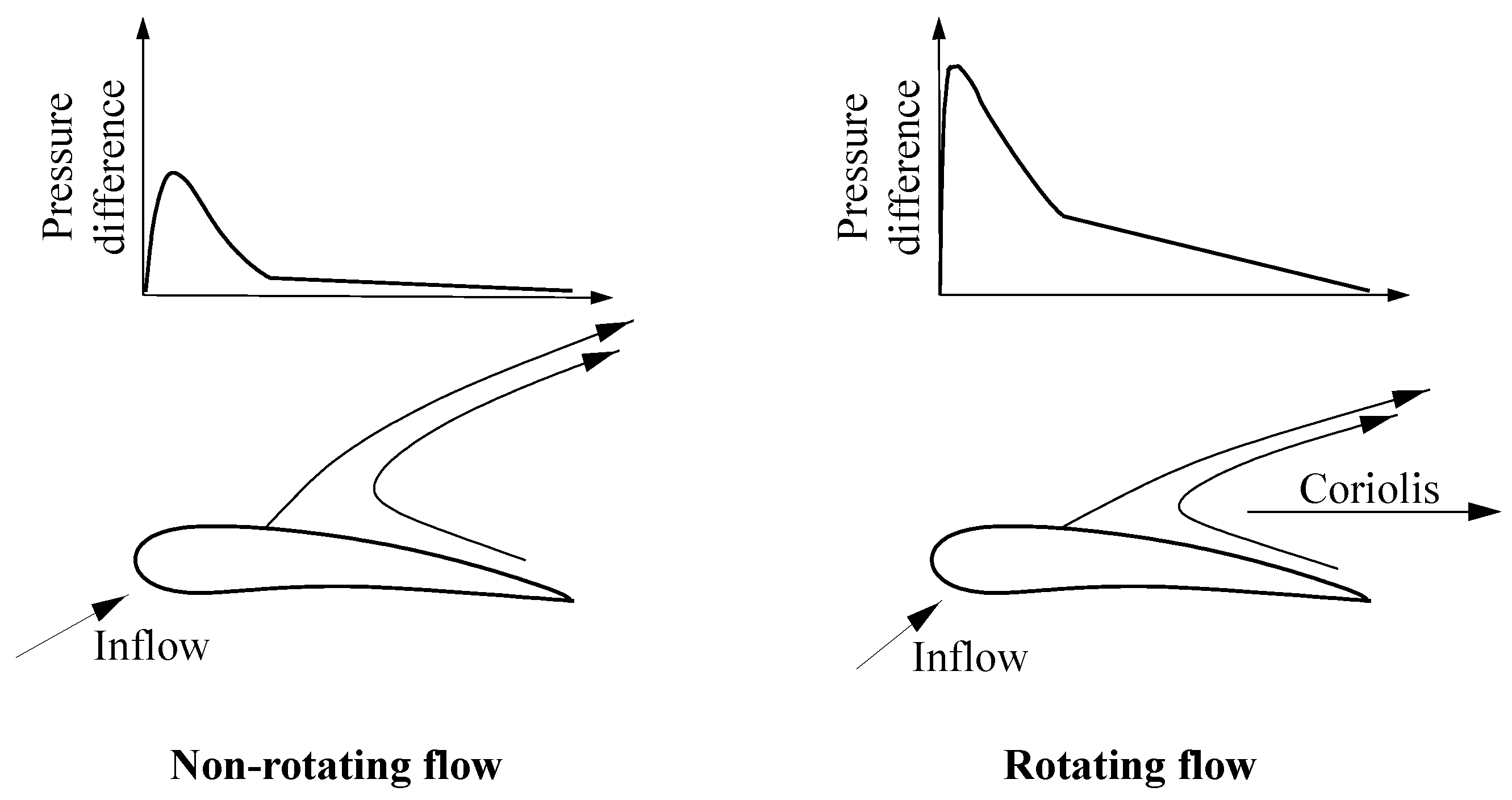
2. Stall Delay Mechanism
3. Blade Element Momentum Theory and Inverse BEM Theory
3.1. Blade Element Momentum Theory
3.2. Inverse Blade Element Momentum Theory
4. Models for Stall Delay Correction in BEM Technique
4.1. Lindenburg [9]
4.2. Dumitrescu and Cardos [42,43,44]
4.3. Hamlaoui, Smaili and Fellouah Model [45]
5. Description of Experiments of NREL Phase VI Turbine and MEXICO Rotor
5.1. NREL Phase VI Turbine Experiment
5.2. MEXICO Experiment
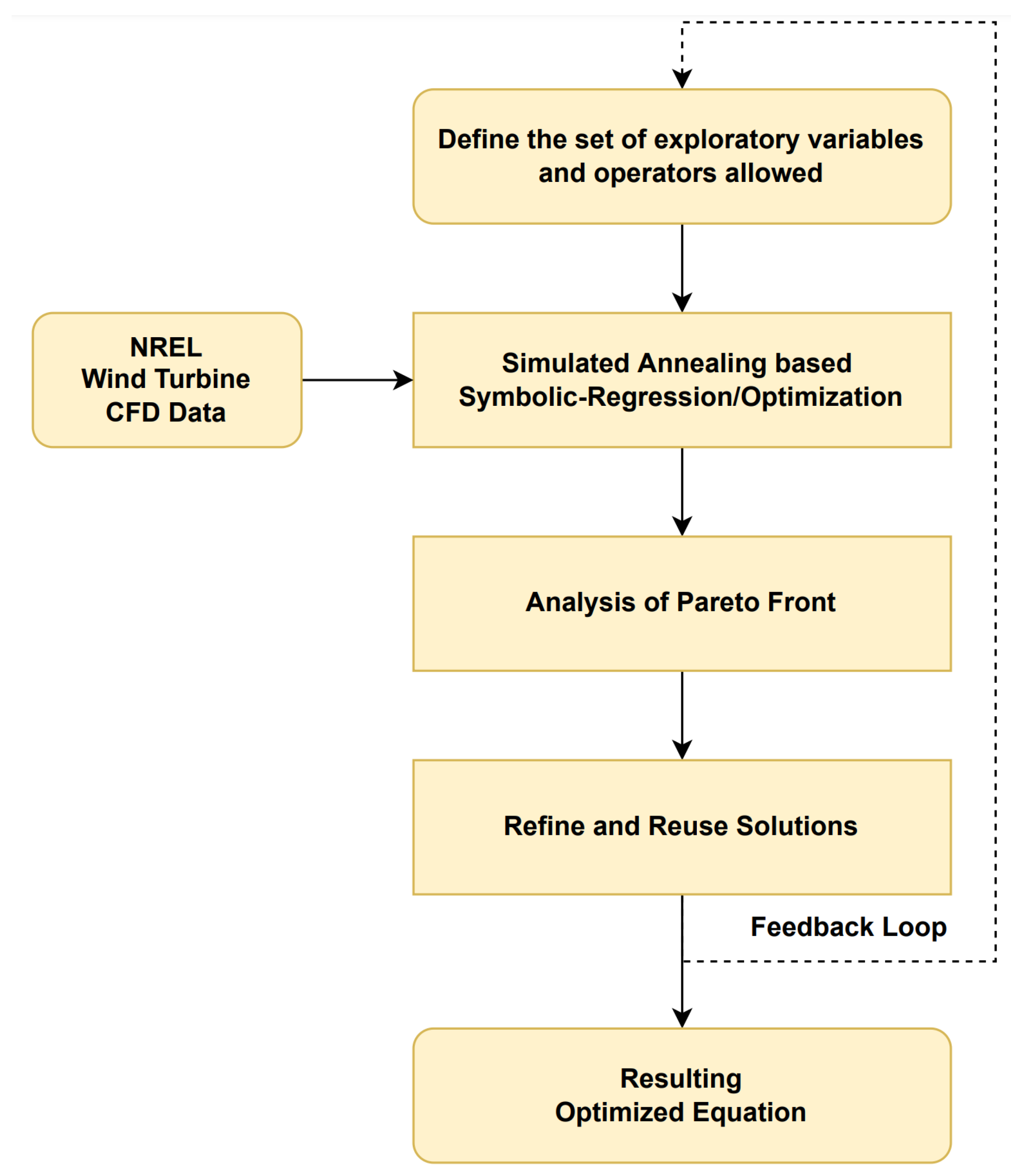
6. Symbolic Regression
6.1. Dataset
6.2. Model Evaluation
7. New Empirical Model for Stall Delay
8. Results and Discussions
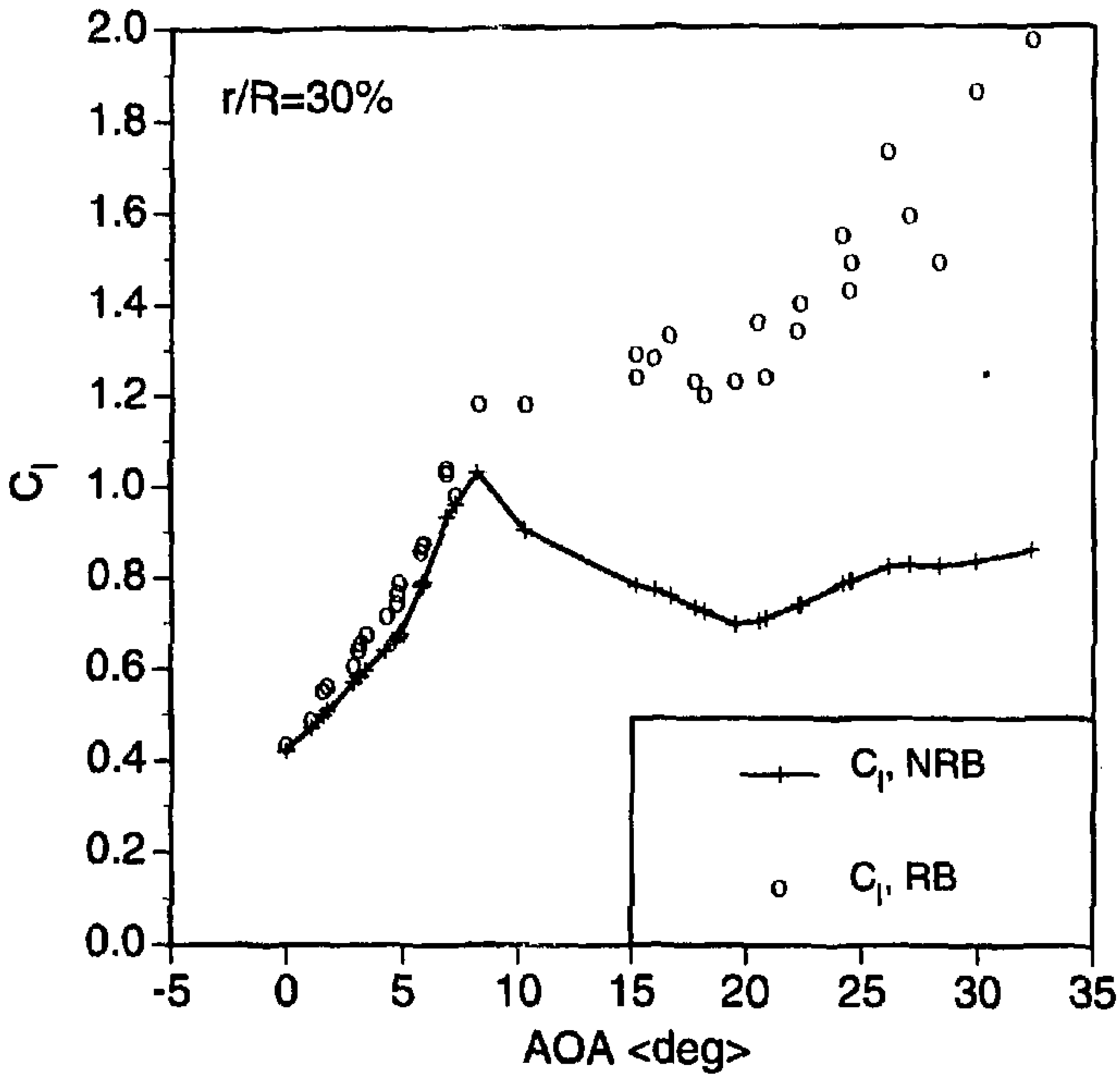
8.1. 3D Aerodynamic Characteristics
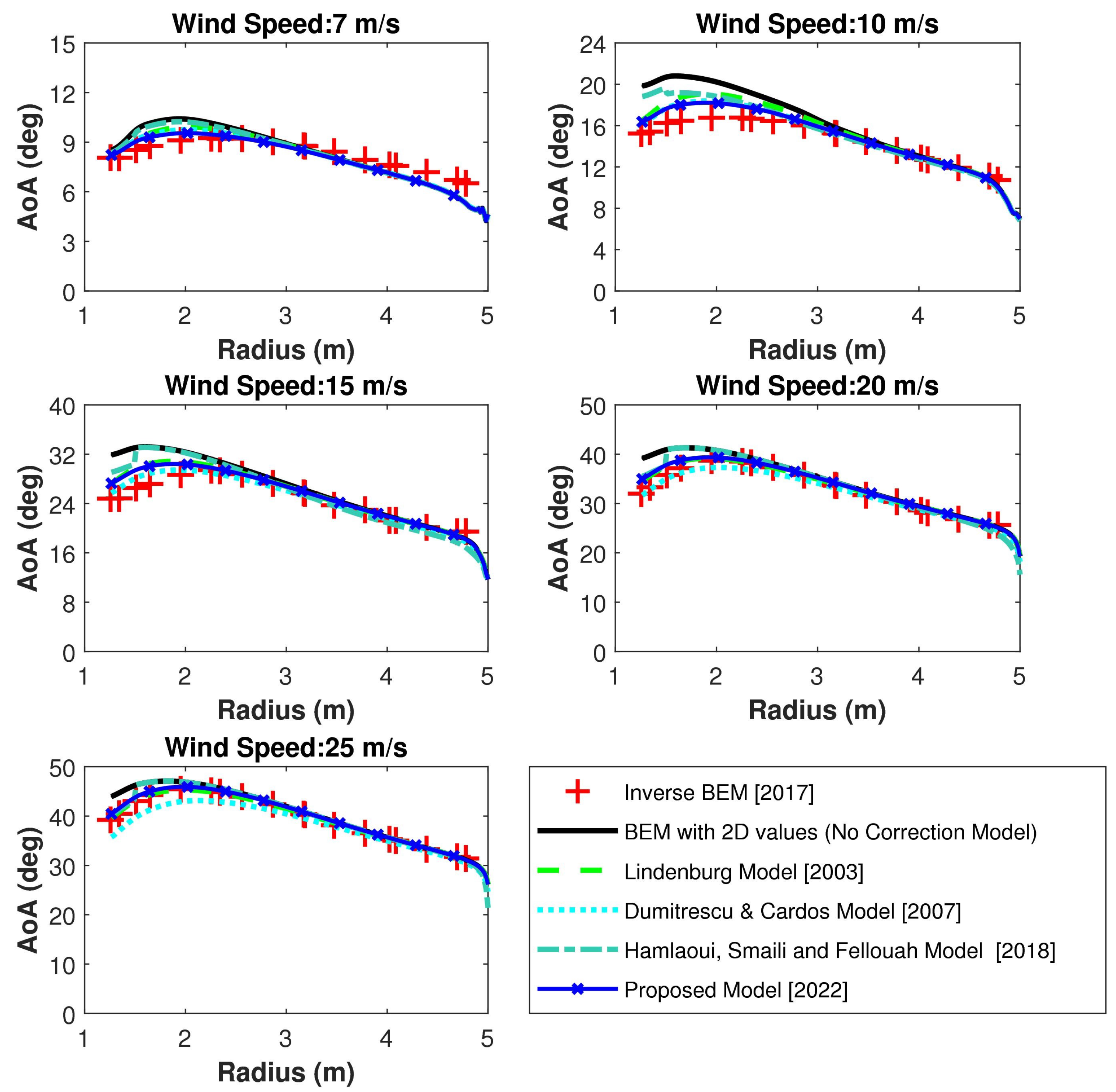
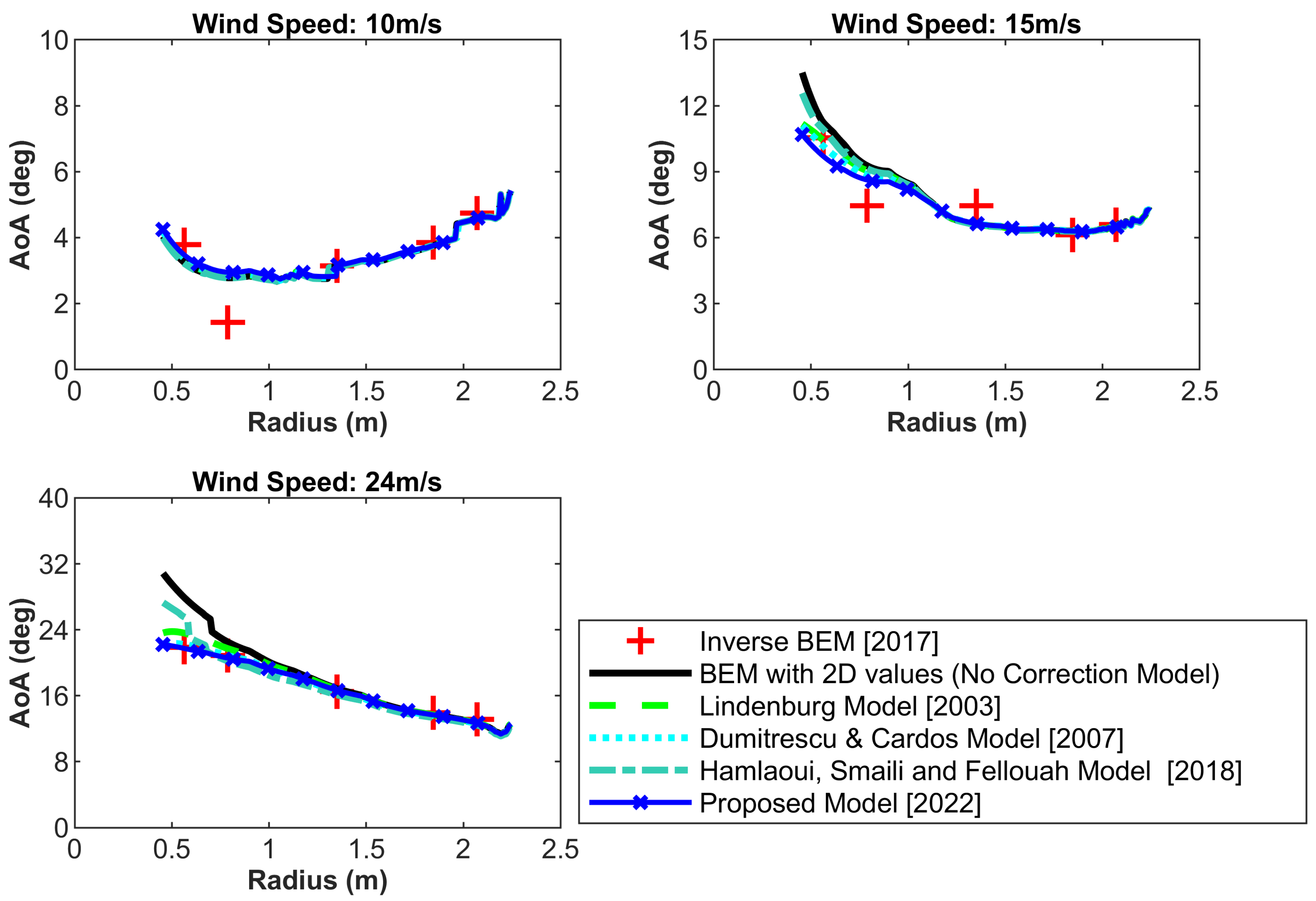
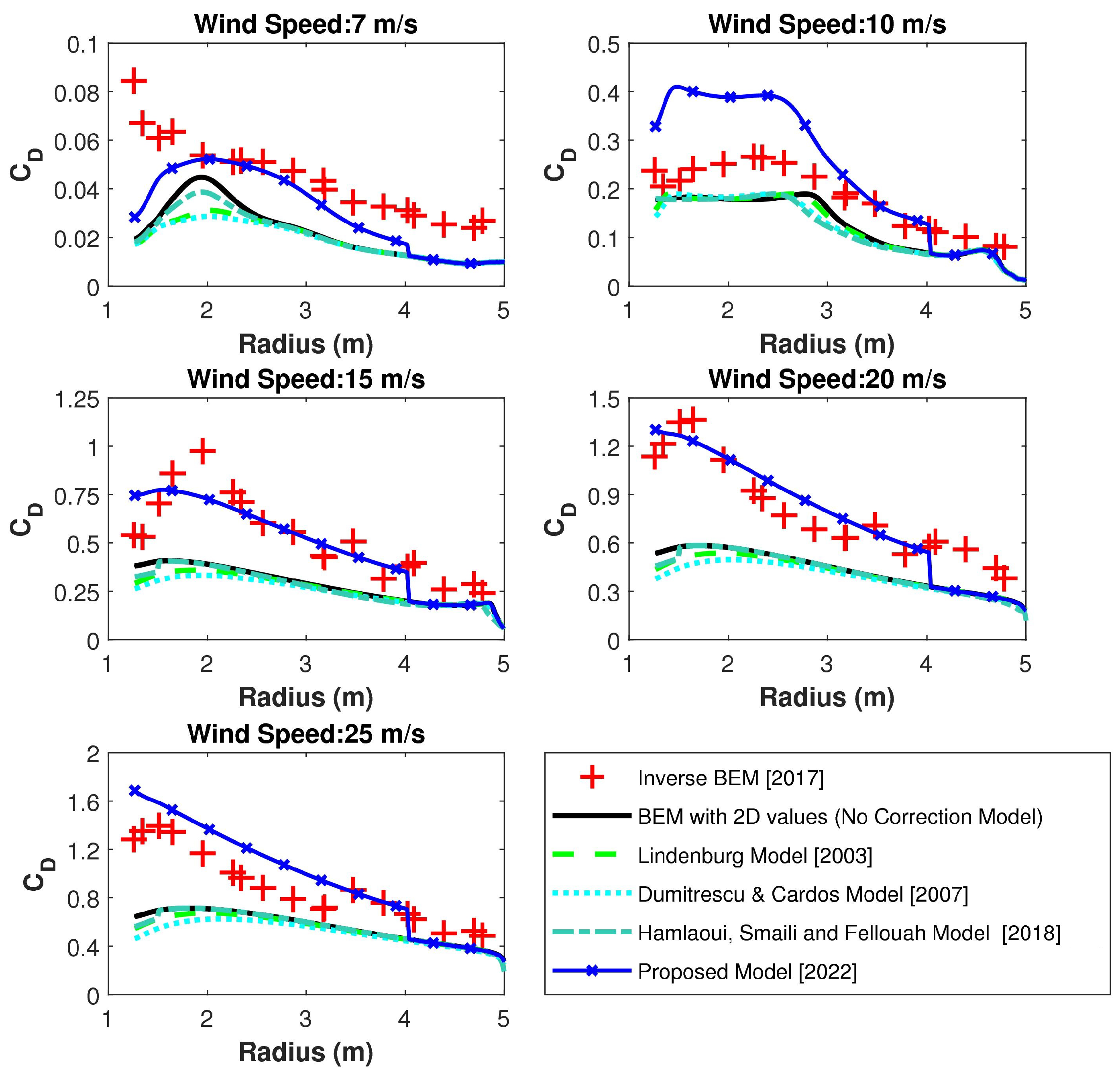
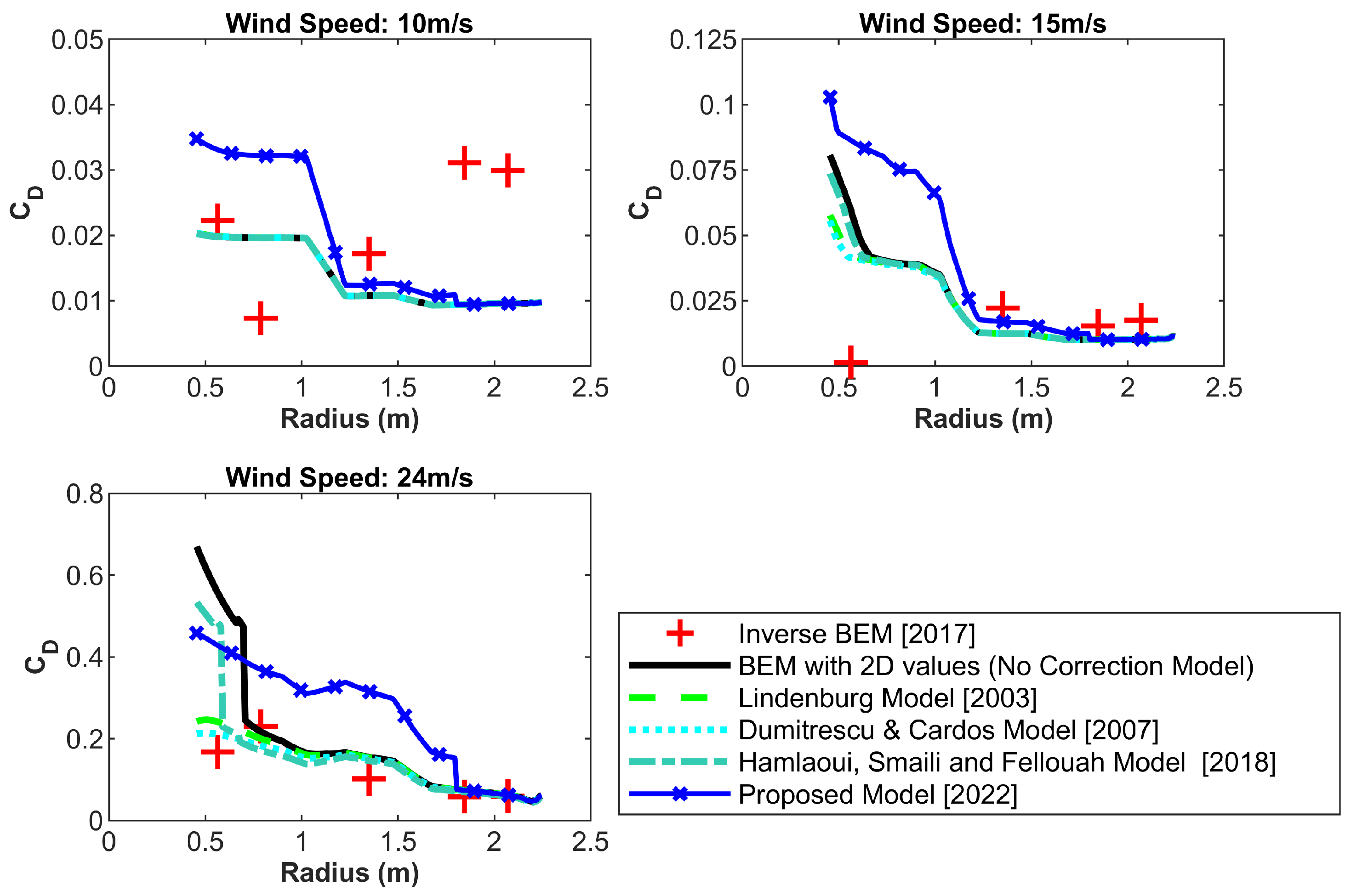
8.1.1. Angle of Attack Distribution
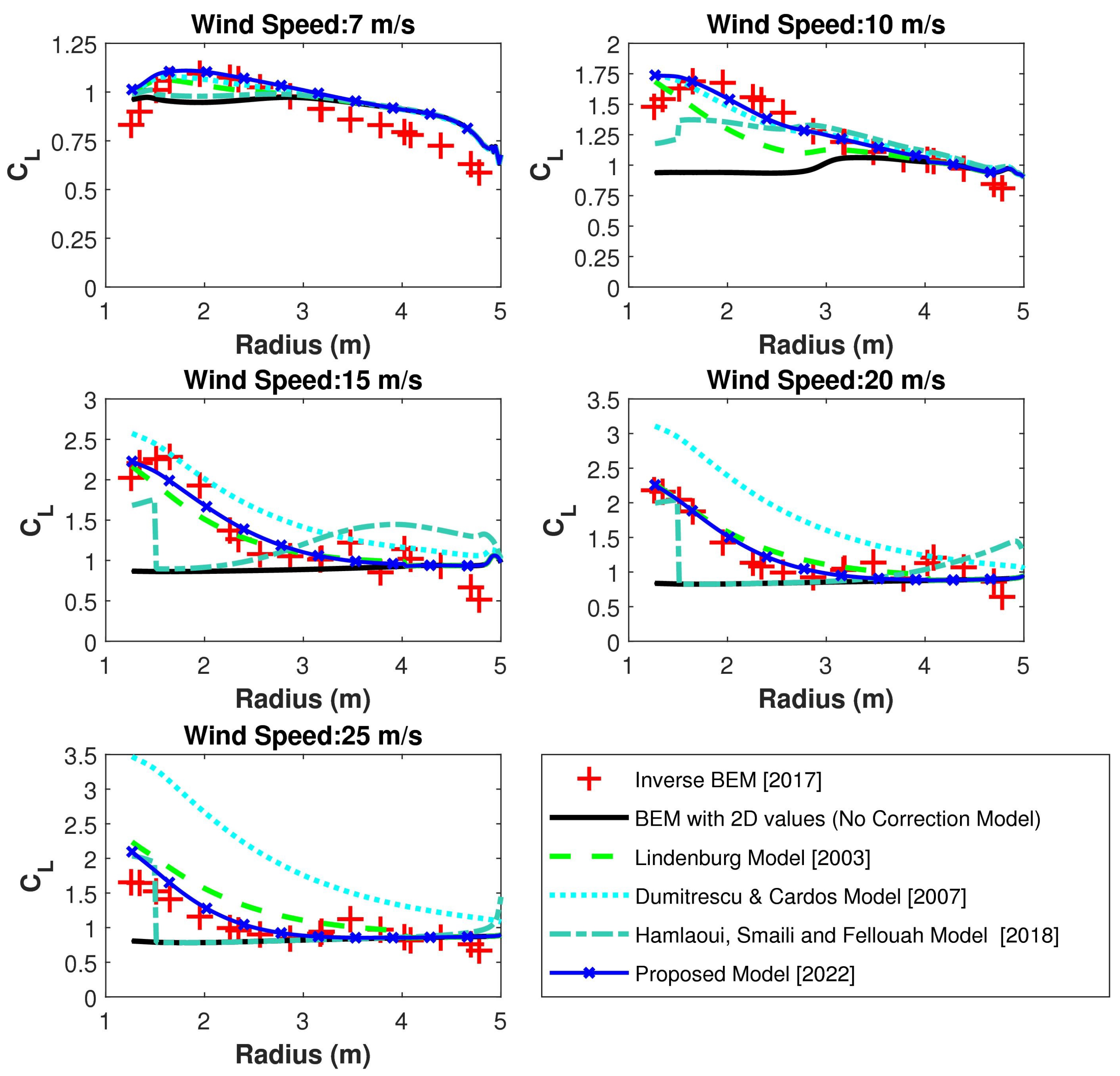
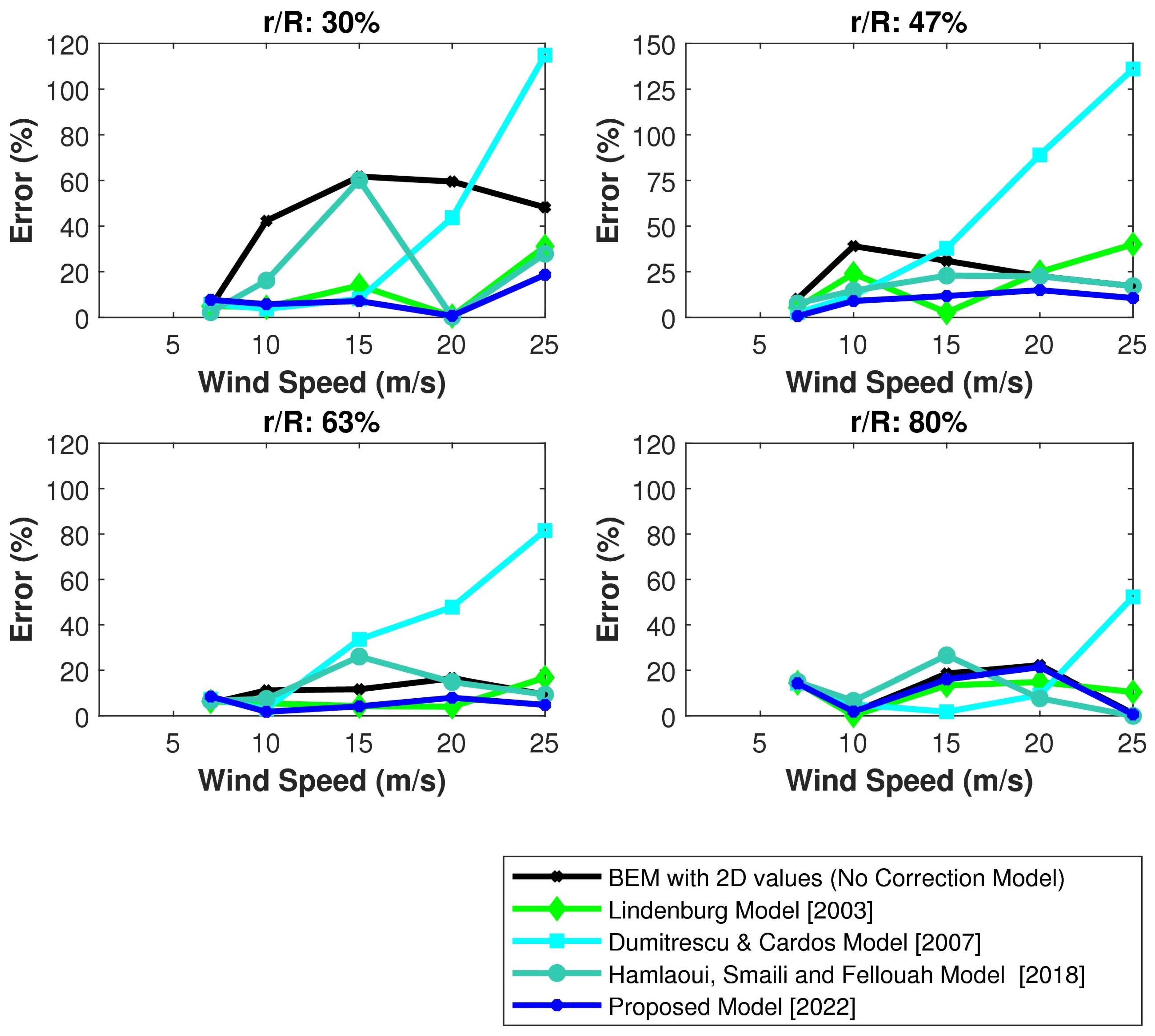
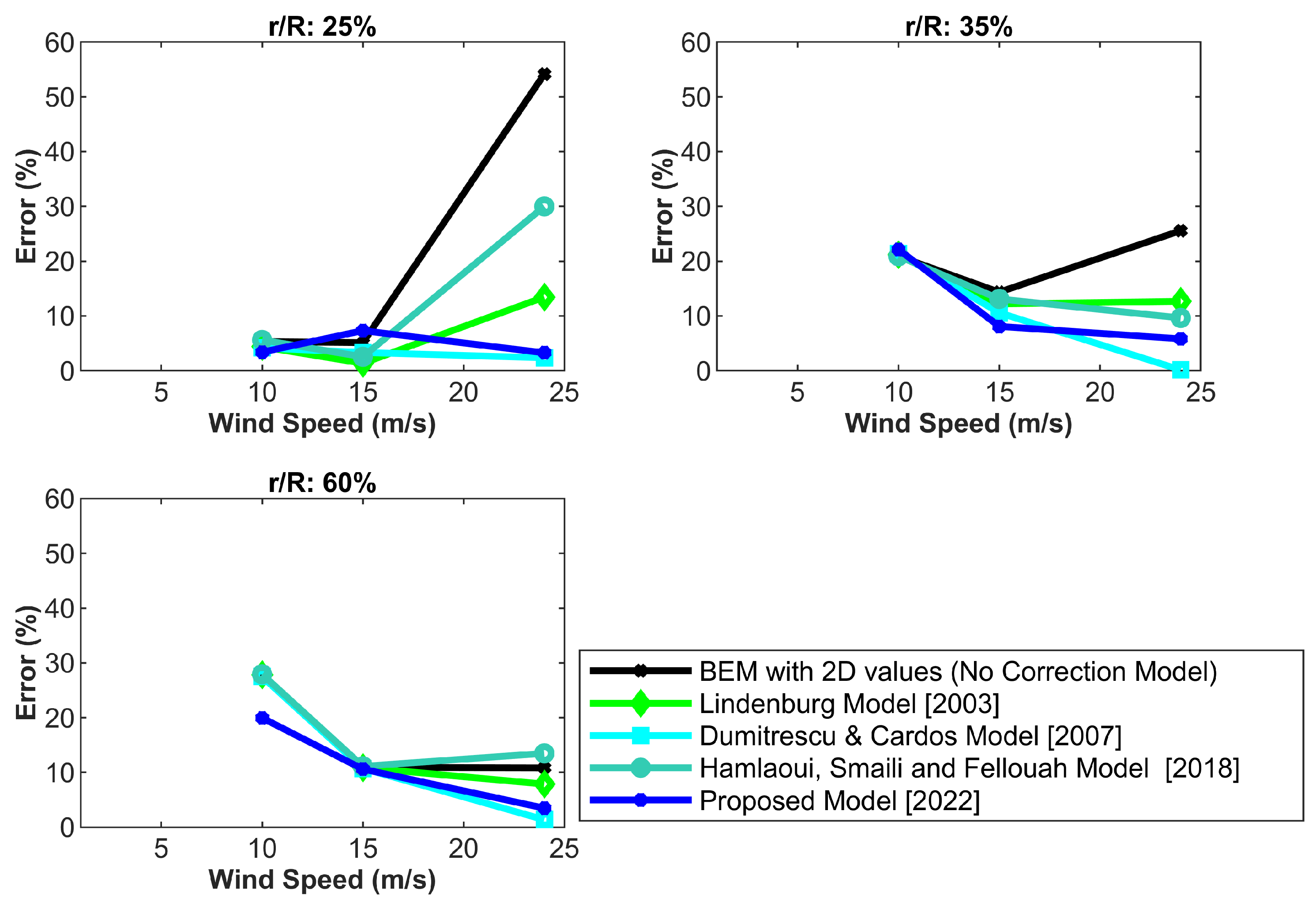
8.1.2. Comparison of Prediction throughout the Blade Length
8.1.3. Comparison of Prediction throughout the Blade Length
9. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| c | Local chord of the blade (m) |
| , , , | Constants in the proposed model |
| Lift coefficient (dimensionless) | |
| Drag coefficient (dimensionless) | |
| (=0) | Drag coefficient when AoA is zero (dimensionless) |
| Correction term or function for lift coefficient (dimensionless) | |
| Correction term or function for drag coefficient (dimensionless) | |
| r | Local radius of the blade (m) |
| R | Total radius of the blade (m) |
| Y | Ground truth for symbolic regression model |
| x | Inputs for symbolic regression model |
| N | Number of observations for symbolic regression model |
| Free-stream velocity (m/s) | |
| Relative velocity (m/s) | |
| Greek Symbols | |
| The following Greek symbols are used in this manuscript: | |
| Angle of attack (rad) | |
| Angle of attack when is zero (rad) | |
| Tip-speed ratio (dimensionless) | |
| Local tip-speed ratio (dimensionless) | |
| Product of and (dimensionless) | |
| Constant in Dumitrescu and Cardos stall correction model | |
| Angular velocity (rad/s) | |
| Abbreviations | |
| The following abbreviations are used in this manuscript: | |
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| AD | Actuator disk |
| AI | Artificial intelligence |
| AL | Actuator line |
| AoA | Angle of attack |
| AR | Aspect ratio |
| AS | Actuator surface |
| BEM | Blade element momentum |
| CFD | Computational fluid dynamics |
| DNW | German–Dutch wind tunnel |
| DUT | Delft University of Technology |
| ECN | Energy Research Centre |
| GA | Genetic algorithm |
| GP | Genetic programming |
| HAWT | Horizontal axis wind turbine |
| LES | Large eddy simulation |
| MEXICO | Model rotor EXperiments In COntrolled conditions |
| ML | Machine learning |
| MOCO | Multi-objective combinatorial optimization |
| NASA | National Aeronautics and Space Administration |
| NRB | Non-rotating blade |
| NREL | National Renewable Energy Laboratory |
| RB | Rotating blade |
| RMSE | Root mean square error |
| rpm | Revolutions per minute |
| SA | Simulated annealing |
| URANS | Unsteady Reynolds-averaged Navier–Stokes equations |
References
- Kabir, I.F.S.A.; Safiyullah, F.; Ng, E.Y.K.; Tam, V.W. New analytical wake models based on artificial intelligence and rivalling the benchmark full-rotor CFD predictions under both uniform and ABL inflows. Energy 2020, 193, 116761. [Google Scholar] [CrossRef]
- Liu, S.; Janajreh, I. Development and application of an improved blade element momentum method model on horizontal axis wind turbines. Int. J. Energy Environ. Eng. 2012, 3, 30. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Chen, J.; Shen, W.Z.; Zhu, W.J. Improved blade element momentum theory for wind turbine aerodynamic computations. Renew. Energy 2016, 96, 824–831. [Google Scholar] [CrossRef]
- Kabir, I.F.S.A.; Ng, E.Y.K. Insight into stall delay and computation of 3D sectional aerofoil characteristics of NREL phase VI wind turbine using inverse BEM and improvement in BEM analysis accounting for stall delay effect. Energy 2017, 120, 518–536. [Google Scholar] [CrossRef]
- Herráez, I.; Stoevesandt, B.; Peinke, J. Insight into rotational effects on a wind turbine blade using Navier–Stokes computations. Energies 2014, 7, 6798–6822. [Google Scholar] [CrossRef] [Green Version]
- Plaza, B.; Bardera, R.; Visiedo, S. Comparison of BEM and CFD results for MEXICO rotor aerodynamics. J. Wind Eng. Ind. Aerodyn. 2015, 145, 115–122. [Google Scholar] [CrossRef]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Lindenburg, C. Investigation into Rotor Blade Aerodynamics; ECN-C–03-025; Energy Research Centre of the Netherlands (ECN) Wind Energy Publication: Petten, The Netherlands, 2003. [Google Scholar]
- Hu, D.; Hua, O.; Du, Z. A study on stall-delay for horizontal axis wind turbine. Renew. Energy 2006, 31, 821–836. [Google Scholar] [CrossRef]
- Breton, S.P.; Coton, F.N.; Moe, G. A study on rotational effects and different stall delay models using a prescribed wake vortex scheme and NREL phase VI experiment data. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2008, 11, 459–482. [Google Scholar] [CrossRef]
- Breton, S.P. Study of the Stall Delay Phenomenon and of Wind Turbine Blade Dynamics Using Numerical Approaches and NREL’s Wind Tunnel Tests. 2008. Available online: https://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/231375/124628_FULLTEXT02.pdf?sequence=1 (accessed on 20 September 2022).
- Elgammi, M.; Sant, T. A new stall delay algorithm for predicting the aerodynamics loads on wind turbine blades for axial and yawed conditions. Wind Energy 2017, 20, 1645–1663. [Google Scholar] [CrossRef]
- Schreck, S.; Robinson, M. Rotational augmentation of horizontal axis wind turbine blade aerodynamic response. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2002, 5, 133–150. [Google Scholar] [CrossRef]
- Guntur, S.; Bak, C.; Sørensen, N.N. Analysis of 3D stall models for wind turbine blades using data from the MEXICO experiment. In Proceedings of the 13th International Conference on Wind Engineering, Amsterdam, The Netherlands, 10–15 July 2011. [Google Scholar]
- Himmelskamp, H. Profile Investigations on a Rotating Airscrew; Ministry of Aircraft Production: Göttingen, Germany, 1947. [Google Scholar]
- Banks, W.; Gadd, G. Delaying effect of rotation on laminar separation. AIAA J. 1963, 1, 941. [Google Scholar] [CrossRef]
- Dwyer, H.; McCROSKE, W. Crossflow and unsteady boundary-layer effects on rotating blades. AIAA J. 1971, 9, 1498–1505. [Google Scholar] [CrossRef]
- Milborrow, D. Changes in aerofoil characteristics due to radial flow on rotating blades. In Proceedings of the 7th BWEA Conference, Oxford, UK, 27–29 March 1985. [Google Scholar]
- Madsen, H.A.; Christensen, H. On the relative importance of rotational, unsteady and three-dimensional effects on the HAWT rotor aerodynamics. Wind. Eng. 1990, 14, 405–415. [Google Scholar]
- Ronsten, G. Static pressure measurements on a rotating and a non-rotating 2.375 m wind turbine blade. Comparison with 2D calculations. J. Wind Eng. Ind. Aerodyn. 1992, 39, 105–118. [Google Scholar] [CrossRef]
- Wood, D. A three-dimensional analysis of stall-delay on a horizontal-axis wind turbine. J. Wind Eng. Ind. Aerodyn. 1991, 37, 1–14. [Google Scholar] [CrossRef]
- Narramore, J.; Vermeland, R. Navier-Stokes calculations of inboard stall delay due to rotation. J. Aircr. 1992, 29, 73–78. [Google Scholar] [CrossRef]
- Snel, H.; Houwink, R.; Bosschers, J. Sectional Prediction of Lift Coefficients on Rotating Wind Turbine Blades in Stall. 1994. Available online: https://www.osti.gov/etdeweb/biblio/6693027 (accessed on 20 September 2022).
- Simms, D.; Schreck, S.; Hand, M.; Fingersh, L.J. NREL Unsteady Aerodynamics Experiment in the NASA-Ames Wind Tunnel: A Comparison of Predictions to Measurements; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 2001. [Google Scholar]
- Guntur, S.; Sørensen, N.N. An evaluation of several methods of determining the local angle of attack on wind turbine blades. J. Phys. Conf. Ser. 2014, 555, 012045. [Google Scholar] [CrossRef] [Green Version]
- Pereira, R. Validating the Beddoes-Leishman Dynamic Stall Model in the Horizontal Axis Wind Turbine Environment. Master’s Thesis, Department of Control and Operations, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Kabir, I.F.S.A. Improvement of Bem Analysis to Incorporate Stall Delay Effect and the Study of Atmospheric Boundary Layer Effect on the Wake Characteristics of NREL Phase VI Turbine. Ph.D. Thesis, School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore, 2018. [Google Scholar]
- Lindenburg, C. Modelling of rotational augmentation based on engineering considerations and measurements. In Proceedings of the European Wind Energy Conference, London, UK, 22–25 November 2004; pp. 22–25. [Google Scholar]
- Betz, A. Das Maximum der theoretisch möglichen Ausnutzung des Windes durch Windmotoren. Z. Fur Das Gesamte Turbinenwesten 1920, 26, 307–309. [Google Scholar]
- Glauert, H. The Elements of Aerofoil and Airscrew Theory; Cambridge University Press: Cambridge, UK, 1983. [Google Scholar]
- Hansen, M. Aerodynamics of Wind Turbines, 2nd ed.; Earthscan: London, UK, 2008. [Google Scholar]
- Hansen, A.; Butterfield, C. Aerodynamics of horizontal-axis wind turbines. Annu. Rev. Fluid Mech. 1993, 25, 115–149. [Google Scholar] [CrossRef]
- Leishman, J.G. Challenges in modelling the unsteady aerodynamics of wind turbines. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2002, 5, 85–132. [Google Scholar] [CrossRef]
- Rahimi, H.; Schepers, J.; Shen, W.Z.; García, N.R.; Schneider, M.; Micallef, D.; Ferreira, C.S.; Jost, E.; Klein, L.; Herráez, I. Evaluation of different methods for determining the angle of attack on wind turbine blades with CFD results under axial inflow conditions. Renew. Energy 2018, 125, 866–876. [Google Scholar] [CrossRef] [Green Version]
- Snel, H.; Houwink, R.; Bosschers, J.; Piers, W.; Van Bussel, G.J.; Bruining, A. Sectional Prediction of sD Effects for Stalled Flow on Rotating Blades and Comparison with Measurements. 1993. Available online: https://www.osti.gov/etdeweb/biblio/6222685 (accessed on 20 September 2022).
- Chaviaropoulos, P.; Hansen, M.O. Investigating three-dimensional and rotational effects on wind turbine blades by means of a quasi-3D Navier-Stokes solver. J. Fluids Eng. 2000, 122, 330–336. [Google Scholar] [CrossRef]
- Raj, N.V. An Improved Semi-Empirical Model for 3-D Post-Stall Effects in Horizontal Axis Wind Turbines. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Urbana-Champaign, IL, USA, 2000. [Google Scholar]
- Corrigan, J.J.; Schillings, J. Empirical model for stall delay due to rotation. In Proceedings of the American Helicopter Society Aeromechanics Specialists Conference, San Francisco, CA, USA, 19–21 January 1994; pp. 1–16. [Google Scholar]
- Bak, C.; Johansen, J.; Andersen, P.B. Three-dimensional corrections of airfoil characteristics based on pressure distributions. In Proceedings of the European Wind Energy Conference, Athens, Greece, 7 February–2 March 2006; pp. 1–10. [Google Scholar]
- Du, Z.; Selig, M. A 3-D stall-delay model for horizontal axis wind turbine performance prediction. In Proceedings of the 1998 ASME Wind Energy Symposium, Reno, NV, USA, 12–15 January 1998; p. 21. [Google Scholar]
- Dumitrescu, H.; Cardoş, V.; Dumitrache, A. Modelling of inboard stall delay due to rotation. J. Physics Conf. Ser. 2007, 75, 012022. [Google Scholar] [CrossRef] [Green Version]
- Dumitrescu, H.; Cardoş, V. Inboard boundary layer state on wind turbine blades. ZAMM-J. Appl. Math. Mech. Für Angew. Math. Und Mech. Appl. Math. Mech. 2009, 89, 163–173. [Google Scholar] [CrossRef]
- Dumitrescu, H.; Cardos, V. Inboard stall delay due to rotation. J. Aircr. 2012, 49, 101–107. [Google Scholar] [CrossRef] [Green Version]
- Hamlaoui, M.N.; Smaili, A.; Fellouah, H. Improved BEM Method for HAWT Performance Predictions. In Proceedings of the 2018 International Conference on Wind Energy and Applications in Algeria (ICWEAA), Algiers, Algeria, 6–7 November 2018; pp. 1–6. [Google Scholar]
- Hand, M.; Simms, D.; Fingersh, L.; Jager, D.; Cotrell, J.; Schreck, S.; Larwood, S. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaigns; Technical Report; National Renewable Energy Lab.: Golden, CO, USA, 2001. [Google Scholar]
- Schepers, J.; Lutz, T.; Boorsma, K.; Gomez-Iradi, S.; Herraez, I.; Oggiano, L.; Rahimi, H.; Schaffarczyk, P.; Pirrung, G.; Madsen, H.A.; et al. Final Report of Iea Wind Task 29 Mexnext (Phase 3); ECN: Petten, The Netherlands, 2018. [Google Scholar]
- Purohit, S.; Kabir, I.F.S.A.; Ng, E.Y.K. On the Accuracy of uRANS and LES-Based CFD Modeling Approaches for Rotor and Wake Aerodynamics of the (New) MEXICO Wind Turbine Rotor Phase-III. Energies 2021, 14, 5198. [Google Scholar] [CrossRef]
- Khan, M.Z.; Gajendran, M.K.; Lee, Y.; Khan, M.A. Deep Neural Architectures for Medical Image Semantic Segmentation. IEEE Access 2021, 9, 83002–83024. [Google Scholar] [CrossRef]
- Gajendran, M.K.; Khan, M.Z.; Khattak, M.A.K. ECG Classification using Deep Transfer Learning. In Proceedings of the 2021 4th International Conference on Information and Computer Technologies (ICICT), Kahului, Maui Island, HI, USA, 11–14 March 2021; pp. 1–5. [Google Scholar]
- Jahmunah, V.; Ng, E.; San, T.R.; Acharya, U.R. Automated detection of coronary artery disease, myocardial infarction and congestive heart failure using GaborCNN model with ECG signals. Comput. Biol. Med. 2021, 134, 104457. [Google Scholar] [CrossRef]
- Gajendran, M.K.; Rohowetz, L.J.; Koulen, P.; Mehdizadeh, A. Novel machine-learning based framework using electroretinography data for the detection of early-stage glaucoma. Front. Neurosci. 2022, 15, 869137. [Google Scholar] [CrossRef]
- Karray, F.; Karray, F.O.; De Silva, C.W. Soft Computing and Intelligent Systems Design: Theory, Tools, and Applications; Pearson Education: London, UK, 2004. [Google Scholar]
- Londhe, S.N.; Dixit, P.R. Genetic programming: A novel computing approach in modeling water flows. In Genetic Programming-New Approaches and Successful Applications; IntechOpen Publishing: London, UK, 2012. [Google Scholar]
- Yager, R.R.; Zadeh, L.A.; Kosko, B.; Grossberg, S. Fuzzy Sets, Neural Networks, and Soft Computing; Technical Report; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1994. [Google Scholar]
- Magdalena, L. What is soft computing? Revisiting possible answers. Int. J. Comput. Intell. Syst. 2010, 3, 148–159. [Google Scholar]
- Ibrahim, D. An overview of soft computing. Procedia Comput. Sci. 2016, 102, 34–38. [Google Scholar] [CrossRef] [Green Version]
- Safiyullah, F.; Sulaiman, S.; Naz, M.; Jasmani, M.; Ghazali, S. Prediction on performance degradation and maintenance of centrifugal gas compressors using genetic programming. Energy 2018, 158, 485–494. [Google Scholar] [CrossRef]
- Draper, N.R.; Smith, H. Applied Regression Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1998; Volume 326. [Google Scholar]
- Chatterjee, S.; Hadi, A.S. Regression Analysis by Example; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Smits, G.F.; Kotanchek, M. Pareto-front exploitation in symbolic regression. In Genetic Programming Theory and Practice II; Springer: Berlin/Heidelberg, Germany, 2005; pp. 283–299. [Google Scholar]
- Morales, C.O.; Vázquez, K.R. Symbolic regression problems by genetic programming with multi-branches. In Proceedings of the Mexican International Conference on Artificial Intelligence, Mexico City, Mexico, 26–30 April 2004; pp. 717–726. [Google Scholar]
- Stinstra, E.; Rennen, G.; Teeuwen, G. Metamodeling by symbolic regression and Pareto simulated annealing. Struct. Multidiscip. Optim. 2008, 35, 315–326. [Google Scholar] [CrossRef]
- Schmidt, M.; Lipson, H. Distilling free-form natural laws from experimental data. Science 2009, 324, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Gajendran, M.K.; Kabir, I.F.S.A.; Purohit, S.; Ng, E. On the Limitations of Machine Learning (ML) Methodologies in Predicting the Wake Characteristics of Wind Turbines. In Renewable Energy Systems in Smart Grid; Springer: Berlin/Heidelberg, Germany, 2022; pp. 15–23. [Google Scholar]
- Sørensen, N.N.; Michelsen, J.; Schreck, S. Navier–Stokes predictions of the NREL phase VI rotor in the NASA Ames 80 ft × 120 ft wind tunnel. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2002, 5, 151–169. [Google Scholar] [CrossRef]
- Johansen, J.; Sørensen, N.N. Aerofoil characteristics from 3D CFD rotor computations. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2004, 7, 283–294. [Google Scholar] [CrossRef]
- Tangler, J.; Kocurek, D. Wind turbine post-stall airfoil performance characteristics guidelines for blade-element momentum methods. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; p. 591. [Google Scholar]
- Sant, T.; van Kuik, G.; Van Bussel, G. Estimating the angle of attack from blade pressure measurements on the NREL phase VI rotor using a free wake vortex model: Axial conditions. Wind Energy Int. J. Prog. Appl. Wind Power Convers. Technol. 2006, 9, 549–577. [Google Scholar] [CrossRef]
- Schepers, J.; Van Rooij, R. Analysis of Aerodynamic Measurements on a Model Wind Turbine Placed in the NASA-Ames Tunnel. Contribution of ECN and TUD to IEA Wind Task XX. 2008. Available online: https://publications.tno.nl/publication/34628905/hf75V2/e08052.pdf (accessed on 20 September 2022).
- Viterna, L.A.; Corrigan, R.D. Fixed pitch rotor performance of large horizontal axis wind turbines. In Proceedings of the NASA Lewis Research Center: Energy Production and Conversion Workshop, Cleveland, OH, USA, 1 January 1982; Volume 1. [Google Scholar]
- Du, Z.; Selig, M. The effect of rotation on the boundary layer of a wind turbine blade. Renew. Energy 2000, 20, 167–181. [Google Scholar] [CrossRef]
- Kabir, I.F.S.A.; Ng, E.Y.K. Effect of different atmospheric boundary layers on the wake characteristics of NREL phase VI wind turbine. Renew. Energy 2019, 130, 1185–1197. [Google Scholar] [CrossRef]
- Purohit, S.; Kabir, I.F.S.A.; Ng, E.Y.K. Evaluation of three potential machine learning algorithms for predicting the velocity and turbulence intensity of a wind turbine wake. Renew. Energy 2022, 184, 405–420. [Google Scholar] [CrossRef]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; Technical report; National Renewable Energy Lab.: Golden, CO, USA, 2005. [Google Scholar]
- Bangga, G.; Lutz, T.; Arnold, M. An improved second-order dynamic stall model for wind turbine airfoils. Wind Energy Sci. 2020, 5, 1037–1058. [Google Scholar] [CrossRef]
- Küppers, J.P.; Reinicke, T. A WaveNet-Based Fully Stochastic Dynamic Stall Model. In Wind Energy Science Discussions; Copernicus GmbH: Göttingen, Germany, 2022; pp. 1–24. Available online: https://wes.copernicus.org/preprints/wes-2022-13/ (accessed on 20 September 2022).
- Ferreira, C.; Yu, W.; Sala, A.; Viré, A. Dynamic inflow model for a floating horizontal axis wind turbine in surge motion. Wind Energy Sci. 2022, 7, 469–485. [Google Scholar] [CrossRef]
- Castellani, F.; Astolfi, D.; Natili, F.; Mari, F. The yawing behavior of horizontal-axis wind turbines: A numerical and experimental analysis. Machines 2019, 7, 15. [Google Scholar] [CrossRef] [Green Version]
- Kavari, G.; Tahani, M.; Mirhosseini, M. Wind shear effect on aerodynamic performance and energy production of horizontal axis wind turbines with developing blade element momentum theory. J. Clean. Prod. 2019, 219, 368–376. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Syed Ahmed Kabir, I.F.; Gajendran, M.K.; Ng, E.Y.K.; Mehdizadeh, A.; Berrouk, A.S. Novel Machine-Learning-Based Stall Delay Correction Model for Improving Blade Element Momentum Analysis in Wind Turbine Performance Prediction. Wind 2022, 2, 636-658. https://doi.org/10.3390/wind2040034
Syed Ahmed Kabir IF, Gajendran MK, Ng EYK, Mehdizadeh A, Berrouk AS. Novel Machine-Learning-Based Stall Delay Correction Model for Improving Blade Element Momentum Analysis in Wind Turbine Performance Prediction. Wind. 2022; 2(4):636-658. https://doi.org/10.3390/wind2040034
Chicago/Turabian StyleSyed Ahmed Kabir, Ijaz Fazil, Mohan Kumar Gajendran, E. Y. K. Ng, Amirfarhang Mehdizadeh, and Abdallah S. Berrouk. 2022. "Novel Machine-Learning-Based Stall Delay Correction Model for Improving Blade Element Momentum Analysis in Wind Turbine Performance Prediction" Wind 2, no. 4: 636-658. https://doi.org/10.3390/wind2040034
APA StyleSyed Ahmed Kabir, I. F., Gajendran, M. K., Ng, E. Y. K., Mehdizadeh, A., & Berrouk, A. S. (2022). Novel Machine-Learning-Based Stall Delay Correction Model for Improving Blade Element Momentum Analysis in Wind Turbine Performance Prediction. Wind, 2(4), 636-658. https://doi.org/10.3390/wind2040034